Groupe (mathématiques)
En mathématiques, un groupe est une des structures algébriques fondamentales de l'algèbre générale. C'est un ensemble muni d'une loi de composition interne associative admettant un élément neutre et, pour chaque élément de l'ensemble, un élément symétrique.

La structure de groupe est commune à de nombreux ensembles de nombres — par exemple les nombres entiers relatifs, munis de la loi d'addition. Mais cette structure se retrouve aussi dans de nombreux autres domaines, notamment en algèbre, ce qui en fait une notion centrale des mathématiques modernes.
La structure de groupe possède un lien étroit avec la notion de symétrie[1]. Un groupe de symétrie décrit les symétries d'une forme géométrique : il consiste en un ensemble de transformations géométriques qui laissent l'objet invariant, l'opération consistant à composer de telles transformations, c'est-à-dire à les appliquer l'une après l'autre. De tels groupes de symétrie, en particulier les groupes de Lie continus, jouent un rôle important dans de nombreuses sciences[2]. Ces derniers, par exemple, sont les groupes de symétries utilisés dans le modèle standard de la physique des particules. Les groupes généraux linéaires sont, quant à eux, utilisés en physique fondamentale, afin de comprendre les lois de la relativité restreinte et les phénomènes liés à la symétrie des molécules en chimie.
Le concept de groupe fit son apparition dans l'étude des équations polynomiales. En effet, c'est Évariste Galois qui, durant les années 1830, utilisa pour la première fois le terme « groupe » dans un sens technique similaire à ce qui est utilisé de nos jours, faisant de lui un des fondateurs de la théorie des groupes. À la suite de contributions d'autres domaines des mathématiques, comme la théorie des nombres et la géométrie, la notion de groupe fut généralisée et plus fermement établie autour des années 1870.
La théorie des groupes moderne, une branche des mathématiques toujours active, se concentre donc sur la structure de groupes abstraits, indépendamment de leur utilisation extra-mathématique[3]. Ce faisant, les mathématiciens ont défini, au fil des années, plusieurs notions permettant de fragmenter des groupes en des objets plus petits et plus compréhensibles ; les sous-groupes, groupes quotients, sous-groupes normaux et les groupes simples en sont quelques exemples. En plus d'étudier ces types de structures, les théoriciens de groupes s'intéressent aussi aux différentes façons dont un groupe peut être exprimé concrètement, autant du point du vue de la théorie des représentations que du point de vue computationnel. La théorie des groupes finis fut développée avec, comme point culminant, la classification des groupes finis simples, achevée en 2004[4]. Depuis le milieu des années 1980, la théorie géométrique des groupes, qui s'intéresse aux groupes de type fini en tant qu'objets géométriques, est devenue un champ particulièrement actif de la théorie des groupes.
Définition et illustration
Premier exemple : les entiers relatifs
Un des groupes les plus communs est l'ensemble des entiers relatifs ℤ, qui est constitué des nombres
- ..., −4, −3, −2, −1, 0, 1, 2, 3, 4, ...
Les propriétés suivantes de l'addition usuelle servent de modèle pour les axiomes de la définition générale donnée plus bas.
- Pour deux entiers quelconques a et b, la somme a+b est aussi un entier. En d'autres termes, le fait d'additionner deux entiers ne peut jamais mener à un résultat non entier. On dit que l'addition est une loi de composition interne.
- Pour tous entiers a, b et c, (a + b) + c = a + (b + c). Littéralement, additionner d'abord a et b, puis ajouter c au résultat donne le même résultat final qu'ajouter a à la somme de b et c. Cette propriété est nommée associativité.
- Si a est un entier, alors 0 + a = a + 0 = a. Zéro est ce qu'on appelle un élément neutre pour l'addition, parce qu'ajouter 0 à tout entier donne cet entier.
- Pour tout entier a, il existe un entier b tel que a + b = b + a = 0. L'entier b est appelé l'élément symétrique de l'entier a et est noté −a (pour l'addition, on dit aussi opposé).
Définition
Les entiers relatifs, munis de l'opération « + », forment un objet mathématique qui appartient à une vaste classe d'objets partageant des similarités de structure. La définition formelle suivante, qui englobe l'exemple précédent et beaucoup d'autres, dont les groupes de symétries détaillés plus bas, permet de comprendre ces structures sans traiter chaque cas séparément.
Un groupe est un couple (G, • ) dont le premier terme est un ensemble G et le second une opération « • » (on dit aussi loi de composition) sur cet ensemble qui, à deux éléments a et b de G, associe un autre élément a • b. Le symbole « • » est un signe général qui désigne une opération donnée, comme l'addition ci-dessus. On exige que la loi satisfasse quatre propriétés : les axiomes de groupe[5].
- Loi de composition interne
- Pour tous a et b éléments de G, le résultat a • b est aussi dans G.
- Associativité
- Pour tous éléments a, b et c de G, l'égalité (a • b) • c = a • (b • c) est vraie.
- Élément neutre
- Il existe un élément e de G tel que, pour tout a dans G, e • a = a • e = a, "e" est appelé élément neutre du groupe (G, •).
- Symétrique
- Pour tout élément a de G, il existe b dans G tel que a • b = b • a = e, où e est l'élément neutre. b est appelé symétrique de a.
L'ordre des arguments peut ne pas être indifférent, autrement dit l'égalité :
- a • b = b • a
n'est pas toujours vraie. Un groupe dans lequel on a toujours a • b = b • a est dit commutatif, ou abélien (en l'honneur de Niels Abel)[5]. Ainsi, le groupe additif des nombres entiers relatifs est abélien mais le groupe de symétrie décrit ci-dessous ne l'est pas.
Remarque sur le vocabulaire
- Lorsque la loi est notée additivement (c'est-à-dire que l'on note a + b pour a • b) :
- le symétrique est appelé opposé et l'opposé de a est noté −a ;
- le neutre est souvent appelé zéro et noté 0.
- Lorsque la loi est notée multiplicativement (c'est-à-dire que l'on note ab pour a • b) :
- le symétrique est appelé inverse et l'inverse de a est noté a−1 ;
- le neutre est parfois appelé unité et noté 1.
En pratique, on limite l'utilisation de la notation additive aux groupes abéliens.
Deuxième exemple : un groupe de symétrie
Les symétries (c'est-à-dire les rotations et réflexions) d'un carré munies de la composition forment un groupe appelé groupe diédral et noté D4 ou D8, selon les auteurs. Pour des raisons indiquées dans l'article Groupe diédral, on adoptera ici la notation D8. Voici la liste des éléments de ce groupe :
 id (identité : chaque point est conservé) |  r1 (rotation de 90° vers la droite) | 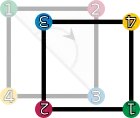 r2 (rotation de 180°) |  r3 (rotation de 270° vers la droite) |
 fv (retournement vertical) | 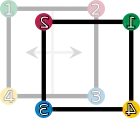 fh (retournement horizontal) |  fd (retournement suivant la première diagonale) |  fc (retournement suivant la deuxième diagonale) |
| Les éléments du groupe de symétrie (D8). Les sommets sont colorés et numérotés uniquement pour visualiser les transformations. | |||
- l'application identité, laissant tout inchangé, est notée id ;
- les rotations de 90° , 180° et 270° vers la droite, notées respectivement r1, r2 et r3. Le centre de toutes ces rotations est le point d'intersection des diagonales du carré ;
- les réflexions ayant pour axes les médiatrices des côtés du carré (fh et fv) ou ses diagonales (fd et fc).
Deux symétries quelconques peuvent être composées, c'est-à-dire appliquées l'une après l'autre. Le résultat obtenu en exerçant a puis b est écrit symboliquement
- b • a (« appliquer la symétrie b après avoir appliqué a. » L'écriture de droite à gauche utilisée ici provient de la composition de fonctions.)
Le groupe D8 est décrit par la table de Cayley ci-contre. Il s'agit d'un tableau analogue aux tables de multiplications des écoliers.
- Ainsi, à l'intersection de la ligne fh et de la colonne r3 se trouve fd (case coloriée en bleu). Cela signifie que
- fh • r3 = fd.
- Autrement dit, appliquer au carré une rotation d'angle 270° vers la droite (r3) puis un retournement horizontal (fh) revient à lui appliquer un retournement suivant la première diagonale (fd).
| • | id | r1 | r2 | r3 | fv | fh | fd | fc |
|---|---|---|---|---|---|---|---|---|
| id | id | r1 | r2 | r3 | fv | fh | fd | fc |
| r1 | r1 | r2 | r3 | id | fc | fd | fv | fh |
| r2 | r2 | r3 | id | r1 | fh | fv | fc | fd |
| r3 | r3 | id | r1 | r2 | fd | fc | fh | fv |
| fv | fv | fd | fh | fc | id | r2 | r1 | r3 |
| fh | fh | fc | fv | fd | r2 | id | r3 | r1 |
| fd | fd | fh | fc | fv | r3 | r1 | id | r2 |
| fc | fc | fv | fd | fh | r1 | r3 | r2 | id |
| Les éléments id, r1, r2, et r3 forment un sous-groupe, colorié en rouge (en haut à gauche). Deux classes à gauche et à droite suivant ce sous-groupe sont en vert (dernière ligne) et jaune (dernière colonne), respectivement. | ||||||||
Étant donnés cet ensemble de symétrie et l'opération décrite ci-dessus, les axiomes de groupes peuvent être compris ainsi :
- L'opération doit être une loi de composition interne : pour toutes symétries a et b, b • a doit être aussi une symétrie du carré. Par exemple r3 • fh = fc
c'est-à-dire que faire pivoter le carré de 270° vers la droite après l'avoir retourné horizontalement revient à l'avoir retourné suivant la deuxième diagonale (fc). Toutes les combinaisons de deux symétries donnent une symétrie, comme l'atteste la table de Cayley ci-contre. - L'hypothèse d'associativité traite de la composition de plus de deux symétries : soient trois éléments a, b et c de D8, il existe deux façons de calculer « a puis b puis c ». La condition
- a • (b • c) = (a • b) • c
- signifie que la composition de trois éléments est indépendante de l'ordre de priorité des opérations. Cela peut aussi être vérifié en examinant la table de Cayley ci-contre. Par exemple, on peut remarquer que
- (fd • fv) • r2 = r3 • r2 = r1
- est égal à
- fd • (fv • r2) = fd • fh = r1
- L'élément neutre est la symétrie notée id, qui laisse tout invariant. Quelle que soit la symétrie a, composer a et id revient à appliquer a :
- id • a = a,
- a • id = a.
- Un élément symétrique est la transformation réciproque d'une symétrie donnée. Chaque symétrie peut être « défaite ». Chacune des transformations id, fh, fv, fd, fc et la rotation à 180° r2 est son propre symétrique, ce qui revient à dire qu'appliquer deux fois une de ces transformations revient à laisser le carré invariant. Les rotations r3 et r1 sont symétriques l'une de l'autre. Formellement, on écrit :
- fh • fh = id,
- r3 • r1 = r1 • r3 = id.
Au contraire du groupe des entiers déjà cité, l'ordre dans lequel sont effectuées les opérations est important, dans D8 : fh • r1 = fc mais r1 • fh = fd. On dit que D8 n'est pas commutatif. On voit ici que la structure de groupe est plus délicate que le premier exemple sur les entiers pouvait le laisser supposer.
Histoire
Le concept moderne et abstrait de groupe se développa à travers différents champs des mathématiques.
La motivation originelle de la théorie des groupes fut la recherche des solutions des équations polynomiales de degré supérieur à quatre. Au XIXe siècle, le mathématicien français Évariste Galois, développant des travaux précédents de Paolo Ruffini et Joseph-Louis Lagrange, donna un critère de résolubilité d'équations polynomiales particulières en termes de groupe de symétrie de leurs racines[6]. Les éléments d'un tel groupe (appelé groupe de Galois) correspondent à certaines permutations des racines. Les idées de Galois furent méconnues par ses contemporains et publiées seulement à titre posthume. Des groupes de permutations plus généraux furent étudiés par Augustin Louis Cauchy[6]. Arthur Cayley, dans un article de 1854, donna la première définition abstraite d'un groupe fini.
La géométrie fut le second domaine dans lequel les groupes furent systématiquement utilisés, en particulier dans le programme d'Erlangen de Felix Klein, en 1872[6]. Après que de nouvelles géométries, comme la géométrie hyperbolique et la géométrie projective, eurent émergé, Klein utilisa la théorie des groupes pour les organiser en un système cohérent. En prolongeant ces idées, Sophus Lie posa les fondations de l'étude des groupes de Lie en 1884.
Le troisième domaine qui contribua à la théorie des groupes fut la théorie des nombres. Certaines structures de groupe abélien ont été implicitement utilisées par Carl Friedrich Gauss dans ses Disquisitiones Arithmeticae (1798)[7], et plus explicitement par Leopold Kronecker. En 1847, Ernst Kummer mena les premières tentatives de preuve du dernier théorème de Fermat à leur point culminant en développant une factorisation des groupes en nombres premiers.
La convergence de ces différentes sources en une théorie des groupes uniforme commença avec le Traité des substitutions et des équations algébriques (1870) de Camille Jordan. Walther von Dyck, qui fut un élève de Félix Klein, donne dès 1882 un énoncé moderne de la définition d'un groupe abstrait[8]. Durant le XXe siècle, les groupes gagnèrent une grande reconnaissance avec les travaux de Ferdinand Georg Frobenius et William Burnside, qui travaillèrent sur la théorie des représentations d'un groupe fini, la théorie des représentations modulaires (en) de Richard Brauer et les articles de Issai Schur. La théorie des groupes de Lie, et plus généralement des groupes localement compacts fut développée par Hermann Weyl, Élie Cartan et beaucoup d'autres. Son aspect algébrique, la théorie des groupes algébriques, fut tout d'abord formée par Claude Chevalley, à la fin des années 1930, puis par le travail essentiel d'Armand Borel et Jacques Tits.
En 1960-61, l'Année de la théorie des groupes de l'université de Chicago rassembla de nombreux spécialistes comme Daniel Gorenstein, John G. Thompson et Walter Feit et jeta les bases d'une collaboration qui, avec l'apport de nombreux autres mathématiciens, aboutit à la classification des groupes simples finis en 1982. Ce projet dépassa les efforts précédents par son ampleur, tant au niveau de la longueur de la preuve que du nombre de chercheurs impliqués. La recherche continue pour simplifier la démonstration de cette classification. De nos jours, la théorie des groupes reste une branche très active des mathématiques avec un fort impact sur les autres domaines.
Conséquences élémentaires de la définition
Quelques conséquences élémentaires peuvent être tirées de l'étude de la définition.
Plus de deux éléments
L'axiome d'associativité permet de définir l'opération sur trois éléments et non plus deux, en « levant » les parenthèses. En effet, quels que soient les éléments a, b et c du groupe, il est possible de définir a • b • c sans ambigüité :
- a • b • c = (a • b) • c = a • (b • c).
Puisque les parenthèses peuvent être écrites n'importe où dans une série de plusieurs termes, il est d'usage de les omettre.
Affaiblissement des axiomes
Les axiomes peuvent être réduits. Par exemple, on obtient une définition équivalente si on remplace les deux derniers axiomes de la définition ci-dessus par la condition suivante :
Il existe un élément e de G qui est neutre à gauche (c'est-à-dire que, pour tout a dans G, e • a = a) et tel que pour tout élément a de G, il existe b dans G tel que b • a = e (ce qu'on peut exprimer en disant que tout élément de G admet un symétrique à gauche en association avec e).
Unicité de l'élément neutre et des symétriques
Il y a unicité de l'élément neutre et, pour chaque élément a du groupe, unicité du symétrique de a. Cela signifie qu'un groupe possède exactement un élément neutre et que chaque élément du groupe possède un et un seul symétrique. L'emploi de l'article défini est donc correct : on parle du « symétrique » d'un élément et du « neutre » du groupe.
Régularité
Dans un groupe, tout élément a est régulier, ou « simplifiable », c'est-à-dire que si a • x = a • y ou si x • a = y • a, alors x = y (cela se déduit du fait que a est symétrisable, et de l'associativité).
Concepts essentiels
Pour comprendre les groupes au-delà des manipulations symboliques présentées ci-dessus, d'autres concepts doivent être employés. Ils suivent tous un principe sous-jacent : pour bénéficier de la structure de groupe, les constructions liées à un groupe doivent être « compatibles » avec sa loi de composition. Cette compatibilité se manifeste de différentes façons. Par exemple, des groupes peuvent être reliés entre eux par des fonctions appelées morphismes de groupes, c'est-à-dire des fonctions qui conservent la structure de groupe. La structure des groupes peut aussi être étudiée en les « cassant » en morceaux plus simples, appelés sous-groupes ou groupes quotients[9]. Ce principe de conservation des structures est l'idée centrale de la théorie des catégories, dans laquelle on parle de catégorie des groupes.
Morphisme de groupes
Pour que les morphismes de groupes soient les fonctions « compatibles avec la structure de groupe », on adopte la définition suivante :
Une fonction f : G → H entre deux groupes munis respectivement de deux lois • et * est un morphisme si l'égalité
- f(a • b) = f(a) * f(b).
est vraie pour tous les éléments a et b de G, c'est-à-dire que le résultat est le même, que l'on effectue l'opération avant ou après avoir appliqué la fonction f.
On démontre (au début de l'article détaillé) qu'alors, f est bien « compatible » non seulement avec les lois des deux groupes, mais avec leurs neutres et symétriques respectifs ; plus précisément : l'image de l'élément neutre du groupe (G ; •) est l'élément neutre de (H ; *) et l'image du symétrique a−1 de tout élément a est le symétrique de l'image de a, autrement dit : f(a−1) = f(a)−1.
Deux groupes G et H sont dits isomorphes s'il existe deux morphismes de groupes f : G → H et g : H → G tels que la composée de ces deux fonctions, quel que soit l'ordre, donne l'identité. C'est-à-dire que, quels que soient a élément de G et b de H,
- g(f(a)) = a et
- f(g(b)) = b.
Du point de vue de la structure de groupe, G et H sont en quelque sorte « le même groupe ».
Sous-groupe

Intuitivement, un sous-groupe est un groupe H inclus dans un autre groupe G. Cela signifie que l'élément neutre de G est contenu dans H et, quels que soient h1 et h2 éléments de H, h1 • h2 et h1−1 appartiennent aussi à H.
Dans l'exemple du groupe D8 ci-dessus, l'identité et les rotations forment un sous-groupe R = {id, r1, r2, r3} coloré en rouge dans le tableau : la composée de deux rotations est une rotation et chaque rotation a pour symétrique une rotation, celle telle que la somme des angles des deux rotations est 360° (un tour complet).
Une condition nécessaire et suffisante pour qu'un sous-ensemble H d'un groupe G soit un sous-groupe de G est qu'il soit non vide et que, quels que soient les éléments a et b de H :
- a−1 • b ∈ H.
Cela permet par exemple de montrer que l'image d'un morphisme de groupes est un sous-groupe du groupe d'arrivée.
La connaissance du treillis des sous-groupes d'un groupe donné est importante pour la compréhension de ce groupe.
Étant donné un sous-ensemble S d'un groupe G, le sous-groupe engendré par S est constitué par tous les produits des éléments de S avec des symétriques de ces éléments, l'opération pouvant être répétée plusieurs fois. C'est le plus petit sous-groupe contenant S. Dans l'exemple D8, le sous-groupe engendré par r2 et fv est constitué de ces deux éléments, de l'identité et de fh = fv • r2. C'est un sous-groupe, car combiner deux éléments, ou leurs symétriques donne un élément de cet ensemble.
Si un groupe est engendré par un de ses éléments, on dit qu'il est monogène. Si le groupe est de plus fini, on le dit cyclique. Par exemple, le groupe (Z ; +) des entiers relatifs est monogène car il est engendré par le seul élément 1 : on peut obtenir n'importe quel entier en ajoutant 1 avec lui-même ou avec son opposé -1. Le sous-groupe de Z engendré par 2 est constitué des nombres pairs (noté 2Z), celui qui est engendré par 3 est le sous-groupe des multiples de 3 (noté 3Z), etc.
Classe suivant un sous-groupe
Dans de nombreuses situations, il est souhaitable de considérer que deux éléments d'un groupe sont les mêmes s'ils diffèrent d'un élément d'un sous-groupe donné.
Par exemple, dans D8, une fois qu'un retournement a été effectué, le carré ne peut jamais revenir à la position de r2 par application de rotations, sans autre retournement. Il est possible de classer les figures du carré données dans l'exemple ci-dessus suivant deux parties : celle qui rassemble les figures pour lesquelles la suite des sommets 1-2-3-4 est parcourue dans le sens des aiguilles d'une montre, et celle des figures où 1-2-3-4 est parcouru dans l'autre sens. Il est possible de passer d'une figure d'une de ces parties à une autre par un retournement, mais aucune rotation ne permet de passer d'un carré de type « 1-2-3-4 dans le sens des aiguilles d'une montre » à un carré de l'autre type. Ainsi, deux figures du même type diffèrent d'une rotation.
La notion de classe suivant un sous-groupe formalise ceci : un sous-groupe H définit une classe à gauche et une classe à droite, qui peuvent être vues comme des translations de H par des éléments arbitraires g du groupe. Les classe à gauche et classe à droite suivant H contenant g sont respectivement
- gH = {g • h, h ∈ H} et Hg = {h • g, h ∈ H},
c'est-à-dire les ensembles constitués de tous les éléments de la forme g • h (classe à gauche) et de la forme h • g (classe à droite), où h est un élément de H.
Les classes suivant un sous-groupe H forment une partition de G, c'est-à-dire que la réunion de toutes les classes à gauche est égale à G et l'intersection de deux classes à gauche différentes est vide.
L'égalité g1H = g2H a lieu si et seulement si g1−1g2 ∈ H, c'est-à-dire lorsque g1 et g2 diffèrent d'un élément de H. De même pour les classes à droite suivant H. Les classes à gauche et à droite suivant H peuvent être égales, mais ce n'est pas le cas en général. Si, pour tout élément g de G, gH = Hg, alors H est un sous-groupe normal (ou distingué) de G.
Dans D8, les classes à gauche gR relatives au sous-groupe R constitué par les rotations sont : soit R si g est une rotation, soit l'ensemble U = fvR = {fv, fd, fh, fc} colorié en vert sur la table de Cayley donnée plus haut. Le sous-groupe R est distingué car les classes à gauche et à droite sont égales : fvR = U = Rfv, par exemple, cette égalité étant aussi vraie pour tous les éléments autres que fv.
Dans Z, le sous groupe 2Z des nombres pairs définit deux classes : celle des nombres pairs et celle des nombres impairs. Les classes à gauche et à droite dans Z sont toujours égales car ce groupe est commutatif.
Le groupe diédral D6 des symétries d'un triangle équilatéral ABC possède plusieurs sous groupes : il y a trois sous-groupes contenant l'identité et la symétrie par rapport à une hauteur, les sous-groupes de rotation de 120 degrés (sens direct et sens indirect), le sous-groupe contenant l'identité seulement et le groupe diédral lui-même. Certains de ces sous-groupes sont normaux, d'autres non, et cela peut se voir très simplement.
Si H est normal, pour tout g appartenant à D6, g H g −1 = H. Supposons que H soit le sous groupe contenant l'identité e, et la symétrie s par rapport à l'axe vertical (hauteur issue de A). Si g est la rotation de 120 degrés dans le sens direct, les éléments de g H g −1 sont l'identité et la symétrie par rapport à la hauteur issue de B (prendre l'exemple d'un point M proche de B, g −1 fait tourner M de –120 degrés, s envoie M de l'autre côté de l'axe vertical et g ramène M vers B par la rotation de 120 degrés). Autrement dit, g H g −1 est différent de H, mais surtout g H g −1 est semblable à H, mais par rapport à un autre axe. Les deux groupes H et g H g −1 ne diffèrent que par un changement de coordonnée.
Un groupe normal est en quelque sorte indépendant du système de coordonnées. On voit tout de suite que le groupe contenant l'identité et la symétrie par rapport à une droite n'est pas normal, mais que le groupe contenant l'identité, la rotation de 120 degrés et la rotation de 240 degrés l'est : il n'y a pas d'axe privilégié.
Ce genre d'exemple suggère que dans le groupe des matrices orthogonales, le sous-groupe des matrices conservant l'orientation est probablement normal, tandis que le sous-groupe qui conserve un hyperplan particulier ne l'est pas.
Groupe quotient
Lorsqu'un sous-groupe est distingué, l'ensemble des classes qu'il définit forme également un groupe, appelé groupe quotient de G par N et noté G / N.
- G / N = {gN, g ∈ G}
L'opération de ce nouveau groupe est induite par celle de G :
- (gN) • (hN) = (g • h)N
pour tous éléments g et h de G. Cette étude est motivée par l'idée que l'application G → G / N qui, à tout élément g du groupe associe sa classe gN, est un morphisme de groupes. La classe eN = N est l'élément neutre du groupe quotient et le symétrique de gN est (gN)−1 = (g−1)N.
| • | R | U |
|---|---|---|
| R | R | U |
| U | U | R |
| Table du groupe quotient D8 / R. | ||
Les éléments du groupe quotient D8 / R sont R lui-même, qui représente l'élément neutre, et U = fvR. La loi de groupe de ce quotient est représentée dans le tableau ci-contre. Par exemple, U • U = fvR • fvR = (fv • fv)R = R. Le sous-groupe R = {id, r1, r2, r3} et le groupe quotient correspondant sont tous les deux commutatifs, alors que D8 ne l'est pas. L'idée de construire de grands groupes à partir d'autres plus petits est formalisée par la notion de produit semi-direct.

Le quotient et les sous-groupes permettent de décrire tout groupe par sa présentation : chaque groupe est le quotient du groupe libre sur l'ensemble de ses générateurs, quotienté par le sous-groupe des relations. Le groupe diédral D8, par exemple, peut être engendré par deux éléments a et b, où a est l'une des deux rotations d'ordre 4 (par exemple celle d'angle ) et b un retournement quelconque (par exemple celui d'axe vertical). Une présentation de ce groupe est :


Une présentation d'un groupe peut aussi servir à construire le graphe de Cayley, un outil utilisé pour représenter graphiquement les groupes discrets.
Les sous-groupes et groupes quotients sont liés par la relation suivante : un sous-ensemble H de G peut être vu comme une injection H → G, c'est-à-dire que chaque élément de G possède au plus un antécédent par cette fonction. La notion d'application injective est liée avec celle d'application surjective (une application pour laquelle tout élément de l'ensemble d'arrivée admet au moins un antécédent). L'application canonique G → G / N est surjective. Les théorèmes d'isomorphisme permettent d'exhiber des morphismes injectifs, surjectifs et bijectifs « naturels » d'un groupe afin de comprendre sa structure.
Exemples et applications

Les exemples et applications des groupes abondent. Un point de départ est le groupe Z des entiers avec l'addition comme loi, donné en introduction de l'article. Si au lieu de l'addition on considère la multiplication, on obtient des groupes multiplicatifs. Ces groupes sont les prédécesseurs d'importantes constructions en algèbre générale.
Les groupes sont aussi appliqués dans de nombreux autres domaines des mathématiques. Les objets mathématiques sont souvent examinés en leur associant des groupes et en étudiant les propriétés des groupes correspondants. Par exemple, Henri Poincaré a fondé ce qui est maintenant appelé la topologie algébrique en introduisant le groupe fondamental. De par cette connexion, des propriétés topologiques comme les voisinages et la continuité se traduisent en propriétés de groupes. Par exemple, les éléments du groupe fondamental sont représentés par des boucles. La deuxième image à droite montre quelques boucles dans un plan privé d'un point. La boucle bleue est considérée comme nulle et donc sans intérêt, car elle peut être continument (c'est-à-dire sans être « cassée ») déformée en un point. La présence d'un trou empêche la boucle orange d'être continument déformée en un point. Le groupe fondamental du plan dont un point a été ôté s'avère donc infini et cyclique, engendré par la boucle orange (ou toute autre boucle faisant un tour autour du trou).
Dans des applications plus récentes, l'influence a été inversée pour motiver les constructions géométriques par un arrière-plan de théorie des groupes. Dans le même ordre d'idées, la théorie géométrique des groupes emploie des concepts géométriques, par exemple dans l'étude des groupes hyperboliques. D'autres branches appliquant les groupes de manière cruciale incluent la géométrie algébrique et la théorie des nombres.
En plus des applications théoriques précédentes, de nombreuses applications pratiques des groupes existent. La cryptographie repose sur la combinaison de la théorie des groupes avec le savoir algorithmique obtenu par la théorie algorithmique des groupes (en), en particulier l'implémentation dans les groupes finis. Les applications de la théorie des groupes ne sont pas restreintes aux mathématiques, des sciences comme la physique, la chimie et l'informatique bénéficient de ce concept.
Nombres
De nombreux systèmes numériques, comme les nombres entiers et rationnels, bénéficient naturellement d'une structure de groupe. Dans certains cas, l'addition et la multiplication donnent chacune lieu à une structure de groupe. Ces considérations ont donné naissance à des structures algébriques plus élaborées : les anneaux et les corps.
Entiers
Le groupe des nombres entiers Z muni de l'addition, noté (Z, +), a été décrit plus haut. L'ensemble des nombres entiers, muni de la multiplication (Z, ×), ne forme pas un groupe. La loi est bien interne, associative, et il existe un élément neutre (le nombre 1), mais pas d'inverse en général : par exemple, l'équation 3 · b = 1 n'admet pas de solution dans Z. L'inverse de 3 serait 13, qui n'est pas entier, mais rationnel.
Rationnels
Le besoin d'inverses des nombres entiers amène à considérer les fractions ab où a et b sont deux entiers, b étant différent de zéro. Ces fractions d'entiers sont appelées nombres rationnels et l'ensemble qu'elles constituent est noté Q.
L'ensemble des rationnels muni de la multiplication, (Q, ·), ne constitue pas un groupe, car le nombre 0 ne possède pas d'inverse pour la multiplication (il n'existe aucun nombre rationnel x tel que x · 0 = 1).
Cependant, l'ensemble des nombres rationnels non nuls : Q \ {0} = {q ∈ Q, q ≠ 0}, muni de la multiplication, forme un groupe noté (Q \ {0}, ·).
L'ensemble des nombres rationnels (y compris zéro) forme aussi un groupe lorsqu'il est muni de l'addition. L'entrelacement de l'addition et de la multiplication produit une nouvelle structure plus complexe que celle de groupe : les anneaux (Z, par exemple) et, si la division est possible (comme avec Q), les corps commutatifs.
Entiers non nuls, modulo un nombre premier
| × | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 1 | 1 | 2 | 3 | 4 |
| 2 | 2 | 4 | 1 | 3 |
| 3 | 3 | 1 | 4 | 2 |
| 4 | 4 | 3 | 2 | 1 |
| Table de multiplication de Z/5Z privé de 0. | ||||
L'ensemble des classes du groupe quotient de (Z, +) par son sous-groupe pZ engendré par un entier p, noté Z/pZ est particulièrement intéressant lorsque p est un nombre premier.
Pour tout nombre premier p, Z/pZ, muni cette fois de la multiplication (et privé de zéro), est un groupe. Ses éléments sont les entiers non divisibles par p, considérés modulo p, c'est-à-dire que chaque nombre est assimilé au reste de sa division euclidienne par p : deux éléments sont considérés comme équivalents lorsque leur différence est un multiple de p.
Par exemple, si p = 5, il y a exactement 4 éléments : 1 ; 2 ; 3 et 4. Les multiples de 5 sont exclus. 6 et −4 sont considérés comme équivalents à 1. Le produit 4 · 4 = 1 puisque le produit usuel 16 est équivalent à 1, car 5 divise 16 − 1 = 15. On note 16 ≡ 1 (mod 5).
La primalité de p assure que le produit de deux entiers non divisibles par p n'est pas divisible par p, donc la multiplication sur l'ensemble de classes considérés est une loi de composition interne. L'élément neutre est 1 et l'associativité provient de la propriété correspondante sur les entiers relatifs. Enfin, le dernier axiome de groupe nécessite que, pour chaque élément a non divisible par p, il existe un entier b non divisible par p tel que :
- a · b ≡ 1 (mod p), c'est-à-dire p divise la différence a · b − 1.
L'inverse b peut être déterminé en utilisant le théorème de Bachet-Bézout et le fait que le PGCD de a et p est 1. Dans le cas p = 5 ci-dessus, l'inverse de 4 est 4 et l'inverse de 3 est 2, car 3 · 2 = 6 ≡ 1 (mod 5). Ainsi, les axiomes de groupes sont vérifiés. En fait, cet exemple est similaire à (Q\{0}, ·), car il montre que l'ensemble des éléments non nuls, muni de la multiplication, est un groupe, ce qui, conjointement au groupe additif, donne un corps fini noté Fp. Ces groupes sont cruciaux pour la cryptographie à clé publique.
Groupes cycliques

Un groupe cyclique est un groupe dont tous les éléments sont des puissances (quand le groupe est noté additivement, le terme multiple est utilisé) d'un certain élément a. En notation multiplicative, les éléments du groupe sont :
- ..., a−3, a−2, a−1, a0 = e, a, a2, a3, ...,
où a2 signifie a • a, et a−3 désigne a−1 • a−1 • a−1=(a • a • a)−1 etc. Un tel élément a est un générateur, ou élément primitif du groupe.
Un exemple typique est celui des racines ne de l'unité, qui sont les nombres complexes z tels que zn = 1, muni de la multiplication (n désignant un nombre entier strictement positif). Tout groupe cyclique contenant n éléments est isomorphe à ce groupe. La théorie des corps montre que le groupe (Fp,×) est cyclique : pour p = 5, par exemple, 3 est un générateur car 31 = 3, 32 = 9 ≡ 4, 33 ≡ 2 et 34 ≡ 1. Tout groupe cyclique infini est isomorphe au groupe des entiers relatifs (Z, +). Comme ces deux prototypes sont abéliens, tout groupe cyclique est abélien.
Groupes de symétries
Les groupes de symétries sont constitués des symétries d'objets mathématiques donnés, que ces objets soient de nature géométrique, comme le groupe des symétries du carré vu en introduction, ou de nature algébrique, comme les équations polynomiales et leurs solutions. D'un point de vue conceptuel, la théorie des groupes peut être pensée comme l'étude de la symétrie. Les symétries simplifient grandement l'étude des objets géométriques ou analytiques. On dit qu'un groupe opère sur un objet X si chaque élément du groupe peut être associé à une opération sur X de façon que la composition de ces opérations soit compatible avec la loi du groupe. Par exemple, le groupe diédral D8 opère sur le carré.

En chimie, notamment en cristallographie[10], les groupes d'espaces et groupes ponctuels de symétrie décrivent des symétries moléculaires et les symétries de cristaux. Ces symétries sous-tendent le comportement chimique et physique de ces systèmes et la théorie des groupes permet la simplification de l'analyse quantique de ces propriétés. Par exemple, la théorie des groupes est utilisée pour montrer que des transitions d'atomes entre certains niveaux quantiques ne peuvent pas se produire à cause de la symétrie des niveaux[10].
Les groupes ne sont pas seulement utiles pour estimer les implications des symétries dans les molécules, mais ils prédisent aussi, de façon surprenante, que les molécules peuvent parfois changer de symétrie. L’effet Jahn-Teller, connu aussi en tant que « distorsion Jahn-Teller », décrit la distorsion de la géométrie des molécules non linéaires dans certaines situations. Historiquement, cet effet a été proposé dans un théorème publié en 1937 par Hermann Arthur Jahn et Edward Teller, dans lequel ils démontrent que toute molécule non linéaire possédant un niveau électronique fondamental dégénéré subira une distorsion géométrique qui lèvera cette dégénérescence, ce qui aura pour effet de diminuer l’énergie totale de la molécule.
De même, la théorie des groupes aide à prévoir les changements dans les propriétés physiques qui se produisent quand un matériau subit une transition de phase, par exemple, d'une forme cristalline cubique en une forme tétraédrique. Ainsi les matériaux ferroélectriques, dans lesquels le changement d'une phase paraélectrique à une phase ferroélectrique se produit à la température de Curie et est lié à un changement de l'état hautement symétrique paraélectrique à un état ferroélectrique de moindre symétrie, accompagné d'un mode appelé phonon, c'est-à-dire un « paquet élémentaire de vibration » qui s'étend de la fréquence zéro à la transition.
Une telle brisure spontanée de symétrie a trouvé une application en physique des particules élémentaires, où son apparition est reliée à l'apparition de bosons de Goldstone.
 |
 |
 |
-3D-balls.png.webp) |
 |
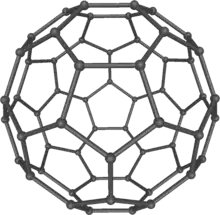
| Le buckminsterfullerène possède une symétrie icosaédrique. |
L'ammoniac, NH3. Son groupe de symétries est d'ordre 6, engendré par une rotation de 120° et une réflexion. | Le Cubane C8H8 est caractérisé par une symétrie octaédrique. |
L'ion complexe Hexaaquacopper(II), [Cu(OH2)6]2+. Comparé à une forme parfaitement symétrique, la molécule est dilatée verticalement d'environ 22 % (effet Jahn-Teller). | Le groupe de triangle (2,3,7), un groupe hyperbolique, opère sur ce pavage du plan hyperbolique. |
Les groupes de symétries finis comme le groupe de Mathieu sont utilisés en théorie des codes, qui est à son tour appliquée à la correction préventive d'erreurs de données transmises et dans les lecteurs de CD. Une autre application est la théorie de Galois différentielle, qui caractérise les fonctions possédant des primitives d'une certaine forme, ce qui donne des critères de théorie des groupes pour déterminer quand certaines équations différentielles se comportent bien. Les propriétés géométriques qui restent stables par une action de groupe sont étudiées en théorie géométrique des invariants (en).
Groupe général linéaire et théorie des représentations

Un groupe de matrices (en) est constitué de matrices et muni de la multiplication matricielle. Le groupe général linéaire GL(n,R) contient toutes les matrices inversibles à n lignes et n colonnes et coefficients réels. Le groupe diédral mentionné ci-dessus peut être vu comme un très petit groupe de matrices. Un autre groupe de matrices très important est le groupe spécial orthogonal SO(n). Il décrit toutes les rotations possibles à n dimensions. Via les angles d'Euler, les matrices de rotation sont utilisées en infographie pour la synthèse d'images.
La théorie des représentations est à la fois une application du concept de groupe et important pour une compréhension plus profonde de ce concept. Elle consiste à étudier un groupe par son action sur d'autres espaces. Une grande catégorie de représentations de groupes est celle des représentations linéaires, lorsque le groupe opère sur un espace vectoriel comme l'espace euclidien à trois dimensions. Une représentation d'un groupe G sur un espace vectoriel réel à n dimensions est simplement un morphisme de groupes
- ρ: G → GL(n, R)
du groupe G vers le groupe général linéaire. De cette façon, l'opération de groupe, qui peut être définie de façon abstraite, est transposée en la multiplication de matrices, ce qui la rend accessible à des calculs explicites.
Étant donné une action de groupe, cela donne des moyens supplémentaires pour étudier l'objet sur lequel le groupe opère. Mais aussi des informations sur le groupe lui-même. Les représentations de groupes sont un principe d'organisation de la théorie des groupes finis, des groupes de Lie, des groupes algébriques et des groupes topologiques, en particulier les groupes compacts ou localement compacts.
Groupes de Galois
Les groupes de Galois ont été développés pour aider à la résolution d'équations polynomiales en identifiant leurs symétries. Par exemple, les solutions de l'équation quadratique ax2 + bx + c = 0 sont données par :

L'échange de « + » et « - » dans l'expression, c'est-à-dire la permutation des deux solutions de l'équation, peut être vu comme une action de groupe très simple. Des formules similaires sont connues pour les équations cubiques et quartiques, mais n'existent pas en général pour les équations polynomiales de degré 5 ou davantage. Les propriétés abstraites des groupes de Galois associés à des polynômes donnent un critère permettant de déterminer si une équation polynomiale est résoluble par radicaux, c'est-à-dire si les solutions peuvent être exprimées à partir des coefficients du polynôme en utilisant seulement l'addition, la multiplication et les racines ne, comme dans la formule ci-dessus.
Le problème peut être traité en utilisant la théorie des corps, en considérant le corps de rupture du polynôme. La théorie de Galois moderne généralise les groupes de Galois évoqués ci-dessus aux extensions de corps et établit, par le théorème fondamental de la théorie de Galois, une relation précise entre les corps et les groupes, soulignant une fois de plus le rôle important des groupes dans les divers champs des mathématiques.
Groupes finis
Un groupe est dit fini s'il possède un nombre fini d'éléments. Le nombre de ses éléments est appelé l'ordre de ce groupe. Les groupes symétriques SN, groupes des permutations de N lettres, sont particulièrement importants. Par exemple, le groupe symétrique sur 3 lettres (en) ABC contient les six permutations des trois lettres : ABC, ACB, BAC, BCA, CAB et CBA. Ces groupes sont importants car tout groupe fini est isomorphe à un sous-groupe d'un groupe symétrique SN, pour une certaine valeur de N (théorème de Cayley). De manière analogue au groupe des symétries du carré vu plus haut, S3 peut être vu comme le groupe des symétries d'un triangle équilatéral.
L'ordre d'un élément a d'un groupe G est le plus petit entier positif n tel que an = e, où an représente

c'est-à-dire la répétition de l'opération • sur n copies de a. Dans un groupe infini, un tel ordre n peut ne pas exister, dans ce cas on dit que l'ordre de a est l'infini. L'ordre d'un élément est égal à l'ordre du groupe cyclique engendré par cet élément.
Des techniques de comptage plus sophistiquées produisent des informations plus précises sur les groupes finis : le théorème de Lagrange indique que, pour un groupe fini G, l'ordre de tous sous-groupe H de G divise l'ordre de G. Les théorèmes de Sylow donnent des réciproques partielles.
Le groupe diédral D8 est fini, d'ordre 8. L'ordre de r1 est 4, de même que l'ordre du sous-groupe R engendré par cette rotation. L'ordre des réflexions fv etc, est 2. Ces ordres divisent 8, comme l'indique le théorème de Lagrange.
Classification des groupes simples finis
La classification des groupes finis mène rapidement à des mathématiques profondes et difficiles. D'après le théorème de Lagrange, les groupes finis d'ordre p, où p est un nombre premier, sont nécessairement cycliques, donc abéliens et isomorphes à Zp. On peut également montrer que les groupes d'ordre p2 sont abéliens. Ce résultat ne se généralise pas à p3, comme le montre le groupe diédral D8 non abélien d'ordre 8 = 23. Un système de calcul formel peut être utilisé pour établir une liste des petits groupes, mais il n'existe aucune classification de tous les groupes finis.
Une étape intermédiaire est la classification des groupes simples finis. Un groupe G non trivial est dit simple si ses seuls sous-groupes normaux sont son sous-groupe trivial (réduit à l'élément neutre) et le groupe G lui-même. Le théorème de Jordan-Hölder désigne les groupes simples comme étant les « briques » utilisées pour construire tous les groupes finis. L'élaboration de la liste des groupes finis simples fut un résultat majeur de la théorie des groupes contemporaine[11]. Richard Borcherds, lauréat de la médaille Fields en 1998, parvint à prouver les conjectures monstrous moonshine, une relation surprenante et profonde entre le plus grand groupe sporadique fini simple (le groupe Monstre) et certaines formes modulaires, qui font partie de l'analyse complexe et de la théorie des cordes, une théorie supposée unifier la description de nombreux phénomènes physiques.
Groupes munis d'une autre structure
De nombreux groupes sont en même temps des exemples d'autres structures mathématiques. Dans le langage de la théorie des catégories, il existe des groupes dans une catégorie, ce qui signifie qu'il existe des objets (c'est-à-dire des exemples d'une autre structure mathématique) accompagnés de transformations (appelées morphismes) qui imitent les axiomes de groupe. Par exemple, chaque groupe est aussi un ensemble, donc un groupe est un objet groupe dans la catégorie des ensembles.
Groupes topologiques

Certains espaces topologiques peuvent être munis d'une loi de groupe. Pour que la loi du groupe et la topologie interagissent correctement, les opérations du groupe doivent être continues, c'est-à-dire que g • h, et g−1 ne doivent pas beaucoup varier si g et h varient peu. De tels groupes sont dits groupes topologiques. Les exemples les plus courants sont le groupe additif des nombres réels, le groupe multiplicatif des réels non nuls et de même, (K, +) et (K \ {0}, ×) pour tout corps topologique K, comme le corps des nombres complexes ou celui des nombres p-adiques. Lorsque — comme dans ces six exemples — le groupe est localement compact, il a une mesure de Haar et peut donc être étudié via l'analyse harmonique. La mesure de Haar offre un formalisme abstrait des intégrales invariantes. L'invariance signifie, dans le cas de (R, +) par exemple :

pour toute constante c. Les groupes de matrices à coefficients dans ces corps relèvent de ce régime, comme les anneaux adèles et les groupes algébriques adéliques (en), qui sont fondamentaux en théorie des nombres. Les groupes de Galois d'extensions de corps infinis comme le groupe de Galois absolu peuvent aussi être équipés d'une topologie, la topologie de Krull, qui est à son tour centrale pour généraliser la connexion entre les corps et les groupes d'extensions de corps infinis esquissée plus haut. Une généralisation avancée de cette idée, adaptée aux besoins de la géométrie algébrique, est le groupe fondamental étale (en).
Groupes de Lie
Les groupes de Lie (du nom de Sophus Lie) sont des groupes qui ont une structure de variété différentiable, c'est-à-dire qui sont des espaces localement semblables à un espace euclidien d'une certaine dimension. Là encore, la structure additionnelle — ici, la structure de variété — doit être compatible avec celle de groupe, c'est-à-dire que les fonctions correspondant à la multiplication et à l'inverse doivent être différentiables.
Un exemple standard est le groupe général linéaire introduit plus haut : il est un sous-ensemble ouvert de l'espace de toutes les matrices carrées à n lignes et n colonnes car défini par l'ensemble des matrices carrées A telles que
- det (A) ≠ 0,
où det désigne le déterminant, qui est une application continue.
Les groupes de Lie sont d'une importance fondamentale en physique : le théorème de Noether exprime l'équivalence qui existe entre les lois de conservation et l'invariance des lois physiques en ce qui concerne les symétries en physique. Les rotations, ainsi que les translations dans l'espace et le temps, sont des symétries de base des lois de la mécanique. Elles peuvent notamment être utilisées pour construire des modèles simples — imposer par exemple un axe de symétrie à une situation conduit généralement à une nette simplification des équations nécessaires à sa description physique. Un autre exemple est la transformation de Lorentz, qui relie les mesures du temps et de la vitesse de deux observateurs en mouvement relatif. Elle peut être déduite par un raisonnement purement théorique sur le groupe des transformations de Galilée de l'espace de Minkowski. Ce dernier sert — en l'absence d'une gravitation significative — à modéliser l'espace-temps en relativité restreinte. Le groupe des isométries de l'espace de Minkowski est appelé groupe de Poincaré. De ce fait, celui-ci joue un rôle pivot en relativité restreinte et, par conséquent, pour la théorie quantique des champs.
Généralisations
| Associativité | Neutre | Symétrique | |
|---|---|---|---|
| Groupe | |||
| Monoïde | |||
| Demi-groupe | |||
| Magma |
En algèbre générale, des structures plus générales sont définies en omettant certains axiomes de la définition des groupes. Par exemple, si la condition que chaque élément possède un symétrique est éliminée, on obtient une structure algébrique appelée monoïde. Les nombres entiers naturels N, munis de l'addition, forment un monoïde, de même que l'ensemble des entiers relatifs non nuls munis de la multiplication (Z \ {0}, ·) vu plus haut. Il existe une méthode générale pour ajouter de façon formelle des symétriques aux éléments d'un monoïde commutatif, de façon analogue à celle dont (Q \ {0}, ·) est dérivé de (Z \ {0}, ·). Le groupe ainsi obtenu est appelé groupe de Grothendieck du monoïde.
Le tableau ci-contre donne différentes structures généralisant successivement celle de groupe. En retour, en partant de la plus générale, le magma, on peut définir le demi-groupe comme un magma associatif, le monoïde comme un demi-groupe admettant un élément neutre et le groupe lui-même comme un monoïde dont chaque élément possède un symétrique[12].
Un groupoïde est semblable à un groupe, si ce n'est que la loi a • b n'est pas définie pour tous les éléments a et b. Les groupoïdes apparaissent dans l'étude de formes plus compliquées de symétries, souvent dans les structures topologiques ou analytiques, comme le groupoïde fondamental.
Décidabilité
La théorie des groupes du premier ordre est indécidable[13] : il n'existe pas d'algorithme qui prend en entrée une formule du premier ordre et qui dit si la formule est vraie dans tous les groupes. Wanda Szmielew (de), étudiante de Tarski, a démontré que la théorie du premier ordre des groupes abéliens est décidable[14].
Notes et références
- Henri Poincaré, Science et Méthode, Paris, Flammarion, (lire en ligne), p. 30-31.
- « Lorsqu'on aborde un chapitre quelconque de la théorie des groupes, [...] l'on ne peut échapper à l'impression d'atteindre un domaine profond et central des mathématiques et de la logique. Cela est si vrai qu'il est impossible de faire ni physique, ni géométrie, sans se servir, de façon plus ou moins consciente, du concept de groupe. », Edmond Bauer, « Introduction à la théorie des groupes et à ses applications en physique quantique », Annales de l'IHP, vol. 4, no 1, , p. 1-170 (lire en ligne).
- Pour l'année 2005, le journal Mathematical Reviews a répertorié 3 224 articles de recherche portant sur la théorie des groupes et ses généralisations.
- La classification complète fut annoncée en 1983, mais quelques lacunes furent identifiées dans la preuve. Pour plus d'informations, voir la classification des groupes simples finis.
- Voir par exemple, parmi de nombreux manuels d'enseignement et avec des différences de présentation minimes E. Ramis, C. Deschamps et J. Odoux, Mathématiques spéciales, t. 1 : Algèbre, Paris, Masson, , p. 58 ou Georges Gras et Marie-Nicole Gras, Algèbre fondamentale. Arithmétique : niveau L3 et M1, Ellipses, p. 13-14.
- A. Dahan-Dalmedico et J. Peiffer, Une histoire des mathématiques : Routes et dédales, [détail des éditions].
- Bruno Belhoste, Cauchy, un mathématicien légitimiste au XIXe siècle [détail des éditions].
- (de) Walther von Dyck, « Gruppentheoretische Studien », Mathematische Annalen, vol. Band 20, , p. 1-44 (lire en ligne)
- Daniel Perrin, Cours d'algèbre [détail des éditions], ch. 1 : « L'intérêt des sous-groupes distingués est de permettre le « dévissage » des groupes. »
- Bauer 1933.
- Voir par exemple Lluis Puig, « La classification des groupes finis simples : bref aperçu et quelques conséquences internes », Séminaire Bourbaki, no 24, 1981-1982 (lire en ligne).
- Christian Valéry Nguembou Tagne, Du Point à l'Espace : Introduction formelle à la géométrie euclidienne, BoD, , 264 p. (ISBN 978-2-322-11931-8, lire en ligne), p. 43.
- (en) Alfred Tarski, Undecidable Theories, .
- (en) Wanda Szmielew, « Elementary properties of Abelian groups », Fund. Math., vol. 41, no 2, , p. 203-271 (lire en ligne).
Voir aussi
Articles connexes
- Catégorie des groupes
- Groupe abélien de type fini
- Groupe ax + b
- Groupe de Klein
- Groupe symétrique
- Groupe ponctuel de symétrie
- Groupe simple
- Groupe résoluble
- Groupe sporadique
- Liste des petits groupes
- Ordre d'un sous-groupe, ordre d'un élément
- Partie génératrice d'un groupe
- Produit direct
- Produit semi-direct
- Réseau
Bibliographie
- Jean Fresnel, Groupes, Paris, Hermann, 2001 (ISBN 978-2-7056-1448-5)
- Roger Godement, Introduction à la théorie des groupes de Lie, Berlin, Springer, , 305 p. (ISBN 3-540-20034-7, lire en ligne)
- Serge Lang, Algèbre [détail des éditions]
- Felix Ulmer, Théorie des groupes - Cours et exercices, Ellipses, 2012