Histoire du radar
L’histoire du radar est une branche de l'histoire de l'électronique qui devient un des fondements de la stratégie militaire du XXe siècle. L’idée de repérer un objet à distance, la télédétection, a commencé au début de ce siècle quand Christian Hülsmeyer applique les lois de l’électromagnétisme de Maxwell et utilise les ondes électromagnétiques découvertes par Hertz dans un précurseur du radar, le « Telemobiloskop » (Reichspatent Nr. 165546)[1]. Les années 1920 et 1930 verront plusieurs découvertes en électronique rendant possible le développement d’un système opérationnel, juste à temps pour la Seconde Guerre mondiale. Le radar a joué un rôle crucial dans le conflit, et a probablement eu une contribution plus importante pour la victoire des Alliés que la bombe atomique[2].

L’expérience acquise pendant le conflit par un grand nombre de chercheurs a permis d’élargir l’utilisation du radar à d’autres domaines que le militaire. On le retrouve directement ou indirectement aujourd’hui dans l’aviation civile, le contrôle maritime, la détection météorologique, les détecteurs de vitesse de nos routes et même en médecine.
Évolution d’une idée
« Le principe fondamental du radar appartient au patrimoine commun des physiciens : ce qui demeure en fin de compte au crédit réel des techniciens se mesure à la réalisation effective de matériels opérationnels. »
— Maurice Ponte[3]
Fondements physiques
La plus grande partie de la vie scientifique de James Clerk Maxwell, brillant scientifique britannique, a été consacrée à l'électricité. Sa plus grande contribution est le développement et la formulation mathématiques d’un ensemble de vingt équations différentielles à vingt variables, plus tard réduites aux quatre lois de l’électromagnétisme. Ces équations, désormais connues sous le nom d'équations de Maxwell, sont présentées la première fois à la Royal Society en 1864 et décrivent le comportement et les relations du champ électromagnétique ainsi que son interaction avec la matière. L'équation d'onde électromagnétique de Maxwell prévoit l'existence d'une onde associée aux oscillations des champs électriques et magnétiques, se déplaçant dans le vide.
Heinrich Rudolf Hertz prouve expérimentalement en 1884 que la lumière est une onde électromagnétique qui obéit à la théorie de Maxwell. À Karlsruhe, il utilise un oscillateur (dit oscillateur de Hertz, composé d'un éclateur agissant entre deux sphères creuses en laiton) et met en évidence l'existence d'autres ondes électromagnétiques, celles-là non visibles. Il démontra que ces nouvelles ondes étaient susceptibles elles aussi de se diffracter, de se réfracter et de se polariser. Le , il effectua la première liaison par faisceau hertzien entre un émetteur et un récepteur[4]. En 1888, il montre finalement que les ondes électromagnétiques sont réfléchies par les surfaces métalliques, ce qui ouvre la voie au radar.
Au début du XXe siècle, le développement de la radio et de la TSF (par Marconi, entre autres), donne lieu à celui des antennes. Celles-ci sont fondamentales dans l’invention du radar puisqu’il faut un émetteur et un récepteur.
Christian Hülsmeyer
Au début du XXe siècle, le trafic maritime est très important et les collisions entre navires ou avec des obstacles cachés par la brume sont communes. Plusieurs instruments sont en usage pour essayer d’éviter ces accidents, dont la corne de brume, mais un moyen direct de détection des obstacles est recherché. En 1904, Christian Hülsmeyer a assimilé les éléments de base formulés antérieurement et conçoit un appareil, le « Telemobiloskop », dont il donne une démonstration en Allemagne et aux Pays-Bas[1]. Son invention utilise un émetteur à éclateur pour produire une onde radio. Celle-ci est orientée directionnellement par une antenne multipolaire. L’onde frappant un obstacle métallique, comme un navire, était en partie réfléchie vers la source où deux antennes dipolaires servaient de récepteur qui sonnait une cloche lors de détection. Ce système pouvait repérer l’azimut approximatif des navires jusqu’à 3 kilomètres, sans pouvoir déterminer la distance. La même année, Hülsmeyer utilisa son « Telemobiloscope » au sommet d’une tour et fit un sondage vertical pour trouver l’angle d’élévation du retour maximal, ce qui donnait, par triangulation avec la courbure terrestre, la distance approximative du navire[5]. Le manque d’intérêt des autorités et des compagnies maritimes fit sombrer l’appareil dans l’oubli.
Nikola Tesla
En août 1917, Nikola Tesla proposa les fréquences et l’énergie nécessaire pour un système de repérage à distance des obstacles dans le périodique The Electrical Experimenter[6]. Il propose l’utilisation d’une onde entretenue pour repérer les objets, cette onde formant une onde stationnaire avec la réflexion par la cible lorsque la fréquence est ajustée convenablement (Radar à ondes entretenues). La fréquence utilisée permet alors de déterminer la distance de l’objet ou sa variation dans le temps permet de déduire la vitesse radiale de déplacement. Il propose comme alternative l’utilisation d’impulsions pour obtenir le même résultat. Tesla envisageait l’affichage des échos résultants sur un écran fluorescent, une idée reprise par le radar.
Développement des années 1920-1930
Des idées communes et une multiplicité d'histoires parallèles
Après le temps des précurseurs et de la genèse des idées inventives s'ouvre, à partir des années 1920 jusqu'à la Seconde Guerre mondiale, le temps des pionniers et des premières réalisations qui profitent des avancées de la radioélectricité suscitées par le développement spectaculaire de la TSF. Dans un premier temps, ce que l'on n'appelle pas encore « radar », mais, en français, « détecteur électromagnétique», consiste à détecter l'écho d'un système d'ondes électromagnétiques continues. On peut détecter une présence, mais le positionnement de l'obstacle n'est pas possible. À partir de 1934-1935, les ingénieurs ont appris à maitriser la technique d'émission et de réception d'impulsions brèves. La mesure du délai séparant l'émission et la réception permet alors de mesurer la position de l'objet détecté[7].
Au cours de cette période 1920-1940, les diverses équipes travaillent de façon relativement indépendante, si bien que les développements observés dans chaque pays connaissent chacun leur propre rythme et leur propre logique, et l'on est plus en présence d'une multiplicité d'histoires parallèles que d'une histoire commune. Par la suite, les historiens du radar des différents pays ont tendance à attribuer la paternité de telle ou telle avancée à leurs propres ressortissants[8].
L'application dominante est, jusqu'en 1935, l'aide à la navigation. Plutôt en retard jusqu'alors, les Britanniques sont les premiers à développer à partir de 1935 un réseau intégré de stations de détection aérienne couvrant l'ensemble de leurs côtes[9].
Allemagne
En Allemagne, Hans Hollmann et l'ingénieur militaire Kühnhold, spécialiste du sonar, travaillaient dans le domaine des micro-ondes pour la compagnie GEMA (Gesellschaft für Elektroakustische und Mechanische Apparate ou Société d'appareillages électro-acoustiques et mécaniques). En 1935, Hollman publia dans la revue Physics and Technic of Ultrashort Waves les résultats de ses recherches et les scientifiques du monde entier furent très intéressés par ses découvertes. Il y donnait des informations non seulement sur l’utilisation de ces ondes pour les télécommunications, mais également pour l’écholocation sur laquelle il avait travaillé avec Hans-Karl von Willisen.
En effet, à l’automne 1934, ils avaient construit un premier appareil similaire à celui de Hülsmeyer qui permettait, avec une onde de 50 cm, de détecter les navires jusqu’à 10 km, sans toutefois pouvoir évaluer leur distance. En 1935, ils utilisèrent un émetteur à impulsions qui leur permit de localiser le croiseur léger Königsberg à 8 km de distance, assez pour l’utiliser pour le tir au canon. Le même système permettait de suivre des avions volant à 500 mètres d’altitude à 28 km de distance[10].
Ces démonstrations intéressèrent cette fois le commandement militaire allemand, qui décida de construire un réseau de radars terrestres (Freya) et marins (Seetakt).
États-Unis

À l’automne 1922, Albert H. Taylor et Leo C. Young, du Naval Research Laboratory (NRL) aux États-Unis, effectuaient des essais de communication radio dans le fleuve Potomac. Ils remarquèrent que les bateaux en bois traversant la trajectoire de leur signal d’onde continu causaient des interférences, redécouvrant ainsi le même principe qu’Hülsmeyer. En 1930, Lawrence A. Hyland du NRL détecta le passage d’un avion à l’aide d’une interférence dans le signal d’une onde continue de 33 MHz (longueur d’onde d’environ 10 mètres). Ces deux expériences montraient la possibilité de détection mais ne fournissaient pas la position ni la vitesse de la cible.
Au début des années 1930, Taylor confia à un de ses ingénieurs, Robert M. Page, la tâche de développer un émetteur à impulsion et une antenne d’émission que lui et Young avait imaginé pour contourner ce problème[11]. Page construisit donc l’appareil et en l’essaya. Il utilisait une fréquence de 25 MHz avec une impulsion de 5 microsecondes. Il continua les essais en 1935 et le , Page fut capable de repérer un petit avion à 4 kilomètres de distance le long du Potomac. La fréquence utilisée nécessitait une large antenne afin d’avoir un faisceau suffisamment concentré dans la direction de sondage, ce qui le rendait impossible d’utilisation sur un navire ou un avion. En utilisant une fréquence de 80 MHz, puis 200 MHz, l'antenne fut réduite. Le radar CXAM qui en résulta fut essayé sur l'USS New York' en et permit de repérer un avion à 100 kilomètres de distance[11].
France
Durant la même période, le physicien Camille Gutton et son assistant Émile Pierret travaillaient sur les communications par ondes décimétriques à la Faculté des Sciences de Nancy. Ils utilisaient dès 1927 une longueur d’onde de 16 cm et purent démontrer la possibilité de détecter la présence d'un objet dans la cour de l'Université[12].
De son côté, au Laboratoire national de radioélectricité du Général Ferrié, Pierre David propose en 1928 de détecter les avions avec un faisceau d'ondes courtes et expérimente en 1934 un dispositif bistatique en onde continue comprenant un émetteur à =5 m et un récepteur distant de 5 km. Ces systèmes, que l'on appellera de manière générique Barrage David, sont utilisés par la Marine française pour équiper les abords des ports de Brest et de Toulon et acquis à trente exemplaires par l'Armée de l'Air pour protéger les frontières de la Suisse à la Mer du nord. Ils deviennent les premiers systèmes français opérationnels de détection électromagnétique[13]. Ces systèmes étaient capables de détecter le passage d’un avion (perturbation des signaux radio électriques) sans pourvoir donner l’altitude ni la position de l’appareil.

En 1934, Henri Gutton, fils de Camille, est engagé par Maurice Ponte au laboratoire de recherches de la Compagnie générale de la télégraphie sans fil. Son équipe fait une étude systématique du magnétron, développé en 1921 par Albert W. Hull[14] - [15], et procède à des essais sur des systèmes de détection par ondes courtes avec des longueurs d'onde de 16 et 80 cm[16], selon les principes de Tesla[6] - [17] - [18]. Un brevet est déposé le ([brevet français no 788795][19]) pour un « appareil de détection » à ondes décimétrique. Le premier exemplaire équipa en le cargo Oregon[20]. L’appareil qui utilisait des antennes paraboliques indépendantes pour l’émission et pour la réception permit de suivre la côte tout en détectant précisément les navires jusqu’à 10 ou 12 milles marins, l'onde de 16 cm s'avéra celle la plus efficace[3]. En 1935, on l'a retenu pour être utilisée sur le modèle de production monté sur le paquebot Normandie[3].
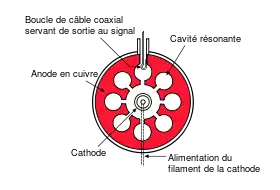
La Compagnie générale de la télégraphie sans fil continua ses recherches et en 1937, le tube auquel aboutirent H. Gutton et Bérline fournissait en régime continu une puissance de 10 watts et oscillait sur des longueurs d’onde aussi petites que 8 centimètres. Les deux demi-anodes, dit à « anodes fendues »[21], étaient munies de doigts imbriqués les uns dans les autres et permettaient d'obtenir des puissances d'émission beaucoup plus importantes que les triodes[22]. Dans ce tube, la cathode est entourée d’un ensemble de circuits résonnants qui font de ce magnétron le premier tube à circuit interne en hyperfréquences en forme de ligne digitale[23]. Il est un précurseur du magnétron à cavités, développé ultérieurement en Russie et en Grande-Bretagne[23].
En , Maurice Elie, Henri Gutton, Jean Jacques Hugon, et Maurice Ponte déposent une demande de brevet aux États-Unis (déjà déposé en France en 1938) pour une seule antenne émission/réception et lecture sur oscillographe[24]. Grâce à l’amélioration de la cathode, la puissance en crête de ces magnétrons est progressivement portée à 50 watts, puis à 1 kilowatt en . C'est ce dernier tube qui fut remis aux chercheurs de l’Amirauté britannique le [23] - [22].
« Au cours de cette période antérieure à 1939, si brusquement interrompue, la CSF était donc parvenue à mettre au point un ensemble technique fonctionnant sur une longueur d’onde de 16 centimètres en régime d’impulsions d’une durée de quelques microsecondes, qui préfigurait (aux performances près naturellement) les radars modernes. »
— Maurice Ponte[23]
Grande-Bretagne

52° 11′ 46″ N, 1° 03′ 00″ O
En 1915, Robert Watson-Watt, un ingénieur écossais, joignit le Meteorological Office (le service météo du Royaume-Uni) pour travailler sur un projet de détection des orages par les ondes radio qu’ils produisent. En effet, les éclairs en ionisant l'air, produisent un signal radio et Watson-Watt pensa utiliser la détection de ce signal pour avertir les pilotes du danger[25]. Dès les premières expériences, il put détecter le signal même à très longue distance. Il restait cependant deux problèmes : la direction d'où venait ce signal et comment l'afficher. Le premier problème fut résolu en utilisant une antenne directionnelle qu'on pouvait tourner manuellement pour maximiser le signal, pointant ainsi vers l'orage. Le second fut résolu par l'utilisation du tube cathodique à phosphore d'un oscilloscope récemment développé[25]. Un tel système, mis en service en 1923, représentait un pas important vers le développement d'un système radar[25]. Il manquait cependant la partie émission d'une impulsion et une façon de mesurer le temps aller-retour du signal pour obtenir la distance à la cible.
Watson-Watt avait cependant toujours voulu travailler pour le War Department (Ministère de la guerre) et obtint d’être transféré au tout nouveau Aldershot Wireless Station de l’Air Ministry Meteorological Office (Service météo de l'aviation militaire). En 1933, le Ministère de l'Air (Air Ministry) mit sur pied un comité pour la modernisation de la défense aérienne du Royaume-Uni, présidé par Sir Henry Tizard[25]. En effet, les bombardiers développés depuis la Première Guerre mondiale pouvaient maintenant voler au-dessus de la portée des canons de DCA, ce qui constituait une grande menace, et les aérodromes ennemis n'étaient qu'à 20 minutes de vol.
Lors d’une visite du président du comité dans ses bureaux, Watson-Watt mentionna que son équipe travaillerait sur « le problème difficile mais plus réel de l'utilisation des ondes radio réfléchies pour la détection et le positionnement de cibles[25] », une application de ses recherches antérieures. Le , Watson-Watt envoya un mémo du système proposé au Air Ministry intitulé Detection and location of aircraft by radio methods et on lui demanda immédiatement une démonstration[25]. Dès le , il avait mis sur pied deux antennes à environ 10 km d'une antenne onde-courte de la BBC à Daventry. Dans le plus grand secret, Watson-Watt, son assistant Arnold Wilkins et un seul membre du comité, A.P. Rowe, assistèrent à la démonstration qui permit de repérer un bombardier à plusieurs occasions avec le signal émis. Fait plus important, le premier ministre, Stanley Baldwin, se tenait informé des progrès du développement du radar.
Deux semaines plus tard, Wilkins quitta le Radio Research Station avec un petit groupe, dont Edward George Bowen, pour continuer la recherche à Orfordness. Le , Watson-Watt obtint un brevet pour le système radar (brevet britannique GB593017[19] - [26] - [27]). Dès juin, son équipe pouvait détecter un avion à 27 kilomètres, ce qui était assez loin pour cesser tout développement sur des systèmes compétiteurs à écholocalisation sonore. À la fin de la même année, la portée était déjà de 100 km et en décembre, les plans pour cinq stations couvrant l'approche de Londres étaient déjà prêts.
Une de ces stations serait située près sur la côte près de Orfordness et Bawdsey Research Station fut érigé là pour servir de centre principal de recherche sur le radar. En 1937, les premières stations étaient opérationnelles et le système mis à l'épreuve. Les résultats furent concluants et vingt autres stations furent commandées. Au début de la Seconde Guerre mondiale, 19 étaient construites et prêtes à assumer un rôle décisif dans la bataille d'Angleterre sous le nom de « Chain Home ». Il y avait cinquante stations à la fin de la guerre. Les Allemands connaissaient la construction de la Chain Home mais ne connaissaient pas vraiment son utilité. Ils testèrent leurs théories sur le sujet en envoyant le Graf Zeppelin II mais conclurent que le réseau était un système de communication à longue portée pour la marine.
Hongrie
Zoltán Lajos Bay, travaillant au laboratoire de la compagnie Tungsram, développa le premier radar hongrois en 1936 et obtint, avec son équipe, plusieurs brevets dans les domaines des tubes à vides, fluorescents et décharge de hauts voltages dans des tubes à gaz.
Pays-Bas
Plusieurs années avant les développements par Watson-Watt, les scientifiques néerlandais Weiler et Gratema avaient poursuivi des recherches dans le même domaine à la suite des rumeurs de développement d’un « rayon de la mort » par les Nazis. En , ils avaient déjà construit quatre prototypes de détecteurs utilisant une longueur d’onde de 50 cm pour guider le tir des canons. Ces appareils avaient atteint une portée utile de 20 kilomètres et étaient plus sophistiqués que leur équivalent britannique[28]. Malheureusement pour les Pays-Bas, ces radars n’étaient pas répandus dans les forces armées quand la Luftwaffe attaqua et détruisit l’aviation néerlandaise et ses aérodromes. Les opérateurs des appareils ne purent que suivre la progression des transports de troupes aéroportées qui envahissaient le pays, sans pouvoir riposter. Quelques scientifiques qui avaient participé aux travaux ont pu s’échapper en Grande-Bretagne avant la capitulation des Pays-Bas le , apportant dans leurs bagages les plans de leurs appareils[29] - [30].
Union soviétique

Le , les scientifiques soviétiques ont testé avec succès un système radar développé conjointement par le Comité central de l’artillerie de l’Armée rouge (GAU) et le Laboratoire central sur la radio. Un avion volant à 150 mètres d’altitude fut repéré à environ 600 ou 700 mètres de distance de l’appareil[31]. Plus tard en 1934, un programme pour adapter ce concept au tir antiaérien a été entrepris par le GAU et l’Institut de recherche en électricité et physique de Leningrad. En juillet, le radar RAPID fut testé à Leningrad.
Le RUS-1 (РУС-1, acronyme pour радиоуловитель самолётов, appareil radar) fut le premier radar l'Armée rouge en 1939. Son successeur fut le type de RUS-2. Les premiers essais ont eu lieu en à Leningrad où il a permis la détermination de la présence d'avions ennemis, mais pas leur altitude ni leur vitesse. Le RUS-1 fut d'abord utilisé durant la Guerre d'Hiver contre la Finlande. En 1941, 41 RUS-1 furent disponibles dans la défense aérienne de Moscou et de Leningrad.
Seconde Guerre mondiale
Au déclenchement des hostilités, la Grande-Bretagne et l’Allemagne nazie avaient chacune un programme sur la télédétection. Chacun espionnait l’autre et lançait de la désinformation. Quand arriva la bataille d'Angleterre, les deux pays avaient des réseaux fonctionnels de radars.
Ces réseaux défensifs ont bien été exploités par les britanniques qui avaient appris à coordonner l’information avec le déploiement des chasseurs de la Royal Air Force. En effet, Robert Watson-Watt avait remarqué lors des premiers essais que l’information ne se rendait pas à temps aux escadres de chasseurs. Il avait suggéré la mise sur pied d’un centre de coordination centralisé où les stations radars rapporteraient les mouvements ennemis et qui en retour dépêcheraient les avions disponibles les plus près.
Le réseau allemand, quant à lui, était peu développé bien que supérieur en qualité. En effet, il ne pouvait aider les bombardiers en vol à éviter l’ennemi au-delà de sa portée utile. Le commandement aérien allemand n’a donc pas vraiment compris le rôle essentiel de la Chain Home dans la bataille.
Les britanniques assiégés par les Allemands ne pouvaient fabriquer et développer à eux seuls ces systèmes. Ils envoyèrent donc Edward George Bowen aux États-Unis en 1940, dans le cadre de la mission Tizard. Le but était de partager leurs informations avec un futur allié, dont la plus importante fut le magnétron. Les Britanniques communiquèrent également avec le gouvernement canadien pour les mêmes raisons dès 1939[22]. Le conflit s’étendant, les États-Unis, les pays du Commonwealth et le Japon commencèrent tous à faire des recherches pour développer ou améliorer ces appareils de détection.
Chain Home

Le système Chain Home, ou AMES Type 1, était très primitif et pour être prêt au combat, il a été mis en production en urgence par Robert Watson-Watt. Il souffrait de bruits et d'erreurs de détection mais il a fourni une information critique, sans laquelle la bataille d'Angleterre aurait pu être perdue. Le Chain Home n'avait rien de l'image populaire d'un radar, il était constitué d'une série d'antennes fixes qui émettaient un « éventail » étalé, couvrant un grand angle d'une centaine de degrés. Ce réseau utilisait une fréquence entre 20 et 30 MHz, soit une longueur d'onde de 15 à 10 mètres. La puissance d'émission était de 350 kW et le taux de répétition des impulsions de 20 μs entre 12,5 et 25 par seconde[32].
Le réseau de réception était composé de deux antennes fixées à angle droit l'une de l'autre reliées à un goniomètre. Ces antennes avaient une sensibilité directionnelle, et selon l'azimut de la cible, l'écho était plus ou moins fort dans l'une que dans l'autre. L'opérateur devait ajuster manuellement un circuit de comparaison sur un oscilloscope pour estimer au mieux la force relative des deux signaux reçus. L'angle vertical de la cible était estimé par comparaison avec la force des signaux reçus dans un autre ensemble d'antennes situé plus près du sol. Le retard de l'écho déterminait la distance.

Pendant la bataille, les stations de Chain Home ont été attaquées de nombreuses fois entre le 12 et le . Les huttes en bois recélant l'équipement radar ont parfois été endommagées mais les tours ont survécu en général à cause de leur robuste construction en poutrelles d'acier qui laissaient passer le souffle de l'explosion. De plus, les britanniques ont utilisé d'autres tours de télécommunication pour émettre de faux signaux radar. Comme les signaux ont rapidement été remis en route, la Luftwaffe a conclu que les stations étaient trop difficiles à endommager par bombardement, et les ont laissées tranquilles pour le reste de la guerre.
Si la Luftwaffe avait réalisé combien ces stations radar étaient essentielles à la défense aérienne britannique, il est probable qu'elle aurait mis toutes ses ressources pour les détruire. Elle a plutôt opté de faire des approches à très basse altitude, dans la zone de bruit venant des échos de sol. Les britanniques, qui avaient anticipé ce problème, ont alors déployé une seconde ligne de détection le long de la côte, connue comme la Chain Home Low ou AMES type 2, ayant une plus courte portée mais une résolution plus grande à bas niveau[33]. Cette nouvelle ligne utilisait des antennes formées de 32 dipôles en réseau et orientables, plus près de ce qu'on conçoit maintenant comme un radar[33]. Le mouvement de l'antenne était manuel jusqu'en 1941 et c'est la Force féminine auxiliaire de l'Aviation qui l'opérait à l'aide de pédales.
Le système Chain Home a été détruit après la guerre, mais certaines des grandes tours d'acier restent, reconverties pour de nouveaux usages au XXIe siècle.
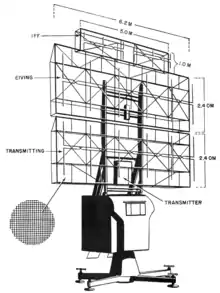
Radars Freya et Seetakt

Les radars Freya et Seetakt étaient bien plus évolués du point de vue technique que leur équivalent britannique. Ils utilisent une longueur d'onde entre 60 cm et 2,5 m et une antenne orientable faite d'un quadrillage[34]. Ceci donnait une bien meilleure résolution à ces radars, permettant la détection d'objets bien plus petits et diminuant également l'encombrement des antennes. En raison du coût de leur construction, il n'y a au début de la guerre que huit appareils Freya en service, qui ne pouvaient fournir qu'une couverture très limitée des territoires à surveiller. De plus, la Luftwaffe pensait plus à l'attaque qu'à la défense et n'avait pas développé une coordination des opérations comme les Britanniques.
Cependant, en 1940, la RAF a commencé les raids de bombardement nocturnes et le haut commandement allemand a dû réagir. Josef Kammhuber a été nommé commandant des chasseurs de nuit et l'augmentation de la couverture du réseau était une de ses priorités. Il divisa la zone à couvrir en cellules à travers la France, la Belgique et les Pays-Bas, qu'il réunit sous le vocable de ligne Kammhuber. Chaque cellule comptait un radar, des projecteurs, un groupe principal de chasseurs et un groupe de relève. Les chasseurs prenaient l'air dès la détection par radar et suivaient les bombardiers grâce aux projecteurs.
Le mauvais temps rendait l'interception difficile et les Allemands développèrent de plus petits radars, les Würzburg. Ceux-ci utilisaient une antenne parabolique - très précise mais de courte portée - pour suivre l'ennemi détecté par le radar Freya. Il atteignirent une résolution de 0,2 degré. Deux de ces Würzburg étaient assignés à une cellule, le premier suivait un bombardier et le second un chasseur, l'opérateur utilisant ces données pour guider le chasseur. Les défauts de ce système devinrent rapidement apparents aux Britanniques qui envoyèrent en masse leurs bombardiers vers le plus petit nombre de cellules à partir de 1942. Comme les Würzburg ne pouvaient en suivre qu'un à la fois et que le nombre de chasseurs par cellule était limité, le système devint inefficace.
Du côté naval, les Seetakt furent montés à bord de vaisseaux de surface de la Kriegsmarine bien avant que la Royal Navy ou la U.S. Navy ne soit équipées de radars[34]. Cependant, le nombre resta limité à cause du conservatisme de l'amirauté et de l'environnement très dur en mer pour l'équipement[34]. Les Seetakt furent également utilisés en défense côtière.
CXAM et autres radars américains

Le Signal Corps de l’Armée américaine travaillait sur des systèmes de détection sonore et thermique des avions. Cependant, les succès de Robert Page avec un radar pulsé en 1934 au Naval Research Laboratories a redirigé les recherches dans cette direction. Le Corps utilisa son expertise en radiodiffusion pour construire un radar de bande VHF à Fort Monmouth et Camp Evans au New Jersey pour l’artillerie côtière. La US Navy de son côté développa le radar CXAM en 1938 comme mentionné antérieurement.
Lors des échanges entre les États-Unis et la Grande-Bretagne, dans le cadre le la mission Tizard de 1940, les Britanniques furent surpris d’apprendre l'existence du CXAM, un radar assez similaire à leur Chain Home. Les Américains obtinrent à cette occasion le magnétron permettant de développer un radar centimétrique puissant, ce qu’ils n’avaient pu faire avec l’électronique dont ils disposaient jusqu’alors. Le MIT créa le Radiation Laboratory, qui employa jusqu’à 4 000 personnes durant la guerre dont Pauline Morrow Austin, pour parfaire les recherches dans ce domaine
Lors de l’entrée des États-Unis dans la Seconde Guerre mondiale, l’Armée et la Navy avaient donc des radars opérationnels prêts pour le front. Celui de la US Army, le radar SCR-270, était même déployé à Hawaï lors de l’attaque de Pearl Harbor et détecta les bombardiers japonais en approche à plus de 200 km des côtes. Malheureusement, l’information ne fut pas crue et les Américains durent donc apprendre des Britanniques l’intégration efficace des radars dans un réseau de défense. Ce radar s'est retrouvé à Saskatoon (Canada) par la suite pour une raison inconnue et ce n'est que 40 ans plus tard qu'il a été rapatrié dans un musée du Maryland (États-Unis)[35].
C’est la US Navy qui a créé en 1942 le néologisme « RADAR » issu de l'anglais radio detection and ranging. Celui-ci qui remplaça universellement le sigle utilisé par le Britanniques de « RDF » (Radio Direction Finding). Comme un moyen mnémotechnique le terme « ARMPIT » (aisselle) est encore utilisé dans ce service pour décrire les composantes d’un radar : Antenne, Récepteur, Modulateur, PowerSupply (alimentation électrique) , Indicateur (affichage), Transmetteur.
Radar aéroporté

Déjà en 1936, les Britanniques réalisèrent que la Luftwaffe se tournerait vers les bombardements nocturnes si les raids de jour se révélaient infructueux. Watson-Watt chargea un de ses assistants du Radio Research Station, Edward George Bowen, du développement d'un radar qui puisse être transporté à bord d'un chasseur. En effet, le contact visuel nocturne d'un bombardier n'était que de 300 m et le réseau Chain Home de détection n'avait pas assez de précision pour amener les chasseurs si près de leur cible. Bowen estima qu'un radar à bord d'un aéronef ne devait pas dépasser 90 kg et 230 litres en volume, sans requérir plus de 500 watts de puissance. Pour réduire la traînée de l'antenne en réduisant son diamètre, la longueur d'onde du faisceau ne devait pas dépasser 1 mètre ce qui était difficile pour la technologie de l'époque.
Néanmoins, ce type de système fut perfectionné en 1940 grâce à la mise au point du magnétron, qui donne une longueur d'onde centimétrique, et du duplexeur qui permet d'utiliser la même antenne pour émettre et recevoir. Les radars de contour topographique comme le H2S permirent de mieux diriger les bombardements Alliés sur l’Allemagne. Ces radars ont été également utilisés au sol pour les tirs anti-aériens grâce à leur précision. Ces radars mis en réseaux de défense autour de Londres furent essentiels pour terminer le Blitz de 1941 et ont permis d’intercepter plusieurs V-1 à partir de 1944. Bowen monta également de tels radars sur les avions de patrouille maritime dans la lutte aux sous-marins et sur les croiseurs/destroyers pour le tir naval.
Les Allemands ont pris plus de temps à développer leur propres radars aéroportés, les Lichtenstein B/C et SN-2, car la précision de leurs radars terrestres était suffisante pour guider leurs bombardiers à distance jusqu'à ce que les Britanniques brouillent leurs émissions. Les Lichtenstein n’ont été déployés qu’en 1942 et opéraient à une longueur d’onde de 2 mètres (150 MHz). Ceci nécessitait une antenne assez importante et donc une forte traînée qui réduisait la vitesse de vol. Tard en 1943, la Luftwaffe mis en service une version plus performante, le SN-2 mais ce n'est que dans les derniers mois de la guerre qu'un radar de longueur d’onde de 9 cm avec petite antenne, le Berlin, entra en scène.
Les Britanniques et les Allemands réalisèrent vite que l'émission des avions ennemis les trahissait en vol et chacun mit au point des détecteurs d'émissions sur la fréquence de l'adversaire : le « Perfectos » pour les Britanniques et le « Naxos ZR » pour les Allemands. Les Britanniques furent grandement aidés dans ce domaine lorsqu'un chasseur de nuit Ju 88 équipé d'un radar Lichtenstein dut faire un atterrissage forcé en Grande-Bretagne par temps brumeux et fut capturé.
Japon

Bien avant le début des hostilités, le Japon avait des chercheurs reconnus dans les technologies nécessaires au radar. Le très renommé Hidetsugu Yagi avait, entre autres, donné une présentation à la fin des années 1920 sur les antennes et le magnétron qui avait très intéressé les chercheurs américains. Ses projets sur la transmission de puissance à l’aide de micro-ondes, publiés au début des années 1930 pouvaient mener au développement d’un radar à micro-onde mais Yagi était pratiquement inconnu dans son propre pays.
Quand les troupes japonaises ont capturé un radar de pointage britannique à Singapour, ils réalisèrent avec surprise que l’« antenne Yagi » mentionnée dans les manuels se référaient à une invention de leur propre chercheur. Ils capturèrent également deux radars américains (SCR-268 et SCR-270) aux Philippines. Ceci donna une idée de leur utilité et les recherches accélèrent mais la rivalité entre l’Armée et la Marine impériales ainsi que divers organismes civils, en plus d’une mauvaise évaluation du potentiel du radar, eurent pour résultat un retard de trois à cinq ans par rapport aux États-Unis.

En , les US Marines capturèrent un radar de la Marine japonaise de type 1. Il était assez rudimentaire, même face aux radars américains, mais ce fut quand même une surprise d’apprendre que le Japon possédait cette technologie. La production de radars japonais efficaces survint trop tard pour influencer le cours des événements. L’armée a finalement mis en service en 1944 des radars pour le tir de ses canons alors que la marine a travaillé séparément sur des radars de détection des navires et des avions pour ses navires, incluant ceux utilisant des ondes centimétriques.
Ce n’est que vers la fin de la guerre du Pacifique que des unités suffisamment petites ont pu être embarquées sur les chasseurs Nakajima J1N1, sur les bombardiers Mitsubishi G4M et les avions de reconnaissance Kawanishi H8K[36]. Il est facile d’imager l’effet de tous ces développements tardifs s’ils étaient survenus au début des hostilités.
Canada
Peu de recherches ont porté sur le principe du radar au Canada avant la guerre. Cependant, en 1939 le Conseil national de recherches Canada reçut le mandat du gouvernement de mettre d’importants efforts dans cette direction à la suite des échanges avec les Britanniques. À la chute de la France en , le radar reçut la plus haute priorité et plusieurs systèmes performants sortirent des laboratoires canadiens. En particulier les radars de type CSC (Canadian Sea Control) et SW1C (Surface Warning 1st Canadian) qui furent mis en service sur les navires de la Marine royale canadienne dès 1941 pour la protection des convois[37] - [35].
Drôle de guerre et campagne de France
La Marine nationale s'est engagée résolument dans la voie des radars métriques à impulsions en 1939[38]. Les projets d’équipements de détection électromagnétique sont confiés à l'ingénieur du Génie Maritime Giboin, qui décide de faire appel aux principales sociétés françaises de radio : SFR/CSF, SADIR (Société Anonyme Des Industries Radioélectriques), Radio-Industrie et LMT.
Divers radars de surveillance aérienne sont créés entre à et fonctionnent sur des longueurs d'onde variant de 2 m à 6,6 m. Le modèle le plus puissant est installé en par les laboratoires LMT sur un promontoire de l’île de Port-Cros, au large de Toulon. Ce radar de grande puissance fonctionne sur une longueur d’onde de 6 m et utilise un équipement construit à l’origine pour l’émetteur de télévision de la tour Eiffel. L'étage de puissance de l'émetteur comprend deux tubes à refroidissement par eau et le récepteur est situé à 200 m environ. Dès les essais, des avions sont détectés à 130 km. Dans la nuit du 12 au , l'aviation italienne attaque Toulon et subit la perte de plusieurs appareils face à la chasse française, guidée par la station de Port-Cros.
Après juin 1940
- Développements
En France, au moment de la débâcle de juin 1940, Les LLMT, c'est-à-dire les laboratoires de LMT, filiale de la holding américaine ITT, SADIR-Carpentier et la SFR, filiale de la holding française Compagnie générale de la télégraphie sans fil sont en pointe dans le domaine du radar[39]. Le Commandant Labat, responsable du Groupement des contrôles radioélectrique créé après la défaite par Weygand, ministre de la Défense du premier gouvernement de Vichy, jouera un rôle de premier plan pour permettre à ces différentes équipes de poursuivre leurs études après l'armistice de juin 1940[39].
LMT bénéficie à cette époque d'une sorte de neutralité, du fait que la maison mère ITT possède également des filiales allemandes. Les LLMT créent un laboratoire de 300 personnes à Lyon, mais en , encouragés par Labat, Deloraine, et quatre autres ingénieurs dont Émile Labin, le spécialiste du radar, et Henri Busignies, s'étaient embarqués pour les États-Unis où d'importants moyens leur seront donnés pour développer les radiogoniomètres connus sous le nom de Huff-Duff, spécialité de Busignies, mais les études sur le radar relèvent du plus haut secret et sont interdites aux ressortissants d'un pays étranger occupé par l'ennemi[39].
En , Maurice Ponte et Henri Gutton s'étaient rendus à Londres pour faire profiter les alliés anglais des dernières avancées des laboratoires de la SFR sur le magnétron. Ces études se poursuivent pendant l'Occupation, à l'insu des Allemands, à l'usine de Levallois-Perret, en même temps qu'un laboratoire créé à Lyon, en Zone Libre, travaille sur l'ensemble des activités intéressant la Défense Nationale. C'est là que seront développées les études de détection de navires et la télémétrie par ondes très courtes[39]. En région toulonnaise, la SFR mène des campagnes de mesures pour mettre au point un radar de 16 cm de longueur d'onde mettant en œuvre un magnétron de 4 kW. L'émetteur produit des impulsions de 1 µs de 3 kW de puissance crête à la cadence de 5 kHz. Les antennes d'émission et de réception sont des cornets rectangulaires de 80 x 60 cm environ. Ce radar de conduite de tir, testé en 1941, est peut- être le premier radar centimétrique de conduite de tir[39] . En , à Saint-Mandrier pour la défense de Toulon, un radar de 25 kW et de 50 cm de longueur d'onde est mis au point. Il peut détecter un bateau de 10 000 tonnes à 120 km avec une précision de 30 mètres. Sa précision azimutale est de 1 degré, obtenue par commutation de lobes d'antennes. En , lors de l'invasion de la zone libre tout le matériel est détruit avec le sabordage de la flotte[40]. La SFR et les LLMT poursuivront de discrètes études sur l'amélioration de la puissance des tubes ou de la sensibilité des récepteurs sous couvert de recherches sur les télécommunications[39].
- Équipements[41]
La Marine nationale française profite des clauses de l'armistice, qui garantissent l'activité de la flotte basée à Toulon et outre-mer. Il est décidé d'équiper les navires en Moyens de Détection Électromagnétique. L'équipement est réalisé sur les navires les plus imposants de la flotte, cuirassés et croiseurs lourds
- Radars SADIR : Le premier navire équipé d'un radar est le cuirassé Richelieu, stationné à Dakar depuis l’armistice. En 1941, il reçoit sous les ordres du capitaine de frégate Agenet un radar SADIR, ramené de Bizerte et fonctionnant sur une longueur d’onde de 1,2 m (250 MHz, 15 kW crête). L'appareil se révèle capable de détecter un avion à haute altitude à 80 km, à 50 km à moyenne altitude et un croiseur à 20 km. Le cuirassé Strasbourg et le croiseur lourd Algérie sont équipés en janvier et en .
- Radars LMT : Un équipement de plus forte puissance est ensuite utilisé, le radar LMT (50 kW de puissance crête, =2 m). Il assure la détection d'avions à 110 km et de navires à 25 km, et avec un dispositif de télémétrie sur échelle fine, une précision de 25 m pour les distances inférieures à 30 km. Le radar LMT équipe le cuirassé Jean-Bart en à Casablanca, puis le croiseur lourd Colbert à Toulon.
Après le débarquement des Alliés en Afrique du Nord le , les troupes allemandes entrent en zone sud et la flotte se saborde à Toulon dans la nuit du 27 au . Quelques bâtiments français sont rescapés, notamment le Richelieu. Lors d'un séjour prolongé à l'arsenal de New York en , les ingénieurs américains ont découvert le radar installé à bord au cours d'une escale à Dakar en février-[39].
Magnétron
Les oscillateurs à tubes utilisés avant le développement du magnétron étaient incapables de fournir la puissance nécessaire au fonctionnement des radars (d'où une portée insuffisante) et des fréquences élevées (d'où une discrimination angulaire faible). Une autre source de génération devait être trouvée pour donner des impulsions de plusieurs centaines de watts et de longueur d'onde centimétrique permettant une plus fine résolution de détection.
L'oscillation électromagnétique entre deux pôles avait déjà été explorée durant les années 1920 par Albert W. Hull du laboratoire de recherche de la General Electric à Schenectady, New York. Il s'agissait d'un système encore peu efficace qu'il nomma magnétron[42]. En 1926, un étudiant du professeur Hidetsugu Yagi, Kinjiro Okabe, reprit cette innovation en divisant l'anode en deux morceaux (anode fendue) ce qui lui a permis de passer du domaine des hautes fréquences (10 à 100 mètres de longueur d'onde) à celui décimétrique[43] - [44]. Cette découverte fit le tour de la communauté scientifique mais à cause de problèmes de stabilité de la fréquence émise, cet appareil ne fut pas immédiatement utilisé en télécommunication. Il a obtenu un brevet aux États-Unis en 1929 (No. 1,735,294) pour cet appareil. L'allemand Erich Habann, à l'université d'Iéna, et le professeur tchèque Augustin Žáček, à l'université Charles de Prague, développèrent indépendamment un magnétron pouvant atteindre des fréquences de 100 mégahertz à 1 gigahertz[45].
Le principe de la cavité résonnante a été suivi à la fin des années 1930 pour créer le magnétron à cavités résonantes. Sir John Randall et Harry Boot, de l’université de Birmingham, sont les auteurs d'importantes améliorations à ce type de magnétron au début de 1940. L'amélioration, durant la Seconde Guerre mondiale, du système britannique serait en partie redevable à l'apport des recherches de Maurice Ponte et de l'équipe de la Compagnie générale de la télégraphie sans fils. Le , Ponte apporta lui-même à Londres les plans d'un magnétron à anodes fendues, plus performant et de plus courte longueur d'onde que les tubes à vide jusqu'alors utilisés[22].
Quoi qu'il en soit, le magnétron permit pour la première fois d'émettre des ondes entre le centimètre et le décimètre ce qui se rapprochait de la grandeur des cibles et donc permettait une bien meilleure résolution. Ainsi, les ondes métriques utilisées dans la Chain Home pouvaient avoir de la difficulté à distinguer les avions vus de face individuellement alors que l'onde du magnétron le permettait. De plus, l'utilisation d'une plus petite longueur d'onde a permis de diminuer considérable la taille de l'antenne ce qui a mené à leur utilisation sur les navires et les avions.
Lorsque les Britanniques remirent cet instrument aux Américains, le Massachusetts Institute of Technology (MIT) créa le Radiation Lab pour l'étude et le développement de magnétrons plus perfectionnés. Les progrès technologiques apportés au magnétron (à cavités) ont fourni aux Alliés une avance technologique qui a joué un rôle prépondérant dans l'issue de la guerre.
Les Allemands ont également poursuivi des recherches en ce domaine et Hans Hollmann de Berlin a pris un brevet en 1935 sur un magnétron à multiples cavités résonnantes que l'armée allemande délaissa au profit du klystron plus stable en fréquence.
Affichage PPI
Les premières données radar développées dans les années 1930 ont été celles de la position et de l'intensité du retour que l'on appelle la réflectivité. Le travail de l’opérateur dans le Chain Home était très fastidieux, il devait constamment bouger les antennes réceptrices et regarder un oscillateur pour trouver le retour maximal, puis calculer la distance. Un affichage plus convivial devait être développé avec les nouveaux radars à antenne directionnelle.
Déjà Hans Hollmann en Allemagne avait suggéré l'idée d'un affichage panoramique au début des années 1930, alors qu'il travaillait chez GEMA (Gesellschaft für Elektroakustische und Mechanische Apparate), en utilisant le tube cathodique récemment inventé[46]. GEMA produisit le premier modèle en 1937, Hollman a breveté l'invention en 1940 et l’armée allemande l'a utilisé dans le radar « Jagdschloss » par la suite[47]. C'est cependant au Telecommunications Research Establishment de Grande-Bretagne qu'il a été perfectionné et produit pour la première fois à grande échelle pour équiper le radar H2S des bombardiers. Les Anglais nommèrent ce système PPI (de l'anglais Plan Position Indicator).
Sur un PPI, le radar est généralement situé au centre de l'écran. Les échos sont placés selon l'azimut (0 degré étant généralement le nord sauf dans les navires et les avions où c'est l'avant de l'appareil) et la distance par rapport au centre. Lorsque l’opérateur balaie l’horizon à un angle d'élévation prédéterminé, les échos de retour reçus par l'antenne s'affichent selon l’angle de l'antenne et la distance au radar. Pour faciliter le repérage par un opérateur, des cercles concentriques gradués sont placés depuis le centre vers l'extérieur et des axes radiaux sont placés régulièrement autour de l'affichage.
Ce type d’affiche a été utilisé avec le radar H2S des bombardiers autant que sur les navires et les radars terrestres. Il est encore aujourd’hui synonyme d'affichage radar pour la plupart des gens.
Depuis la guerre
Astronautique
Le Hongrois Zoltán Lajos Bay fut professeur à l’université technique de Budapest de 1938 à 1948 où continua son travail sur le radar. Le , son équipe fut la première à capter le retour d'un faisceau radar depuis la Lune en utilisant une méthode d'intégration du signal pour séparer le signal utile du bruit de fond[48]. Ceci s'est produit seulement un mois après qu'une équipe américaine eut réussi à produire le premier retour du même endroit avec un radar SCR-270.
Karl Jansky fut le premier signal à reconnaître en 1932 un signal radio d'origine extra-terrestre capté sur Terre. En 1937, Grote Reber, n'ayant pas réussi à se faire engager dans l'équipe de Jansky, construisit un radiotélescope à ses propres frais pour explorer l'espace dans le domaine radio, en amateur. Il fut pratiquement le seul à faire de la radioastronomie pendant dix ans. Après la Seconde Guerre mondiale, les recherches commencèrent sur une plus grande échelle avec des radars militaires recyclés.
Aviation civile

Les années d'après-guerre ont donné lieu à l'introduction du radar dans le contrôle aérien. En 1946 aux États-Unis, la Civil Aeronautics Administration (maintenant le FAA) dévoila un programme expérimental d'utilisation du radar par les tours de contrôle pour diriger les vols civils autour des aéroports. En 1952, le CAA généralisa le programme et quatre ans plus tard mis sur pied un système de contrôle national de trafic aérien fondé sur des radars ayant une portée de 370 km. En 1960, le CAA obligea les avions de ligne à s'équiper de transpondeurs pour être reconnus par les radars secondaires.
Les autres pays suivirent un chemin similaire et le système international de contrôle aérien dépend maintenant grandement d’un réseau de radars militaires et civils à travers le monde. Ceux-ci se divisent en radars d'approche et de longue portée ce qui permet de suivre toutes les étapes d'un vol sauf au-dessus de zones éloignées comme les océans. Deux types de radars de contrôle aérien découlèrent de l’expérience de la Seconde Guerre mondiale :
- le radar primaire, qui est encore très utilisé pour le contrôle aérien militaire, car il détecte les avions possédant ou non un transpondeur. Dans le civil, il est tombé en désuétude au profit du secondaire ;
- le radar secondaire, le plus utilisé dans l'aviation civile, profite de l'identification des pistes et de la visualisation uniquement des vols pertinents. Ce type de radars ne localise que les avions possédant un transpondeur.
Le contrôleur utilise le radar pour rendre trois services, appelés « services radar » :
- Assistance radar : fournit aux aéronefs des informations relatives à leur position et aux écarts par rapport à leur route ;
- Surveillance radar : utilise le radar pour mieux connaître la position des aéronefs ;
- Guidage radar : donne des caps aux aéronefs afin de leur faire suivre une trajectoire spécifiée.
Développements militaires

Après la fin de la Seconde Guerre mondiale, la tension entre l’URSS et les autres Alliés a vite débouché sur la Guerre froide. Avec la mise en service de bombardiers stratosphériques à longue portée, de missiles intercontinentaux balistiques, et de sous-marins armés de missiles nucléaires la détection à longue portée devint primordiale. Du côté de l’OTAN, il y eut construction de lignes de défense comme la ligne Pinetree déployée au Canada durant les années 1950.
Les radars de ce système, tirés de la technologie de la dernière guerre, se sont révélés rapidement trop simples pour la tâche et faciles à brouiller. Une nouvelle ligne nommée la ligne Mid-Canada la remplaça avec des radars plus sophistiqués mais se révéla de trop courte portée. On construisit donc la ligne DEW à travers l’Arctique, de l’Alaska à l’Islande, une entreprise impressionnante pour l’époque. La plupart de ces radars de la ligne sont maintenant hors service, ceux restant ayant une portée plus grande de type « trans-horizon ».
Des expériences aux États–Unis d'Amérique ont conduit à l'utilisation d'un radar bistatique, le AN/FPS-23 fluttar radar, en complément des radars monostatiques conventionnels sur la ligne DEW. Développé en 1955, ce radar comprenait une antenne émettrice qui inondait de son faisceau une zone et le récepteur passif du fluttar écoutait les variations des échos de retour pour détecter le franchissement de la ligne DEW par des bombardiers volant à faible altitude. Ces radars étaient conçus pour surveiller les zones d'ombre entre les radars de surveillance monostatiques MPQ-64 Sentinel. Ils sont restés en service pendant cinq ans avant que leur technologie ne soit désuète. Avec la baisse du coût de l'informatique et l'arrivée de récepteurs numériques dans les années 1980, on assiste à un nouveau regain d'intérêt pour ce type de radars passifs. Les ingénieurs ont pu utiliser des techniques numériques du traitement du signal pour se servir de différents signaux radioélectriques et des techniques de la corrélation croisée pour obtenir des informations suffisamment précises pour détecter des cibles et estimer leur distance bistatique et leur décalage Doppler. Des programmes secrets étaient poursuivis dans plusieurs pays, mais c'est en 1998 que Lockheed-Martin Mission Systems lança le premier matériel commercial avec son Silent Sentry system qui utilisait les émissions des radios FM et des émetteurs de télévision analogiques locales comme sources de signal.
Pour la défense des navires de surface contre les attaques de missiles ou d’avions réactés, la vitesse de sondage a dû être accrue. Les antennes conventionnelles étant trop lentes dans leur rotation, le radar tridimensionnel à balayage électronique fut la réponse à ce problème. Il s’agit d’un radar qui utilise une antenne formée d'un très grand nombre d'ouvertures de tubes de guides d'ondes sur une surface plane et qui recrée électroniquement le patron de sondage d’un antenne parabolique en une fraction du temps requis pour un sondage avec cette dernière. Le système de combat Aegis fut le premier à utiliser ce genre de radar.
Géologie
Le radar a trouvé des débouchés en géomorphologie et en sondage du sous-sol. Les radars à synthèse d'ouverture et ceux à visée latérale permettent depuis un avion ou un satellite artificiel de cartographier avec précision la surface terrestre ou d'autres planètes. Ils permettent d'analyser le couvert de glace sur les mers froides et même d'estimer la force des vents par la forme des vagues.
Le radar à pénétration de sol est un appareil géophysique utilisant le principe d'un radar que l'on pointe vers le sol pour en étudier la composition et la structure. En général, on utilise la bande des micro-ondes et des ondes radio (VHF/UHF) pour sonder une variété de terrains, incluant les calottes glaciaires et les étendues d'eau.
Météorologie
Durant la Seconde Guerre mondiale, les opérateurs des radars micro-ondes des armées alliées remarquèrent de la contamination qui s’avéra être des échos venant des précipitations (pluie, neige, etc.). Juste après la guerre, les scientifiques militaires, qui avaient déjà commencé leur recherche sur les phénomènes rapportés, ont continué leur travail tant dans la vie militaire que civile.
Aux États-Unis, David Atlas est un des pionniers de la météorologie radar pour le groupe de l’armée de l’air et plus tard avec le Massachusetts Institute of Technology[49]. Il a participé au développement des premiers radars météorologiques opérationnels. Au Canada, J. Stewart Marshall et R.H. Douglas forment le « Stormy Weather Group » à l’université McGill de Montréal[50]. Marshall et son étudiant Walter Palmer sont reconnus pour avoir travaillé sur la distribution du diamètre des gouttes dans les précipitations ce qui a mené à la relation entre la réflectivité (Z), le retour d’intensité des précipitations, et le taux de précipitations (R) au sol communément appelé relation Z-R. En Grande-Bretagne, les recherches se poursuivirent pour relier les signatures des échos aux caractéristiques des précipitations et sur les possibilités qu’offrent les différentes longueurs d'onde entre 1 et 10 centimètres.
À partir des années 1950, les différents services de météorologie à travers le monde construisent des radars météorologiques pour suivre les précipitations par sa réflectivité. D’abord ces radars furent pour usage local dans les grands centres et avec un nombre limité d’angles et provenaient de surplus militaires. Ils étaient opérés en temps réel par les météorologistes qui devaient suivre les échos sur des écrans cathodiques. En 1953 Donald Staggs, un ingénieur en électricité travaillant pour le Illinois State Water Survey, a été le premier à noter sur les sorties de réflectivité le crochet typique associé à un orage tornadique[51]. En 1957, le National Weather Service introduit le WSR-57, le premier radar conçu exclusivement pour la détection des précipitations.
L'affichage original était le PPI mais en 1957, les professeurs Langleben et Gaherty de l’université McGill de Montréal (Canada) ont développé un ordre de balayage qui permettait de varier l'angle d'élévation et de ne garder que les données à une hauteur donnée. En utilisant les données à la bonne distance pour chaque angle d'élévation, ils obtinrent une série d'anneaux des données autour du radar qu'ils assemblèrent pour obtenir un affichage à altitude constante ou CAPPI[52] - [53]. Plusieurs pays dont le Canada, la Grande-Bretagne et l'Australie, sondent sur un nombre suffisant d'angles d'élévation pour avoir une continuité verticale (compte tenu de la largeur du faisceau) et ont adopté le CAPPI. D'autres pays recueillant moins d'angles, comme la France ou les États-Unis, préfèrent encore le PPI ou un composé des réflectivités maximales au-dessus d'un point.
Dans les années 1970, les différents radars commencent à être organisés en réseaux avec un début de standardisation. Les premiers systèmes de capture des images ont été développés. Le nombre d’angles sondés augmente ce qui permet d’obtenir un volume de données en trois dimensions. Les coupes verticales sont développées. On étudie ainsi la structure des orages et autres nuages (entre autres par Isztar Zawadski). Les groupes de recherche se sont multipliés à travers le monde, en particulier le NSSL aux États-Unis en 1964, qui commencent à expérimenter sur la variation de la polarisation du signal radar ainsi que sur l’utilisation de l’effet Doppler-Fizeau. En 1973, le NSSL enregistre pour la première fois la présence d'un mésocyclone dans un orage tornadique près d'Oklahoma City, ce qui va révolutionner l'analyse des orages violents[54].
Entre 1980 et 2000, les réseaux de radars météorologiques se généralisent en Amérique du Nord, en Europe, au Japon et dans certains autres pays. Les radars conventionnels sont remplacés par des radars pouvant détecter non seulement l’intensité des précipitations mais également leur vitesse de déplacement (effet Doppler). Aux États-Unis, l’implantation de ces radars de longueur d’onde de 10 cm appelé NEXRAD ou WSR-88D, basés sur les travaux du NSSL, commence en 1988 et se termine au début des années 1990[54]. Au Canada, le premier radar Doppler est celui de King City, au nord de Toronto, en 1985. Il est construit pour tester le concept avec une longueur d'onde de 5 cm[55]. Le second sera celui de 10 cm de l'Université McGill en 1993. Le réseau canadien de radars météorologiques est modernisé au complet à partir de 1998. La France (réseau ARAMIS) et les autres pays européens se convertissent à la fin des années 1990 et après 2000. En Australie, quelques radars de recherche sont construits à la fin des années 1990 et début 2000 mais ce n'est qu'en 2003 qu'un programme pour renouveler le réseau national réserve certains sites pour des radars avec fonction Doppler[56].
Le développement fulgurant de l’informatique permet de traiter les données radars en temps réel pour faire une multitude de produits directs (CAPPI, PPI, cumul de précipitations, etc.) mais également des algorithmes qui permettent de repérer les précipitations dangereuses (orages, pluie diluvienne, rafales sous les nuages, etc.) et de prévoir à court terme leur déplacement.
Après 2000, les recherches qui ont été effectuées sur la double polarisation du signal radar commencent à trouver des applications pratiques dans la détection du type de précipitations. La France[57], le Canada, les États-Unis, l’Australie et d’autres ont transformé certains de leurs radars pour utiliser ce concept en mode pré-opérationnel. Des recherches sont en cours depuis 2003 pour utiliser des antennes réseau à commande de phase assemblées en radar tridimensionnel à balayage électronique pour remplacer le sondage mécanique en balayage électronique, donc plus rapide.
Notes et références
- (en) « The inventor Christian Hülmeyer », Site 100 ans de Radar (consulté le ) [PDF]
- (en) van Keuren, D.K., « Science Goes to War: The Radiation Laboratory, Radar, and Their Technological Consequences », Reviews in American History, vol. 25, , p. 643-647
- (fr) Maurice Ponte, « L'histoire du "radar ", les faits », www.radar-france.fr (consulté le )
- (de) « Biographie: Heinrich Hertz, 1857-1894 », Deutsches Historisches Museum (consulté le )
- (en) Martin Hollmann, « Christian Huelsmeyer, the inventor », Radar World, (consulté le )
- (en) R.M. Page, « The Early History of RADAR », Proceedings of the Institute of Radio Engineers, Institute of electrical and electronics engineers, vol. Volume 50, no 5, , p. 1232 - 1236 (ISSN 0096-8390, DOI 10.1109/JRPROC.1962.288078, lire en ligne [PDF], consulté le )(Édition spéciale du 50e anniversaire)
- Yves Blanchard, Le radar, 1904-2004 : histoire d'un siècle d'innovations techniques et opérationnelles, Paris, Ellipses, (ISBN 978-2-7298-1802-9), p. 25-26, 220-223
- (en) Mark Denny, Blip, ping & buzz : making sense of radar and sonar, Baltimore, Johns Hopkins University Press, , 274 p. (ISBN 978-0-8018-8665-2 et 0801886651, lire en ligne), p. 9-13
- Blanchard, p. 139-159
- (en) Harry von Kroge (trad. Louis Brown), GEMA: Birthplace of German Radar and Sonar, Inst. of Physics Publishing, (ISBN 9780367455538, DOI 10.1201/9781420034301), chap. 3 (« An irresolute beginning »).
- (en) Martin Hollmann, « Radar Development In America », Radar World, (consulté le )
- Blanchard, p. 77-78
- Blanchard, p. 64-76
- (en)Albert W. Hull, « The effect of a uniform magnetic field on the motion of electrons between coaxial cylinders », Physical Review, vol. 18, no 1, , p. 31-57
- Albert W. Hull, « The magnetron », Journal of the American Institute of Electrical Engineers, vol. 40, no 9, , p. 715-723
- Thierry BRESSOL, « Histoire du Radar de Navigation Maritime... Et de la TV », Souvenirs de mer, sur souvenirs-de-mer.cloudns.org, (consulté le ).
- Émile Girardeau, Souvenirs de longue vie, Berger-levrault, , 419 p. (ASIN B0014VZLDA), p. 209-218.
- « Émile Girardeau », sur 100ansderadio.free.fr (consulté le ).
- « Copie des brevets d'inventions du radar 1934 » [archive du ], www.radar-france.fr (consulté le ).
- Blanchard, p. 87
- (fr) A. Blanc-Lapierre et G. Goudet, « Étude du magnétron en régime continu, tenant compte de la charge d'espace », Journal de Physique, EDP Sciences, vol. 6, , p. 146-152 (DOI 10.1051/jphysrad:0194500605014600, lire en ligne) [PDF]
- (en) Paul A. Redhead, chercheur émérite du Conseil national de recherche du Canada, « The invention of the cavity magnetron and its introduction into Canada and the U.S.A », Association canadienne des physiciens et physiciennes, (consulté le ), p. 324 [PDF]
- 50 années de technique, le radar par M.Maurice Ponte / cinquantenaire de la CSF
- « System for object detection and distance measurement », N° 2,433,838, United States Patent Office
- (en) « Robert Watson-Watt », The Radar Pages (consulté le )
- (en) « British man first to patent radar 1935 », British Patent Office (Bureau des brevets britanniques) (consulté le )
- (en) « Patent GB593017 », UK Intellectual Property Office (consulté le )
- (nl) R. de Bruin et al., Illusies en incidenten, de Militaire luchtvaart tot 10 mei 1940, Bureau drukwerk Klu, , 298 p. (résumé)
- (en) « Radar », Dutch Knowledge Network (consulté le )
- (nl) « Hoe de radar naar Hengelo kwam » [archive du ], sur www.maxstaal.com (consulté le )
- (ru) « Первые опыты по радиообнаружению самолетов », hist.rloc.ru (consulté le )
- (en) Dick Barrett, « The Chain Home radar system », Radar Pages, (consulté le )
- (en) Dick Barrett, « The Chain Home Low radar system », Radar Pages, (consulté le )
- (en) Greg Goebel, « Origins of german radars: Seetakt, Freya, Wuerzburg », Vector site, (consulté le )
- (en) Don Moorcroft, « Origins of Radar-based Research in Canada », Université Western Ontario, (consulté le )
- (en) Martin Favorite, « Japanese Radar Of World War II », star-games.com, (consulté le )
- (en) Jerry Proc, « ASDIC, Radar and IFF Systems Aboard HMCS HAIDA - Part 8 of 10 », jproc.ca, (consulté le )
- Jacques Darricau et Yves Blanchard, « Histoire du radar dans le monde puis en France, Partie 1 », Revue Pégase, no 107, , p. 12-15 (lire en ligne [PDF]).
- (en) Yves Blanchard, Le radar, 1904-2004 : histoire d'un siècle d'innovations techniques et opérationnelles, Paris, Ellipses, (ISBN 978-2-7298-1802-9), p. 220-231
- (en) Sean S. Swords et Peter Peregrinus (éditeur), Technical History of the Beginnings of Radar, Londres, Institute of electrical and electronics engineers, , 325 p. (ISBN 0-86341-043-X et 978-0863410437, présentation en ligne)
- Jacques Darricau et Yves Blanchard, « Histoire du radar dans le monde puis en France, Partie 1 », Revue Pégase, no 107, , p. 15 (lire en ligne [PDF])
- J. Voge, Les tubes aux hyperfréquences, Eyrolles p. 130-131.
- (en) Kinjiro Okabe, « On the Applications of Various Electronic Phenomena and the Thermionic Tubes of New Types », Journal of the IEE of Japan, vol. 473, no supplémentaire, , p. 13
- (en) Kinjiro Okabe, « Production of intense extra-short radio waves by a split-anode magnetron », Journal of the IEE of Japan, vol. 474, , p. 284ff
- (en) « The 70th birthday of Prof. Dr August Žáček », Czechoslovak Journal of Physics, vol. 6, no 2, , p. 204-205 (lire en ligne, consulté le )
- (en) Martin Hollmann, « Hollmann and von Ardenne Cathode Ray Tubes », Radarworld, (consulté le )
- (en) Martin Hollmann, « Radar Development in Germany », Radarworld, (consulté le )
- (en)(hu) « Histoire complète de Tungsram », Tungsram (version du 29 juillet 2004 sur Internet Archive).
- (en) David Atlas, Radar in Meteorology: Battan Memorial and 40th Anniversary Radar Meteorology Conference, Boston, American Meteorological Society, , 806 p. (ISBN 0-933876-86-6)
- (en) Frédéric fabry, « L'histoire du «Stormy Weather Group» », Université McGill, Montréal, Canada, (consulté le )
- (en) « The First Tornadic Hook Echo Weather Radar Observations », Université d'État du Colorado, (consulté le )
- (en) David Atlas, Radar in Meteorology : Battan memorial and 40th anniversary radar meteorology conference, Boston, American Meteorological Society, , 806 p. (ISBN 0-933876-86-6)
- (en) J. Stewart Marshall, « The Three McGill Observatories », Université McGill, (consulté le ) [PDF]
- (en) Susan Cobb, « Weather radar development highlight of the National Severe Storms Laboratory first 40 years », NOAA Magazine, NOAA, (lire en ligne, consulté le )
- (en) C.L. Crozier, P.I. Joe, J.W. Scott, H.N. Herscovitch et T.R. Nichols, « The King City Operational Doppler Radar: Development, All-Season Applications and Forecasting », Société canadienne de météorologie et d'océanographie, (consulté le ) [PDF]
- (en) « Radar Network and Doppler Services Upgrade Project », Bureau of Meteorology, (consulté le )
- (fr) Jacques Parent du Châtelet et al. de Météo-France, « Le projet PANTHERE », 32e Conférence radar, Albuquerque, NM, American Meteorological Society, [PDF]
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « History of radar » (voir la liste des auteurs).
- Il comporte également des informations depuis les articles Radar, Radar météorologique et Robert Watson-Watt
Bibliographie
- Yves Blanchard, Le radar. 1904-2004 : Histoire d'un siècle d'innovations techniques et opérationnelles, éditions Ellipses, , 432 p. (présentation en ligne)
- (en) E.G. Bowen, Radar Days, Bristol, Institute of Physics Publishing, (ISBN 0-7503-0586-X, lire en ligne)
- (en) Michael Bragg, RDF1 The Location of Aircraft by Radio Methods 1935-1945, Paisley, Hawkhead Publishing, , 400 p. (ISBN 0-9531544-0-8 et 978-0-9531-5440-1)Histoire du radar de surface en Grande-Bretagne durant la Seconde Guerre mondiale
- (en) Jim Brown, Radar - how it all began, Janus Pub Co, , 168 p. (ISBN 1-85756-212-7 et 978-1-8575-6212-5)
- (en) Louis Brown, A Radar History of World War 2 : Technical and Military Imperatives, Bristol & Philadelphie, Institute of Physics Publishing, , 580 p. (ISBN 0-7503-0659-9, présentation en ligne)
- (en) Robert Buderi, The invention that changed the world : the story of radar from war to peace, New York, Simon & Schuster, , 575 p. (ISBN 0-349-11068-9 et 978-0-3491-1068-4, présentation en ligne)
- (en) Robert Hanbury Brown, Boffin : A Personal Story of the early Days of Radar and Radio Astronomy and Quantum Optics, Taylor & Francis, , 190 p. (ISBN 0-7503-0130-9 et 978-0-7503-0130-5)
- (en) Derek Howse, Radar At Sea The Royal Navy in World War 2, Annapolis, Maryland, Naval Institute Press, , 383 p. (ISBN 1-55750-704-X et 978-1-5575-0704-4, présentation en ligne)
- Maurice Élie, Henri Gutton, Jean-Jacques Hugon et Maurice Ponte, « Détection d’obstacles à la Navigation sans visibilité. », 5e Section du Comité d’administration de la Société française des Électriciens, (lire en ligne).
- (en) R.V. Jones, Most Secret War, Londres, Wordsworth Editions Ltd et New Ed edition, , 568 p. (ISBN 1-85326-699-X et 978-1-8532-6699-7, présentation en ligne)Mémoires de R.V. Jones au British Scientific Intelligence, entre 1939 et 1945, travaillant à anticiper les avancées des Allemands dans le domaine du radar, de la radionavigation et le développement des V1/V2
- (en) Colin Latham et Anne Stobbs, The Birth of British Radar : The Memoirs of Arnold 'Skip' Wilkins (en), Speedwell, , 110 p. (ISBN 0-9537166-2-7 et 978-0-953-71662-3, présentation en ligne)
- (en) (Sir) Bernard Lovell, Echoes of War : The History of H2S, Taylor & Francis, , 310 p. (ISBN 0-85274-317-3 et 978-0-8527-4317-1, présentation en ligne)
- (en) David Pritchard, The Radar War Germany's Pioneering Achievement 1904-1945, Wellingborough, Patrick Stephens Ltd, , 240 p. (ISBN 1-85260-246-5)
- (en) David Zimmerman, Britain's Shield : Radar and the Defeat of the Luftwaffe, Stroud, Sutton Publishing Ltd, , 258 p. (ISBN 0-7509-1799-7)
Liens externes
- Jacques Darricau et Yves Blanchard, « Histoire du radar dans le monde puis en France » : « Un condensé du livre d'Yves Blanchard. »
- « Histoire brève du radar » [PDF], sur aerostories2.free.fr : « Un peu franco-centré »
- « Histoire du brevet français 1934 », sur site www. radar-france.fr : « Franco-centré »
- (en) « The Radar Pages » : « Introduction au radar et à son histoire »
- (en) Greg Goebel, « The Wizard War: WW2 & The Origins Of Rada » : « Histoire du radar américano-britannique »
- (en) Martin Hollman, « Radar Family Tree »
- (en) « The Secrets of Radar Museum » : « Implication du Canada dans le développement du radar au cours de la Seconde Guerre mondiale »