Groupe de Lie
En mathématiques, un groupe de Lie est un groupe qui est aussi une variété différentielle. D'une part, un groupe est une structure algébrique munie d'une opération binaire, typiquement une multiplication et son inverse la division, ou alors une addition et son inverse la soustraction. D'autre part, une variété est un espace qui localement ressemble à un espace euclidien. Ici, on s'intéresse à un ensemble qui est à la fois un groupe et une variété : nous pouvons multiplier les éléments entre eux, calculer l'inverse d'un élément. Si ces opérations de groupe — multiplication et inversion — sont continues, on obtient un groupe continu. Si en plus, ces opérations de groupes sont différentiables, il s'agit d'un groupe de Lie. Les groupes de Lie sont nommés ainsi en l'honneur du mathématicien norvégien Sophus Lie, qui les introduisit afin d'étudier certaines propriétés des équations différentielles.
La théorie de groupes de Lie décrit la symétrie continue (en) en mathématiques. En physique théorique (par exemple dans la théorie des quarks), son importance s'est affirmée au cours du XXe siècle.
Exemples simples

Plan
Le plan, c'est-à-dire l'espace euclidien de dimension 2 peut être considéré comme un groupe de Lie. C'est une variété (localement, l'espace ressemble à l'espace euclidien de dimension 2) et un groupe. Comme le montre la figure à droite, l'opération de groupe est l'addition de deux points (que l'on considère alors comme des vecteurs). L'inverse d'un vecteur (x, y) est le vecteur (-x, -y). Ces deux opérations sont différentiables.
Cercle
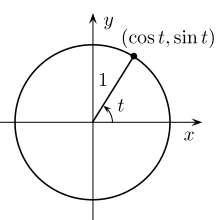
Un cercle, par exemple le cercle unité, est un groupe de Lie dans le sens suivant. C'est une variété : localement, le cercle ressemble à une droite, i.e. un espace euclidien de dimension 1. D'autre part, il s'agit d'un groupe. En effet, chaque point est paramétré par un angle t avec l'axe des abscisses. L'opération d'addition de deux points correspond à additionner les angles. L'inverse d'un point d'angle t avec l'axe des abscisses, est le point d'angle -t avec l'axe des abscisses.
Histoire
Sophus Lie lui-même considérait que la théorie des « groupes continus » (au sens actuel de groupes topologiques) était née lors de l'hiver 1873-1874, mais le biographe Hawkins suggère que la théorie est née des recherches effectuées par Lie durant les quatre années précédentes (de 1869 à 1873)[1].
Une partie des idées initiales de Lie furent développées en collaboration avec Felix Klein, qu'il rencontrait quotidiennement durant les jours d'octobre des années 1869 à 1872, à Berlin d'abord, puis Paris, Göttingen et Erlangen.
Les résultats de Lie furent publiés dans des journaux norvégiens lors de la décennie 1870, et son œuvre gagna rapidement le reste de l'Europe. En 1884, un jeune mathématicien allemand, Friedrich Engel, travailla avec Lie à la création d'un exposé systématique de la théorie des groupes continus, lequel fut publié en trois volumes sous le titre Theorie der Transformationsgruppen, en 1888, 1890 et 1893.
Un développement important de la théorie fut ensuite réalisé par Wilhelm Killing. La généralisation par Élie Cartan mena à la classification des algèbres de Lie semi-simples et aux travaux de Hermann Weyl sur les représentations des groupes de Lie compacts.
La théorie des groupes de Lie fut exposée méthodiquement dans le langage mathématique moderne par Claude Chevalley.
Définitions
Une structure algébrique G est un groupe de Lie réel (respectivement complexe) lorsque :
- G est une variété différentielle réelle (respectivement complexe) ;
- G, munie de deux fonctions G×G → G (multiplication) et G → G (inversion), est un groupe (c'est-à-dire possède une loi associative, non nécessairement commutative, avec un élément neutre, chaque élément ayant un symétrique) ;
- les applications de multiplication et d'inversion sont analytiques réelles (respectivement complexes).
Il est également possible de définir un groupe de Lie comme une variété différentielle munie d'opérations de groupe seulement différentiables, ou même seulement continues. Cette définition est équivalente à la précédente et est une interprétation du cinquième problème de Hilbert.
La dimension d'un groupe de Lie est définie comme sa dimension en tant que variété.
Il existe également une notion analogue de groupe de Lie p-adique lorsque la variété différentielle sous-jacente est remplacée par un ensemble analytique p-adique. Ce sera le cas, par exemple, du groupe des points p-adiques d'un groupe algébrique.
Propriétés
Types de groupes de Lie
Les groupes de Lie sont classables selon leurs propriétés algébriques (abélien, simple (en), semi-simple, résoluble, nilpotent), ou bien topologiques (connexe, simplement connexe, compact).
Ils sont également usuellement classés en quatre types, représentés dans le tableau d'exemples plus bas :
- groupes de Lie réels, basés sur le corps commutatif ℝ ;
- groupes de Lie complexes, basés sur le corps commutatif ℂ ;
- groupes de Lie quaternioniques, basés sur le corps non commutatif des quaternions ℍ ;
- groupes de Lie exceptionnels.
Algèbre de Lie associée à un groupe de Lie
Il est possible d'associer naturellement à tout groupe de Lie G une algèbre de Lie. Il existe deux manières équivalentes d'introduire cette algèbre de Lie. L'une consiste à introduire un espace de champs de vecteurs sur G, la seconde consiste à munir l'espace tangent en l'élément neutre d'un crochet de Lie, dérivant de l'expression locale de la loi interne de G.
Comme algèbre de champs de vecteurs
G désigne un groupe de Lie réel ou complexe de dimension n. Pour g un élément de G, l'application est un difféomorphisme de la variété réelle ou complexe sous-jacente à G. Un champ de vecteurs X sur G est dit invariant à gauche lorsque pour tout couple d'élément g et h de G, on a : (où on note la valeur du champ de vecteurs X au point a).



Pour toute variété différentielle réelle ou complexe M, l'espace vectoriel réel ou complexe des champs de vecteurs sur M, noté I(M), est muni d'une structure naturelle d'algèbre de Lie réelle ou complexe, dont le crochet est le crochet de champs de vecteurs. La naturalité signifie exactement que tout morphisme f:M → N entre variétés induit un morphisme d'algèbres de Lie f* : I(N) → I(M). En particulier, pour M = N = G, on dispose d'automorphismes (Lg)* de l'algèbre de Lie I(G). L'ensemble des points fixes communs à tous ces automorphismes (Lg)* est une sous-algèbre de Lie de I(G), notée . Ses éléments sont les champs de vecteurs invariants à gauche sur G.

Comme espace tangent
Soit TeG l'espace tangent en e à G, e désignant l'élément neutre de G. L'application (où Xe est la valeur de X en l'élément neutre) est un isomorphisme linéaire. La structure d'algèbre de Lie de se transporte donc, via cet isomorphisme, en une structure d'algèbre de Lie sur l'espace vectoriel TeG.

Cette structure peut se définir directement. Supposons donnée f une carte locale de G en l'élément neutre e avec f(e)=0, alors, le produit du groupe de Lie lu dans la carte locale f est au second ordre :

où B est une application bilinéaire et antisymétrique. La structure d'algèbre de Lie sur TeG est donnée par
![[X,Y]=B(X,Y).](https://img.franco.wiki/i/9d54a93fd8a29c5f14eb59e88974b76c51e06980.svg)
Application exponentielle
Dans la première présentation, tout vecteur X de est par définition un champ de vecteurs invariant à gauche sur G. L'invariance à gauche implique que son flot est globalement défini. L'exponentielle de X est définie comme l'image au temps 1 de l'élément neutre e de G. Plus précisément, il existe une unique fonction c : ℝ → G dont la dérivée est donnée par et telle que c(0) = e.
![c'(t)=X[c(t)]](https://img.franco.wiki/i/24bb8ecfc74d0f3c93c5e05c04a5ebe2a15fe698.svg)
Elle possède la propriété remarquable suivante : pour tous s et t.

Si l'on note, pour v = Xe, , une reparamétrisation incluant la variable t montre que .


On peut alors vérifier

Cette fonction est également appelée fonction exponentielle et relie l'algèbre de Lie au groupe de Lie G. Elle définit un difféomorphisme entre un voisinage de 0 dans et un voisinage de e dans G. Toutefois, en général, l'application exponentielle n'est pas surjective, ni injective.
Un sous-groupe à un paramètre de G est une application différentiable c : ℝ → G vérifiant l'identité (*) ci-dessus. À tout sous-groupe à un paramètre c est associé un unique élément X de vérifiant : .
Classification algébrique des groupes de Lie
Plusieurs groupes de Lie peuvent partager la même algèbre de Lie associée. Cependant, à toute algèbre de Lie correspond un groupe de Lie simplement connexe G, unique à isomorphisme près. De plus cet isomorphisme est uniquement déterminé par l'isomorphisme d'algèbres de Lie associé. Tout groupe de Lie connexe dont l'algèbre de Lie est isomorphe à se réalise comme quotient de G par un sous-groupe normal discret.
Un groupe de Lie connexe est dit simple, semi-simple, résoluble, nilpotent ou abélien si son algèbre de Lie associée possède la propriété de même nom. En particulier, la classification des algèbres de Lie semi-simples donne une classification des groupes de Lie simplement connexes et semi-simples.
Homomorphismes et isomorphismes
Morphisme de groupe de Lie
Si G et H sont deux groupes de Lie (tous deux réels ou complexes), alors un morphisme de groupes de Lie f : G → H est un morphisme de groupes qui est également une fonction analytique (il suffit en fait que f soit continue).
La composition de deux morphismes de groupes de Lie est un morphisme de groupes de Lie et la classe de tous les groupes de Lie est une catégorie. Deux groupes de Lie sont dits isomorphes s'il existe entre eux un morphisme bijectif dont la réciproque est également un morphisme.
Théorème de Cartan-von Neumann (en) : tout sous-groupe fermé d'un groupe de Lie possède une unique structure différentielle pour laquelle le morphisme d'inclusion est un plongement[2].
Morphisme d'algèbre de Lie
Soient G et H deux groupes de Lie, et f : G → H un morphisme de groupes de Lie. Alors il existe un unique morphisme d'algèbre de Lie : de l'algèbre de Lie associée à G dans celle associée à H, telle que, pour tout champ de vecteurs X invariant à gauche dans G, on ait, pour tout t :


De plus, si f est un isomorphisme, aussi[3]. Vue comme application de TeG dans TeH, n'est autre que la différentielle de f calculée en l'élément neutre de G.

Exemples
Groupes de Lie réels (groupes de Lie classiques)
Dans le tableau ci-dessous, la notion A* désigne la matrice adjointe d'une matrice A.
| Groupe de Lie | Description | Propriétés | Algèbre de Lie | Description | Dimension |
|---|---|---|---|---|---|
| ℝn | Espace euclidien muni de l'addition | Abélien ; simplement connexe, non compact | ℝn | Le crochet de Lie est nul | n |
| ℝ* | Nombres réels non nuls munis de la multiplication | Abélien ; non connexe, non compact | ℝ | Le crochet de Lie est nul | 1 |
| ℝ*+ | Nombres réels strictement positifs munis de la multiplication | Abélien ; simplement connexe, non compact | ℝ | Le crochet de Lie est nul | 1 |
| Nombres complexes de module 1 munis de la multiplication | Abélien ; connexe, non simplement connexe, compact | ℝ | Le crochet de Lie est nul | 1 | |
| Groupe général linéaire : matrices réelles n×n inversibles | Non connexe, non compact | Matrices n×n, le crochet de Lie étant le commutateur | n² | ||
| Matrices réelles n×n à déterminant positif | Simplement connexe, non compact | Matrices n×n, le crochet de Lie étant le commutateur | n² | ||
| Groupe spécial linéaire : matrices réelles de déterminant 1 | Simplement connexe, non compact si n > 1 | Matrices carrées de trace nulle, le crochet de Lie étant le commutateur | n² – 1 | ||
| Groupe orthogonal : matrices orthogonales réelles | Non connexe, compact | Matrices antisymétriques carrées réelles, le crochet de Lie étant le commutateur ; est isomorphe à et ℝ3 muni du produit vectoriel | n(n - 1)/2 | ||
| Groupe spécial orthogonal : matrices orthogonales réelles de déterminant 1 | Simple pour n = 3 et n ≥ 5 ; semi-simple pour n = 4 ; connexe, compact, non simplement connexe pour n ≥ 2 | Matrices antisymétriques carrées réelles, le crochet de Lie étant le commutateur | n(n - 1)/2 | ||
| Groupe Spin | Simple pour n = 3 et n ≥ 5 ; semi-simple pour n = 4 ; simplement connexe, compact | Matrices antisymétriques carrées réelles, le crochet de Lie étant le commutateur | n(n - 1)/2 | ||
| Groupe symplectique : matrices symplectiques réelles | Simple ; non compact | Matrices réelles satisfaisant JA + ATJ = 0 où J est la matrice antisymétrique standard | n(2n + 1) | ||
| Groupe unitaire : matrices unitaires n×n complexes | Non simplement connexe, compact ; isomorphe à S1 pour n = 1 | Matrices carrées complexes A vérifiant A = –A*, le crochet de Lie étant le commutateur | n² | ||
| Groupe spécial unitaire : matrices unitaires complexes n×n de déterminant 1 | Simple pour n ≥ 2 ; simplement connexe, compact | Matrices carrées complexes de traces nulles A vérifiant A = –A*, le crochet de Lie étant le commutateur | n² – 1 | ||
| Quaternions de module 1 munis de la multiplication, également noté | Simple ; simplement connexe, compact ; topologiquement une sphère, isomorphe à et | Quaternions de partie réelle nulle, le crochet de Lie étant le produit vectoriel ; Isomorphe aux vecteurs réels de dimension 3, également isomorphe à , est un revêtement double de | 3 | ||
| Groupe compact symplectique : matrices unitaires n×n quaternioniques | Simple ; compact, simplement connexe | Matrices quaternioniques carrées A vérifiant A = –A*, le crochet de Lie étant le commutateur | n(2n + 1) |



























Groupes de Lie complexes
Les dimensions sont données sur ℂ. (Tout groupe ou algèbre de Lie complexe peut être vu comme un groupe ou une algèbre de Lie réel de dimension double.)
| Groupe de Lie | Description | Propriétés | Algèbre de Lie | Description | Dimension |
|---|---|---|---|---|---|
| ℂn | Espace euclidien muni de l'addition | Abélien ; simplement connexe, non compact | ℂn | Le crochet de Lie est nul | n |
| ℂ* | Nombres complexes non nuls munis de la multiplication | Abélien ; non simplement connexe, non compact | ℂ | Le crochet de Lie est nul | 1 |
| Groupe général linéaire : matrices complexes n×n inversibles | Connexe, non simplement connexe, non compact ; isomorphe à ℂ* pour n = 1 | Matrices n×n, le crochet de Lie étant le commutateur | n² | ||
| Groupe spécial linéaire : matrices complexes de déterminant 1 | Simple ; simplement connexe, non compact pour n ≥ 2 | Matrices carrées de trace nulle, le crochet de Lie étant le commutateur | (n² – 1) | ||
| Groupe orthogonal : matrices orthogonales complexes | Non connexe, non compact pour n ≥ 2 | Matrices antisymétriques carrées complexes, le crochet de Lie étant le commutateur | n(n – 1)/2 | ||
| Groupe spécial orthogonal : matrices orthogonales complexes de déterminant 1 | Simple pour n = 3 et n ≥ 5 ; semi-simple pour n = 4 ; non simplement connexe, non compact pour n ≥ 2 | Matrices antisymétriques carrées complexes, le crochet de Lie étant le commutateur | n(n – 1)/2 | ||
| Groupe symplectique : matrices symplectiques complexes | Simple ; non compact | Matrices complexes satisfaisant JA + ATJ = 0 où J est la matrice antisymétrique standard | n(2n + 1) |









Groupes de Lie quaternioniens
Les dimensions sont données sur ℍ.
| Groupe de Lie | Description | Propriétés | Algèbre de Lie | Description | Dimension |
|---|---|---|---|---|---|
| ℍ* | Quaternions non nuls munis de la multiplication | Simplement connexe, non compact | ℍ | Quaternions, le crochet de Lie étant le commutateur | 1 |
Notes et références
- Hawkins 2000, chap. 1 (« The Geometrical Origins of Lie's Theory »), p. 1.
- Élie Cartan, « La théorie des groupes finis et continus et l'Analysis Situs », Mémorial Sc. Math., vol. XLII, , p. 1-61, § 26.
- Jacques Lafontaine, Introduction aux variétés différentielles, Les Ulis, EDP Sciences, , 369 p. (ISBN 978-2-7598-0572-3), p. 152
Voir aussi
Articles connexes
- Action de groupe de Lie (en)
- Action hamiltonienne (en)
- Application moment
- Atlas of Lie groups and representations (en)
- Espace homogène
- Formule de Baker-Campbell-Hausdorff
- Groupe algébrique (l'analogue algébrique des groupes de Lie ; ce sont des variétés algébriques munies d'une structure de groupe)
- Groupe classique
- Groupe formel (en)
- Représentation d'un groupe de Lie
- Représentation coadjointe
- Sous-groupe compact maximal
- Théorème d'Ado
Lien externe
(en) « Atlas of Lie Groups and Representations », sur NSF, American Institute of Mathematics (en)
Bibliographie
- N. Bourbaki, Éléments de mathématique : Groupes et algèbres de Lie, Springer,
- Roger Godement, Introduction à la théorie des groupes de Lie, Springer, , 305 p. (ISBN 978-3-540-20034-5, lire en ligne)
- (en) Thomas Hawkins, Emergence of the Theory of Lie Groups : An Essay in the History of Mathematics, 1869-1926, Springer, , 566 p. (ISBN 978-0-387-98963-1, lire en ligne)
- (en) Sigurdur Helgason (de), Differential Geometry, Lie Groups, and Symmetric Spaces, Academic Press, (lire en ligne), rééd. AMS 2001 (aperçu sur Google Livres), 2012
- (en) Anthony W. Knapp, Lie Groups Beyond an Introduction, Springer, (1re éd. 1996) (lire en ligne)
- (en) Ivan Kolář, Peter W. Michor (de) et Jan Slovák, Natural Operations in Differential Geometry, Springer, (lire en ligne)
- (en) John M. Lee, Introduction to Smooth Manifolds, Springer, coll. « GTM » (no 218), (lire en ligne)
- Rached Mneimné et Frédéric Testard, Introduction à la théorie des groupes de Lie classiques [détail des éditions]
- (en) Claude Chevalley, Theory of Lie groups I, PUP,
- José María Almira, José Luis Guijarro et Martine Joulia (Trad.), L'exploitation de la symétrie : Lie, Barcelone, RBA Coleccionables, , 159 p. (ISBN 978-84-473-9887-4)