Produit vectoriel
En mathématiques, et plus précisément en géométrie, le produit vectoriel est une opération vectorielle effectuée dans les espaces euclidiens orientés de dimension 3[N 1] - [N 2] - [N 3]. Le formalisme utilisé actuellement est apparu en 1881 dans un manuel d'analyse vectorielle écrit par Josiah Willard Gibbs pour ses étudiants en physique. Les travaux de Hermann Günther Grassmann et William Rowan Hamilton sont à l'origine du produit vectoriel défini par Gibbs[1] - [2].
Histoire
Résumé
La mise en place de la notion de produit vectoriel prend son essor dans la deuxième moitié du XIXe siècle, même si Lagrange utilise en 1773 des grandeurs assimilables aux composantes du produit vectoriel de deux vecteurs. Mais cette utilisation reste limitée à un usage ponctuel[3]. En 1843, Hamilton invente les quaternions qui permettent d'introduire naturellement le produit vectoriel. Indépendamment et à la même période (1844), Grassmann définit dans Die lineale Ausdehnungslehre ein neuer Zweig der Mathematik un « produit géométrique » à partir de considérations géométriques ; mais il ne parvient pas à définir clairement un produit vectoriel. Puis Grassmann lit Hamilton et s'inspire de ses travaux pour publier en 1862 une deuxième version de son traité qui est nettement plus claire[4]. De même, Hamilton lit les travaux de Grassmann, les commente et les apprécie[5]. Plus tard Maxwell commence à utiliser la théorie des quaternions pour l'appliquer à la physique. Après Maxwell, Clifford modifie profondément le formalisme de ce qui devenait l'analyse vectorielle. Il s'intéresse aux travaux de Grassmann et Hamilton avec une nette préférence pour le premier[2]. Dans son ouvrage Elements of Dynamic (1878), Clifford définit le produit vectoriel de deux vecteurs comme un vecteur orthogonal aux deux vecteurs et dont la grandeur est égale à l'aire du parallélogramme formé par les deux vecteurs[6]. En 1881, Gibbs publia Elements of Vector Analysis Arranged for the Use of Students of Physics s'inspirant des travaux déjà réalisés, notamment ceux de Clifford et Maxwell. Si les physiciens se sont empressés d'utiliser le formalisme de Gibbs, celui-ci ne fut accepté en mathématiques que bien plus tard, et après plusieurs modifications.
Anecdote
Peter Guthrie Tait, dans la préface de la troisième édition de son traité sur les quaternions, qualifie le nouveau formalisme créé par Gibbs de « monstre hermaphrodite, composé des notations de Hamilton et Grassmann »[7].
Notation
Plusieurs notations sont en concurrence pour le produit vectoriel :
- En France, le produit vectoriel de u et de v est noté u ∧ v, où le symbole ∧ se lit vectoriel (wedge en anglais). Cette notation a été introduite par Cesare Burali-Forti et Roberto Marcolongo en 1908[8]. Son inconvénient est d'entrer en conflit avec la notation du produit extérieur ;
- Dans la littérature anglophone et allemande (ainsi qu'au Canada francophone, en Suisse, et parfois en Belgique), le produit vectoriel est noté u × v. Cette notation est due à Josiah Willard Gibbs[7]. Son inconvénient est d'induire une confusion éventuelle avec le produit des réels et le produit cartésien, mais ces produits ne portent pas sur des objets de même nature[N 4] ;
- Une troisième notation, privilégiée par exemple par Arnold, est l'utilisation des crochets de Lie : [u , v][N 5].
Dans cet article, la première convention sera utilisée (avec ou sans flèches sur les vecteurs).
Définition
Soit E un espace vectoriel euclidien orienté de dimension 3. Par le choix d'une base orthonormée, E peut être identifié avec l'espace R3, mais cette identification n'est pas obligatoire pour définir le produit vectoriel.
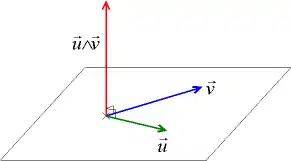
D'un point de vue géométrique,
le produit vectoriel de deux vecteurs et de E non colinéaires se définit comme l'unique vecteur tel que :
- le vecteur est orthogonal aux deux vecteurs donnés ;
- ;
- la base est de sens direct,
et le produit vectoriel de deux vecteurs colinéaires est nul par définition.





En particulier :
- deux vecteurs sont colinéaires si (et seulement si) leur produit vectoriel est nul ;
- deux vecteurs sont orthogonaux si et seulement si la norme de leur produit vectoriel est égale au produit de leurs normes ;
- le module du produit vectoriel est égal à l'aire du parallélogramme défini par les deux vecteurs et .
La notion d'orientation peut ici être appréhendée de manière élémentaire en utilisant la règle de la main droite : le pouce, l'index et le majeur écartés en un trièdre indiquent respectivement le sens de , de et de . Cette méthode, utilisée dans l'enseignement secondaire, n'est pas totalement satisfaisante, mais reste une approche adaptée aux applications, en particulier en physique (voir l'article orientation (mathématiques) pour une approche plus théorique).
Définition par le produit mixte
Une seconde définition[N 6] utilise la théorie des déterminants et la notion de produit mixte comme point de départ. Le produit mixte de trois vecteurs u, v, w, noté [u, v, w], est le déterminant de ces trois vecteurs dans une base orthonormée directe (BOND) quelconque. La formule de changement de base montre que ce déterminant est indépendant du choix de la base directe ; géométriquement il est égal au volume orienté du parallélépipède appuyé sur les vecteurs u, v, w.
Le produit vectoriel de deux vecteurs u et v est l'unique vecteur u ∧ v tel que, pour tout w, on a :
![{\displaystyle [u,v,w]=(u\wedge v)\cdot w.}](https://img.franco.wiki/i/a17d0cc5c0d7ba26cbb409723367fab6500b8eec.svg)
Le produit vectoriel s'interprète comme les variations du volume orienté d'un parallélépipède en fonction du troisième côté.
Avec une telle définition, il est possible de définir, dans un espace vectoriel orienté de dimension n + 1, le produit vectoriel de n vecteurs.
Cette définition se reformule en recourant au formalisme des espaces euclidiens. Le produit vectoriel u ∧ v est alors le vecteur dual de l’application linéaire w : ⟼ [u, v, w], donné par le théorème de représentation de Riesz.
Calcul en composantes

Le choix arbitraire d'une base orthonormée directe donne une identification de E et de . Notons les coordonnées u = (u1, u2, u3) et v = (v1, v2, v3).

Leur produit vectoriel est donné par[N 7] - [9] :

Cette troisième définition, puisqu'elle est équivalente aux deux précédentes, est indépendante, malgré les apparences, du choix de la base orthonormée directe dans laquelle on calcule les coordonnées.
Propriétés
Propriétés algébriques
- Le produit vectoriel est un produit distributif, anticommutatif :
- Distributivité par rapport à l'addition :
- ,
- Compatibilité avec la multiplication par un scalaire :
- .
- Distributivité par rapport à l'addition :


Ces deux propriétés font du produit vectoriel une application bilinéaire, et confèrent à une structure d'algèbre.
- Anticommutativité, ou antisymétrie:
- .

Ces propriétés découlent immédiatement de la définition du produit vectoriel par le produit mixte et des propriétés algébriques du déterminant.
- Il n'est pas associatif — c'est-à-dire qu'en général u ∧ (v ∧ w) n'est pas égal à (u ∧ v) ∧ w — et plus précisément, il vérifie les égalités du double produit vectoriel :
- .




![{\begin{aligned}(x\cdot ((u\cdot w)v-(u\cdot v)w))&=(x\cdot v)(u\cdot w)-(x\cdot w)(u\cdot v)\\&=\operatorname {Gram}(x,u;v,w)\\&=((x\wedge u)\cdot (v\wedge w))\\&=[x,u,v\wedge w]\\&=(x\cdot (u\wedge (v\wedge w))).\end{aligned}}](https://img.franco.wiki/i/a8dea2fb92167845e92c4c971332b8f2a17cff5b.svg)
- Il vérifie par conséquent l'identité de Jacobi, ce qui en fait un crochet de Lie :
.

- En partant et de ,


on obtient l'égalité :

ce qui donne, en passant aux coordonnées, l'identité de Lagrange :

Applications
- Les premières propriétés algébriques ci-dessus (bilinéarité et formule du double produit vectoriel) fournissent une solution au problème de la division vectorielle u ∧ x = v, où l'inconnue est le vecteur x et les données sont les deux vecteurs u et v, en supposant u non nul et orthogonal à v (sans quoi la résolution est instantanée).
En effet, de u ∧ (v ∧ u) = ║u║2v, on déduit que x0 = (v ∧ u)/║u║2 est une solution. Or le noyau de l'application linéaire x ↦ u ∧ x est la droite vectorielle Ru, donc l'ensemble des solutions de cette équation linéaire est x0 + Ru.
- En développant le quadruple produit vectoriel de deux façons, on obtient une relation de dépendance linéaire entre les quatre vecteurs a, b, c, d : .

![{\displaystyle [b,c,d]a-[c,d,a]b+[d,a,b]c-[a,b,c]d=0}](https://img.franco.wiki/i/90022b30dc99a9ea6fd2e942b7e5e2218ddf31eb.svg)
Invariance par isométries
Le produit vectoriel est invariant par l'action des isométries vectorielles directes. Plus exactement, pour tous vecteurs u et v de E et pour toute rotation f de E, on a :
![f\left[u\wedge v\right]=f(u)\wedge f(v).](https://img.franco.wiki/i/9e7db0a64b8cbfbb0f2e7af39d24768d1ec41b9a.svg)
Cette identité peut être prouvée différemment suivant l'approche adoptée :
Définition géométrique : L'identité est immédiate avec la première définition, car f préserve l'orthogonalité, l'orientation et les longueurs.
Produit mixte : L'isomorphisme linéaire f laisse invariant le produit mixte de trois vecteurs. En effet, le produit mixte de f(u), f(v), f(w) peut être calculé dans l'image par f de la base orthonormée directe dans laquelle le produit mixte de u, v et w est calculé. De fait, l'identité précédente s'obtient immédiatement :
![(f(u)\wedge f(v))\cdot f(w)=[f(u),f(v),f(w)]=[u,v,w]=(u\wedge v)\cdot w\,=f(u\wedge v)\cdot f(w)](https://img.franco.wiki/i/a6c6f7e83e4dcf16ad408c768469e4600af514e9.svg)
où f(w) parcourt tout l'espace vectoriel quand w le parcourt puisque f est une bijection, d'où l'égalité souhaitée.
Définitions alternatives
Comme produit de Lie
Toute isométrie directe de R3 est une rotation vectorielle. L'ensemble des isométries directes forme un groupe de Lie classique noté SO(3) (autrement dit, un sous-groupe fermé de GL3(R)). Son algèbre de Lie, notée so(3) est la sous-algèbre de Lie de gl3(R) définie comme l'espace tangent de SO(3) en l'identité. Un calcul direct montre qu'il est l'espace des matrices antisymétriques de taille 3. Cet espace est a fortiori stable par le crochet de Lie.
Toute matrice antisymétrique A de taille 3 s'écrit de manière unique En identifiant A et le vecteur , on définit un isomorphisme linéaire entre so(3) et R3. Le crochet de Lie se transporte via cet isomorphisme, et R3 hérite d'une structure d'algèbre de Lie. Le crochet [u, v] de deux vecteurs est précisément le produit vectoriel de u et de v.


En effet, si et , leur crochet se calcule en introduisant les matrices antisymétriques correspondantes et :




![{\displaystyle [\mathrm {U} ,\mathrm {V} ]=\mathrm {U} \mathrm {V} -\mathrm {V} \mathrm {U} ={\begin{pmatrix}0&v_{1}u_{2}-u_{1}v_{2}&v_{1}u_{3}-u_{1}v_{3}\\u_{1}v_{2}-v_{1}u_{2}&0&v_{2}u_{3}-u_{2}v_{3}\\u_{1}v_{3}-v_{1}u_{3}&u_{2}v_{3}-v_{2}u_{3}&0\end{pmatrix}}}](https://img.franco.wiki/i/e27586eee83c1d2128dabbbd388c4a65bbbd156d.svg)
Le vecteur correspondant, à savoir , a donc pour coordonnées . Cette approche redéfinit donc le produit vectoriel.
![{\displaystyle [u,v]}](https://img.franco.wiki/i/c790b8b85a510362484e22edb7d03d54656ee4e1.svg)

Si on suit cette approche, il est possible de prouver directement l'invariance du produit vectoriel par les isométries directes. En tant qu'algèbres de Lie, so(3) a été identifié à R3. L'action (linéaire) de SO3(R) sur R3 s'identifie à l'action par conjugaison sur so(3). SO3(R) opère donc par automorphisme d'algèbres de Lie. Autrement dit, l'identité ci-dessus est vérifiée.
Comme produit de quaternions imaginaires
Il est possible de retrouver produit vectoriel et produit scalaire à partir du produit de deux quaternions purs. Pour rappel, le corps (non commutatif) des quaternions H est l'unique extension de R de dimension 4. Sa base canonique est (1, i, j, k) où le sous-espace engendré par i, j et k forme l'espace des quaternions purs, canoniquement identifié avec R3. Ces éléments vérifient : ; . Si q1 = a1i + b1j + c1k et q2 = a2i + b2j + c2k, le produit q1q2 se calcule immédiatement : La partie réelle est au signe près le produit scalaire de q1 et de q2 ; la partie imaginaire est un quaternion pur qui correspond au produit vectoriel, après identification avec R3.



Cette coïncidence trouve ses explications dans le paramétrage du groupe SO(3) par les quaternions unitaires.



Il est de nouveau possible de justifier l'invariance par isométrie. Toute isométrie de l'espace des quaternions imaginaires s'écrit comme la conjugaison par un quaternion unitaire. Si q est un quaternion unitaire, et q1, q2 sont des quaternions imaginaires, il suffit de constater :
![\left[qq_{1}\overline {q}\right].\left[qq_{2}\overline {q}\right]=q(q_{1}q_{2})\overline {q}](https://img.franco.wiki/i/7310641598ca4f4a877a0fad84a860e4ac98b318.svg)
pour en déduire l'invariance par isométrie du produit vectoriel.
Par le produit tensoriel
Soient deux vecteurs u et v dont les 3 coordonnées dans une base orthonormée directe sont notées respectivement et . On peut définir le tenseur dont les 9 coordonnées sont




ce qui, en notation tensorielle, s'écrit simplement .

Ce tenseur peut se décomposer en la demi-somme de deux tenseurs, l'un complètement symétrique qui a 6 coordonnées indépendantes données par , et l'autre complètement anti-symétrique qui a 3 coordonnées indépendantes données par .




On peut associer et le vecteur z dont les coordonnées sont :


ce qui, à l'aide du symbole de Levi-Civita peut s'écrire


Selon la convention de sommation d'Einstein, on somme sur i et sur j dans la formule ci-dessus. Par exemple pour k = 3 (i et j variant de 1 à 3), .

Comme cette égalité est conservée lors d'un changement de base orthonormée directe, z est bien le produit vectoriel de u et v.
Remarque : Dans l'écriture ci-dessus, désigne le produit extérieur des vecteurs u et v. Avec la notation pour le produit vectoriel on peut écrire , etc. ce qui ne pose aucun problème. Avec la notation française pour le produit vectoriel, on obtient ce qui peut amener des confusions.




Dans le cas général, la base n'est pas nécessairement orthonormée directe. Comme le produit extérieur est défini de manière intrinsèque (définition tensorielle), l'expression de ses coordonnées est inchangée : . Mais il n'en est pas de même pour le produit vectoriel. Pour généraliser au cas d'une base quelconque, (toujours en dimension 3) il faut introduire les coordonnées covariantes et contravariantes ainsi que le tenseur de Levi-Civita

On obtient alors ou de manière équivalente


Caractérisation du produit vectoriel en dimension 3
Théorème : si une application bilinéaire notée de dans E, E espace vectoriel réel de dimension 3, vérifie pour tout u,v,w :

- Règle d'échange :
- Formule du double produit :


Alors il existe une orientation de E telle que est le produit vectoriel de E.
Étapes successives de la démonstration :
- a. On montre en partant de et utilisant 1. puis 2.
- b. On en déduit directement (égalité dans l'inégalité de Cauchy-Schwarz) puis en calculant .
- c. Soient deux vecteurs normés orthogonaux, , alors en utilisant 1. et a. on montre que est orthonormale, puis que et .
- d. En exprimant u et v dans cette base, décrétée directe, on calcule les coordonnées de , qui montrent alors que est bien « le » produit vectoriel.









Autre caractérisation en dimension quelconque a priori
On appelle produit vectoriel sur un espace euclidien V une application bilinéaire notée[N 8] ×, allant de V × V vers V,, ayant les propriétés suivantes[10] - [11] :

- (orthogonalité),

et :
- (relation entre les normes),

où (x·y) est le produit scalaire et |x| est la norme du vecteur x. Une formulation équivalente, utilisant l'angle θ entre les vecteurs[12], est[13] :

ce qui est l'aire du parallélogramme (dans le plan de x et y) ayant les deux vecteurs pour côtés[14]. Il est également possible de montrer que l'expression suivante est équivalente aux deux précédentes[15] :
- .

On démontre alors qu'un produit vectoriel non trivial ne peut exister qu'en dimensions trois et sept[13] ; de plus, en dimension trois, ce produit vectoriel est unique au signe près.
Définitions ambigües ou/et obsolètes
La définition mathématique du produit vectoriel nécessite la notion « d'orientation de l'espace », expression qui, même de nos jours (2021), est assez peu utilisée en dehors du champ mathématique[16]. Les mathématiciens définissent l'orientation en dimensions quelconques sur des objets très généraux appelés variétés d'une manière nécessairement très abstraite. Même dans le cas simple des espaces vectoriels, la définition la plus usuelle fait intervenir la notion de forme volume (elle ne fait pas appel aux bases) et est assez peu concrète[17]. Les physiciens, entre autres, préfèrent utiliser « l'orientation d'une base », notion plus facilement accessible (en dimension 3) à l'aide des trois premiers doigts de la main : règle de la main droite ou règle de la main gauche selon le cas. En anglais, on utilise l'expression imagée "handedness" (en).
Définition obsolète
En physique, la définition moderne du produit vectoriel est conforme à la définition mathématique. Mais il n'en a pas toujours été ainsi. Par exemple, chez Landau, p. 28, on trouve :
« Lorsque l'on renverse par symétrie le système de coordonnées, c'est-à-dire quand on change les signes des trois coordonnées, les composantes d'un vecteur ordinaire changent également de signe. De tels vecteurs sont dits polaires. Les composantes d'un vecteur pouvant être représenté comme le produit vectoriel de deux vecteurs polaires ne changent pas de signe lors d'un renversement. De tels vecteurs sont dits axiaux. […] Un vecteur axial est un pseudo-vecteur, dual d'un certain tenseur antisymétrique. Ainsi, si , on a où . »



En physique, la définition moderne du produit vectoriel de deux vecteurs ne fait pas intervenir le fait qu'ils soient polaires ou axiaux et est indépendante de tout système de coordonnées : c'est donc un tenseur. Plus précisément c'est un tenseur de rang 1, c'est-à-dire un vecteur. Alors que pour Landau, le produit vectoriel de deux vecteurs polaires (et d'une manière plus générale, tout vecteur axial) est un pseudo-tenseur de rang 1, c'est-à-dire un pseudovecteur. La définition de Landau est donc obsolète mais elle a le grand mérite d'être clairement obsolète.
Définitions ambigües
« On sait qu'un vecteur axial change de sens quand on change l'orientation des axes (on le vérifie aisément par exemple sur le produit vectoriel de deux vecteurs polaires)[18]. »
À première vue, cette définition semble être analogue à celle de Landau. Mais le dessin qui l'accompagne permet de mieux la comprendre. L'auteur utilise un repère orthonormal dans lequel, par définition, les formules usuelles sont correctes[19]. Il explique ensuite que par convention on le représente sous la forme d'un repère orienté à droite (il ne le précise pas mais cela signifie que l'espace est orienté à droite) mais que l'on pourrait tout aussi bien le représenter orienté à gauche (l'espace serait alors orienté à gauche). Le changement de signe du produit vectoriel vient donc du changement d'orientation de l'espace, ce qui est conforme à sa définition.
La citation précédente n'est explicitée que grâce au dessin qui l'accompagne ; seule elle est ambigüe. D'autres auteurs sont sans doute dans le même cas et il faut être prudent lorsque l'on extrait une phrase de son contexte. Par exemple
« Or, par définition, le produit vectoriel de deux vecteurs et est un vecteur [] tel que le trièdre soit de même sens que le trièdre des axes coordonnées[20] »






Faut-il interpréter cette citation comme celle ci-dessus ? Par la suite, l'auteur précise sa pensée et en fait il est dans le même esprit que Landau.
Réconciliation ?
Il apparait donc, comme le dit Jean Sivardière, que « deux définitions, non équivalentes, du produit vectoriel se rencontrent dans la littérature[21] ». Est-il possible de concilier ces deux approches ?
A priori, cela est impossible. On ne peut pas affirmer d'un côté que le produit vectoriel est un vecteur (la définition est indépendante de tout repère) et prétendre de l'autre qu'un changement de base seul peut le changer en son opposé : cela est une contradiction pure et simple. Il faut que les choses soient claires : le produit vectoriel de deux vecteur polaires est un vecteur axial mais ce n'est pas un pseudo-tenseur. En effet
- lorsque l'on change l'orientation du repère, un pseudo-tenseur est changé en son opposé tandis que le produit vectoriel est invariant.
- lorsque l'on change l'orientation de l'espace, un pseudo-tenseur est invariant tandis que le produit vectoriel est changé en son opposé.
Certes, lorsque l'on change les deux en même temps, produit vectoriel et pseudo-tenseur sont changés en leur opposé mais cela ne fait que masquer leurs différences.
Certains commentateurs, refusant de voir cette incompatibilité, ont eu l'idée de redéfinir la notion de "renversement des axes" : un renversement des axes serait toujours accompagné implicitement par un renversement de l'orientation de l'espace. Ainsi, le changement de signe du produit vectoriel serait conforme à la définition.
L'idée est intéressante mais elle est inapplicable en ce qui concerne les citations des grands auteurs. Car même si cela pourrait convenir à certains, pour d'autres ce serait une trahison de leur pensée ; seule une analyse plus précise du contexte peut éventuellement permettre de savoir quelle définition du produit vectoriel l'auteur a choisie.
Applications
Mécanique
On définit l'opérateur rotationnel comme suit : En mécanique du solide, c'est une opération très employée notamment dans la relation de Varignon qui lie les deux champs vectoriels d'un torseur. D'autre part, les équations de Maxwell sur l'électromagnétisme s'expriment à travers l'opérateur rotationnel, ainsi que les équations de la mécanique des fluides, notamment celles de Navier-Stokes.

Le moment d'une force est défini comme le produit vectoriel de cette force par le vecteur reliant son point d'application A au pivot P considéré : C'est une notion primordiale en mécanique du solide.



Équation de plan dans l'espace
Soient A, B et C, trois points non alignés de l'espace, grâce auxquels on peut former le plan (ABC).
Alors est un vecteur normal non nul à (ABC).

Les coordonnées de dans une base orthonormée fournissent donc les trois premiers coefficients d'une équation cartésienne de (ABC) : ax + by + cz + d = 0 dans un repère orthonormé associé à cette base.


Géométrie métrique
Soit ABCD un parallélogramme, c'est-à-dire qu'on a la relation : .Comme indiqué plus haut dans la définition, l'aire de ce parallélogramme est égale à la norme du produit vectoriel des deux vecteurs sur lesquels il s'appuie : .


Notes et références
Notes
- Tous les espaces vectoriels euclidiens orientés de dimension 3 sont deux à deux isomorphes ; l'isomorphisme est une isométrie bien définie à composition près par une rotation.
- Il est en fait possible de définir une opération ayant des propriétés analogues dans des espaces de dimension 7 ; voir « Produit vectoriel en dimension 7 ».
- On peut aussi définir le produit vectoriel de n-1 vecteurs dans un espace vectoriel euclidien orienté de dimension n.
- Un autre inconvénient est que le produit vectoriel n'est ni associatif, ni commutatif, mais c'est aussi le cas des « produits » dans les algèbres non associatives.
- Voir section Définition #Comme produit de Lie.
- L'équivalence entre cette définition et la précédente est démontrée, par exemple, .
- Pour une démonstration, voir par exemple .
- La notation francophone usuelle du produit vectoriel en dimension 3 est , mais il ne semble pas y avoir de mention du cas général dans la littérature

Références
- Crowe 1994.
- Jean-Paul Collette, Histoire des mathématiques, t. 2, Vuibert, 1979 (ISBN 0-7767-0164-9), p. 244.
- Joseph-Louis Lagrange, « Solutions analytiques de quelques problèmes sur les pyramides triangulaires », Nouveaux mémoires de l'Académie royale des sciences et Belles-Lettres, , réimprimé dans Serret, Œuvres de Lagrange, vol. 3, Gauthier-Villars, (lire en ligne), p. 661-692
- Jean Dieudonné (dir.), Abrégé d'histoire des mathématiques 1700-1900 [détail des éditions], 1986, p. 107.
- Crowe 1994, p. 85.
- (en) William Clifford, Elements of Dynamic : An Introduction to the Study of Motion and Rest in Solid and Fluid Bodies, MacMillian and Co (Londres), , p. 95
- Cajori 1993, p. 134 et 136.
- Cajori 1993, p. 138.
- « Produit vectoriel »
- (en) WS Massey, « Cross products of vectors in higher dimensional Euclidean spaces », The American Mathematical Monthly, Mathematical Association of America, vol. 90, no 10, , p. 697–701 (DOI 10.2307/2323537, lire en ligne)
- Massey (1993) et (en) Robert B Brown et Alfred Gray, « Vector cross products », Commentarii Mathematici Helvetici, Birkhäuser Basel, vol. 42, , p. 222–236 (DOI 10.1007/BF02564418, lire en ligne) demandent que l'application soit bilinéaire.
- La définition de l'angle dans un espace de dimension n est généralement donnée à l'aide du produit scalaire, comme valant . Par conséquent, et en appliquant le théorème de Pythagore à la relation entre les normes, , sin θ étant toujours positif dans cet intervalle. Voir (en) Francis Begnaud Hildebrand, Methods of applied mathematics, Courier Dover Publications, , Reprint of Prentice-Hall 1965 2nd éd., 362 p., poche (ISBN 978-0-486-67002-7, lire en ligne), p. 24
- (en) Pertti Lounesto, Clifford algebras and spinors, Cambridge, UK, Cambridge University Press, , 2e éd., 338 p., poche (ISBN 978-0-521-00551-7, LCCN 2001025396, lire en ligne), p. 96-97.
- (en) M. G. Kendall, A Course in the Geometry of N Dimensions, Courier Dover Publications, , 63 p., poche (ISBN 978-0-486-43927-3, LCCN 2004047769, lire en ligne), p. 19
- (en) Z.K. Silagadze, Multi-dimensional vector product, , « math.RA/0204357 », texte en accès libre, sur arXiv..
- « The third edition [2006] of this highly acclaimed undergraduate textbook is suitable for teaching all the mathematics ever likely to be needed for an undergraduate course in any of the physical sciences ». Bien que cette préface d'un livre de Riley soit sans aucun doute justifiée, il n'est pas question "d'orientation de l'espace" dans la définition (p.222) du produit vectoriel.
- Voir, par exemple ici,
- Arzeliès, p. 178.
- Les mathématiciens diraient repère orthonormal direct, c'est-à-dire de même orientation que l'espace. Si l'espace est orienté à droite, "direct" à la même signification en mathématiques et en physique. Si l'espace est orienté à gauche, les physiciens n'ont pas de mot pour désigner un repère direct au sens mathématique. Ce n'est pas bien grave car, en physique, l'espace est toujours orienté à droite. C'est tellement acquis que, même dans les ouvrages les plus sérieux (Riley, par exemple), cela n'est pas précisé.
- Berthelot, p. 52.
- Sivardière, p. 1239. La "littérature" en question est nécessairement non mathématique car en 1988 le produit vectoriel est mathématiquement parfaitement défini.


Ouvrages cités
- (en) Florian Cajori, A History of Mathematical Notations [détail des éditions], 1993
- (en) Michael J. Crowe, A History of Vector Analysis (en) : The Evolution of the Idea of a Vectorial System, Dover, , 2e éd. (1re éd. 1985), 270 p. (ISBN 0-486-67910-1, lire en ligne)
- André Berthelot, Les développements récents relatifs à la symétrie droite-gauche en physique, Paris, J.-B. Baillière et fils, coll. « L'information scientifique » (no 2), , p. 47-62
- Henri Arzeliès, Electricité macroscopique et relativiste, Paris, Gauthiers-Villard,
- Lev Landau et Evgueni Lifchitz (trad. Edouard Gloukhian), Théorie du champ, Moscou, Mir,
- (en) K. F. Riley, M. P. Hobson et S. J. Bence, Mathematical Methods for Physics and Engineering, Cambridge, Cambridge University Press, , 3e éd., 1333 p. (ISBN 978-0-521-86153-3).
- Jean Sivardière, Les grandeurs physiques axiales, coll. « Bulletin de l'Union des Physiciens » (no 709), , p. 1239-1261
- Théodore Vogel, Sur l’utilisation des pseudo-tenseurs en physique, t. 18, n°2, Paris, coll. « Le Journal de Physique et Le Radium », (DOI 10.1051/jphysrad:0195700180208100, HAL jpa-00235630, lire en ligne), p. 81-84
Voir aussi
Articles connexes
Bibliographie
- Marcel Berger, Géométrie [détail des éditions]
- (en) L. L. Boyle et P. S. C. Matthews, On the nature of axial tensors, vol. 5 issue S5, Wiley, coll. « International Journal of Quantum Chemistry », , 1re éd. (DOI 10.1002/qua.560050866), p. 579-590.
Lien externe
www.isima.fr/~leborgne/IsimathMeca/Produitvectoriel.pdf. "Produit vectoriel, pseudo-produit vectoriel, et endomorphismes antisymétriques". 9 pages.
QCM Prod, un programme python gratuit pour s'entraîner aux produits vectoriels.