Rosetta (sonde spatiale)
Rosetta est une mission spatiale de l'Agence spatiale européenne (ASE/ESA) dont l'objectif principal est de recueillir des données sur la composition du noyau de la comète 67P/Tchourioumov-Guérassimenko (surnommée « Tchouri »[alpha 1]) et sur son comportement à l'approche du Soleil. La proportion de matière organique contenue dans ce noyau s'est avérée s'élever à 40 %[1]. La sonde spatiale, d'une masse de trois tonnes, s'est placée en orbite autour de la comète puis, après une période d'observation de plusieurs mois, a envoyé, le , un petit atterrisseur, Philae, se poser sur sa surface pour analyser, in situ, la composition de son sol et sa structure. Rosetta constitue un projet phare pour l'ESA, qui y a investi plus d'un milliard d'euros. Le comité scientifique européen a décidé sa construction en 1993, après l'abandon d'un projet commun avec la NASA, avec l'objectif d'améliorer notre connaissance du processus de formation du Système solaire, dont les comètes constituent des vestiges.
| Organisation | Agence spatiale européenne (ESA) |
|---|---|
| Programme | Horizon 2000 |
| Domaine | Étude d'une comète (67P/Tchourioumov-Guérassimenko) |
| Statut | Mission achevée |
| Lancement | (9 h 14 UTC) |
| Lanceur | Ariane 5G+ |
| Fin de mission | (11 h 19 UTC) |
| Identifiant COSPAR | 2004-006A |
| Site | ESA - Rosetta |
| Masse au lancement | 3 000 kg |
|---|
| Orbite | Héliocentrique |
|---|---|
| Atterrissage |
| ALICE | Spectromètre imageur ultraviolet |
|---|---|
| CONSERT | Radio sondage |
| COSIMA | Spectromètre de masse |
| GIADA | Analyse de la poussière |
| MIDAS | Analyse de la poussière |
| MIRO | Mesure de la température, eau… |
| OSIRIS | Caméra |
| ROSINA | Spectromètre de masse |
| RPC | Mesure du plasma |
| RSI | Radio science |
| VIRTIS | Spectromètre imageur |

Rosetta est la sixième sonde spatiale à observer une comète à faible distance, mais elle est la première à se placer en orbite autour de celle-ci et à poser un atterrisseur sur son noyau. La mission représente à plusieurs titres un défi technique. La distance entre la Terre et la comète nécessite que la sonde soit autonome durant les phases critiques. L'atterrisseur doit pouvoir réussir à se poser sur un noyau cométaire dont la constitution et le comportement sont inconnus. Enfin, la sonde doit survivre, au niveau thermique et énergétique, aux grandes variations d'amplitude de l'éclairage solaire imposées par sa trajectoire.
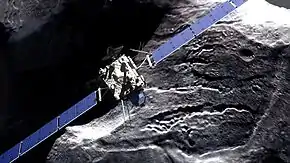
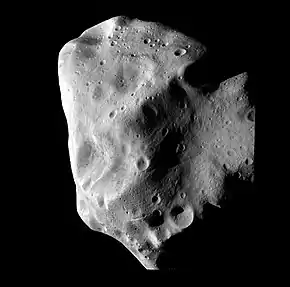
En 2003, une défaillance du lanceur force le report du départ d'un an et l'abandon de l'objectif initial, la comète 46P/Wirtanen. Rosetta est finalement lancée par une fusée Ariane 5 G+ le (9 h 14 UTC)[2] en direction de la comète 67P/Tchourioumov-Guérassimenko. Pour se placer sur une orbite identique à celle de la comète, la sonde spatiale a recours à quatre reprises à l'assistance gravitationnelle de la Terre et de Mars. Pendant son périple, la sonde spatiale survole les astéroïdes Šteins en 2008 et Lutèce le , dont l'étude constitue un objectif scientifique secondaire de la mission. Rosetta est alors mise en sommeil, pendant 31 mois, afin de réduire la consommation d'énergie durant la phase de sa trajectoire où elle se trouve le plus loin du Soleil. La sonde spatiale est réactivée en puis se place sur une orbite identique à celle de la comète, à moins de 100 kilomètres de celle-ci. Le , la sonde spatiale commence les manœuvres devant la mener à son orbite finale autour de Tchourioumov-Guérassimenko, puis largue le le petit atterrisseur Philae, qui recueille des données pendant 3 jours. La mission de l'orbiteur se poursuit autour de la comète, qui atteint son pic d'activité au moment de son passage au plus près du Soleil, le . L'agence spatiale met fin à la mission de Rosetta le , en posant l'engin sur le sol de la comète. Bien avant son achèvement, la sonde spatiale a largement atteint ses objectifs, et elle a donné lieu à de nombreuses découvertes inédites sur la structure et la composition de la comète.
Contexte

Historique des missions spatiales d'étude des comètes
Les scientifiques sont d'avis que l'étude des comètes peut fournir des indices importants sur le processus de formation et évolution du Système solaire. Les comètes sont étudiées au XXe siècle à l'aide de télescopes munis de spectromètres, qui fournissent des indices sur leur composition. Toutefois, seule une mission spatiale in situ peut permettre de connaître de manière suffisamment précise la nature de ces corps célestes. C'est le passage de la comète de Halley, en 1986, qui occasionne la première vague de missions spatiales vers les comètes. Alors que la NASA, qui fait face à de graves problèmes financiers, doit renoncer à développer une mission spatiale, l'ESA construit la sonde Giotto, qui survolera Halley, mais également la comète 26P/Grigg-Skjellerup (1996). La sonde européenne permet l'expérimentation de plusieurs techniques novatrices, notamment le passage à faible distance du noyau d'une comète. Elle est à l'origine de découvertes scientifiques importantes, comme la présence de composés organiques dans le noyau. L'étude des comètes depuis l'espace devient l'un des rares domaines de l'exploration spatiale où l'Agence spatiale européenne devance son homologue américaine, la NASA. La comète de Halley fait également l'objet d'études lors de son passage de 1986 : d'autres sondes spatiales, dont ce n'est parfois pas la mission principale, examinent la comète à plus ou moins grande distance, soit les sondes japonaises Sakigake et Suisei ainsi que les sondes soviétiques Vega 1 et Vega 2.

Au cours des deux décennies suivantes, la NASA envoie plusieurs missions spatiales destinées à l'étude des comètes. Les caractéristiques de ces missions sont très différentes[3] :
- Deep Space 1 survole la comète 19P/Borrelly en 2001 ;
- Stardust, lancée en 1999, passe à proximité de 81P/Wild (comète Wild 2) en 2004 et recueille des particules provenant de la queue de la comète. Une capsule contenant les échantillons recueillis atterrit sur la Terre en 2006. La sonde effectue également, en 2011, un survol de la comète Tempel 1, qui a été percutée par Deep Impact, afin d'étudier son évolution depuis le précédent survol ;
- la sonde spatiale CONTOUR, lancée en 2002, devait survoler les comètes 2P/Encke et 73P/Schwassmann-Wachmann, mais elle est victime d'une défaillance du moteur qui devait l'injecter sur sa trajectoire interplanétaire ;
- Deep Impact, lancée en 2005, est contemporaine de Rosetta. Elle largue, en 2005, un impacteur de 350 kilogrammes sur la comète de 9P/Tempel (Tempel 1), soulevant plusieurs milliers de tonnes de poussière et de glace : l'analyse du noyau de la comète par des instruments embarqués et des télescopes spatiaux permet d'en déterminer la composition.
Sélection comme mission « pierre angulaire » du programme Horizon 2000
Après le succès de la mission Giotto, la communauté scientifique internationale propose en 1991 le lancement d'une mission dédiée aux comètes, dont un des objectifs est de ramener sur Terre un échantillon de noyau cométaire. En , les ministres des pays membres de l'ESA entérinent à Rome le premier plan scientifique à long terme de l'Agence spatiale européenne baptisé Horizon 2000. Celui-ci prévoit notamment le lancement d'ici l'an 2000 de quatre missions ambitieuses, dites « pierres angulaires », dont une mission de retour d'échantillon d'une comète[4]. Mais le coût de cette mission, estimé à 800 millions de dollars, est trop important pour le budget dont dispose l'agence européenne.
Le projet conjoint NASA / ESA avorté
Dans les années 1980, la NASA envisage également un projet analogue baptisé CNSR (Comet Nucleus Sample Return), qui doit être lancé par une fusée Titan IV. Les deux agences décident, au cours de réunions de travail qui ont lieu en , de regrouper leurs moyens pour développer une mission commune baptisée Rosetta. Ce nom fait référence à la pierre de Rosette qui permit à Jean-François Champollion de déchiffrer en 1822 l'égyptien hiéroglyphique. La sonde spatiale doit utiliser la nouvelle génération Mark II de la plateforme des sondes spatiales Mariner en cours de conception au centre spatial JPL. L'agence américaine fournit également les RTG et le lanceur tandis que l'ESA développe l'atterrisseur, le système de prélèvement d'échantillon du sol de la comète ainsi que la capsule ramenant celui-ci sur Terre. L'objectif est initialement la comète 73P/Schwassmann-Wachmann 3 puis, après la décision de reporter la date de lancement à 2003, la comète 67P/Tchourioumov-Guérassimenko. Le lanceur Titan devait placer Rosetta sur une orbite héliocentrique. Grâce à une manœuvre d'assistance gravitationnelle lors d'un survol de la Terre deux ans après le lancement, la sonde spatiale devait réaliser un rendez-vous avec la comète alors que celle-ci se trouvait à son aphélie au niveau de l'orbite de la planète Jupiter. Après une phase d'observation de 100 jours pour évaluer les caractéristiques de la comète et déterminer un site d'atterrissage propice, l'atterrisseur devait se poser en utilisant un radar altimètre et un radar Doppler. L'atterrisseur disposait d'une pelle pour ramasser des échantillons ainsi que d'une foreuse d'une puissance de 100 watts capable de prélever une carotte du sol à 3 mètres de profondeur. Une fois les échantillons placés dans la capsule, un étage développé par la NASA devait placer celle-ci sur une trajectoire de retour vers la Terre[5].
L'annulation par le Congrès américain en 1992 de la mission CRAF, justification première du développement de la plateforme Mariner Mark II, jette un doute sur la volonté de la NASA de poursuivre le projet. De son côté, l'Agence spatiale européenne est en butte à des difficultés financières liées à la réunification de l'Allemagne et au coût annoncé de la navette spatiale Hermes[5]. Après avoir étudié sa faisabilité, l'ESA décide de développer une mission moins ambitieuse, compatible avec ses capacités financières et techniques de l'agence, en abandonnant toute idée de partenariat avec la NASA. Le retour d'échantillon est abandonné mais la phase d'observation in situ de la comète peut être ainsi prolongée, ce qui permet d'étudier l'évolution du noyau à une distance du Soleil comprise entre 1 et 3 U.A.[6].
Redéfinition de la mission
L'Agence spatiale européenne, contrairement à son homologue américaine, ne maîtrise pas la filière de production des RTG chargés de fournir l'énergie dans la version initiale de la sonde spatiale. Rosetta, dans sa nouvelle configuration, doit donc avoir recours à des panneaux solaires qui ne produisent plus qu'un vingtième de leur puissance (par rapport à l'orbite terrestre) lorsque la trajectoire de la sonde spatiale se trouve à son point le plus éloigné du Soleil. Heureusement, la technologie des cellules solaires, qui a fortement progressé, permet de fournir suffisamment d'énergie pour que la sonde spatiale puisse survivre à cette distance du Soleil. Dans les premières esquisses de la mission refondue, les atterrisseurs mis en œuvre sont de conception très simple : entièrement passifs, ils exécutent un programme préétabli et ont une durée de vie limitée par la capacité de leurs batteries. Dans la version finale, Rosetta doit emporter deux atterrisseurs : ROLAND (Rosetta Lander) développé par un consortium européen dirigé par l'Institut Max Planck et l'agence spatiale allemande (DLR), et Champollion, développé conjointement par l'agence spatiale française, le CNES et la NASA. Plusieurs objectifs potentiels sont sélectionnés, il s'agit de comètes qui peuvent être atteintes au bout de 8 à 9 ans en utilisant l'assistance gravitationnelle de Vénus puis de la Terre ou de Mars. La mission inclut également le survol de deux astéroïdes. La mission est validée dans cette configuration en par l'Agence spatiale européenne. Son coût est évalué à 770 M€ en incluant le lanceur et les opérations en vol. L'ESA ne finance toutefois pas les atterrisseurs, qui relèvent du budget des agences spatiales nationales[7].
Développement
Dix-huit mois après le début des études, la NASA renonce pour des raisons financières et de programmation à sa participation à Champollion dont le développement est alors abandonné par l'agence spatiale française. Certains des instruments scientifiques de Champollion sont incorporés dans l'atterrisseur ROLAND auquel le CNES s'associe. De son côté le centre JPL de la NASA développe un projet parallèle de retour d'échantillon de comète, baptisé Deep Space 4 (en) qui comporte un atterrisseur embarquant les instruments de Champollion. Mais après trois ans d'étude, ce projet, jugé trop coûteux, est abandonné à son tour laissant le champ libre à la mission européenne. Le développement de l'orbiteur Rosetta est confié à la société allemande Daimler-Chrysler (devenue en 2014 Airbus Defence and Space) qui dirige un regroupement d'industriels européens : le Royaume-Uni fournit la plateforme, les industriels français l'avionique et l'Italie réalise l'assemblage et les tests. Le développement de l'atterrisseur est coordonné par l'Agence spatiale allemande, la DLR, avec des contributions significatives des agences spatiales et des institutions scientifiques de France, Italie, Hongrie, Royaume-Uni, Finlande, Autriche et Irlande. L'ESA décide finalement de financer 50 % des coûts de développement de l'atterrisseur évalués à 200 millions €[8]. Celui-ci est rebaptisé Philae (qui peut être orthographié Philaé) en référence à l'obélisque de Philæ qui fournit les clés permettant de compléter le déchiffrage de Champollion. En effet, les scientifiques espèrent que les informations collectées par la mission seront décisives pour combler les lacunes dans les connaissances de l'histoire du Système solaire[9]. La sonde spatiale est construite dans une salle blanche respectant les règles de la COSPAR pour éviter toute contamination de la comète[10].
Report du lancement et changement d'objectif
L'objectif initial de la sonde spatiale Rosetta est l'étude de la comète Wirtanen tandis que l'observation des astéroïdes (140) Siwa et (4979) Otawara qui doivent être survolés durant la traversée de la ceinture des astéroïdes par la sonde spatiale, constituent des objectifs secondaires[11]. Le lancement est prévu en , mais l'échec du vol 157 de la fusée Ariane 5 le cloue au sol pour plus d'un an ce lanceur qui avait été retenu pour placer en orbite la sonde. La fenêtre de tir permettant d'atteindre la cible est relativement courte. Il est encore possible d'atteindre la comète en en utilisant le lanceur russe Proton[12]. Mais l'ESA choisit finalement d'utiliser le lanceur Ariane 5, ce qui nécessite de trouver une autre destination pour la sonde spatiale[13].
La seule cible alternative satisfaisant les différentes contraintes de la mission est la comète 67P/Tchourioumov-Guerassimenko, accessible en avec un lanceur de type Ariane 5 G+ et en avec un lanceur de type Ariane 5 ECA ou Proton. Une étude de faisabilité est réalisée par le CNES, qui doit valider le déroulement de l'atterrissage dans ce nouveau contexte, et par le Laboratoire d'astronomie spatiale du CNRS à l'aide du télescope spatial Hubble : elle permet de déterminer que le noyau de cette comète est 30 fois plus massif que celui de Wirtanen, ce qui rend la mission de l'atterrisseur plus complexe mais néanmoins réalisable[14]. Après 3 mois d'investigations, le , le comité des programmes scientifiques de l'ESA approuve le nouvel objectif[15]. Le rendez-vous avec la comète, prévu initialement en 2011, est repoussé à 2014, malgré un report du lancement de seulement un an. Cet allongement découle de la trajectoire plus complexe que doit suivre la sonde pour parvenir jusqu'à son nouvel objectif. En attendant le lancement, la sonde spatiale est stockée sur la base de lancement de Kourou dans une salle blanche. Le logiciel de vol et certains instruments font l'objet d'une mise à jour tandis que les antennes et les panneaux solaires sont démontés de manière provisoire. Plusieurs modifications sont effectuées pour prendre en compte les changements apportés à la mission. Une nouvelle trajectoire est calculée qui fait passer la sonde spatiale plus près du Soleil, nécessitant l'ajout de protections thermiques. La gravité bien supérieure de la nouvelle comète a comme conséquence une vitesse d'atterrissage de Philae trois fois supérieure : pour éviter que l'atterrisseur ne bascule au moment de sa prise de contact avec le sol, un dispositif interne destiné à réduire l'inclinaison est ajouté. Le report et les modifications apportées à l'atterrisseur entraînent un surcoût de 100 millions d’euros. Le coût total de la mission, y compris le lancement et les opérations en vol, est évalué à 1,3 milliard d’euros dont 250 millions d’euros financés par la France via sa participation aux projets de l'Agence spatiale européenne versée par l'agence spatiale nationale, le CNES[16] - [17].
Enjeux de la mission
Principales caractéristiques d'une comète

Une comète est un corps céleste, de petite taille (généralement moins de 10 km de diamètre), composé en grande partie de glace d'eau, qui parcourt une orbite elliptique, au cours de laquelle il s'approche du Soleil, puis le contourne, avant de s'éloigner vers l'extérieur du Système solaire. À l'approche du Soleil, la comète se transforme : la glace située à sa surface, portée à plusieurs centaines de degrés par l'énergie solaire, se sublime à un rythme qui peut être de plusieurs tonnes par seconde : c'est le phénomène du dégazage observé par la sonde Giotto. Un nuage de gaz et de poussière, d'un diamètre qui atteint plusieurs dizaines de milliers de kilomètres de rayon, la chevelure ou coma, se forme autour du corps de la comète appelé noyau. Les particules solides, poussées par la pression de radiation, forment une longue traîne blanchâtre, légèrement incurvée, qui s'oriente à l'opposé du Soleil et peut atteindre une longueur de plusieurs millions de kilomètres. Une deuxième queue, de couleur bleutée, encore plus longue, constituée de particules ionisées poussées par le vent solaire, s'oriente à l'opposé du Soleil. Pour les comètes les plus actives, ces excroissances, éclairées par le Soleil, deviennent visibles à l'œil nu depuis la Terre. Tous ces phénomènes disparaissent lorsque la comète s'éloigne à nouveau du Soleil[18].
On distingue deux grandes catégories de comètes. Les premières, en provenance de l'orbite de Jupiter, bouclent en quelques années leur orbite, qui est située dans l'écliptique, tout comme les planètes. D'autres ont une période qui peut atteindre plusieurs millions d'années et peuvent circuler sur un autre plan que l'écliptique. Les calculs de leur orbite ont montré que ces dernières provenaient d'une région de l'espace s'étendant de 10 000 à 100 ou 200 000 UA (soit à mi-distance de l'étoile la plus proche), qui a été baptisée nuage de Oort[19].
Comprendre la genèse du Système solaire

Il y a 4,6 milliards d'années, le Système solaire était encore une nébuleuse protosolaire constituée principalement d'hydrogène, d'hélium, de glace et de silicates. La nébuleuse a commencé à se condenser par effondrement gravitationnel déclenché peut-être par l'explosion d'une supernova à proximité. Le cœur de la nébuleuse est devenu de plus en plus dense et les chocs entre particules se sont multipliés, transformant l'énergie cinétique en chaleur. Environ 100 000 ans après le début de ce processus, une proto-étoile chaude, l'amorce du Soleil, s'est formée : au voisinage du Soleil, seuls les éléments les plus lourds et les moins volatils de la nébuleuse ont subsisté formant les planètes telluriques denses telles que la Terre, tandis que les matériaux plus légers comme l'hélium et la glace formèrent à plus grande distance des planètes gazeuses géantes comme Jupiter. Dans cette dernière région, certaines des briques élémentaires ne se sont pas agrégées aux corps plus massifs et ont été repoussées par effet de fronde gravitationnelle par la planète géante Jupiter jusqu'à la frontière du Système solaire. Ces petits corps faits de glace et de roche se sont regroupés dans deux immenses régions : la ceinture de Kuiper située à une distance comprise entre 30 et 100 unités astronomiques du Soleil et le nuage d'Oort qui forme une coquille qui entoure le Système solaire entre 10 000 unités astronomiques et 1 année-lumière du Soleil. Depuis la naissance du Système solaire, la composition de ces objets est restée pratiquement inchangée : l'éloignement du Soleil maintient la température de leur noyau à des valeurs très basses (−270 °C) ce qui leur permet de conserver à l'état solide les molécules les plus volatiles tandis que la gravité très faible de ces objets de petite taille n'entraîne aucune transformation métamorphique. Ces deux régions constituent le réservoir des comètes observées. Celles-ci sont chassées du nuage d'Oort ou de la ceinture de Kuiper par le passage du Système solaire à proximité d'une étoile, d'un nuage galactique ou par la pression du disque galactique[20] - [21] - [22]. Compte tenu de leur origine, les comètes sont donc des vestiges de la nébuleuse protosolaire pratiquement intacts qui devraient nous permettre de mieux comprendre le processus de formation du Système solaire. Or celui-ci est encore mal connu et les théories en vigueur sont régulièrement remises en question par de nouvelles découvertes comme celle, récente, de systèmes solaires comportant des exoplanètes aux caractéristiques — masse, distance à l'étoile — incompatibles avec tous les mécanismes de formation envisagés jusque-là[23].
À la recherche de l'origine de la vie

Durant les 500 premiers millions d'années du Système solaire, de nombreux corps célestes venus des régions périphériques et attirés par la gravité du Soleil se sont écrasés sur les planètes telluriques situées sur leur trajectoire. Les collisions entre comètes et planètes apportaient de l'eau mais également sans doute des composés organiques qui ont contribué à l'apparition de l'atmosphère primitive et peut-être même à celle de la vie. Les composés les plus complexes des comètes ne peuvent être détectés à distance car ils sont détruits dès qu'ils sont libérés par la comète. Seule une mission in situ, comme l'a démontré notamment la sonde Giotto, permet de les identifier et d'affiner ce scénario d'origine de la vie[23] - [22].
De nombreuses molécules sont dites chirales, c'est-à-dire qu'elles existent sous deux formes énantiomères (dextrogyre et lévogyre) égales, en quelque sorte, à leur image dans un miroir. Les acides aminés, présents dans la vie telle qu'elle est connue actuellement, sont chiraux ; cependant elle n'utilise qu'une seule forme (lévogyre) : elle est dite homochirale. Aussi, la découverte de molécules qui, en plus d'être d'intérêt biologique, sont homochirales, pourrait indiquer la présence de vie. Une question que se posent aujourd'hui les biologistes est « pourquoi la vie a-t-elle choisi la forme lévogyre plutôt que dextrogyre », d'autant plus que l'expérience de Miller (synthèse d'acides aminés censée reproduire l'atmosphère primitive terrestre) donne un mélange contenant autant de molécules lévogyres que dextrogyres. Des chercheurs ont tenté d'analyser et classer les acides aminés de la météorite de Murchison, découverte en 1969 en Australie et certains aboutissent à l'hypothèse que l'homochiralité de la vie a été favorisée par une surabondance de lévogyres provenant de météorites.
L'atterrisseur Philae étudiera les échantillons récoltés et permettra peut-être de comprendre l'origine de l'homochiralité du vivant[24].
Objectifs et profil de la mission Rosetta
L'objectif principal de Rosetta est l'étude de la comète Tchourioumov-Guérassimenko. Toutefois au cours de son périple vers la comète, la sonde spatiale traverse à plusieurs reprises la ceinture d'astéroïdes. Les concepteurs de la mission ont calculé la trajectoire de manière que Rosetta passe à proximité des astéroïdes (2867) Šteins en 2008 et (21) Lutèce en 2010. L'étude de ces deux astéroïdes constitue un objectif secondaire de la mission. Il est prévu que les instruments de la sonde recueillent des données générales sur ces deux astéroïdes, notamment le comportement dynamique, la morphologie de la surface et sa composition[25].
La comète 67P/Tchourioumov-Guérassimenko
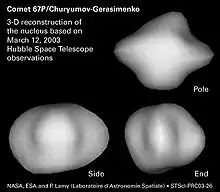
La comète Tchourioumov-Guérassimenko a été choisie comme cible de la mission après le report du lancement d'un an parce que ses caractéristiques (orbite, période, activité) permettaient d'effectuer un rendez-vous et d'atteindre les objectifs scientifiques fixés (il s'agissait en fait d'un retour à la cible initiale puisque la mission de référence initiale qui prévoyait un tir fin 2002 avait déjà 67P pour cible). Tchourioumov-Guérassimenko a été découverte en 1969 par l'astronome Klim Ivanovitch Tchourioumov sur une photo de la comète 32P/Comas Solá prise par Svetlana Ivanovna Guérassimenko. Klim se rendit compte que l'objet photographié correspondait en fait à une nouvelle comète qui était située au moment de la prise de vue à environ 2° de la comète visée. La comète a une histoire assez particulière car son orbite a été fortement modifiée à deux reprises au cours des 200 dernières années : jusqu'en 1840 elle ne s'approchait jamais à moins de 4 unités astronomiques (UA) soit 600 millions de kilomètres du Soleil et restait donc invisible depuis la Terre. Cette année-là, un passage à faible distance de la planète géante Jupiter modifia son orbite et son périhélie (point de son orbite le plus proche du Soleil) chuta à 450 millions de kilomètres. En 1959, un nouveau passage près de Jupiter réduisit encore son périhélie à 1,29 UA. La comète, dont la magnitude varie entre 10 et 24[26], a été observée à sept reprises en 1969, 1982, 1989 et 1996, 2002 et 2008. C'est une comète assez active qui libère, au pic de son activité lorsqu'elle approche le Soleil, environ 60 kg de matière par seconde composée pour deux tiers de gaz et un tiers de matière solide d'après des observations effectuées en 2002 et en 2003. C'est toutefois 40 fois moins que la comète de Halley. Sa densité est faible puisqu'elle était estimée avant les mesures effectuées par Rosetta à 0,37 ce qui implique que sa porosité (la proportion des vacuités à l'intérieur du noyau) est proche de 80 %[27].
La comète parcourt son orbite en 6,57 années. Des photos réalisées avec le télescope spatial Hubble en ont permis de préciser les dimensions du noyau. C'est un objet de forme ellipsoïdale qui mesure 5 km sur 3 km et tourne sur lui-même en environ 12 heures[28].
| Caractéristiques physiques | Paramètres orbitaux | ||||||||
| Type | Dimensions | Masse | Densité | Aphélie | Périhélie | Inclinaison | Période de révolution | Période de rotation | |
|---|---|---|---|---|---|---|---|---|---|
| Tchourioumov-Guérassimenko | Comète périodique | 3,45 × 4 km | 1013 kg | 0,4 | 3,46 UA | 1,24 UA | 7,04° | 6,44 ans | 12,4 heures |
| (21) Lutèce | Astéroïde de type indéterminé | ~121 × 101 × 75 km | 1,7 × 1018 kg | 3,4 | 2,83 UA | 2,04 UA | 3,06° | 3,8 ans | 8,17 heures |
| (2867) Šteins | Astéroïde de type E | ~6,67 × 5,81 × 4,47 km | - | - | 2,71 UA | 2,02 UA | 9,95° | 3,63 ans | ~6 heures |
Les astéroïdes (2867) Šteins et (21) Lutèce
La sonde traverse au cours de son périple plusieurs fois la ceinture d'astéroïdes, située entre les orbites de Mars et Jupiter, qui rassemble un grand nombre d'objets de petite taille. À deux reprises, Rosetta passe suffisamment près d'un de ces petits corps pour permettre d'effectuer des observations détaillées.
(2867) Šteins
L'astéroïde (2867) Šteins a un diamètre d'environ 4,6 kilomètres. Il a été découvert le par Nikolaï Tchernykh, un astronome russe. L'Observatoire européen austral l'a identifié comme étant de type E, c'est-à-dire composé d'enstatite (Fe2Si2O6).
(21) Lutèce
L’astéroïde (21) Lutèce a été découvert en 1852 par Hermann Mayer Salomon Goldschmidt, astronome amateur et peintre allemand. Cet astéroïde est de type M c'est-à-dire ayant un albédo faiblement lumineux mais contrairement aux autres astéroïdes de cette classe, il semble qu'il ne contienne pas de composés métalliques. Il appartient à la ceinture d'astéroïdes et mesure près de 96 kilomètres de long et a une masse de 9,2 × 1017 kilogrammes.
Profil de la mission
Contrairement aux missions d'étude des comètes qui l'ont précédé qui n'ont réalisé que des survols, Rosetta doit se placer en orbite autour de Tchourioumov-Guérassimenko. Pour y parvenir la sonde spatiale doit synchroniser son vecteur vitesse sur celui de ce corps céleste. Les comètes circulent à des vitesses élevées et cet objectif est difficile à atteindre si on analyse les missions qui ont précédé Rosetta : la vitesse relative de la sonde européenne Giotto par rapport à la comète de Halley était de 68 km/s au moment de son rendez-vous[35] tandis que celle de Deep Impact était de 28,6 km/s par rapport à la comète Tempel 1[36]. Aussi, même le recours aux lanceurs les plus puissants ne permet pas un rendez-vous direct entre la sonde et la comète : Rosetta doit utiliser à quatre reprises l'assistance gravitationnelle des planètes pour parvenir à faire coïncider sa trajectoire et sa vitesse avec celles de la comète et sacrifier près de la moitié de sa masse constituée de carburant pour donner un dernier coup de frein durant l'approche finale.
Après avoir étudié les caractéristiques du noyau, Rosetta doit se placer en orbite autour de celui-ci. Puis la sonde posera un atterrisseur sur le sol de la comète chargé de compléter les informations collectées à distance. Les responsables de la mission ont soigneusement choisi le moment du rendez-vous entre la sonde et la comète qui se situe à plus de 3 Unités Astronomiques du Soleil : le Soleil est suffisamment proche pour que les panneaux solaires fournissent l'énergie nécessaire aux équipements de la sonde spatiale tandis que la comète est alors suffisamment éloignée du Soleil pour que le dégazage soit faible ou nul et ne rende pas l'approche et l'atterrissage difficile. Au cours de l'année qui va suivre le rendez-vous, la comète va se rapprocher puis passer près du Soleil : Rosetta pourra ainsi assister au réveil de la comète au fur et à mesure de l'échauffement de sa surface et analyser grâce à ses instruments le processus et les matériaux éjectés. Le plan de vol nominal prévoit que la mission s'achève lorsque la comète commencera à s'éloigner à nouveau du Soleil.
La mission de Rosetta est d'étudier, à l'aide des 21 instruments scientifiques embarqués sur l'atterrisseur et l'orbiteur, le lien qui existe entre les comètes et la matière interstellaire et le rôle joué par les comètes dans la formation du Système solaire. Les mesures effectuées par la sonde lorsqu'elle aura atteint la comète portent sur[25] :
- les principales caractéristiques du noyau, son comportement dynamique, la composition et la morphologie de sa surface ;
- la composition chimique, minéralogique et isotopique des matériaux volatils et solides du noyau ;
- les caractéristiques physiques et les interactions entre les matériaux volatils et solides du noyau ;
- le déroulement de l'activité de la comète (dégazage) et les processus à la surface et dans la chevelure (interactions entre la poussière et les gaz).
Caractéristiques techniques de la sonde spatiale Rosetta
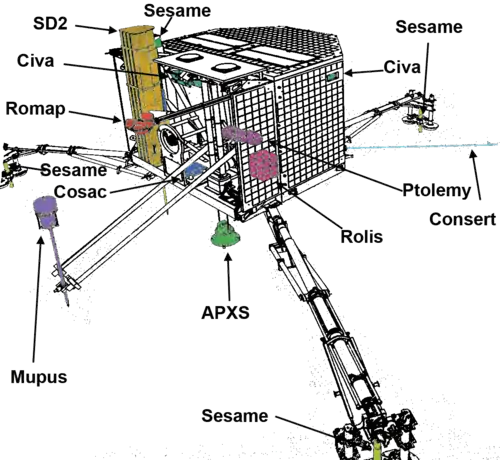
La sonde Rosetta est constituée de deux parties : un orbiteur, qui doit se placer en orbite autour de la comète après avoir effectué une longue navigation et qui est chargé d'étudier et de cartographier celle-ci, de recueillir des données sur les astéroïdes qu'il rencontrera au cours de son parcours et de transmettre les résultats à la Terre et le petit atterrisseur de 100 kg Philae, monté sur un des côtés de la sonde, qui doit se poser sur le sol de la comète.
L'orbiteur
L'orbiteur a la forme d'un parallélépipède de 2,8 mètres par 2,1 mètres par 2 mètres (environ 10 mètres cubes) pour une masse totale de 2 970 kilogrammes (1 300 kg sans le carburant). Son envergure, une fois les panneaux solaires déployés en orbite, atteint 32 mètres.
.jpg.webp)
Système de commande d'attitude et d'orbite
.jpg.webp)

La propulsion de Rosetta est assurée par 24 petits moteurs-fusées à ergols liquides fournissant chacun 10 newtons de poussée qui disposent de 1 670 kg de carburant (monométhylhydrazine/peroxyde d'azote) pour effectuer les corrections orbitales au cours du long périple de la sonde puis placer celle-ci en orbite autour de la comète[37]. Les ergols sont stockés dans deux réservoirs de 1 106 litres, le premier contenant 660 kg de monométhylhydrazine, le second 1 060 kg de peroxyde d'azote[38].
Rosetta, lorsque la sonde spatiale n'est pas en hibernation, est stabilisée sur 3 axes c'est-à-dire que son orientation reste fixe ; son système de navigation utilise deux viseurs d'étoile pour déterminer l'orientation de la sonde afin de pointer avec exactitude ses antennes de télécommunications, panneaux solaires et instruments scientifiques. Ce capteur doit fonctionner dans des conditions particulières durant l'approche de la comète. Celle-ci est entourée d'un nuage diffus de poussière qui peut rendre difficile l'identification d'une étoile. Un logiciel a été développé pour permettre à l'instrument de fonctionner dans ces conditions. Les changements d'orientation sont réalisés à l'aide de 4 roues de réaction. Le système de contrôle d'attitude comprend également des senseurs solaires et une centrale à inertie utilisant trois gyrolasers. Une caméra de navigation NavCam (Navigation Camera) ayant un champ optique de 5° et dotée d'une résolution de 1 024 × 1 024 pixels est utilisée pour les manœuvres d'approche des astéroïdes et de la comète. À la suite d'un choix de ses concepteurs qui décident de diffuser sous licence libre les images de la comète réalisées à l'aide de cette caméra, elle est la principale source des photos diffusées par l'Agence spatiale européenne et disponibles sur Wikipedia[39] - [40].
Système de télécommunications
Le système de télécommunications de Rosetta utilise une antenne parabolique grand gain orientable de 2,2 mètres de diamètre. La sonde spatiale dispose également d'une antenne moyen gain de 0,8 mètre de diamètre et de deux antennes omnidirectionnelles à faible gain toutes fixes. Les liaisons sont assurées en bande X et S. Le débit est compris entre 5 et 20 kilobits par seconde. La station de New Norcia, construite en Australie par l'Agence spatiale européenne pour communiquer notamment avec Rosetta, n'est visible que 12 heures par jour par la sonde du fait de la rotation de la Terre ; d'autre part, celle-ci sera, à certains moments, masquée par le Soleil. Durant les périodes où le signal ne peut être reçu, Rosetta stocke les données recueillies dans une mémoire de masse de 25 Go puis les retransmet lorsque la fenêtre de communication le permet[41] - [40].
L'alimentation électrique
L'alimentation en énergie de Rosetta est assurée par deux panneaux solaires comportant chacun cinq éléments qui peuvent pivoter de plus ou moins 180° pour capter le maximum de l'énergie solaire photovoltaïque. Chaque panneau est long de 15 mètres et la surface totale est de 64 m2. Les panneaux fournissent entre 8 700 watts et 450 watts de puissance suivant la position de la sonde par rapport au Soleil. La sonde a besoin de 390 watts pour être maintenue en état de marche avec le minimum d'équipements actifs. La taille importante des panneaux solaires s'explique par la grande distance entre le Soleil et la sonde sur une partie de sa trajectoire. Jusque-là les sondes lancées à une telle distance du Soleil, comme Voyager 1 et Voyager 2, embarquent des générateurs thermoélectriques à radioisotopes qui produisent de l'énergie électrique grâce à la chaleur émise par la désintégration radioactive. Cette technologie n'étant pas disponible en Europe, cette source d'énergie a été remplacée par des panneaux solaires de grande taille conçus pour fonctionner à des températures très basses tout en optimisant la production d'énergie. Rosetta est la première sonde alimentée par l'énergie solaire à voyager au-delà de la ceinture d'astéroïdes. L'énergie électrique est stockée dans quatre accumulateurs nickel-cadmium de 10 Ah qui alimentent un circuit de distribution sous une tension de 28 Volts[12] - [42] - [40].
Système de régulation thermique
Le système de régulation thermique de Rosetta doit maintenir l'intérieur de la sonde spatiale à une température d'environ 20 °C. Rosetta, qui voyagera dans le Système solaire, rencontrera des températures variées : à 800 millions de kilomètres du Soleil, l'intensité du rayonnement solaire n'est plus suffisante pour chauffer la sonde, il est donc nécessaire d'employer des dispositifs de chauffage ; au contraire, au plus près du Soleil, afin d'éviter une surchauffe, des radiateurs sont installés pour dissiper l'énergie thermique. Rosetta est également munie d'un système de 14 lamelles réparties sur 2,5 m2, des persiennes qui s'ouvrent au Soleil pour laisser échapper la chaleur, mais qui se referment à l'ombre, à l'image des stores vénitiens[43]. Ce système, testé avec succès au Centre européen de technologie spatiale (ESTEC), permet de réguler la température sans consommation électrique[44].
Instruments scientifiques
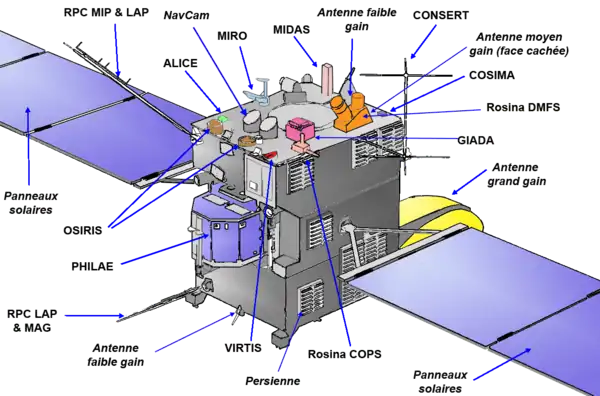
La charge utile de l'orbiteur comporte onze instruments scientifiques qui représentent une masse de 165 kg :
- ALICE (Ultraviolet Imaging Spectrometer) est un spectromètre imageur ultraviolet[45] similaire à celui embarqué sur la sonde New Horizons[46] destiné à analyser la composition de la coma, de la queue et la production d'eau ainsi que de monoxyde et dioxyde de carbone par le noyau. D'un poids de 3,1 kg, cet instrument consomme 2,9 W et a été fabriqué aux États-Unis[47] ;
- CONSERT (Comet Nucleus Sounding Experiment by Radiowave Transmission) est un sondeur radiofréquence conçu pour l'étude de la structure interne du noyau. Lorsque Philae est posé sur le noyau et que Rosetta orbite autour, Consert mesure la propagation des ondes électromagnétiques métriques (90 MHz) à travers le noyau lorsque celui-ci s'interpose entre Rosetta et Philae. L'étude du signal mesuré (délai, puissance, chemins multiples) permet d'obtenir des informations sur la structure interne et la composition du noyau : densité, hétérogénéité, présence de vides ou de zones plus denses et doit ainsi contribuer à une meilleure compréhension des processus de formation de la comète[48]. Consert est un instrument conçu et réalisé par l'IPAG (CNRS/UJF, Grenoble, France)[49], le LATMOS (CNRS/UVSQ, Paris, France) et le MPS (Lindau, Allemagne) sous financement CNES et DLR[50] ;
- COSIMA (Cometary Secondary Ion Mass Analyser) est un spectromètre à temps de vol qui doit analyser la composition des grains de poussière éjectés par la comète afin de déterminer s'ils sont organiques[51] - [52] ;
- GIADA (Grain Impact Analyser and Dust Accumulator) mesure le nombre, la masse, la distribution des vecteurs de dispersion (vitesse, direction) des grains de poussière émis par la comète et réfléchis par la pression de radiation[53] - [54] ;
- MIDAS (Micro-Imaging Dust Analysis System) mesure la taille, la forme et le volume des particules autour de la comète[55] - [56] ;
- MIRO (Microwave Instrument for the Rosetta Orbiter) est un radiotélescope fonctionnant dans la bande millimétrique et sub-millimétrique chargé essentiellement de déterminer la température de la surface et d'identifier les parties de la surface couvertes de poussières et de glace : ces informations sont primordiales pour déterminer les sites d'atterrissage propices[57] - [58] ;
- OSIRIS (Optical, Spectroscopic, and Infrared Remote Imaging System) comporte deux caméras optiques à haute résolution (4 mégapixels) fonctionnant dans un spectre lumineux allant de l'ultraviolet au proche infrarouge qui peuvent être couplées pour obtenir des images stéréoscopiques. Elles doivent permettre d'effectuer un relevé topographique du noyau avec une résolution d'un mètre, déterminer la rotation du noyau et observer le dégazage, suivre les poussières et les jets de gaz et enfin photographier les astéroïdes[59] : Osiris comprend une caméra à petit champ (2,5° × 2,5°) NAC (Narrow Angle Camera) et une caméra grand champ (12° × 12°) WAC (Wide Angle Camera). Les données sont enregistrées sur une mémoire de 1 gigaoctet[60]
- ROSINA (Rosetta Orbiter Spectrometer for Ion and Neutral Analysis) est un spectromètre des gaz nobles et ionisés qui doit déterminer la composition de l'atmosphère et de l'ionosphère de la comète, les réactions chimiques qui y ont lieu ainsi que la vitesse des particules gazeuses ionisées[61] - [62] ;
- RPC (Rosetta Plasma Consortium) est constitué de cinq analyseurs de plasma et de deux sondes de Langmuir ; il est chargé d'étudier la structure de la coma interne et l'interaction de la comète avec le vent solaire, doit surveiller l'activité cométaire et mesurer les propriétés physiques du noyau[63] - [64] ;
- RSI (Radio Science Investigation) mesure la masse, la densité et la gravité du noyau. Il est également utilisé pour préciser l'orbite de la comète et étudier sa coma[65] - [66] ;
- VIRTIS (Visible and Infrared Thermal Imaging Spectrometer) est un spectromètre-imageur travaillant en lumière visible et dans l'infrarouge. Il est chargé d'établir une carte de la nature des solides et la température à la surface. Cet instrument est également utilisé afin de localiser les sites d'atterrissage[67] - [68].
Caractéristiques techniques

L'atterrisseur Philae s'est posé le sur le noyau de la comète pour étudier in situ les caractéristiques de celui-ci à l'aide des 10 instruments scientifiques dont il dispose. Il se présente sous la forme d'un cylindre polygonal d'un mètre de diamètre pour 80 cm de haut et d'une masse totale de 97,9 kg dont 26,7 kg d'instrumentation scientifique. La structure est réalisée en fibre de carbone avec des panneaux en nids d'abeille d'aluminium. Il comprend une partie chaude isolée de l'extérieur et une partie froide située à l'arrière dans laquelle se trouvent le système de fixation à l'orbiteur et les instruments déployés une fois Philae au sol : SD2, ROMAP, APXS et MUPUS[69]. L'atterrisseur est fixé à l'orbiteur par un mécanisme qui permet une séparation à une vitesse préajustable entre 0,05 et 0,52 m/s. Philae dispose d'un train d'atterrissage tripode conçu pour amortir sa vitesse d'arrivée. Le corps de Philae peut pivoter et s'incliner (via une suspension à cardan) sur son train d'atterrissage. Ce mécanisme permet de compenser l'inclinaison du terrain, optimiser l'incidence des rayons lumineux sur les panneaux solaires et effectuer des prélèvements d'échantillons du sol à différents emplacements. L'atterrisseur dispose d'une roue de réaction qui est mise en rotation à 9 600 tours par seconde, fournissant un moment cinétique de 6,2 N m s. Celle-ci est utilisée pour stabiliser l'orientation de Philae durant sa descente vers le sol. L'atterrisseur ne dispose d'aucun système de propulsion pour corriger sa trajectoire ou son orientation. Son trajet jusqu'au sol de la comète dépend uniquement du point où se produit la séparation avec l'orbiteur ainsi que de la vitesse et de l'orientation acquises à ce moment-là[70].
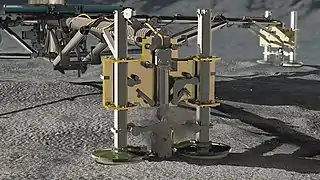
En raison du manque d'informations sur la consistance de la surface au lancement de la sonde, trois dispositifs d'atterrissage complémentaires sont prévus. Les pieds du train d'atterrissage sont munis de surfaces de contact suffisamment larges pour éviter à la sonde de s'enfoncer dans un sol mou. Pour éviter un rebond Philae est muni d'un système propulsif à gaz froid (azote) qui plaque au sol l'engin immédiatement après le contact avec la surface de la comète. Enfin deux harpons tirés depuis la partie inférieure de l'atterrisseur et des vis situées au niveau des pieds doivent lui permettre de se fixer solidement au sol[71]. Pour éviter que l'atterrisseur ne rebondisse, les trois pieds du train d'atterrissage sont équipés d'absorbeurs de chocs.
Le contrôle thermique constitue un des aspects les plus complexes de l'atterrisseur : celui-ci doit pouvoir fonctionner lorsque la comète se situe entre 2 et 3 Unités Astronomiques (U.A.). Par ailleurs, à la conception, il y a de nombreuses incertitudes sur l'ensoleillement de la zone d'atterrissage (lié à la rotation). Philae ne dispose pas de suffisamment d'énergie pour utiliser des résistances chauffantes. Les couches d'isolant sont donc conçues de manière que l'atterrisseur survive à la période la plus froide (à 3 U.A.), avec un système de stockage et de récupération de chaleur durant les moments d'ensoleillement. Lorsque le Soleil se rapproche à moins de 2 U.A., la température, devenue trop importante pour l'électronique, entraîne la fin des opérations[72].
L'énergie électrique est fournie par des batteries primaire et secondaire ainsi que des panneaux solaires. La batterie primaire non rechargeable a pour rôle de fournir de l'énergie durant les 5 premiers jours d'opération, de manière à garantir que les principales mesures scientifiques seront réalisées quel que soit l'ensoleillement du site d'atterrissage. Cet accumulateur au lithium comprend 32 cellules utilisant le couple lithium-chlorure de thionyle (Li-SOCl2) qui doivent fournir, au moment du déploiement de Philae, 1 000 watts-heures (1 200 Wh au lancement). La batterie secondaire rechargeable, de type lithium-ion et d'une capacité de 130 watts-heures (150 Wh au lancement), permet de poursuivre la mission une fois la batterie primaire épuisée. Elle est alimentée par des panneaux solaires qui recouvrent une grande partie de l'atterrisseur et qui fournissent 10 W de puissance (à 3 U.A.)[73].
Les données acquises sont stockées dans une mémoire de masse d'une capacité de 12 mégabits et transmises à l'orbiteur lorsque celui-ci est visible à l'aide d'un émetteur radio bande S d'une puissance d'un watt permettant un débit d'environ 10 kilobits par seconde. L'orbiteur transmet à son tour les données vers la Terre lorsque celle-ci est située dans l'axe de son antenne orientable et que les antennes de réception sont disponibles[9].
 Vue du dessus de l'atterrisseur.
Vue du dessus de l'atterrisseur. Deux harpons destinés à fixer l'atterrisseur sur le sol de la comète sont installés sous l'atterrisseur.
Deux harpons destinés à fixer l'atterrisseur sur le sol de la comète sont installés sous l'atterrisseur. Détail du harpon.
Détail du harpon.
Instruments scientifiques

La charge utile de l'atterrisseur Philae est composée de dix instruments scientifiques qui représentent une masse de 26,7 kg[74] :
- APXS (Alpha X-ray Spectrometer) est un spectromètre à rayons X, alpha et protons chargé de déterminer la composition du noyau de la comète[75] ;
- CIVA (Comet Infrared & Visible Analyser), d'origine franco-suisse, comprend cinq caméras panoramiques, un couple de caméras stéréoscopiques fournissant des images en relief, un spectromètre infrarouge ainsi qu'un microscope optique analysant des échantillons avec une résolution de 7 μm. Il s'agit d'un filtre dichroïque réalisé par REOSC ayant des performances photométriques très élevées et une transition réduite entre les bandes spectrales transmises et les bandes spectrales bloquées. Chaque caméra pèse 100 g et a une résolution d'un mégapixel. Les composants peuvent résister à des températures comprises entre −100 °C et 50 °C[76] - [77] ;
- CONSERT (Comet Nucleus Sounding Experiment by Radiowave Transmission) est un sondeur radar qui sera utilisé en parallèle avec le même équipement embarqué sur l'orbiteur[50] ;
- COSAC (Cometary Sampling and Composition experiment) est un pyrolyseur et analyseur (spectromètre de masse et chromatographe) qui doit analyser les gaz et les molécules organiques complexes prélevés dans le sol par SD2. Des échantillons prélevés sur le sol et dans le sous-sol seront portés à 800 °C dans le pyrolyseur puis analysés[78] ;
- PTOLEMY mesure la composition isotopique des éléments légers (Hydrogène, carbone, azote et oxygène) dans les échantillons de sol prélevés par SD2[79] ;
- MUPUS (Multi-Purpose Sensors for Surface and Subsurface Science) est un ensemble de détecteurs mesurant la densité, les propriétés thermiques et mécaniques de la surface[80] ;
- ROLIS (Rosetta Lander Imaging System) est une caméra CCD à haute définition située sous l'atterrisseur qui enregistrera des images de la zone d'atterrissage avant que Philae se pose puis des images de la structure du sol après cet événement[81] ;
- ROMAP (Rosetta Lander Magnetometer and Plasma Monitor) est un magnétomètre qui doit mesurer l'intensité du champ magnétique de la comète et les interactions avec le vent solaire[82] ;
- SD2 (Sample and Distribution Device) comprend un instrument de forage capable d'atteindre une profondeur de 25 cm de profondeur et de préparer un échantillon qui est ensuite transmis aux mini-laboratoires PTOLEMY et COSAC[83] ;
- SESAME (Surface Electrical, Seismic and Acoustic Monitoring Experiments) est composé de trois instruments qui étudient la propagation des ondes sonores à travers la surface, les propriétés électriques et les poussières retombant à la surface[84].
Le contrôle au sol

Le contrôle de la mission est assuré par le Centre européen d'opérations spatiales (ESOC) à Darmstadt, en Allemagne. La salle de contrôle, dédiée aux missions européennes à destination des autres planètes du Système solaire, est partagée avec les missions Mars Express et Vénus Express. L'équipe de contrôle au sol de Rosetta est assistée par une équipe chargée du calcul de la trajectoire, et utilise le logiciel SCOS-2000. Le Centre des opérations scientifiques de Rosetta (Rosetta Science Operations Centre), chargé de la collecte et de la diffusion des données scientifiques, est implanté à l'ESOC, mais également au Centre européen de technologie spatiale (ESTEC) aux Pays-Bas. L'atterrisseur est contrôlé par l'Agence spatiale allemande (DLR) depuis Cologne ; les données collectées par Philae sont traitées par le Centre national d'études spatiales (CNES), à Toulouse.
La complexité de la mission a nécessité la mise au point de plusieurs innovations. La sonde est notamment mise en hibernation durant plusieurs années pour économiser l'énergie qui se raréfie lorsque la sonde se dirige vers Jupiter et ménager les équipements du bord. Pendant les phases de routine, un seul contact est établi par semaine avec le centre de contrôle.
Pour les communications avec Rosetta, l'agence spatiale européenne utilise la station de New Norcia qu'elle a fait édifier près de Perth en Australie. Celle-ci est entrée en service en 2003 peu de temps avant le lancement de Rosetta et est télécommandée depuis le Centre européen d'opérations spatiales[85]. La station de Cebreros, en Espagne, également détenue par l'agence spatiale, est utilisée en appoint[alpha 2] ; toutes deux sont équipées d'antennes paraboliques de 35 mètres de diamètre et sont conçues pour pouvoir communiquer avec les sondes les plus éloignées. Si Rosetta n'est pas en vue de ces deux stations, les antennes de Madrid, de Goldstone et de Canberra du réseau de communications en espace profond de la NASA peuvent être utilisées. Deux canaux du réseau de communications avec l'espace lointain sont attribués à la sonde spatiale Rosetta afin de pouvoir communiquer avec la Terre : 8 421,790 123 MHz et 8 423,148 147 MHz. Ces deux fréquences sont celles de l'émetteur à bord de la sonde et ne tiennent donc pas compte de l'effet Doppler.
Chronologie

Pour réaliser son rendez-vous avec 67P/Tchourioumov-Guérassimenko, Rosetta décrit en dix ans quatre orbites autour du Soleil. Elle utilise l'assistance gravitationnelle de la Terre et de Mars pour relever progressivement son apogée et modifier son inclinaison jusqu'à la faire coïncider avec celle de la comète. Durant son périple, elle traverse à deux reprises la ceinture d'astéroïdes, ce qui lui permet d'effectuer des survols à faible distance de Šteins et (21) Lutèce.
Lancement (2004)
Le lancement de la sonde Rosetta a lieu le à 7 h 17 min 44 s UTC (4 h 17, heure locale) après deux reports dus à un problème technique et à des conditions météorologiques défavorables[alpha 3], depuis le centre spatial de Kourou, en Guyane française. Il s'agit du premier vol de la version G+ d'Ariane 5 et du 158e vol du lanceur Ariane. Les étages d'accélération à poudre et l'étage principal cryotechnique fonctionnent de manière nominale. Ce dernier est largué alors que le lanceur atteint une altitude de 173,4 km. La suite du vol d'Ariane est très différente de ce qui est pratiqué pour les lancements commerciaux qui constituent le fonds de commerce du lanceur. Avant d'allumer le second étage, le lanceur suit une trajectoire balistique qui lui fait parcourir une partie d'une orbite elliptique très allongée dont l'apogée et le périgée sont respectivement de 4 000 km et 45 km. Une heure, 45 minutes et 47 secondes après le décollage, le deuxième étage de type EPS, à propergols stockables, est allumé pendant 17 minutes, imprimant à Rosetta suffisamment de vitesse pour échapper à la gravité terrestre. La sonde est larguée par le dernier étage du lanceur 2 heures, 13 minutes et 30 secondes après le décollage[86]. La précision de l'injection de Rosetta sur sa trajectoire est suffisante pour que l'ESA puisse confirmer, le , que la sonde survolera comme prévu les astéroïdes (2867) Šteins et (21) Lutèce[87] - [14]. Une semaine après le début de la mission les instruments sont mis en marche les uns après les autres pour vérifier leur fonctionnement et les calibrer. Au cours de la première année de vol plusieurs corrections sont apportées à la trajectoire, dont une manœuvre impliquant un changement de vitesse de 152,8 m/s le . En et , les comètes C/2002 T7 (en) LINEAR et Giacobini-Zinner sont étudiées à distance avec le magnétomètre de la sonde spatiale. Les caméras embarquées réalisent également plusieurs photos de la sonde spatiale, dont une relativement spectaculaire montrant les panneaux solaires[88].
Première assistance gravitationnelle de la Terre (2005)
Afin de gagner en vitesse et adapter sa trajectoire, Rosetta utilise l'assistance gravitationnelle. Celle-ci permet, en utilisant l'attraction d'un corps céleste massif, planète ou lune, de modifier la vitesse et la trajectoire d'une sonde. L'effet est d'autant plus important que l'engin spatial frôle de près le corps céleste. La déviation et l'accélération obtenues dépendent également de l'angle d'approche et de la vitesse relative des deux protagonistes. Seul le recours à l'assistance gravitationnelle, qui permet d'économiser de grandes quantités de carburant, permet le lancement des missions comme Rosetta car aucun lanceur n'est suffisamment puissant pour placer une sonde directement sur la trajectoire avec ce type d'objectif. Lorsque la sonde a été mise en orbite par le lanceur Ariane, sa vitesse par rapport au Soleil, dite vitesse héliocentrique, est égale à celle de la Terre soit 30 km/s. La sonde va frôler par la suite à trois reprises la Terre pour accélérer : sa vitesse héliocentrique va passer successivement à 33,8 km/s, 35,1 km/s et 38,7 km/s au dernier passage[89]. L'assistance gravitationnelle de Mars, qui est mise en œuvre après le premier passage proche de la Terre, sert uniquement à modifier la trajectoire de Rosetta de manière à la faire longer à nouveau la Terre pour la deuxième assistance gravitationnelle[90].
Le , Rosetta frôle la Terre (en anglais Earth Swing-By, abrégé ESB), passant à environ 1 954 km au-dessus de l'Océan Pacifique à l'ouest de Mexico. Les stations au sol calculent que la sonde a accéléré de 3,797 km/s[91] avec une erreur de 1,8 millimètre par seconde, chiffre confirmé par la NASA[92]. Les sondes NEAR Shoemaker et Galileo, qui avaient également utilisé comme Rosetta la Terre pour réaliser une manœuvre d'assistance gravitationnelle respectivement en 1998 et 1990 avaient également observé un écart de 4 et 13 mm/s par rapport aux prévisions. Plusieurs instruments sont utilisés et des photos du sol sont prises sur plusieurs longueurs d'onde en lumière visible et en infrarouge. Des photos panoramiques de la Terre sont prises par les caméras de Philae et le magnétomètre est calibré à l'aide du champ magnétique terrestre dont les caractéristiques sont bien connues. Lors du survol de la Lune qui a lieu 16 heures plus tard, le logiciel chargé de gérer le pointage des caméras lors des survols est testé. Il est prévu que la sonde spatiale soit mise en semi-hibernation après ce survol, mais cette mise en sommeil est repoussée de quelques mois à la demande de la NASA qui souhaite que les instruments de Rosetta observent la comète Tempel 1 au moment de la collision de l'impacteur de la sonde américaine Deep Impact. Le , bien que situés à 80 millions de km de la comète au moment de l'impact, les instruments de Rosetta permettent d'estimer que l'impact a libéré 4 600 tonnes d'eau[93].
Deuxième assistance gravitationnelle de la Terre et survol de Mars (2007)
.jpg.webp)
Le la sonde réalise sa deuxième manœuvre d'assistance gravitationnelle en frôlant Mars. La veille, Rosetta est orientée afin que ses instruments puissent étudier la planète ; OSIRIS, ALICE, VIRTIS, CIVA, ROMAP, RSI, sont mis en marche quelques heures avant le survol : celui-ci comporte un certain risque car, pendant 15 minutes, la sonde se situe dans l'ombre de Mars où ses panneaux solaires ne reçoivent aucune énergie du Soleil et qui bloque toute communication avec la Terre. Peu avant le début de l'éclipse, la sonde est basculée en mode de veille (stand-by mode) afin de minimiser la consommation électrique ; seul Philae, disposant de son propre système d'alimentation, est allumé et effectue des mesures[94]. Rosetta passe dans l'ombre de la planète rouge à 1 h 52 TU. Deux minutes après, elle est à 250 km d'altitude. Le contact reprend à 2 h 6. Cependant, Rosetta reste dans le noir jusqu'à 2 h 19[95].
Le , Rosetta effectue son second survol de la Terre (ESB2). Son orbite s'allonge et sa période est désormais d'exactement deux ans. L'accélération obtenue est conforme aux prévisions. Au cours de son passage à proximité de la Terre, Rosetta, prise par erreur pour un astéroïde et brièvement dénommée 2007 VN84, déclenche une fausse alerte de collision potentielle d'un corps céleste avec la Terre[96].
Survol de l'astéroïde (2867) Šteins (2008)
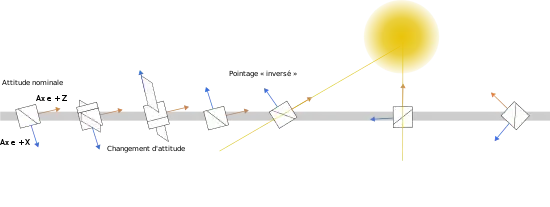
Le , les instruments scientifiques sont activés pour permettre l'observation de l'astéroïde (2867) Šteins. La sonde le survole à 800 km, le à 17 h 45 UTC, avec une vitesse relative de 8,6 kilomètres par seconde. Malgré une panne quelques minutes avant le rendez-vous de la caméra à petit champ NAC capable de fournir des photographies à haute définition, les données récupérées à l'aide des autres instruments ont permis de confirmer le bon fonctionnement de ceux-ci et ont fourni une image relativement détaillée de la surface de l'astéroïde qui présente la forme d'un diamant[97]. L'exposition de certaines faces de Rosetta au Soleil est « défendue » par l'architecture de la sonde. En effet, les équipements dissipant une grande quantité de chaleur ont été placés sur les côtés d'ombre, munis de persiennes. Or, pendant la phase d'approche finale, l'attitude de Rosetta était telle que ces faces pointaient dans la direction du Soleil, exposant des parties sensibles. Afin d'éviter d’abîmer des instruments, une manœuvre de rotation de 180° autour de l'axe +Z a donc été menée pendant 20 minutes, 40 minutes avant l'approche finale, limitant ainsi l'exposition au Soleil[98].
Dernière assistance gravitationnelle de la Terre (2009)
.jpg.webp)
Une manœuvre de correction de trajectoire, permettant de passer à la distance prévue de la Terre, est effectuée le , trois semaines avant le survol. À 13 h 51 UTC, les quatre moteurs axiaux de la sonde, de 10 newtons, sont allumés durant 1 minute et 27 secondes et fournissent un delta-V de 8,8 cm/s[99].
Le , la sonde utilise l'attraction de la Terre pour sa dernière assistance gravitationnelle : à 7 h 45 min 40 s UTC, Rosetta passe à 2 481 km au-dessus de l'île de Java, en Indonésie, avec une vitesse relative de 13,34 km/s. Cette manœuvre permet de gagner 3,6 km/s[100]. Aucune anomalie n'a été constatée au niveau de la vitesse[101]. Grâce à cette dernière manœuvre la sonde navigue à une vitesse de 38,7 km/s contre 30 km/s à son lancement. Rosetta est désormais sur une orbite très allongée dont l'apogée, située à 5,33 unités astronomiques (800 millions de kilomètres) l'amène à proximité de l'orbite de la planète Jupiter. Tout en s'éloignant de la Terre, la trajectoire de la sonde va converger progressivement avec celle de la comète, qu'elle doit rejoindre après avoir commencé à parcourir la partie de son orbite qui la ramène vers les planètes internes[102].
Mi-juillet 2010, Rosetta est devenue la première sonde spatiale équipée de panneaux solaires à s'être autant éloignée du Soleil[102]. Pour réduire la consommation d'une énergie qui va se faire rare, mais également pour limiter les coûts opérationnels et la fatigue de l'électronique, la sonde doit être placée en sommeil à compter de 2011 jusqu'en 2014. En , une répétition de ce mode est réalisée sur le modèle de tests (Electrical Qualification Model, abrégé EQM) au Centre européen d'opérations spatiales, avant un essai sur la sonde elle-même en [103].
Survol de l'astéroïde (21) Lutèce et mise en sommeil (2010)
Alors que la sonde entame sa dernière orbite qui doit l'amener presque jusqu'à l'orbite de Jupiter, elle traverse la ceinture d'astéroïdes. Le , la caméra OSIRIS est utilisée conjointement avec le télescope spatial Hubble afin d'étudier l'objet P/2010 A2 et de lever l'ambiguïté sur sa nature de comète ou d'astéroïde[104] ; l'analyse des images montrera qu'il s'agit d'un astéroïde traînant un nuage de poussières consécutif à une collision.
Rosetta survole le l'astéroïde (21) Lutèce. Pour préparer ce survol, une manœuvre de correction de trajectoire d'une durée de 188 secondes a été conduite le à 8 h 24 CEST, pour que Rosetta passe à 3 162 km de Lutèce et dispose d'un angle de vue adapté pour ses instruments[105]. Les instruments scientifiques ont été activés quelques jours avant le survol qui a lieu à une vitesse relative de 15 km/s[106]. Tous les instruments de l'orbiteur et deux spectromètres et le magnétomètre de l'atterrisseur Philae sont en marche durant cette rencontre[107]. Près de 400 photographies sont prises, dont certaines avec une définition qui atteint 1 pixel pour 60 m ; elles montrent un astéroïde de forme très allongée (longueur 130 km), couvert de cratères qui traduisent l'ancienneté de ce petit corps céleste, sans doute vieux de 4,5 milliards d'années[108]. Les photos montrent également des blocs sombres et des stries en surface rappelant celles de Phobos. Enfin, un cratère d'impact est partiellement comblé d'éboulis marbrés de vergetures qui pourraient avoir été produits par des tremblements de terre consécutifs à des collisions avec d'autres corps célestes.
Le , alors que la sonde spatiale s'éloigne toujours plus du Soleil, elle est volontairement mise en sommeil pour 31 mois[109] car ses panneaux solaires ne lui fournissent plus assez d'énergie. Durant son hibernation, les communications avec la Terre sont coupées, mais la sonde n'est pas complètement inactive durant cette phase : un logiciel particulièrement complexe ausculte régulièrement les équipements et les instruments scientifiques et s'assure que les composants de la sonde restent dans la plage de températures prévue en utilisant si nécessaire des résistances thermiques. Durant cette période, la trajectoire de Rosetta atteint son point le plus éloigné du Soleil et l'énergie solaire disponible ne représente plus que 4 % de ce dont disposait la sonde près de la Terre. La surface des panneaux solaires a été dimensionnée pour pouvoir maintenir dans ces conditions défavorables la sonde en état de fonctionnement : celle-ci a besoin de 390 watts durant sa mise en sommeil (résistances chauffantes, exécution des programmes de contrôle de l'état de la sonde)[110].
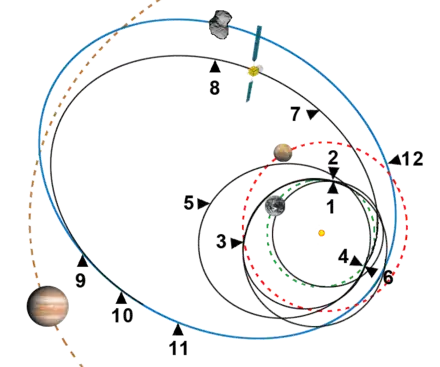 Trajectoire de Rosetta. |
Trajectoire de la sonde spatiale Rosetta Pour réaliser son rendez-vous avec la comète (trajectoire bleue), Rosetta (trajectoire noire) décrit quatre orbites autour du Soleil en utilisant l'assistance gravitationnelle de la Terre et de Mars pour relever progressivement son apogée. Principaux événements : | |
Réveil de la sonde spatiale (janvier-février)
.jpg.webp)
Le , la trajectoire de la sonde la rapproche de nouveau du Soleil : après s'en être éloignée de 800 millions de kilomètres, Rosetta se trouve désormais à 673 millions de km de celui-ci et à 9 millions de km de la comète. Après 31 mois d'hibernation[111], le rayonnement solaire est alors de nouveau suffisamment important pour que les panneaux solaires fournissent l'énergie nécessaire aux principaux systèmes, autorisant ainsi la réactivation de la sonde spatiale. Le rendez-vous avec la comète doit avoir lieu environ 7 mois plus tard, mais plusieurs manœuvres délicates doivent être réalisées auparavant. Le réveil de la sonde est un moment de tension pour les responsables du projet : pour économiser le peu d'énergie disponible durant les 31 mois écoulés, aucune information sur l'état de la sonde ou les événements qui auraient pu survenir à bord n'a été transmise aux opérateurs au sol. Après avoir réchauffé ses instruments de navigation puis, grâce à ses propulseurs, stoppé sa rotation et positionné ses panneaux solaires face au Soleil, Rosetta pointe son antenne grand gain vers la Terre[112]. Le premier signal témoignant du réveil de la sonde est reçu, avec un léger retard mais dans la fenêtre temporelle prévue, par les stations de Goldstone, en Californie et de Canberra, en Australie[113]. Les instruments de Rosetta sont activés les uns après les autres, puis testés. Le , la caméra à haute définition NAC d’Osiris fournit une première image dans laquelle on peut distinguer la comète que poursuit la sonde spatiale sous la forme d'un simple point lumineux. Le , l'atterrisseur Philae est réactivé à son tour et ses instruments commencent une séquence de tests. Progressivement, la comète grossit sur les images prises périodiquement par la caméra. À compter de fin , on commence à distinguer un nuage diffus de gaz et de poussière autour de la comète : celle-ci, en se rapprochant du Soleil, commence à se réchauffer, et des gaz s'évaporent de la surface, formant une queue caractéristique dont la longueur est évaluée à cette date à 1 300 km. Ce phénomène était prévu, mais à une distance plus faible du Soleil : 3 unités astronomiques alors que la comète se trouve encore à 4 UA. Selon Francis Rocard, responsable des programmes d'exploration du système solaire au CNES, les gaz qui s'échappent sont sans doute, à ce stade, du CO ou du CO2, plus volatils que la vapeur d'eau[114].
| Date | Distance de la comète |
Delta-V | Résultat | ||
|---|---|---|---|---|---|
| Delta-V effectif |
Vitesse relative par rapport à la comète |
Remarque | |||
| 7 mai | 1,92 million de km | 20 m/s | 20 m/s | 754 m/s | Test de la propulsion |
| 21 mai | 1,01 million de km | 290,89 m/s | 289,59 m/s | 463 m/s | Durée 7 heures 15 minutes, ergols consommés : 218 kg |
| 4 juin | 425 250 km | 269,5 m/s | 269,49 m/s | 192,1 m/s | Durée 6 heures 39 minutes, ergols consommés : 190 kg |
| 18 juin | 194 846 km | 90,76 m/s | 101,3 m/s | ||
| 2 juillet | 51 707 km | 58,80 m/s | 43 m/s | ||
| 9 juillet | 22 314 km | 24,91 m/s | 18,4 m/s | ||
| 16 juillet | 9 590 km | 10,65 m/s | 7,9 m/s | ||
| 23 juillet | 4 126 km | 4,62 m/s | ~1 m/s | ||
| 3 août | 3,2 m/s | 3,2 m/s | La trajectoire de Rosetta passe à 70 km de la comète au lieu de 200 km | ||
| 6 août | 100 km | 0,9 m/s | ~0 m/s | Début des manœuvres d'insertion en orbite | |
Manœuvres de rendez-vous (mai-juillet)
Avant son arrivée à proximité de la comète, Rosetta effectue huit manœuvres, entre mai et juillet, consistant à faire fonctionner sa propulsion, parfois durant plusieurs heures d'affilée, dans le but de faire passer le différentiel de vitesse de la sonde par rapport à la comète de 750 m/s à moins de 1 mètre par seconde, tout en plaçant l'engin spatial à proximité immédiate de la comète (environ 200 km). Les moteurs-fusées utilisés ont chacun une poussée de 10 newtons. Du fait d'une légère fuite dans le système de propulsion, détectée en 2006, les moteurs sont utilisés à une pression inférieure à celle prévue, ce qui dégrade légèrement leurs performances (la poussée obtenue à partir d'une quantité donnée de carburant). La sonde se rapproche progressivement de la comète, en suivant une trajectoire corrigée en permanence par le contrôle au sol, de manière à éviter la poussière laissée dans son sillage par Tchourioumov-Guérassimenko, tout en bénéficiant de bonnes conditions d'éclairage[116].
Premiers aperçus de la comète (juin/juillet)
| Date | Description |
|---|---|
| 6 août 2014 | Insertion sur une pseudo orbite (100 km) |
| 10 septembre 2014 | Insertion en orbite (30 km) |
| 1er octobre | Orbite de 19 km |
| 15 octobre | Orbite de 10 km |
| 31 octobre | L'orbiteur relève son orbite à 30 km |
| 12 novembre | Largage de Philae et atterrissage sur la comète |
| La comète passe au plus près du Soleil Pic d'activité de la comète | |
| Fin de la mission |

Alors qu'en avril, la comète Tchourioumov-Guérassimenko était accompagnée d'une coma indiquant un dégazage en cours, celle-ci disparaît par la suite. Le Rosetta n'est plus qu'à environ 86 000 km et la caméra OSIRIS réalise les premières photos, qui permettent de distinguer les contours du corps céleste. Celui-ci effectue une rotation sur lui-même toutes les 12,4 heures. Le , les photos plus détaillées montrent que la comète, de forme très irrégulière, est constituée d'un noyau double, dont les deux parties sont reliées par un étranglement. Plusieurs hypothèses sont émises au moment de cette découverte : la plus probable est que cette forme a été obtenue par l'agglomération de deux corps distincts au moment de la formation du système solaire. Selon d'autres théories cette forme pourrait résulter de la perte de matière associée au dégazage, ou découler des forces de gravité exercées par le Soleil ou Jupiter[117]. Le , la caméra grand angle, en utilisant une pose longue, parvient à montrer que la comète est entourée d'une chevelure de gaz, mais que celle-ci est encore extrêmement ténue[118].
L'insertion en orbite (août/septembre)
Les deux dernières manœuvres, exécutées les 3 et à 9 h 29 (cf. tableau ci-dessus), placent Rosetta sur une trajectoire qui la maintient à proximité de la comète. La comète a une forme très irrégulière, qui impose de longues investigations avant de permettre la mise en orbite. En effet, compte tenu de la faiblesse de l'attraction gravitationnelle de la comète, Rosetta doit circuler à environ 30 km du sol pour se trouver en orbite[alpha 4], et le maintien sur une orbite aussi basse peut entraîner rapidement une collision de la sonde et de la comète. Avant de placer Rosetta sur cette orbite, les contrôleurs au sol doivent d'abord connaître avec précision les caractéristiques du champ de gravité de la comète, la position de son centre de masse, et sa forme précise, ainsi que disposer de points de repères au sol, pour pouvoir rétablir à tout moment la position de la sonde. Pour recueillir ces informations, la sonde spatiale va tourner autour de la comète, à environ 100 km de sa surface. À cette distance, le champ gravitationnel est trop faible pour que la sonde spatiale se maintienne en orbite, et les contrôleurs utilisent la propulsion de Rosetta pour lui faire parcourir une pseudo orbite, de forme triangulaire, comportant trois segments de droite longs de 100 km, qui sont parcourus chacun en trois à quatre jours. À chaque fois que la sonde spatiale manœuvre pour entamer un nouveau segment, ses moteurs consomment quelques centaines de grammes d'ergols[119] - [120].
Au cours des deux mois suivants, la sonde spatiale va se rapprocher par paliers, à 50 puis 30 kilomètres. À cette dernière altitude, la force d'attraction gravitationnelle de la comète devient suffisamment importante pour maintenir la sonde spatiale sur une orbite elliptique[120]. La gravité est si faible que la sonde tourne autour de la comète à 10 cm/s (à titre de comparaison, la vitesse d'un satellite artificiel en orbite basse autour de la Terre est de 7,5 km/s). Le l'altitude est progressivement abaissée à 80 km, puis 50 km. À cette altitude, une deuxième pseudo orbite triangulaire est parcourue, entre le et le . Entre les 3 et , des observations scientifiques sont réalisées, avant l'insertion sur une orbite « naturelle » à 30 km d'altitude, qui a lieu le . Le plan orbital fait un angle de 60° par rapport à la direction du Soleil, et la sonde spatiale parcourt son orbite en 14 jours. La vitesse de la sonde autour de la comète, aux formes très irrégulières, doit être ajustée en permanence, pour éviter que Rosetta ne s'écrase ou qu'elle n'échappe à l'attraction de Tchourioumov-Guérassimenko. Le , la propulsion est utilisée pour placer Rosetta sur une orbite elliptique de 20 × 10 km, puis le sur une orbite circulaire de 10 × 10 km[121].
Sélection du site d'atterrissage
L'orbiteur cartographie le noyau de manière détaillée afin de permettre la sélection de 5 sites d'atterrissage potentiels. Ces sites sont des ellipses d'environ 1 km2 car il est impossible d'être plus précis étant donné les incertitudes liées au déroulement de l'atterrissage. Le site retenu doit remplir plusieurs conditions[122] - [123] - [124] - [125] - [126] :
- l'horizon doit être suffisamment dégagé pour permettre d'établir des communications régulières entre Philae et Rosetta ;
- le site doit bénéficier d'au moins 6 heures d'éclairage par rotation de la comète pour permettre la recharge des batteries de l'atterrisseur par ses panneaux solaires (tout en n’étant pas trop éclairé car cela pourrait causer une surchauffe) ;
- il doit bénéficier d'une période nocturne pour que les instruments puissent mesurer l'amplitude thermique jour-nuit ;
- il doit être relativement plat (déclivité faible). L'inclinaison maximale de Philae par rapport à l'horizontale doit être d'environ 30° ;
- il ne doit pas comporter de gros rochers ni crevasses ou pentes raides.
Le , après analyse des données acquises à 100 km de distance par Rosetta (images à haute définition, mesures de la température de surface de la comète, pression et densité du gaz autour du noyau, orientation de la comète vis-à-vis du Soleil, rotation, masse, gravité de surface), cinq sites d'atterrissage potentiels (A, B, C, I et J) sont retenus par le Landing Site Selection Group[127]. Le , l'ESA annonce que le site J qui est situé sur le petit lobe et forme une ellipse de 900 mètres de long sur 600 mètres de large, est choisi comme site d'atterrissage principal. Un deuxième site situé sur le grand lobe est également retenu au cas où les investigations détaillées sur le premier site ne seraient pas satisfaisantes. Le site d'atterrissage, baptisé Aguilkia à la suite d'un concours lancé par les agences allemande, française et italienne[alpha 5] - [128] - [129], présente des pentes généralement de moins de 30 degrés ce qui limite le risque de renversement de Philae et peut être atteint au prix d'une descente au sol relativement courte (7 heures) qui n'entame pas trop les réserves de la batterie primaire de l'atterrisseur[130].
 Réchauffée par le Soleil qui se rapproche, la comète éjecte des jets de gaz qui fusent entre les deux lobes.
Réchauffée par le Soleil qui se rapproche, la comète éjecte des jets de gaz qui fusent entre les deux lobes..jpg.webp) Photo prise depuis une altitude de 10 km.
Photo prise depuis une altitude de 10 km.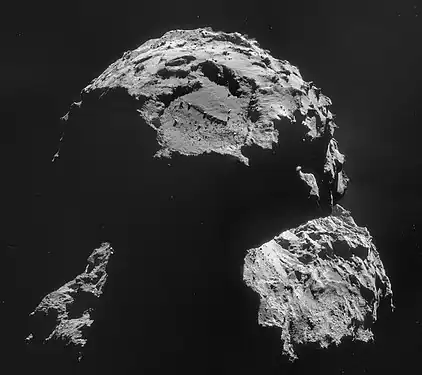 Algikia, le site prévu pour l'atterrissage de Philae se situe à l'extrémité du petit lobe au milieu d'une région assez plate (sur la photo, en haut au centre).
Algikia, le site prévu pour l'atterrissage de Philae se situe à l'extrémité du petit lobe au milieu d'une région assez plate (sur la photo, en haut au centre).
Atterrissage de Philae (2014-2015)

.jpg.webp)
L'atterrisseur Philae est éjecté à la vitesse adéquate par son vaisseau le à 10 h 5, et tombe 7 heures et 2 minutes plus tard sur le sol de la comète, où il arrive avec une vitesse d'environ 1 m/s. L’atterrissage est réussi, bien que non conforme aux prévisions. L'atterrisseur ne devait pas rebondir, mais s'ancrer grâce à différents mécanismes. Une série d'observations préprogrammées est alors exécutée par ses instruments scientifiques, au cours des 56 premières heures d'autonomie garanties par sa batterie principale. S'il survit, et en fonction des premiers résultats, d'autres observations définies par les opérateurs à Terre doivent être réalisées (analyses des propriétés du sol, du noyau de la comète, de son atmosphère) et, si possible, au-delà (observations à l'approche du Soleil : jets…). L'orbiteur de son côté joue un rôle de relais de télécommunications entre Philae et la Terre et réalise les observations avec ses propres instruments, en accompagnant la comète dans sa course autour du Soleil. Celles-ci se poursuivent alors que la comète atteint le point de son orbite le plus proche du Soleil (), qui devrait se traduire par un pic de dégazage, et s'achèvent le .
Descente de Philae vers le sol de la comète
La propulsion de Rosetta est utilisée à deux reprises, les 27 et , pour relever l'orbite de 10 à 30 km, afin de se placer en position de larguer Philae. Le à 8 h 3 (heure de Paris soit UTC+1), deux heures avant la séparation de Philae, les moteurs de la sonde spatiale sont mis à contribution pour placer celle-ci sur une orbite hyperbolique qui la fait plonger vers la comète, en la faisant passer 5 km en avant de son centre, dans le but de lancer l'atterrisseur, dépourvu de propulsion, dans le bon axe. Si cette manœuvre avait été effectuée à moins de 30 km, il y aurait eu un risque de collision de Rosetta avec la comète, tandis qu'un largage à une plus grande distance augmentait le cercle d'incertitude de la zone d'atterrissage. Les instruments de Philae sont activés les uns après les autres. L'ordinateur de Philae, qui rencontre des problèmes, est relancé, et les capteurs indiquent que le système propulsif à gaz froid n'est pas opérationnel, mais les responsables de la mission décident de s'en tenir au plan initial. À 9 h 35, l'atterrisseur se détache de son vaisseau mère avec une vitesse relative de 0,187 m/s (0,67 km/h), et entame sa descente, d'une durée de 7 heures, vers le sol de la comète sur sa seule inertie. La descente de l'atterrisseur Philae vers le sol de la comète se fait de manière complètement automatique compte tenu du délai des communications, 28 minutes et 20 secondes ; la confirmation de la séparation n'arrive ainsi sur Terre qu'à 10 h 3. L'atterrisseur ne dispose d'aucun système de propulsion lui permettant de corriger sa trajectoire. La précision de l'atterrissage dépend donc de la bonne connaissance de la position et du déplacement de Rosetta au moment du largage, ainsi que de la précision de l'orientation de la poussée exercée au moment de la séparation. L'écart, aussi négligeable soit-il, par rapport à la trajectoire idéale que devrait suivre Philae, s'amplifie avec la distance parcourue par l'atterrisseur jusqu'au sol. La roue de réaction de Philae est utilisée pour mettre l'engin spatial en rotation et ainsi stabiliser son orientation et combattre l'effet d'éventuels jets de gaz. Dix minutes après la séparation, l'atterrisseur déploie son train d'atterrissage tripode et ses antennes. Trente minutes plus tard, le vaisseau-mère Rosetta, qui ne se trouve plus qu'à environ 20 km de la comète, effectue une manœuvre pour éviter la collision, et se replacer sur une orbite qui doit lui permettre d'avoir en visibilité le site d'atterrissage au moment où Philae doit s'y poser. Durant la descente de l'atterrisseur, ses instruments ROMAP, CONSERT et SESAME effectuent des mesures respectivement du magnétisme, de la distance entre le sol et l'atterrisseur et des vibrations. Quarante minutes avant l'atterrissage, la caméra ROLIS réalise des prises de vue rapprochées du site d'atterrissage[131] - [132] - [126].
Atterrissage de Philae (12 novembre)
Au moment de l'atterrissage de Philae, la comète se situe à près de 650 millions de kilomètres de la Terre et navigue à plus de 135 000 km/h. Le dégazage déclenché par la proximité du Soleil, qui pourrait compromettre les opérations au sol, devrait être encore réduit à cette distance du Soleil (environ 400 millions de km). Le vers 16 h 34 (±40 min) heure française (UTC + 1), soit sept heures après la séparation, Philae se pose à la surface de la comète à une vitesse d'environ 0,95 m/s (environ 3 km/h) ; la confirmation de l'atterrissage devait arriver sur Terre 28 minutes plus tard, à 17 h 2 (±40 min). La confirmation a finalement lieu à 17 h 4. Le choc est absorbé par le train d'atterrissage et un système d’amortisseur interne. Ceux-ci sont conçus pour faire face à tout type de terrain : sol incliné, roche ou sol de faible densité.
À la surface de la comète, l'atterrisseur, d'une masse de 100 kg, ne pèse que l'équivalent d'1 gramme à la surface de la Terre, aussi plusieurs dispositifs sont utilisés pour empêcher Philae de rebondir et de repartir dans l'espace. Dès que l'atterrisseur est posé, le propulseur à gaz froid (dont la tuyère débouche au sommet de Philae) devait être déclenché pour plaquer Philae contre le sol, mais il ne fonctionne pas. Deux harpons placés sous le corps de l'atterrisseur devaient être tirés pour assurer son ancrage, mais leur déclenchement n'a pas non plus eu lieu ; les experts cherchent l'origine de cette faille technique. De longues vis logées au niveau des trois pieds de Philae tournent et s'enfoncent dans le sol en quelques minutes. Ces deux derniers dispositifs sont également nécessaires pour permettre de réaliser les forages ultérieurs. La probabilité de succès de l'atterrissage avait été évaluée à 75 % par les responsables de la mission, quelques jours auparavant[133] - [132].
L'atterrissage a lieu avec une très bonne précision évaluée à quelques dizaines de mètres mais les harpons qui devaient ancrer Philae au sol ne fonctionnent pas. Du fait de la faible gravité, l'atterrisseur rebondit jusqu'à une altitude évaluée à 1 km et effectue un premier vol plané d'une durée de 2 heures avant de toucher le sol et de rebondir une seconde fois pour une durée de quelques minutes. Le second rebond s'achève contre une paroi. D'après les images fournies par les caméras Civae, l'atterrisseur est dans une position inclinée (un des trois pieds se trouve au-dessus du sol) et une partie des panneaux solaires ne peut pas être éclairée par le Soleil. Le site de l'atterrissage final se trouve sans doute à plus d'un kilomètre du lieu visé[134].

Opérations au sol (12 au 15 novembre)
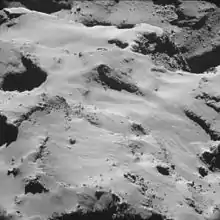
Une séquence d'observations préprogrammées devait être exécutée par les instruments scientifiques de Philae durant les 54 premières heures du séjour sur le sol. L'objectif de cette phase est de recueillir les données permettant de remplir les principaux objectifs assignés à la mission avant l'épuisement de la batterie primaire. Mais sa réalisation est en partie compromise par les circonstances de l'atterrissage. Les contrôleurs au sol décident après celui-ci de reporter dans l'immédiat les observations impliquant des déplacements mécaniques qui pourraient modifier la position peut-être précaire de Philae[134]. Les caméras miniatures CIVA réalisent un panoramique à 360° du site d'atterrissage qui révèle que l'atterrisseur se trouve sur une paroi qui masque la plupart du temps le Soleil. Les panneaux solaires de Philae ne disposent que de 1,5 heure d'ensoleillement à chaque rotation de la comète sur elle-même (durée 12,4 h). De plus l'atterrisseur ne repose pas horizontalement sur le sol et ses panneaux solaires mal orientés fournissent peu d'énergie lorsqu'ils sont éclairés. Les photos montrent un sol qui semble dur et rocheux très différent de ce qui était attendu. Les différents instruments passifs recueillent dans les heures suivantes leurs données[135]. SESAME réalise un sondage électrique et acoustique du sol et mesure l'impact des poussières générées par l'activité de la comète. ROMAP étudie l'environnement magnétique et le plasma local ainsi que l'influence du vent solaire. Enfin CONSERT émet et reçoit des ondes radio qui traversent le noyau avant d'être émises ou reçues par un instrument analogue à bord de l'orbiteur, permettant de déterminer la structure et la composition du cœur de la comète. La caméra ROLIS effectue une photo du sol sous l'atterrisseur, dans 4 bandes spectrales, pour permettre l'étude de sa structure. Les données recueillies sont transmises à l'orbiteur à l'aide du petit émetteur radio de l'atterrisseur (1 W) lorsque Philae est survolé par celui-ci, puis sont relayées jusqu'au centre de contrôle à Terre en assurant éventuellement un stockage provisoire pour attendre les moments favorables à une liaison radio[136] - [123] - [137] - [132] - [138].
Dans la nuit du 13 au 14 novembre, les instruments MUPUS (mesure des propriétés thermiques et physiques de la couche superficielle du sol) et APXS (analyse des éléments présents en surface) qui comportent des parties mobiles sont activés. Le , Philae ne dispose plus que d'une journée d'énergie mais a rempli, selon les scientifiques, environ 80 % de ses objectifs. L'instrument de forage SD2 est alors activé et prélève une carotte du sol de la comète (quelques mm3) qui est analysée par le mini-laboratoires COSAC qui détermine la composition isotopique et moléculaire ainsi que la chiralité des échantillons de sol. Les opérateurs décident de ne pas faire fonctionner PTOLEMY qui consomme trop d'énergie[133] - [139]. Dans la nuit du 14 au 15 novembre, l'orbiteur reprend contact avec Philae qu'il survole à nouveau. L'atterrisseur parvient à transmettre les données scientifiques recueillies par les instruments ROLIS, COSAC, PTOLEMY (qui a été activé dans un mode rapide) et CONSERT. Le corps de Philae est réorienté de 35° et relevé de 4 cm de manière à accroitre la quantité d'énergie reçue. Après une heure de communications, la charge de la batterie primaire non rechargeable est épuisée et l'atterrisseur entre en hibernation. Sa localisation à la surface de la comète reste à ce moment toujours inconnue et les recherches se poursuivent en s'aidant des photos prises par la caméra Osiris embarquée à bord de l'orbiteur[140] - [141].
Les premiers résultats sont fournis dans les jours qui suivent l'atterrissage. L'instrument MUPUS indique que la température à 1,5 mètre de la surface est de −170 °C. La résistance rencontrée par la sonde de cet instrument qui devait être enfoncée dans le sol permet d'en déduire que sa dureté est comparable à celle de la glace alors que les scientifiques s'attendaient à un sol mou. Les mesures des accéléromètres de SESAME prises au moment des impacts confirment cette indication. Les premiers résultats de COSAC semblent indiquer que la comète dégaze des composés organiques[142].
Mise en sommeil de Philae
Compte tenu de la position de Philae sur le sol de la comète, ses panneaux solaires, qui peuvent fournir au maximum (9 watts), risquent de ne pas fournir suffisamment d'énergie pour permettre la phase d'étude au sol, longue de plusieurs mois, prévue initialement. Il existe un espoir que, grâce au rapprochement progressif du Soleil, l'atterrisseur puisse être réactivé, malgré la faible durée durant laquelle ses panneaux solaires sont éclairés. Toutefois les mesures de production d'énergie par les panneaux solaires, réalisées avant la réorientation de Philae, n'incitent pas à l'optimisme: sur une orbite de 12,4 heures, les panneaux produiraient environ 3 à 4 watts-heures durant les 90 minutes d'ensoleillement: moins de 1 watt en moyenne durant cette période, sauf durant 20 minutes au cours desquelles il y aurait un pic de production de 3 à 4 watts. Or, il faut 5,1 watts pour que le système informatique de Philae démarre, donc cette puissance est insuffisante dans la configuration ci-dessus. Il faut par ailleurs disposer de 50 à 60 W.h sur une journée pour porter la température à 0 °C et commencer à accumuler un peu d'énergie dans la batterie. La reprise d'activité de Philae dans les mois à venir ne pourra être que limitée, même en tenant compte de l'augmentation de l'efficacité des panneaux solaires, liée à la réorientation de Philae et d'un Soleil de plus en plus proche[143].
Les mesures, qui devaient être réalisées par les instruments de Philae après la première phase, devaient être choisies par l'équipe scientifique, en fonction des premiers résultats et du contexte. Il s'agissait d'étudier l'évolution des émissions des jets de gaz et de poussière et des phénomènes induits, liée au cycle jour/nuit, d'analyser des échantillons du sol prélevés sur d'autres emplacements (le corps de l'atterrisseur peut pivoter), et la poursuite des sondages du noyau à l'aide de CONSERT. La comète se rapproche progressivement du Soleil, modifiant le flux thermique que subit l'atterrisseur. La température interne pourrait atteindre des valeurs trop élevées pour que l'électronique de Philae puisse continuer à fonctionner[144] - [126].
Réveil de Philae
L'exposition croissante des panneaux solaires de Philae à la lumière du Soleil, liée au déplacement de la comète (celle-ci se rapproche du Soleil et le changement de saisons devient plus favorable), permet finalement à l'atterrisseur de reprendre contact avec l'orbiteur Rosetta, le en fin de journée. Philae s'est sans doute réveillé depuis longtemps (il lui suffit de disposer de 5,5 watts), et que sa température soit supérieure à −45 °C, mais il doit disposer de 24 watts pour émettre. Cette première session de communications est très courte (85 secondes). Elle est suivie de 3 communications le lendemain, encore plus brèves (moins de 10 secondes), du fait sans doute d'une mauvaise géométrie. L'atterrisseur indique que sa température interne est satisfaisante (−36 °C au lever du Soleil), ainsi que celle de sa batterie (0 °C), et qu'il a stocké un grand volume de données depuis son réveil. Quatre des panneaux solaires (1, 2, 3 et 6) sont éclairés lorsque le Soleil est visible, et fonctionnent à leur puissance optimale, ce qui signifie qu'ils n'ont pas été recouverts de poussière par les éjections de matière en cours sur la comète. Les équipes chargées de la mission doivent localiser la position exacte du site de Philae, qui devrait se situer dans une ellipse de 160 × 16 m, et déterminer quels instruments activer, compte tenu de la quantité d'énergie limitée dont Philae dispose[145] - [146] - [147].
Mais les tentatives de contact ultérieures se révèlent infructueuses. Plusieurs explications sont avancées. La plus probable est que les antennes de Philae sont mal orientées, et que la sonde Rosetta, qui a dû s'écarter de la comète de plus en plus active, pour éviter que son système d'orientation ne soit aveuglé par les jets de gaz, ne parvient pas à percevoir le signal affaibli.
Activités prévues
Environ 20 % des objectifs de l'atterrisseur n'ont pas été remplis, à la suite de l'arrêt de l'activité de Philae en novembre: il s'agit des mesures de la surface à l'aide de l'instrument APXS, et de l'analyse d'un échantillon du sol, obtenu via SD2, par les mini laboratoires embarqués COSAC et Ptolemy. Mais les premières activités planifiées seront celles qui demandent le moins d'énergie, les moins risquées et celles qui ne nécessitent pas de modifier la position de l'atterrisseur, à savoir :
- mesure de la permittivité du sol, à l'aide de SESAME PP ;
- mesure du champ magnétique par ROMAP ;
- cartographie thermique, à l'aide de MUPUS ;
puis
- sondage de l'intérieur de la comète avec CONSERT ;
- prises d'images panoramiques avec ÇIVA-P, et d'images sous l'atterrisseur avec ROLUS ;
- mesure des impacts liés aux retombées de poussière, à l'aide de SESAME DIM ;
- mesure des propriétés acoustiques du sol, à l'aide de CASSE ;
- analyse de la composition de l'atmosphère, à l'aide de COSAC et Ptolemy.
Les activités prioritaires (analyse d'échantillon du sol et APXS) sont repoussées au mois de juillet, et doivent faire l'objet d'études, car elles nécessitent sans doute de déplacer l'atterrisseur. Dans les mois qui viennent, il sera difficile pour l'orbiteur de s'approcher de la comète, car les éjections de poussière entraînent désormais fréquemment une perte d'orientation de l'orbiteur (les viseurs d'étoiles qui sont utilisés sont trompés par la poussière), et les responsables de la navigation de l'engin spatial ont défini une trajectoire qui ne s'approche jamais à moins de 180 km de la comète. Ces mesures limitent la durée des communications, et ne permettent pas d'établir avec précision la localisation exacte de Philae[148].
Deuxième partie de la mission (novembre 2014 - août 2016)
L'orbiteur, de son côté, poursuit ses observations, alors que la comète s'approche du Soleil et devient de plus en plus active : Rosetta peut ainsi étudier le processus d'intensification du phénomène de dégazage qui caractérise cette période particulière de la vie d'une comète. Mais cette activité croissante constitue un danger pour la sonde spatiale, et à compter de , celle-ci est maintenue sur une trajectoire qui passe à une centaine de kilomètres de la comète. À cette distance, Rosetta n'est plus sous l'influence du champ gravitationnel de la comète, et elle décrit de longs segments de droite entrecoupés par de brèves poussées de ses moteurs pour l'orienter dans une nouvelle direction. Le un passage à basse altitude (6 km) est effectué, pour mesurer avec précision des propriétés de la surface, sous des angles d'éclairage variés[149]. Un deuxième passage à faible distance (14 km) est effectué le , au cours duquel les viseurs d'étoiles, trompés par l'abondance des grains de poussière, ne parviennent plus à fournir des indications fiable au système de contrôle d'orientation. L'antenne n'est plus pointée sur la Terre, et la sonde spatiale passe automatiquement en mode sauvegarde. Le temps que les opérateurs au sol parviennent à remettre Rosetta en ordre de marche, celle-ci qui a poursuivi sa trajectoire sur sa lancée, s'est éloignée de 400 km de la comète. Elle n'est ramenée sur une trajectoire normale(à 140 km de la comète) que le , et il faut plusieurs jours supplémentaires pour que les instruments scientifiques reprennent leur collectes de données[150]
Le périhélie est atteint le , alors que la comète se situe à 189,5 millions de km du Soleil et correspond au pic de l'activité cométaire[133]. Le , peu avant d'atteindre ce point de l'orbite, la caméra effectue une séquence de photos d'un jet de gaz puissant (plus de 10 m/s) et bref (moins de 18 minutes). Les instruments de la sonde spatiale détectent son influence sur le vent solaire, qui est bloqué par les gaz éjectés, repoussant le champ magnétique de près de 186 km du noyau de la comète[151]
Fin 2015, l'activité de la comète, qui s'éloigne rapidement du Soleil, se réduit progressivement. L'orbite de la sonde spatiale, qui était d'environ 300 km jusque-là, est abaissée à compter d' et Rosetta se place sur une orbite d'une dizaine de kilomètres début . Fin mars, la sonde s'éloigne de nouveau jusqu'à environ 1 000 km du noyau de la comète, pour étudier la queue de celle-ci, avant de revenir à quelques dizaines de kilomètres de distance[152]. En , la mission, dont la fin était prévue en , est prolongée jusqu'en [153].
Fin de mission (septembre 2016)
Le , une photo de la surface, prise par la caméra Osiris à une altitude de 2 700 mètres, permet de découvrir l'endroit où l'atterrisseur Philae se situe. Celui-ci est coincé dans une faille, ce qui explique, à la fois, les difficultés de repérage, et l'échec des tentatives de contact radio. L'énergie solaire disponible n'est plus suffisante pour réactiver Philae, mais la connaissance de la position de Philae est importante, car elle fournit le contexte des données scientifiques recueillies, notamment, par l'instrument CONSERT[154] - [155].
Les responsables de la mission choisissent de mettre fin à la mission le , pour plusieurs raisons: la sonde spatiale, qui accompagne la comète sur son orbite, s'éloigne de plus en plus du Soleil, et l'énergie produite par ses panneaux solaires ne lui permet plus de fonctionner normalement. Faute d'énergie, elle va devoir entrer en hibernation, comme en , jusqu'au retour de la comète à proximité du Soleil. Mais cette fois, son orbite suit exactement celle de la comète, ce qui l'éloigne encore plus du Soleil que lors de sa première mise en veille. L'énergie disponible à l'aphélie ne sera pas suffisante pour faire fonctionner les résistances chauffantes, qui protègent du froid les parties les plus délicates de la sonde spatiale. Par ailleurs, la sonde, qui séjourne dans l'espace depuis 12 ans, est vieillissante[156] - [157].
Rosetta et Philae, désormais inertes, devraient accompagner la comète jusqu'à sa désintégration ou sa collision avec un autre corps céleste, à une date qui se situe sans doute très loin dans le futur. Reprenant le précédent de la plaque des sondes Pioneer, un disque en nickel inaltérable, sur lequel sont micro-gravés des textes rédigés dans un millier de langues, a été fixé à l'extérieur de l'orbiteur: ce disque fait partie du projet Rosetta, de la fondation américaine Long Now Foundation, dont l'objectif est de préserver la connaissance des langues menacées, en créant des « pierres de Rosette » destinées à nos lointains descendants[158] - [159].
Déroulement de l'atterrissage final (29-30 septembre)
La fin de la mission est planifiée pour le , car en les communications avec la Terre seront réduites à cause d'une conjonction solaire d'une durée d'un mois. Selon les plans arrêtés par l'agence spatiale, la propulsion de Rosetta est utilisée le , pour ralentir la sonde spatiale alors que celle-ci se trouve à environ 20 km de distance de la surface[160]. Cette manœuvre déclenche une chute, à une vitesse terminale de 90 cm/s soit 3,24 km/h. La sonde doit s'écraser dans la région de Ma'at, située sur la « tête » de la comète, à proximité immédiate de plusieurs puits naturels dont les parois présentent des structures grumeleuses de plusieurs mètres. Celles-ci pourraient être la signature des composants initiaux de la comète, qui ont fusionné au tout début de la formation du système solaire[161] - [157].
Durant sa descente vers son objectif, qui dure environ 14 heures, la sonde spatiale prend des photos avec ses caméras et effectue des mesures des propriétés de gaz, de la poussière cométaire ainsi que du plasma. Les autres instruments sont éteints, pour réduire la consommation électrique. La trajectoire retenue permet la transmission des données en temps réel vers la Terre. La sonde spatiale entame cette descente depuis une altitude d'environ 19 km, le à 20 h 50 UTC[162], et atteint le sol le vers 11 h 20 UTC. Le centre de contrôle de l'ESA met officiellement fin à la mission, à 11 h 19 UTC[163] - [162]. Compte tenu des différentes sources de perturbation (irrégularités du champ de gravité, jets de gaz…), la sonde spatiale devrait s'être posée en un point situé dans une ellipse de 700 × 500 mètres, centrée sur la zone visée. Rosetta n'est pas conçue pour se poser, et il est probable que ses longs panneaux solaires (32 mètres d'envergure) seront endommagés au moment du contact. Cependant, ils serviront d'amortisseurs qui éviteront à la sonde de rebondir comme Philae. Immédiatement après la prise de contact, une séquence automatique s’exécutera pour arrêter les principaux systèmes de la sonde spatiale, en particulier l'émetteur radio, afin de libérer définitivement sa fréquence pour d'autres missions spatiales, conformément à la réglementation. Aucune réactivation ultérieure de Rosetta ne sera possible[157].
Résultats scientifiques
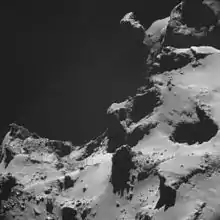
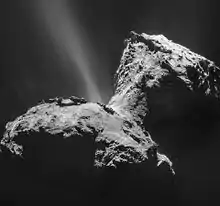
À compter de la mise en orbite autour de la comète Tchourioumov-Guérassimenko, les instruments de la sonde spatiale ont permis d'accumuler un grand nombre d'informations sur les caractéristiques de la comète. À la fin de la mission en , les équipes scientifiques n'ont encore exploité qu'une faible fraction de ces données et de nouveaux résultats devraient être publiés durant de nombreuses années. Les résultats déjà disponibles en ont permis de modifier de manière importante notre connaissance des comètes et de manière plus générale fourni des indices importants sur la formation du système solaire[164] - [165]. Parmi les principaux résultats[166] :
- la forme de la comète a surpris tous les scientifiques et résulte sans doute de l'agrégation de deux corps à très faible vitesse au tout début de la formation du système solaire ;
- cette forme a une influence déterminante sur les saisons, les déplacements de poussière à la surface de la comète ainsi que sur la densité et la composition de l'atmosphère (coma) de la comète ;
- les gaz s'échappant du noyau de la comète ont une composition inattendue ;
- tous les indices recueillis donnent à penser que la comète s'est formée dans une région particulièrement froide de la nébuleuse qui a donné naissance au système solaire il y a 4,5 milliards d'années ;
- l'hypothèse selon laquelle l'eau présente sur Terre a été apportée par des comètes n'a pas été confirmée par les analyses ;
- par contre, la comète contient bien les éléments qui auraient pu contribuer à la formation de la vie sur Terre. On y a trouvé notamment un acide aminé, la glycine, ainsi que du phosphore qui est un composant essentiel de l'ADN. De nombreux composés organiques ont été également détectés ;
- la comète semble bien avoir préservé les composants à l'origine du système solaire sans la transformation ultérieure subie dans les autres types de corps (planètes…).
Géométrie et caractéristiques physiques du noyau
Le noyau de la comète Tchourioumov-Guérassimenko est composé de deux lobes, reliés par une région plus étroite baptisée cou. Le plus grand lobe mesure 4,1 × 3,2 × 1,3 km, tandis que l'autre mesure 2,5 × 2,5 × 2,0 km. La masse de l'ensemble est de 1013 kg, soit 10 milliards de tonnes, et le volume est de 25 km3. La densité est comprise entre 0,4 et 0,5[165]. La température de la surface de la comète, mesurée en juillet par l'instrument VIRTIS-H, était évaluée à −70 °C. En octobre, elle était évaluée à −183 °C, contre environ 100 °C de plus à 1 km au-dessus de la surface de la comète. Cette chute de la température est due à l'expulsion des gaz, qui se traduit par un refroidissement adiabatique[167]. Comme presque toutes les comètes, Tchourioumov-Guérassimenko est de couleur sombre, avec un albédo (proportion de lumière réfléchie) très faible, compris entre 4 et 6 %, analogue à celui du charbon. Pour pouvoir malgré tout photographier la comète, alors que le Soleil ne fournit, en , que 10 % de l'éclairage disponible au niveau de l'orbite terrestre, le temps d'exposition est allongé jusqu'à la limite de la saturation des couleurs[168].
Les données fournies par l'instrument CONSERT, ainsi que par certains instruments de l'atterrisseur Philae, ont permis d'estimer que, globalement, la structure interne de la comète est très poreuse ; elle est constituée de vide à hauteur de 70 %, complété, principalement, par de la glace et de la poussière. Mais les mesures effectuées en surface par les instruments de Philae sur les deux zones où il s'est posé (la première fois brièvement, avant de rebondir) indiquent une porosité beaucoup moins importante (50 %). Pour réconcilier ces deux séries de données, les scientifiques émettent l'hypothèse d'un cœur pratiquement vide, entouré d'une croûte plus solide et plus dense. Les images de la surface semblent indiquer que la comète s'est formée à partir de corps ronds de quelques mètres de diamètre. Malheureusement, l'instrument CONSERT n'est pas à même de distinguer si des corps de cette taille forment la structure interne de la comète (sa limite inférieure de détection est de 5 à 10 mètres, et aucun corps de cette taille n'a été détecté). Les données fournies permettent uniquement de déduire que la structure interne de la comète est homogène, et que si elle est constituée d'un assemblage de corps, ceux-ci ont une taille inférieure à sa limite de détection. La découverte de la position de Philae, en , pourrait toutefois permettre d'affiner cette analyse[164].
Caractéristiques de la queue de la comète
Le volume d'eau éjecté par Tchourioumov-Guérassimenko était évalué à 0,3 litre par seconde en puis entre 1 et 5 litres par seconde en juillet-août[165]. En , l'activité de la comète est devenue suffisamment importante pour permettre la mesure de la composition des gaz éjectés par l'instrument VIRTIS-H. Les gaz émis sont principalement de la vapeur d'eau. Le dioxyde de carbone représente 4 % de la quantité de vapeur d'eau. Ce chiffre est bien inférieur aux 20 % mesurés pour la comète 103P/Hartley par la mission EPOXI en bien que les deux comètes fassent partie de la même famille[167]. L'instrument ROSINA a permis d'identifier de l'ammoniac, du méthane et du méthanol. Des traces de formol (CH2O), de sulfure d'hydrogène (H2S), d'acide cyanhydrique (HCN), de dioxyde de soufre (SO2) et de sulfure de carbone (CS2) ont été également détectées par le même instrument[169]. Les grains de poussière éjectés mesurent de quelques dizaines de micromètres jusqu'à 2 cm de diamètre[165].
Structure de la poussière
La poussière produite par la comète a été analysée à l'aide de trois instruments de Rosetta : GAIDA pour les particules de poussière d'une taille millimétrique, COSIMA pour celles ayant une taille comprise entre 10 et quelques centaines de microns, et MIDAS pour les particules les plus petites, de l'ordre du micron. Toutes ces mesures indiquent que la poussière est extrêmement fragile, et qu'elle se fragmente en une pluie de particules plus petites au moindre impact, même lorsque celui-ci se produit à très faible vitesse. Les particules ont une structure fractale à 5 dimensions, c'est-à-dire qu'elles sont des agglomérations d'agglomérations d'agglomérations d'agglomérations de particules. Il en résulte que certaines particules de poussière, les plus grosses, ont une densité inférieure à celle de l'air. Les plus petites ont, selon le cas, une structure de même type, ou peuvent être compactes. La composition chimique de la poussière est très variée et comprend des molécules d'hydrocarbures de masse atomique élevée, des silicates primitifs, et des sulfures de fer[164].
L'origine de l'eau des océans terrestres
L'une des hypothèses dominantes concernant les débuts de la Terre, il y a 4,6 milliards d'années, est que celle-ci a perdu à cette époque toute son eau, qui s'est évaporée à cause de la température très élevée engendrée par le processus de formation. Les océans, qui recouvrent les deux tiers de notre planète, ont donc dû se former par la suite, après le refroidissement de la planète, grâce à des apports externes. Pour déterminer l'origine de l'eau de la Terre, on compare son ratio deutérium/hydrogène avec celui de l'eau transportée par les autres types de corps célestes qui auraient pu contribuer à former les océans. Les comètes, constituées en grande partie de glace d'eau, sont de bonnes candidates. Mais les mesures du ratio effectuées sur onze comètes ont fourni des résultats qui ne confirment pas cette théorie. Une seule de ces comètes, 103P/Hartley 2, présente une valeur proche de celle de la Terre. Le ratio de l'eau de 67P/Churyumov–Gerasimenko a été mesuré un mois après l'arrivée de Rosetta à proximité de la comète, à l'aide de l'instrument ROSINA. La valeur obtenue est trois fois supérieure au ratio des océans terrestres. Ce résultat renforce la théorie selon laquelle les astéroïdes, dont le ratio est proche de celui de la Terre, seraient à l'origine de l'eau terrestre, bien que l'eau ne soit qu'un composant mineur de ces corps. La diversité des ratios mesurés sur les différentes comètes suggère, par ailleurs, que leur processus de formation est moins homogène que ce qui était théorisé jusque-là[170].
Évolution de la forme de la comète sous l'influence du Soleil
La comète Tchourioumov-Guérassimenko présente une forme particulière, avec deux lobes réunis par un cou étroit, qui pourrait, selon les premières hypothèses, résulter de l'assemblage de deux objets distincts. Lorsque la comète s'est rapprochée du Soleil, l'augmentation de température a suscité un accroissement des jets de gaz. Les photos prises par Rosetta ont permis de constater que, dans la phase initiale d'échauffement ( à ), ceux-ci ne se situaient pas majoritairement au niveau des parties les plus exposées au rayonnement solaire, compte tenu de la rotation de la comète, et donc les plus chaudes, mais au niveau du cou de la comète pourtant situé fréquemment à l'ombre. En modélisant l'évolution thermique du sol de la comète, une équipe de scientifiques, de l'Observatoire de la Côte d'Azur, a constaté que le cou était, par contre, la région qui subissait les changements les plus rapides de température, avec des variations pouvant atteindre plus de 30 kelvins par minute, contre quelques kelvins dans des zones mieux exposées à l'ensoleillement. Selon une théorie avancée par ces scientifiques, ces changements rapides de température favoriseraient la création de craquelures, qui mettraient à nu plus rapidement qu'ailleurs la partie volatile du sol de la comète. Ainsi la sublimation se ferait plus rapidement au niveau du col, et favoriserait le creusement de celui-ci. Cette étude ne se prononce pas sur l'incidence du phénomène sur la forme actuelle de la comète, mais ce processus pourrait expliquer la présence des deux lobes : une première cavité, créée par exemple par un cratère d'impact, se serait progressivement transformée en un col séparant la comète en deux sous-ensembles[171] - [172].
Formation de la comète 67P/C-G
L'étude détaillée de 67P/C-G a permis de déterminer que la comète était constituée de résidus quasiment intacts des matériaux accumulés durant la toute première phase de la formation du système solaire, et qu'elle pourrait donc nous aider à déterminer les propriétés de la nébuleuse qui a donné naissance au Soleil et aux planètes[173].
Les différentes données recueillies par les instruments de la sonde spatiale ont permis de rejeter le scénario alternatif de la formation de la comète. Selon celui-ci la comète serait un fragment formé par la collision d'objets transneptuniens. Les données recueillies montrent que 67P/C-G est un objet peu dense, avec une très forte porosité, et que chacun de ses deux lobes est constitué de strates visibles de matériaux, qui suggèrent que ceux-ci sont formés par des matériaux accumulés sur une longue période. La porosité particulièrement importante de la comète exclut l'hypothèse d'une collision violente, qui aurait compacté le matériau fragile formant 67P/C-G.
Les premières études ont montré que les deux lobes étaient à l'origine des objets distincts, mais leur réunion a dû se faire à des vitesses très faibles, car elles ont toutes deux conservé leurs caractéristiques d'origine. Les témoignages d'autres fusions, à des échelles plus petites, sont visibles, notamment dans la région de Bastet sur le lobe de petite taille, qui comporte trois additions sphériques. On observe dans les dépressions profondes visibles depuis l'espace, des surfaces baptisées par les scientifiques «chair de poule», qui pourraient refléter la manière dont les constituants primaires de la comète se sont agrégés. Selon les modèles de formation des comètes en vigueur, les vitesses de collision et de fusion ont varié durant le processus d'accrétion. La vitesse de collision était maximale lorsque les composants avaient un diamètre de quelques mètres, or la «chair de poule» semble montrer des objets plus compacts, dont le diamètre a cet ordre de grandeur. Par ailleurs, l'analyse de la composition de la comète montre que l'eau à sa surface n'a pratiquement subi aucune altération in situ, et que des matériaux très volatils, comme le monoxyde de carbone, l'azote et l'argon, sont présents à faible profondeur sous la surface. Tous ces indices amènent à considérer que la comète s'est formée dans un environnement extrêmement froid, et qu'elle n'a subi aucun processus d'échauffement tel que ceux qu'ont connu les objets transneptuniens[173].
Mesure de la quantité d'eau éjectée par la comète
Les données recueillies, principalement par le spectromètre ROSINA de Rosetta, mais également par d'autres instruments comme VIRTIS, ont permis de mesurer la quantité d'eau éjectée par la comète, du fait de l'échauffement découlant de sa proximité du Soleil. Lorsque la sonde spatiale a rejoint la comète en , alors que celle-ci se trouvait encore à 3,5 Unités Astronomiques (U.A.) du Soleil, la quantité d'eau émise était de quelques dizaines de tonnes par jour. Au point de son orbite le plus proche du Soleil (1,24 UA), atteint en , la comète éjectait 100 000 tonnes par jour, le pic se situant 3 semaines après le passage au périhélie. La quantité totale d'eau éjectée durant les deux ans d'observation est évaluée à 6,4 millions de tonnes. Outre l'eau, la comète a éjecté une grande quantité de poussière. D'après des mesures effectuées depuis la Terre, le ratio eau/poussière éjectées est resté pratiquement constant. La masse totale perdue, en prenant en compte les gaz et la poussière, représente peut-être 10 fois la masse d'eau, et se traduirait, si ces pertes étaient distribuées de manière uniforme à la surface de la comète, par une diminution de son diamètre de 2 à 4 mètres[174].
Retombées techniques
Plusieurs composants, développés pour Rosetta, ont été embarqués sur la sonde spatiale Mars Express, lancée en vers Mars. C'est le cas de l'ordinateur de bord, des transpondeurs, de l'antenne faible gain, des gyroscopes lasers, des accéléromètres des centrales de navigation inertielle et de l'articulation des panneaux solaires. Ces éléments représentent 80 % de la sonde[175]. Afin de réduire le coût de quatre autres missions, la plate-forme de Rosetta a été également réutilisée sur Venus Express, lancée vers Vénus en , sur BepiColombo, lancée en octobre 2018 à destination de Mercure, et sur Solar Orbiter, sonde destinée à l'étude du Soleil[176].
Évocations dans les arts
À la suite d'une communication à distance avec le cosmonaute néerlandais André Kuipers durant son séjour sur la Station spatiale internationale puis une rencontre de vive voix après son retour sur Terre en 2012, le compositeur grec Vangelis noue une coopération artistique avec l'Agence spatiale européenne (ESA) pour composer un album évoquant la mission Rosetta. Le compositeur visionne plusieurs heures de vidéos en lien avec le travail des membres de la mission pour alimenter son inspiration, puis se met au travail. Les premières compositions sont jouées en novembre 2014, le jour de l'atterrissage de Philae, à plusieurs endroits en Europe, dont le poste de contrôle de la mission de l'ESA en Allemagne[177]. L'ensemble des morceaux est édité sous la forme d'un album, Rosetta, en 2016.
Notes et références
Notes
- « Tchouri » en français, « Chury » en anglais.
- Elle fut notamment utilisée pendant les deux jours précédant le survol de (2867) Šteins.
- Selon Arianespace, la vitesse maximale du vent compatible avec un lancement est comprise entre 7,5 m/s et 9,5 m/s.
- À proximité de la comète, Rosetta se trouve à la fois sous l'influence gravitationnelle du Soleil et de la comète. La mise en orbite devient possible lorsque la distance par rapport à la comète est suffisamment réduite pour que son champ gravitationnel l'emporte. Cette distance dépend du rapport entre la masse du Soleil et de la comète ainsi que de la distance du Soleil. La région de l'espace où la gravité de l'objet local l'emporte, dite sphère de Hill, a un rayon de 30 km pour la comète contre, par exemple, 1,5 million de km autour de la Terre.
- Algikia est l'ile égyptienne située sur le Nil sur laquelle a été installée le temple d'Isis qui était à l'origine implanté sur l'ile de Philæ submergée par la mise en eau du barrage d'Assouan.
Références
- « La matière organique des comètes plus ancienne que le système solaire ? », sur CNRS, (consulté le )
- « No 14–2004 : ROSETTA ENTAME SON PÉRIPLE DE DIX ANS VERS LES ORIGINES DU SYSTÈME SOLAIRE », sur esa.int, .
- (en) « Solar System Exploration> Planets> Comets> Read More », NASA (consulté le ).
- (en) J. Krige, A. Russo et L. Sebesta, A History of the European Space Agency 1958- 1987 Volume II (SP-1235), ESA, (lire en ligne), p. 205-222.
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, Chichester, Springer Praxis, , 535 p. (ISBN 978-0-387-78904-0), p. 115-117.
- Ulivi 2014, p. 6.
- Ulivi 2014, p. 6-7.
- Ulivi 2014, p. 8-12.
- « L'atterrisseur de Rosetta, s'appellera Philae », sur futura-sciences.com, (consulté le ).
- (en) « No bugs please, this is a clean planet! », sur esa.int, (consulté le ).
- « Quand Rosetta rencontre Sowa et Otawara… », sur cnrs.fr, (consulté le ).
- « Rosetta » [PDF], sur etoilepolaire.fr (consulté le ).
- (fr) Matthieu Durand, Ariane prive la sonde Rosetta de sa comète, LCI, 15 janvier 2003. Consulté le 18 mai 2010.
- « Evenements Atterrisseur ROSETTA », CNES, (consulté le ).
- Agence Science-Presse, « Une comète européenne », 26 février 2004. Consulté le 18 mai 2010.
- « Les chiffres clés de la mission Rosetta », sur Missions scientifiques du CNES (consulté le ).
- Ulivi 2014, p. 19-21.
- Sébastien Rouquette, Cahier de l'espace no 2 : Comètes : un rêve plus loin ! De Rosetta à nos origines, CNES, , 24 p. (lire en ligne), p. 7.
- « Les comètes : de quoi sont constituées les comètes ? », sur Observatoire de Paris (consulté le ).
- « Les comètes », CNRS (consulté le ).
- « Le nuage d'Oort », Astropolis (consulté le ).
- « Qu'est-ce qu'une comète ? »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), CNRS Observatoire de Besançon, .
- Sébastien Rouquette, Cahier de l'espace no 2 : Comètes : un rêve plus loin ! De Rosetta à nos origines, CNES, , 24 p. (lire en ligne).
- David Fossé, « Pour trouver le vivant, cherchons l'homochiralité », Ciel et espace, no 475, , p. 47 (ISSN 0373-9139).
- (en) « Rosetta », ESA (consulté le ).
- (en) « Comet 67P/Churyumov-Gerasimenko Facts », sur theskylive.com (consulté le ).
- Y. Brouet, A.C. Levasseur-Regourd, A.C. Encrenaz et S. Gulkis, « Mesures de la permittivité relative complexe de matériaux granulaires poreux, dans le cadre de la mission Rosetta », URSI-France, , p. 18-27 (ISSN 0376-4265, lire en ligne).
- (en) « 67P/Churyumov-Gerasimenko », ESA, (consulté le ).
- (en) Emily, « Measuring comet 67P/C-G », sur ESA Rosetta Blog, .
- (en) « 67P/Churyumov-Gerasimenko », sur NASA JPL Small-Body Database Browser (consulté le ).
- (en) « Rosetta's OSIRIS cameras reveal the nature of asteroid Steins », sur ESA Science, .
- (en) « 2867 Steins (1969 VC) », sur NASA JPL Small-Body Database Browser (consulté le ).
- (en) « 21 Lutetia », sur NASA JPL Small-Body Database Browser (consulté le ).
- (en) M. Pätzold et al., « Asteroid 21 Lutetia: Low Mass, High Density », Science, vol. 334, no 6055, , p. 491-492 (DOI 10.1126/science.1209389, lire en ligne).
- (en) « Giotto overview », ESA, (consulté le ).
- (en) William E. Lamie, « Case study: NASA's "Deep Impact" employs embedded systems to score bullseye 80 million miles away », Military Embedded Systems (consulté le ).
- (en) « The Rosetta orbiter », sur esa.int, (consulté le ).
- (en) Karl-Heinz Glassmeier, Hermann Boehnhardt, Detlee Koschny, Ekkehard Kührt et Ingo Richter, « The Rosetta mission: flying towards the origin of the solar system », Space Science Reviews, no 128, , p. 21 (lire en ligne).
- (en) « Rosetta », sur nssdc.gsfc.nasa.gov (consulté le ).
- (en) « Rosetta », sur EO Portal (ESA) (consulté le ).
- (en) « Long-distance communication », sur esa.int, (consulté le ).
- « Rosetta Europe's Comet Chaser » [PDF], sur esamultimedia.esa.int (consulté le ).
- (en) « New Louvers ensure that Rosetta is real cool », sur planck.esa.int, (consulté le ).
- p. 25 (en) Claude Berner et al., « Why Rosetta? » [PDF], sur esa.int, Agence spatiale européenne, esa bulletin 112 - november 2002 (consulté le ).
- (en) « Alice », sur esa.int, Agence spatiale européenne, (consulté le ).
- (en) « Instrument Information : Alice », sur starbrite.jpl.nasa.gov, NASA (consulté le ).
- Schulz 2008, p. 167-182.
- (en) ESA - Rosetta - CONCERT.
- La saga de la sonde Rosetta : Épisode IV Place Gre'net.
- Schulz 2008, p. 183-199.
- (en) « CONSERT », sur esa.int.
- Schulz 2008, p. 201-241.
- (en) « GIADA », sur esa.int.
- Schulz 2008, p. 23-260.
- (en) « MIDAS », sur esa.int.
- Schulz 2008, p. 261-290.
- (en) « MIRO », sur esa.int.
- Schulz 2008, p. 291-314.
- (en) « OSIRIS », sur esa.int.
- Schulz 2008, p. 315-381.
- (en) « ROSINA », sur esa.int.
- Schulz 2008, p. 485-536.
- (en) « RPC », sur esa.int.
- Schulz 2008, p. 383-484.
- (en) « RSI: Radio Science Investigation », sur sci.esa.int (consulté le ).
- Schulz 2008, p. 537-563.
- (en) « VIRTIS », sur esa.int.
- Schulz 2008, p. 565-587.
- Schulz 2008, p. 591-592.
- Schulz 2008, p. 596-597.
- Denis Moura, « L'art de se poser sur une comète », CNRS, .
- Schulz 2008, p. 593-594.
- Schulz 2008, p. 594-595.
- « Participations scientifiques à la charge utile de l'atterrisseur ROSETTA », CNES (consulté le ).
- Schulz 2008, p. 605-616.
- « Rosetta : 7 mini-caméras franco-suisses lorgnent la terre ce 13 novembre », sur esa.int, (consulté le ).
- Schulz 2008, p. 617-631.
- Schulz 2008, p. 633-650.
- Schulz 2008, p. 669-686.
- Schulz 2008, p. 651-667.
- Schulz 2008, p. 687-699.
- Schulz 2008, p. 701-718.
- Schulz 2008, p. 719-733.
- Schulz 2008, p. 735-764.
- (en) « New Norcia - DSA 1 », sur esa.int (consulté le ).
- (en) « Launch Information », sur sci.esa.int (consulté le ).
- « Deux survols d’astéroïdes au programme de Rosetta », sur esa.int, (consulté le ).
- Ulivi 2014, p. 21-23.
- (en) ESA, « Rosetta Earth Swingby media presentation 13.11.2009 », sur slideshare.net, , p. 18.
- (en) ESA, « Rosetta Earth swing-by two: Questions and Answers », sur esa.int, .
- (en) T. Morley, F. Budnik, ISTS 2006-d-52 : ROSETTA NAVIGATION AT ITS FIRST EARTH SWING-BY[PDF].
- Stéphane Fay, « Rosetta, la sonde qui nargue la gravité », Ciel et espace, no 479, , p. 53 (ISSN 0373-9139).
- Ulivi 2014, p. 23-25.
- « Rosetta Correctly Lined Up For Critical Mars Swingby », sur sciencedaily.com, (consulté le ).
- (en) « Rosetta Mars Swing-by », sur sci.esa.int, (consulté le ).
- « En bref : 2007 VN84, un astéroïde très humain ! », sur futura-sciences.com, (consulté le ).
- « Rosetta révèle la nature de l'astéroïde Steins », sur techno-science.net, .
- (en) Sylvain Lodiot, Andrea Accomazzo, Mathias Lauer, Trevor Morley et Paolo Ferri, « The first European asteroid "flyby" », ESA bulletin, no 137, , p. 68–74 (ISSN 0376-4265, lire en ligne).
- (en) Daniel Scuka, « Timings for today's trajectory correction manoeuvre »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), sur http://webservices.esa.int/blog/blog/5, (consulté le ).
- (en) « Rosetta bound for outer Solar System after final Earth swingby », sur esa.int, (consulté le ).
- (en) Daniel Scuka, « Mystery remains: Rosetta fails to observe swingby anomaly »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), sur http://webservices.esa.int/blog/blog/5, (consulté le ) : « For Rosetta's third and final Earth swingby, there was no anomaly. ».
- (en) « Rosetta No. 124 - Successful Earth swingby », ESA, (consulté le ).
- (en) « Status Report : No. 125 - Earth swingby clean-up manoeuvre », sur sci.esa.int, (consulté le ).
- Colin Snodgrass, Cecilia Tubiana, Jean-Baptiste Vincent, Holger Sierks, Stubbe Hviid, Richard Moissl, Hermann Boehnhardt, Cesare Barbieri et Detlef Koschny, « A collision in 2009 as the origin of the debris trail of asteroid P/2010 A2 », Nature, vol. 467, no 7317, , p. 814–816 (PMID 20944742, DOI 10.1038/nature09453).
- (en) Daniel Scuka, « Rosetta thruster burn to align probe with asteroid target »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), (consulté le ).
- (en) « No. 135 - Payload check-out 12 », sur sci.esa.int, (consulté le ).
- (en) « EVENEMENTS DE L'ATTERRISSEUR ROSETTA », sur CNES, .
- (en) « Rosetta triumphs at asteroid Lutetia », sur ESA, .
- (en) « Rosetta comet probe enters hibernation in deep space », sur esa.int, Agence spatiale européenne, (consulté le ).
- (en) Paolo Ferri, Andrea Accomazzo, Sylvain Lodiot, Armelle Hubault, Roberto Porta et Josè-Luis Pellon-Bailon, Preparing the Rosetta deep-space operations, , 8 p..
- (en) « Rosetta: 100 days to wake-up », sur esa.int, (consulté le ).
- (en) « How Rosetta wakes up from deep space hibernation », ESA, (consulté le ).
- (en)ESA's 'sleeping beauty' wakes up from deep space hibernation sur le site de l'ESA. Consulté le 20 janvier 2014.
- (en) « Événements de l'atterrisseur Rosetta », CNES Missions scientifiques, .
- (en) Emily Lakdawalla, « Rosetta update: Both "big burns" completed successfully », sur Planetary society, .
- (en) Daniel, « Thruster burn kicks off crucial series of manoeuvres », sur ESA Rosetta Blog, .
- (en) Emily, « The dual personality of comet 67P/C-G », sur ESA Rosetta Blog, .
- « Rosetta photographie la chevelure de sa comète », sur Missions scientifiques du CNES, .
- (en) Daniel, « What’s happening in Rosetta mission control today », sur ESA Rosetta Blog, .
- .
- (en) Daniel, « Down, down we go to 29 km – or lower? », sur ESA Rosetta Blog, .
- (en) Emily, « Updated comet shape model », sur ESA Rosetta Blog, .
- (en) « Comet rendezvous », ESA, (consulté le ).
- Sébastien Rouquette, Cahier de l'espace no 2 : Comètes : un rêve plus loin ! De Rosetta à nos origines, CNES, , 24 p. (lire en ligne), p. 21.
- « Le 6 août, Rosetta commencera sa mise en orbite autour de 67P », sur Missions scientifiques du CNES, .
- « La descente de Philae vers la comète », sur Missions scientifiques du CNES (consulté le ).
- (en) « Rosetta : Landing search narrows », sur esa.int.
- (en) Claudia, « Hello, Agilkia », Blog Rosetta ESA, .
- « Le site d'atterrissage de Philae s'appelle désormais Agilkia », CHES missions scientifiques, .
- « C'est le site “J” qui a été choisi pour l'atterrisseur de Rosetta », sur ESA, .
- (en) Daniel, « Rosetta lined up for lander delivery », Blog Rosetta ESA, .
- (en) Daniel, « Rosetta Rosetta and Philae landing timeline », Blog Rosetta ESA, .
- « Animation vidéo de la descente de Philae et de ses instruments », CNES, .
- « En « direct » de la surface de la comète », CNES, .
- « Décryptage du 1er panorama de CIVA », sur cnes.fr, .
- « FAQ Rosetta », CNES (consulté le ).
- « La sonde Rosetta en route vers la comète Tchourioumov-Guerassimenko » [PDF], sur lesia.obspm.fr, Lesia (consulté le ).
- Schulz 2008, p. 13-15.
- (en) Claudia, « How (and where) is Philae? », Blog Rosetta ESA, .
- (en) « Pioneering Philae completes main mission before hibernation », ESA, .
- (en) « Our lander’s asleep », Blog Rosetta ESA, .
- (en) Patrick Blau, « Play by Play: ESA's Comet Landing », sur Spaceflight101, .
- (en) William Harwood, « Loss of contact with Philae », Spaceflight Now, .
- (en) Emily, « Science with the lander – what to expect when Philae meets 67P », Blog Rosetta ESA, .
- (en) Patrick Blau, « Philae Comet Lander wakes up after long Hibernation », sur Spaceflight101, .
- (en) Emily, « Rosetta’s lander Philae wakes up from hibernation », Blog Rosetta ESA, .
- (en) Jonathan Amos, « Philae comet lander: The plucky robot is back », BBC, .
- (en) Emily Lakdawalla, « Philae is awake! What's next for the comet lander's scientific mission ? », sur Planetary society, .
- (en) Emily Lakdawalla, « Rosetta shifts from sedate circular orbits to swooping flybys », sur Planetary society, .
- (en) Emily Lakdawalla, « Rosetta update: Two close flybys of an increasingly active comet », sur Planetary society, .
- (en) Emily, « Comet’s firework display ahead of perihelion », sur Rosetta blog, Agence spatiale européenne, .
- (en) Emily, « CometWatch 4 April », sur blog ESA Rosetta, .
- « La mission Rosetta officiellement prolongée jusqu'en », sur lefigaro.fr, (consulté le ).
- Astronomie : la sonde « Rosetta » a retrouvé Philae, Hervé Morin, Le Monde, 5 septembre 2016.
- (en) Emily Lakdawalla, « Philae spotted on the surface of comet Churyumov-Gerasimenko », The Planetary Society, .
- (en) « Rosetta finale set for 30 september », sur esa.int (consulté le ).
- (en) « Rosetta’s grand finale – frequently asked questions » (consulté le ).
- (en) « The Rosetta project : disc », The Long Now Foundation, .
- (en) « Rosetta disk goes back to the future », ESA, .
- Espace : Rosetta se précipite vendredi sur la comète Tchouri, NouvelObs, publié le 28 septembre 2016.
- (en) Emily Lakdawalla, « Rosetta end-of-mission update », The Planetary Society, .
- « MISSION ACCOMPLIE : ROSETTA TERMINE SON VOYAGE PAR UNE DESCENTE MAGISTRALE VERS SA COMÈTE », sur esa.int, .
- (en) « Final Descent Image from Rosetta Spacecraft », sur nasa.gov.
- (en) Emily Lakdawalla, « Rosetta spacecraft may be dying, but Rosetta science will go on », sur Planetary society, .
- « 67P : les cotes de la comète », CNES missions scientifiques (consulté le ).
- (en) « Mission accomplie : Rosetta termine son voyage par une descente magistrale vers sa comète », ESA, .
- (en) Claudia, « →VIRTIS detects water and carbon dioxide in comet’s coma », Blog Rosetta ESA, .
- (en) Claudia Mignone, « Rosetta NAVCAM's Shades of Grey », sur Planetary society, .
- (en) Emily, « →The ‘perfume’ of 67P/C-G », Blog Rosetta ESA, .
- (en) « Rosetta fuels debate on origin of Earth’s oceans », sur sci.esa.int, Agence spatiale européenne, .
- (en) Emily Lakdawalla, « How the duck got its neck: Rapid temperature changes from self-shadowing may explain 67P's unusual activity and shape », sur Planetary society, .
- (en) Víctor Alí-Lagoa et al., « Rapid temperature changes and the early activity on comet 67P/Churyumov-Gerasimenko », The Astrophysical Journal Letters, vol. 810, no 2L22, , p. 1-5 (DOI 10.1088/2041-8205/810/2/L22, lire en ligne).
- (en) « How comets are born », sur sci.esa.int, Agence spatiale européenne, .
- (en) « Rosetta measures production of water at comet over two years », sur sci.esa.int, Agence spatiale européenne, .
- Philippe Labrot, « Mars Express », sur nirgal.net, (consulté le ).
- « Rosetta, en route vers Churyumov-Gerasimenko », sur jcboulay.free.fr (consulté le ).
- Livret de l'album Rosetta de Vangelis (Decca, 2016), p. 4-5.
{kind=link}
{kind=link}
Bibliographie
![]() : document utilisé comme source pour la rédaction de cet article.
: document utilisé comme source pour la rédaction de cet article.
- Déroulement du projet, description de la mission
- (en) Paolo Ulivi et David M. Harland, Robotic exploration of the solar system : Part 4 : the Modern Era 2004-2013, Springer Praxis, , 567 p. (ISBN 978-1-4614-4811-2)

- Sébastien Rouquette, Cahier de l'espace no 2 : Comètes : un rêve plus loin ! De Rosetta à nos origines, CNES, , 24 p. (lire en ligne)
- (en) Rita Schulz, Claudia J. Alexander, Hermann Boehnhardt et Karl-Heinz Glassmeier, ROSETTA : ESA's Mission to the Origin of the Solar System, Springer-Verlag New York, , 785 p. (ISBN 978-0-387-77517-3 et 0-387-77517-X)
- (en) Luigi Colangeli, Elena Mazotta Epifani et Pasquale Palumbo, The new Rosetta targets : Observations, Simulations, and Instrument Performances, Dordrecht, Springer-Verlag New York, , 315 p. (ISBN 1-4020-2572-6, lire en ligne)
- (en) Andrea Accomazzo, Sylvain Lodiot, Paolo Ferri, Armelle Hubault, Roberto Porta et Josè-Luis Pellon-Bailon, « The first Rosetta asteroïd flyby », Acta Astronautica, no 66, , p. 382 (ISSN 0094-5765, lire en ligne)
- Résultats scientifiques
- (en) B. J. R. Davidsson, H. Sierks, C. Marzari, M. Pajola, H. Rickman, M. F. A’Hearn et al., « The primordial nucleus of comet 67P/Churyumov-Gerasimenko », EDP Sciences, vol. A&A 592, no A63, , p. 30 (DOI 10.1051/0004-6361/201526968, lire en ligne)
Autres sources
- (en) « Site officiel scientifique de l'Agence spatiale européenne », sur sci.esa.int
- (en) « Blog officiel de la mission (Agence spatiale européenne) », sur blogs.esa.int
- « Pages Rosetta sur le site scientifique de l'agence spatiale française du CNES », sur smsc.cnes.fr
- (en) « Description détaillée sur le site EO Portal de l'Agence spatiale européenne », sur directory.eoportal.org
- (en) Fred Jansen, Matt Taylor, Andrea Accomazzo et Emily Baldwin, « Waking Rosetta », ESA Bulletin, no 156, , p. 18-27 (ISSN 0376-4265, lire en ligne)
Voir aussi
Articles connexes
- Comète
- Formation du système solaire
- Giotto. Première mission de l'ESA visant une comète
- Mission Deep Impact, une autre mission de sonde spatiale qui a eu pour objectif d'étudier la composition d'une comète
- Hayabusa, sonde japonaise chargée d'étudier un astéroïde
- Liste des sondes spatiales qui ont atterri sur d'autres corps célestes
Liens externes
- « Pages dédiées sur le site scientifique de l'agence spatiale française du CNES », sur smsc.cnes.fr
- Cnes : Mission Rosetta/Philae : le bilan
- (en) « Site scientifique de l'agence spatiale consacré à la sonde spatiale », sur sci.esa.int
- (en) « Blog de l'agence spatiale européenne consacré à la mission », sur blogs.esa.int
- « Brochure ESA : Rendez-vous avec une comète », sur esamultimedia.esa.int
- « Podcast consacré à la mission sur le site Ciel et Espace »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?)
- (en) « Le rendez-vous avec la comète 67P/Churyumov-Gerasimenko par la sonde Rosetta - Site officiel », sur rosetta.esa.int
- (en) « Where is Rosetta ? - Simulation 3D du voyage de la sonde vers la comète. », sur ESA Science.
- (en) « Archive stéréo-photographique de la sonde ROSETTA -OSIRIS- », sur CNES.
Vidéos
- (en) Historique de la mission (ESA)
- (en) Atterrissage de Philae et opérations au sol (ESA)
- (en) Ambition fiction sur les enjeux scientifiques de la mission (ESA)
- (en) Caractéristiques de Philae (DLR)
- L'Aventure Rosetta, aux origines de la vie, documentaire de 54 minutes de Jean-Christophe Ribot, 2015, coproduit par Arte
- L'odyssée Rosetta, 900 jours sur une comète, documentaire de 93 minutes de Jean-Christophe Ribot, 2017
- (en) theComet