Ligne Mid-Canada
La ligne Mid-Canada (MCL), également connue sous le nom de McGill Fence, était une ligne d'alerte précoce de radars distribués à travers le moyen-nord canadien et utilisée pour détecter une attaque de bombardiers soviétiques sur l'Amérique du Nord durant la guerre froide. Elle a été construite pour compléter la ligne Pinetree moins avancée et plus au sud. La majorité des stations de la ligne Mid-Canada n'ont été utilisées que de la fin des années 1950 au milieu des années 1960, alors que la menace d'attaque passait des bombardiers aux missiles intercontinentaux. Lorsque le MCL fut fermé, le rôle d'alerte précoce est passé presque entièrement à la ligne DEW plus sophistiquée et plus au nord dans l’Arctique canadien et américain.

| Sous-classe de | système d'avertissement |
|---|---|
| Partie de | Commandement de la défense aérospatiale de l'Amérique du Nord |
| Conflit | guerre froide |
| Pays | Canada |
| Maintenance assurée par | Aviation royale canadienne |
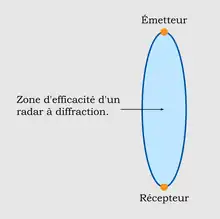
Le MCL était basé sur le principe du radar bistatique, utilisant des émetteurs et des récepteurs séparés. Un avion volant n'importe où entre les stations refléterait une partie du signal transmis vers le récepteur, où il se mélangerait avec le signal provenant directement de l'émetteur. Le mélange des deux signaux produit un motif qui est très facile à détecter à l'aide d'une électronique simple. L'émetteur à ondes entretenues n'étant pas pulsé, il ne nécessitait pas de hautes tensions et seulement des antennes omnidirectionnelles. Cela donnait un système de très faible coût et qui peut couvrir de vastes zones, au prix de ne fournir aucune information sur l'emplacement précis de la cible.
Tout au long de son histoire, le MCL a souffert d'un problème qui n'a jamais été résolu : en raison du fonctionnement du radar bistatique, tout objet se trouvant directement entre les stations émet un écho important, contrairement aux radars monostatiques conventionnels où cet effet est limité à la zone immédiatement autour du site. Dans le cas du MCL, cela posait des problèmes lorsque des volées d'oiseaux passaient n'importe où près de l'une ou l'autre station et submergeaient le signal d'un aéronef plus éloigné. La résolution de ce problème à l'aide de l'effet Doppler fut un critère de majeur pour l' AN/FPS-23 « Fluttar » qui déployé dans la ligne DEW.
Histoire
Mise en contexte
La construction de la ligne Pinetree venait tout juste de commencer lorsque les planificateurs ont commencé à s'inquiéter de ses capacités et de son emplacement. Au moment de la détection d'une attaque par des aéronefs à réaction, il y aurait peu de temps avant que l'attaque n'atteigne les villes canadiennes ou du nord des États-Unis[1]. De plus, le réseau utilisait des radars à impulsions qu'il était assez facile à brouiller tout en étant incapables de détecter des cibles proches du sol en raison. Bien que coûteux en carburant, il serait possible aux bombardiers soviétiques d'échapper à la détection en volant plus bas et en passant entre les stations.
Bennett Lewis, directeur des laboratoires d'Énergie atomique du Canada limitée (EACL) de Chalk River, et ancien surintendant principal du Telecommunications Research Establishment (TRE) du Royaume-Uni, avait proposé à Recherche et développement pour la défense Canada (RDDC) un système qui évitait ces deux problèmes[2]. Connu aujourd'hui sous le nom de radar bistatique à diffraction, il utilisait deux antennes, un émetteur et un récepteur, séparées par une certaine distance. Les antennes étaient positionnées et dirigées de manière que le signal continu de l'émetteur remplisse l'espace au-dessus de la ligne entre les deux stations. Un avion volant dans cette région refléterait un certain signal vers le récepteur, permettant une détection à des altitudes aussi élevées que 65 000 pieds (19 812 m)[1].
Un avantage majeur du système est qu'il nécessite beaucoup moins d'énergie pour fonctionner efficacement. Dans un radar conventionnel, le signal radio doit se déplacer vers la cible et revenir. Comme le signal variant comme l'inverse du carré de la distance à l'aller puis au retour, l'équation du radar montre que l'intensité de l'écho est proportinnelle à l'inverse de la distance à la quatrième puissance (). En revanche, un signal radar à diffusion directe parcourt toujours à peu près la même distance totale, de l'émetteur au récepteur, modifiée uniquement par l'altitude de la cible. Cela signifie qu'il dépend seulement de et fournit ainsi beaucoup plus d'énergie au récepteur qu'un radar conventionnel pour la même portée. De plus, contrairement à un radar monostatique conventionnel, l'émetteur n'avait pas besoin d'un temps d'écoute pour permettre au récepteur de recevoir le signal. Étant donné que la quantité totale d'énergie reçue au récepteur est fonction à la fois de la puissance de crête et de la longueur de l'impulsion, l'utilisation d'un signal continu signifie que la même énergie totale utilise une puissance de crête de l'émetteur beaucoup plus faible. Le tout permettait de déployer un système moins coûteux[3].


L'inconvénient majeur du système est qu'il indiquait pas l'emplacement de l'aéronef dans le faisceau, le singal émis en continu ne permettant pas de déterminer le temps parcouru entre l'émission et la réception. En fait, ce système est une « barrière radar » qui indique que quelque chose s'approche, mais pas exactement où il se trouve[1]. Pour aider à localiser la cible dans une certaine mesure, la proposition était de construire deux clôtures interconnectées, de sorte que chaque paire de stations soit peut-être à 30 kilomètres l'une de l'autre, une distance suffisamment courte pour que le radar d'un avion d'interception puisse trouver la cible dans cette zone. L'utilisation de deux ensembles qui se chevauchent permet également à une paire de couvrir la zone morte directement au-dessus des tours de l'autre.
Le concept initial de Lewis était de placer les émetteurs et les récepteurs sur des poteaux téléphoniques et des tours de transmission d'électricité, ce qui fournissait à la fois un emplacement pratique et la petite quantité d'énergie nécessaire pour faire fonctionner l'électronique. Dans le cas des poteaux téléphoniques, les lignes seraient également utilisées pour renvoyer les données aux stations de suivi. Ce concept a suscité un intérêt considérable, bien qu'il ait été abandonné pour des raisons qui ne sont pas tout à fait claires. Willis et Griffiths pensaient que 1 000 radars de ce type serait nécessaires, mais il est également probable que le désir de localiser la ligne plus au nord des zones peuplées du sud du Canada était probablement aussi important[4]. Quoi qu'il en soit, la simplicité du concept a contribué à le porter à l'attention des planificateurs aériens.
Test du concept
Le RDDC a décidé de poursuivre l'idée de Lewis en 1950-1951 en donnant un contrat de recherche avec au laboratoire de recherche en électronique Eaton de l'Université McGill, dirigé par le professeur Garfield Woonton. Lewis a suggéré de confier le projet au professeur associé, J. Rennie Whitehead, un ancien de ses collègues au TRE et qui avait récemment pris un poste au loboratoire. Certains tests préliminaires ont été effectués en 1952 avec du matériel de maquette construit par un étudiant diplômé, Hugh Hamilton, afin de confirmer la validité de l'idée[2].
Entre-temps, à l'instigation du RDDC, RCA Victor travaillait sur la conception et la production de récepteurs, émetteurs et antennes pour des tests à grande échelle. Les essais ont été effectués à l'été 1953, lorsque Whitehead et son équipe de RCA Victor et du personnel de l'Aviation royale du Canada (RCAF) ont installé et exploité une série de sept stations s'étendant d'Ottawa à Mattawa le long de la vallée de la rivière des Outaouais. Connus sous le nom de code « Spider Web », à la suggestion de Hamilton, les essais du réseau ont été effectués avec des aéronefs de la base aérienne de Saint-Hubert, près de Montréal. Toutes les observations ont été transmises et effectuées dans la cabane d'équipement de l'une des sept stations, située à Deep River[2].
Le capitaine d'aviation Andrew Matthews de la 104e unité de communications de Saint-Hubert a organisé une série de passes avec des avions divers, y compris un avion léger Auster, un Lockheed T-33 Silver Star, un bombardier Avro Lancaster et même un avion de transport de Havilland Comet. Les tests ont révélé les « signatures » spectrales des aéronefs traversant la ligne à différents points et ont démontré la capacité de détecter toutes les tailles d'aéronefs de 30 mètres à plus de 40 000 pieds (12 192 m) d'altitude. Pendant ce temps, le Dr Ross Warren de RCA Victor et le Dr Whitehead ont développé conjointement le contexte théorique du travail dans un rapport majeur au RDDC[2].
Les essais ont été suivis en 1954 par des tests intensifs sur une seule liaison de 48 km de largeur, construite dans les Cantons-de-l'Est pour Bell Canada, qui avait alors reçu le feu vert pour l'implantation de la ligne Mid-Canada à la place de RCA Victor[2]. Les essais sur ce lien prototype ont également été menés par Whitehead et une petite équipe en collaboration avec le commandement de la défense aérienne à Sain-Hubert, cette fois avec l'équipement de Bell. Les essais impliquaient le survol d'un certain nombre de bombardiers Boeing B-52 Stratofortress en accord avec le Strategic Air Command et une unité locale de bombardiers. Ils utilisaient également à plein temps un Avro Lancaster de la base des Forces canadiennes Greenwood pour les importants tests de bas niveau[2].
Projet de défense aérienne
En février 1953, on a demandé au Groupe d'étude militaire canado-américain (MSG) d'étudier les aspects du système de défense aérienne nord-américain en général et du système d'alerte rapide en particulier qui intéressent les deux pays[5]. Le Groupe multipartite a alors demandé aux commandants de la défense aérienne du Canada et des États-Unis de préparer des mémoires indépendants sur le sujet. En juillet 1953, le Commandement canadien avait terminé son mémoire, suivi peu après par son homologue américain. Les deux rapports suggéraient de construire une barrière Doppler plus au nord, le long du 55e parallèle, à peu près à l'entrée de la baie James dans la baie d'Hudson[5].
En octobre 1953, le Groupe multipartite recommanda donc aux deux gouvernements d'établir le plus tôt possible une ligne d'alerte rapide située généralement le long du 55e parallèle entre l'Alaska et Terre-Neuve et exposa leurs exigences opérationnelles minimales[5]. À la fin de novembre 1953, la ligne Mid-Canada avait été approuvée en principe. Contrairement à la ligne Pinetree, et à la future ligne DEW, exploitée conjointement, la ligne Mid-Canada serait entièrement financée et exploitée par l'Aviation royale canadienne (ARC). Le coût fut estimé par RDDC en 1953 à environ 69,7 millions $CAN, tandis qu'un rapport indépendant de l'ARC le situait à 85 millions $CAN, ce qui équivaut aujourd'hui à 807 millions $[5].
En décembre, un effort a commencé pour essayer de comprendre quels types de problèmes seraient rencontrés pendant la construction. Plusieurs « trains » constitués de traîneaux tirés par des tracteurs partirent hord-routes. L'un, piloté par l'ARC, partit vers l'est de Fort Nelson, en Colombie-Britannique, afin de rejoindre un deuxième se déplaçant à l'ouest de Flin Flon, au Manitoba, tandis qu'un troisième avec un équipage de l'armée quitta le lac Nipigon près de Thunder Bay, en Ontario, pour Lansdown House environ 200 kilomètres plus au nord. Les missions ont prouvé qu'il était possible de construire la nouvelle ligne, mais seulement pendant l'hiver lorsque la fondrière de mousse (muskeg) était gelé[5]. Ces missions ont également inspiré l'armée américaine à développer un véhicule de transport reprenant les caractéristiques des trains dans les années 1960 mais il ne fut jamais mis en production[6].
Pendant ce temps, des efforts étaient en cours pour commencer les études primaires de localisation. Il est rapidement devenu évident que les régions en question, du moins dans l'est du Canada, étaient si éloignées qu'il n'y avait pas d'information topographique vraiment précise. Un énorme effort pour cartographier la zone sur une bande de 15 milles (24 km) de largeur à travers tout le pays a été lancé par le Commandement du transport presque immédiatement et s'est terminé au printemps 1954. Avec ces informations en main, une division de construction fut créée, le Groupe d'ingénierie des systèmes (SEG), en février 1954, chargée de produire un rapport final sur le système à soumettre le [5].
Plans finaux
Au fur et à mesure que les expériences se poursuivaient, il est devenu clair qu'en utilisant des mâts plus grands, soit de 110 m de hauteur, les stations radar pouvaient être éloignées les unes des autres, jusqu'à 90 kilomètres. Cela a réduit le nombre de stations nécessaires mais augmenté le prix, estimé à environ 120 millions $. Bien que le rapport final ne fut pas encore prêt, un rapport intérimaire fut soumis en juin et il a été approuvé par le cabinet du gouvernement fédéral canadien à la fin du mois[5]. Il y est décrit le système avec huit grands centres de contrôle de secteur, numérotés de 200 à 900, chacun contrôlant jusqu'à trente sites radar automatiques pour un total de 90 stations radar[5]. Chacune des stations radar se composait d'un seul grand mât avec un certain nombre de petites paraboles dans des positions fixes sur le dessus (généralement quatre, deux pointés dans les deux directions orthogonales), avec la puissance et l'électronique situés dans un bâtiment sous le mât.
Les centres de contrôle de secteur seraient reliés à l'aide d'un système de communication micro-ondes avancé développé en partie par le Centre de recherche militaire canadien à la BFC Valcartier (CARDE) qui utilise la diffusion dans la troposphère pour les communications longue distance. Le site le plus au sud le long de la partie est de la ligne, au cap Henrietta Maria sur la baie d'Hudson, serait utilisé comme principal point de communication et trois stations de répétition supplémentaires transféreraient les données de la ligne vers le sud au centre de commande du NORAD à North Bay, en Ontario. La station la plus à l'est, Hopedale au Labrador, serait co-implantée avec une station existante de la ligne Pinetree afin de réduire les coûts de construction[5].
Tous les aéronefs transitant par la ligne devraient déposer un plan de vol à travers la zone d'identification médiane, ou MIDIZ, centrée sur la barrière. Les plans prévoyaient également la construction de plusieurs bases aériennes connues sous le nom d'aérodromes de dégagement de ligne juste au nord de la ligne, où des avions intercepteurs pourraient opérer en période d'alerte accrue[5].
À peu près à la même époque, un autre énorme projet de génie civil était en cours au Canada, la construction d'un système téléphonique de relais hyperfréquence pancanadien. Étant donné que bon nombre des problèmes logistiques étaient similaires, le groupe de construction, dirigé par Bell Canada, fut choisi comme entrepreneur principal pour la construction de la base. La sélection détaillée des sites a commencé en 1955, avec un important effort d'arpentage à travers le Canada le long du 55e parallèle. Les sites étaient si éloignés que l'Aviaton royale canadienne a dû former son premier escadron entièrement d'hélicoptères afin de fournir un soutien en vol aux équipes d'enquête[5].
Construction et démantèlement

La construction a commencé en 1956 et s'est déroulée rapidement. En avril 1957, la moitié est était opérationnelle et la ligne fut déclarée pleinement opérationnelle le . Les opérations furent bientôt intégrées au nouveau NORAD. Même les estimations révisées du SEG se sont révélées trop faibles et le coût final de la clôture est estimé à 224 566 830 $CAN, soit soit 1 963 000 000 $ en 2023[5].
Presque aussitôt, les unités mises en service montrèrent un grave problème. En raison des grandes sections efficaces radar observées avec ce type de radar, même les petites cibles produisaient des signaux détectables. Cela était multiplié si les cibles avaient à peu près la même taille que la longueur d'onde du radar ce qui avait tendance à les répéter selon des motifs qui étaient des multiples de cette longueur d'onde. Ce problème était particulièrement grave lors des migrations d'oiseaux au printemps et à l'automne, qui donnaient des signaux si puissants qu'ils rendaient les radars inutiles. Les essais sur le prototype dans les Cantons-de-l'Est avaient été effectués au cours de l'été et on n'avait donc pas noté ce phénomène[7].
Même avant que la ligne ne devienne opérationnelle, dans une répétition de l'histoire de la ligne Pinetree, une nouvelle ligne plus sophistiquée était déjà à l'étude qui combinerait la capacité de traçage du système Pinetree avec les capacités de barrière de la ligne du MCL. Elle serait située beaucoup plus au nord pour améliorer considérablement le temps de détection et de réponse. Apparaissant sous le nom de ligne Distant Early Warning, ou ligne DEW, la construction avait commencé avant même que la MCL ne devienne opérationnelle. Lorsque la ligne DEW est devenue opérationnelle en 1957, la valeur de la MCL s'est érodée et l'ARC a commencé à faire pression pour qu'elle soit démantelée[5].
Bien que fonctionnelle en théorie, le MCL a donné peu d'informations pour orienter les intercepteurs vers leurs cibles, de sorte que ces tâches nécessitaient encore les radars Pinetree beaucoup plus au sud. Le temps supplémentaire offert par le MCL ne valait pas la peine de maintenir la ligne en opération. L'USAF n'était pas d'accord, mais en dépit de leurs objections, la moitié ouest de la ligne fut fermée en janvier 1964, laissant la moitié est pour aider à défendre les zones industrielles du Canada et des États-Unis. Au fur et à mesure que l'Union soviétique déplaçait sa capacité offensive vers les missiles intercontinentaux, il devint clair que les systèmes MCL et Pinetree étaient d'un usage limité, et toute la ligne Mid-Canada fut fermée en avril 1965. Le site d'exploitation situé à Cranberry Portage, Manitoba, par exemple, a été converti en école secondaire et résidences depuis la fermeture des opérations actives sur le site au milieu des années 1960[5].
Les stations de la ligne DEW ont été placées de manière à offrir la meilleure vue possible de l'horizon, mais il restait un angle de détection minimum en dessous duquel les avions pouvaient se faufiler sans être vus. Au début de la planification, un système comme les tours de la MCL avait été considéré comme des éléments de remplissage des trous de détection entre les stations pour empêcher ce genre d'intrusion. Lorsque le MCL est entré en service et que le problème avec les oiseaux est devenu clair, le concept original de barrière a été remplacé par un concept utilisant le filtrage Doppler pour ignorer tout ce qui volait à moins de 200 km/h dans les radars AN/FPS-23 « Fluttar ». Ils ont effectivement filtré les oiseaux mais n'ont pas réussi à filtrer les avions de l'aviation civile volant dans la zone, y compris ceux qui volaient de base en base pour l'entretien et les rotations des équipes de travail[8]. En conséquence, le taux de fausses alarmes l'a rendu tout aussi inefficace que le MCL, et il a duré encore moins longtemps, arrêté en 1963[9].
| Site | Lieu | Coordonnées | Balise radio | Mise en fonction | Désactivation |
|---|---|---|---|---|---|
| Site 200 | Station de contrôle de secteur à Hopedale | 55° 27′ 52″ N, 60° 13′ 58″ O | |||
| Site 201 | |||||
| Site 203 | Station de détection Doppler | ||||
| Site 206 | Station de détection Doppler | ||||
| Site 209 | Station de détection Doppler | ||||
| Site 212 | Station de détection Doppler | ||||
| Site 215 | Station de détection Doppler | 55° 21′ 40″ N, 64° 01′ 30″ O | |||
| Site 218 | Station de détection Doppler | 55° 16′ 16″ N, 64° 49′ 11″ O | |||
| Site 218A | Station de détection Doppler | 55° 15′ 52″ N, 64° 17′ 36″ O | |||
| Site 221 | Station de détection Doppler | 55° 18′ 04″ N, 65° 24′ 04″ O | |||
| Site 221A | Station de détection Doppler | 55° 17′ 54″ N, 65° 20′ 19″ O | |||
| Site 224 | Station de détection Doppler | 55° 15′ 38″ N, 66° 04′ 06″ O | |||
| Site 224A | Station de détection Doppler | 55° 16′ 23″ N, 66° 13′ 14″ O | |||
| Site 227 | Station de détection Doppler | 55° 18′ 47″ N, 66° 42′ 18″ O | |||
| Site 300 | Station de contrôle de secteur à Schefferville | 54° 48′ 52″ N, 66° 45′ 19″ O | |||
| Site 303 | Station de détection Doppler | 55° 19′ 02″ N, 66° 41′ 38″ O | |||
| Site 303A | Station de détection Doppler | 55° 11′ 17″ N, 67° 24′ 22″ O | |||
| Site 306 | Station de détection Doppler | 55° 15′ 58″ N, 68° 20′ 42″ O | |||
| Site 306A | Station de détection Doppler | 55° 11′ 25″ N, 68° 06′ 22″ O | |||
| Site 309 | Station de détection Doppler | 55° 11′ 32″ N, 69° 01′ 18″ O | |||
| Site 309A | Station de détection Doppler | 55° 09′ 11″ N, 68° 47′ 32″ O | |||
| Site 312 | Station de détection Doppler | 55° 14′ 07″ N, 69° 44′ 29″ O | |||
| Site 312A | Station de détection Doppler | 55° 12′ 11″ N, 69° 31′ 29″ O | |||
| Site 315 | Station de détection Doppler | 55° 10′ 53″ N, 70° 34′ 47″ O | |||
| Site 315A | Station de détection Doppler | 55° 10′ 00″ N, 70° 40′ 13″ O | |||
| Site 318 | Station de détection Doppler | 55° 14′ 52″ N, 71° 20′ 28″ O | |||
| Site 318A | Station de détection Doppler | 55° 16′ 00″ N, 71° 19′ 00″ O | |||
| Site 321 | Station de détection Doppler | 55° 14′ 46″ N, 72° 12′ 02″ O | |||
| Site 321A | Station de détection Doppler | 55° 15′ 33″ N, 72° 12′ 13″ O | |||
| Site 324 | Station de détection Doppler | 55° 20′ 21″ N, 73° 01′ 01″ O | |||
| Site 324A | Station de détection Doppler | 55° 20′ 00″ N, 73° 01′ 27″ O | |||
| Site 327 | Station de détection Doppler | 55° 14′ 58″ N, 73° 44′ 42″ O | |||
| Site 327A | Station de détection Doppler | 55° 17′ 52″ N, 73° 44′ 50″ O | |||
| Site 330 | Station de détection Doppler | 55° 19′ 15″ N, 74° 34′ 17″ O | |||
| Site 330A | Station de détection Doppler | 55° 17′ 41″ N, 74° 33′ 26″ O | |||
| Site 333 | Station de détection Doppler | 55° 17′ 37″ N, 75° 16′ 25″ O | |||
| Site 333A | Station de détection Doppler | 55° 20′ 20″ N, 75° 24′ 29″ O | |||
| Site 336 | Station de détection Doppler | 55° 21′ 33″ N, 76° 06′ 05″ O | |||
| Site 336A | Station de détection Doppler | 55° 16′ 00″ N, 75° 59′ 00″ O | |||
| Site 339 | Station de détection Doppler | 55° 16′ 21″ N, 76° 47′ 29″ O | |||
| Site 339A | Station de détection Doppler | 55° 15′ 00″ N, 76° 50′ 00″ O | |||
| Site 342 | Station de détection Doppler | 55° 14′ 33″ N, 77° 38′ 15″ O | |||
| Site 400 | Station de contrôle de secteur à Kuujjuarapik | 55° 16′ 44″ N, 77° 44′ 21″ O | |||
| Site 401 | Station de détection Doppler | ||||
| Site 403 | Station de détection Doppler | 54° 59′ 33″ N, 78° 17′ 15″ O | |||
| Site 403A | Station de détection Doppler | 55° 06′ 29″ N, 78° 12′ 12″ O | |||
| Site 406 | Station de détection Doppler | 54° 49′ 41″ N, 79° 00′ 11″ O | |||
| Site 406A | Station de détection Doppler | 54° 48′ 00″ N, 79° 03′ 00″ O | |||
| Site 409A | Station de détection Doppler | 54° 38′ 19″ N, 79° 41′ 23″ O | |||
| Site 410 | Relais Cape Jones | 54° 38′ 21″ N, 79° 44′ 39″ O | |||
| Site 412 | Station de détection Doppler | 54° 19′ 47″ N, 81° 05′ 49″ O | |||
| Site 413 | Station de détection Doppler | 54° 21′ 52″ N, 81° 05′ 59″ O | |||
| Site 415 | Relais Cape Henrietta Maria | 54° 43′ 54″ N, 82° 24′ 29″ O | |||
| Site 416 | Station de détection Doppler | 54° 46′ 45″ N, 82° 22′ 52″ O | |||
| Site 418 | Station de détection Doppler | 54° 52′ 34″ N, 82° 58′ 48″ O | |||
| Site 421 | Station de détection Doppler | 54° 51′ 37″ N, 83° 24′ 49″ O | |||
| Site 424 | Station de détection Doppler | 55° 04′ 33″ N, 84° 18′ 39″ O | |||
| Site 427 | Station de détection Doppler | 55° 04′ 00″ N, 84° 51′ 04″ O | |||
| Site 500 | Station de contrôle de secteur à Winisk | 55° 14′ 39″ N, 85° 06′ 42″ O | |||
| Site 503 | Station de détection Doppler | 55° 17′ 05″ N, 85° 42′ 30″ O | |||
| Site 506 | Station de détection Doppler | 55° 17′ 17″ N, 86° 25′ 25″ O | |||
| Site 509 | Station de détection Doppler | 55° 29′ 25″ N, 87° 04′ 26″ O | |||
| Site 512 | Station de détection Doppler | 55° 35′ 26″ N, 87° 51′ 54″ O | |||
| Site 515 | Station de détection Doppler | 55° 52′ 51″ N, 88° 35′ 01″ O | |||
| Site 518 | Station de détection Doppler | 55° 58′ 28″ N, 89° 13′ 11″ O | |||
| Site 521 | Station de détection Doppler | 56° 13′ 30″ N, 89° 53′ 22″ O | |||
| Site 524 | Station de détection Doppler | 56° 17′ 25″ N, 90° 40′ 01″ O | |||
| Site 527 | Station de détection Doppler | 56° 24′ 41″ N, 91° 27′ 39″ O | |||
| Site 530 | Station de détection Doppler | 56° 22′ 49″ N, 92° 11′ 21″ O | |||
| Site 533 | Station de détection Doppler | 56° 27′ 58″ N, 92° 48′ 28″ O | |||
| Site 536 | Station de détection Doppler | 56° 23′ 43″ N, 93° 20′ 05″ O | |||
| Site 600 | Station de contrôle de secteur à Bird | 56° 30′ 26″ N, 94° 12′ 48″ O | |||
| Site 603 | Station de détection Doppler | 56° 10′ 00″ N, 94° 42′ 05″ O | |||
| Site 606 | Station de détection Doppler | 56° 01′ 33″ N, 95° 25′ 20″ O | |||
| Site 609 | Station de détection Doppler | 55° 48′ 25″ N, 96° 05′ 17″ O | |||
| Site 612 | Station de détection Doppler | 55° 39′ 40″ N, 96° 42′ 40″ O | |||
| Site 615 | Station de détection Doppler | 55° 19′ 00″ N, 97° 15′ 30″ O | |||
| Site 618 | Station de détection Doppler | 55° 10′ 49″ N, 97° 51′ 37″ O | |||
| Site 621 | Station de détection Doppler | 54° 54′ 47″ N, 98° 30′ 38″ O | |||
| Site 624 | Station de détection Doppler | 54° 47′ 55″ N, 99° 16′ 38″ O | |||
| Site 627 | Station de détection Doppler | 54° 38′ 10″ N, 99° 52′ 50″ O | |||
| Site 630 | Station de détection Doppler | 54° 39′ 57″ N, 100° 38′ 40″ O | |||
| Site 700 | Station de contrôle de secteur à Cranberry Portage | 54° 35′ 08″ N, 101° 22′ 17″ O | |||
| Site 701 | |||||
| Site 703 | Station de détection Doppler | 54° 40′ 50″ N, 102° 03′ 10″ O | |||
| Site 706 | Station de détection Doppler | 54° 39′ 08″ N, 102° 42′ 08″ O | |||
| Site 709 | Station de détection Doppler | 54° 49′ 47″ N, 103° 22′ 30″ O | |||
| Site 712 | Station de détection Doppler | 54° 53′ 48″ N, 104° 16′ 10″ O | |||
| Site 715 | Station de détection Doppler | 54° 58′ 27″ N, 104° 47′ 25″ O | |||
| Site 718 | Station de détection Doppler | 54° 55′ 54″ N, 105° 44′ 10″ O | |||
| Site 721 | Station de détection Doppler | 55° 03′ 56″ N, 106° 26′ 10″ O | |||
| Site 724 | Station de détection Doppler | 55° 04′ 30″ N, 107° 08′ 20″ O | |||
| Site 727 | Station de détection Doppler | 55° 14′ 40″ N, 107° 38′ 52″ O | |||
| Site 730 | Station de détection Doppler | 55° 19′ 27″ N, 108° 05′ 40″ O | |||
| Site 733 | Station de détection Doppler | 55° 36′ 50″ N, 108° 28′ 35″ O | |||
| Site 736 | Station de détection Doppler | 55° 59′ 46″ N, 109° 17′ 00″ O | |||
| Site 739 | Station de détection Doppler | 56° 08′ 32″ N, 109° 28′ 35″ O | |||
| Site 742 | Station de détection Doppler | 56° 21′ 30″ N, 110° 23′ 55″ O | |||
| Site 745 | Station de détection Doppler | 56° 31′ 47″ N, 110° 58′ 00″ O | |||
| Site 800 | Station de contrôle de secteur à Stoney Mountain | 56° 26′ 59″ N, 111° 02′ 02″ O | |||
| Site 803 | Station de détection Doppler | 56° 31′ 06″ N, 111° 47′ 05″ O | |||
| Site 806 | Station de détection Doppler | 56° 33′ 32″ N, 112° 12′ 40″ O | |||
| Site 809 | Station de détection Doppler | 56° 36′ 24″ N, 113° 04′ 15″ O | |||
| Site 812 | Station de détection Doppler | 56° 22′ 23″ N, 113° 26′ 20″ O | |||
| Site 815 | Station de détection Doppler | 55° 59′ 49″ N, 114° 05′ 24″ O | |||
| Site 818 | Station de détection Doppler | 55° 49′ 13″ N, 114° 39′ 17″ O | |||
| Site 821 | Station de détection Doppler | 55° 38′ 44″ N, 115° 01′ 14″ O | |||
| Site 824 | Station de détection Doppler | 55° 36′ 48″ N, 115° 43′ 30″ O | |||
| Site 827 | Station de détection Doppler | 55° 32′ 18″ N, 116° 07′ 19″ O | |||
| Site 830 | Station de détection Doppler | 55° 37′ 24″ N, 117° 03′ 06″ O | |||
| Site 833 | Station de détection Doppler | 55° 31′ 06″ N, 117° 43′ 30″ O | |||
| Site 836 | Station de détection Doppler | 55° 36′ 55″ N, 118° 34′ 02″ O | |||
| Site 839 | Station de détection Doppler | 55° 34′ 11″ N, 119° 13′ 21″ O | |||
| Site 842 | Station de détection Doppler | 55° 37′ 26″ N, 119° 42′ 46″ O | |||
| Site 900 | Station de contrôle de secteur à Dawson Creek | 55° 44′ 47″ N, 120° 13′ 47″ O | |||
| Site 900R | |||||
| Site 901 | |||||
| Site 903 | Station de détection Doppler | 55° 36′ 45″ N, 120° 25′ 30″ O | |||
| Site 050 | Relais à Fort Albany (Ontario) | 52° 12′ 41″ N, 81° 40′ 26″ O | |||
| Site 060 | Relais | 49° 59′ 56″ N, 81° 37′ 07″ O | |||
| Site 070 | Relais à Mount Kempis | 48° 22′ 34″ N, 80° 16′ 05″ O |
| Centre de ravitaillement | Stations desservies | Coordonnées |
|---|---|---|
| Dawson Creek, BC | 842, 900R, 903 | 55° 44′ 47″ N, 120° 13′ 47″ O |
| Sexsmith, AB | 836, 839 | |
| Falher, AB | 830, 833 | |
| Grande Prairie, AB | 824, 827 | |
| Slave Lake, AB | 809, 812, 815, 816, 821 | |
| Waterways, AB | 803, 806 | |
| Anzac, AB | 742, 745 | |
| Meadow Lake, SK | 724, 727, 730, 733, 736, 739 | |
| La Ronge, SK | 712, 715, 718, 721 | |
| Flin Flon, MB | 703, 706, 709 | |
| Cranberry Portage, MB | 700, 701 | 54° 35′ 08″ N, 101° 22′ 17″ O |
| Wekusko, MB | 624, 627, 630 | 54° 30′ 12″ N, 99° 45′ 04″ O |
| Wabowden, MB | 621 | |
| Thicket Portage, MB | 615, 618, 612 | |
| Ilford, MB | 606, 609 | |
| Gillam, MB | 600, 536, 533, 530, 527, 524, 521 | |
| Winisk, ON | 415, 416, 418, 421, 424, 427, 503, 506, 509, 512, 515, 518 | 55° 14′ 39″ N, 85° 06′ 42″ O |
| Bear Island, Nunavut | 412, 413 | |
| Kuujjuarapik, Qc | 324, 327, 330, 333, 336, 339, 342, 403, 406, 409, 410 | 55° 16′ 44″ N, 77° 44′ 21″ O |
| Schefferville, Qc | 215, 218, 221, 224, 227, 303, 306, 309, 312, 315, 318, 321 | 54° 48′ 52″ N, 66° 45′ 19″ O |
| Goose Bay, NF | 203, 206, 209, 212 | |
| Hopedale, NF | 201 | 55° 27′ 52″ N, 60° 13′ 58″ O |
Références
- McCamley 2013, p. 34.
- Whitehead 1995.
- Willis et Griffiths 2007, p. 37.
- Willis et Griffiths 2007, p. 36.
- Thorne 1979.
- (en) Eric Orlemann, LeTourneau Earthmovers, MBI Publishing, (ISBN 0-7603-0840-3, lire en ligne), p. 66.
- Skolnik 2007, p. 38.
- Skolnik 2007, p. 45.
- Christian Wolff (trad. Pierre Vaillant), « AN/FPS-23 », sur Radartutorial.eu (consulté le ).
- (en) « Mid Canada Line ».
Bibliographie
- (en) D.H. Thorne, « The Mid Canada Line, 1958 – 1965 », .
- (en) James Rennie Whitehead, Memoirs of a Boffin, (lire en ligne), chap. 7.
- (en) Nicholas Willis et Hugh Griffiths, Advances in bistatic radar, SciTech Publishing, (ISBN 978-1-891121-48-7).
- (en) Nick McCamley, Cold War Secret Nuclear Bunkers : The Passive Defence of the Western World, Pen and Sword, (ISBN 9781844155088, lire en ligne).
- (en) Nicholas Willis (dir.), Hugh Griffiths (dir.) et Merrill Skolnik, Advances in Bistatic Radar, SciTech Publishing, (ISBN 9781891121487, lire en ligne), « Fluttar DEW-Line Gap-Filler », p. 35–46.
Liens externes
- « Dew Lines and others (cartes et photos) ».
- Pour l'ensemble des points mentionnés sur cette page : voir sur OpenStreetMap (aide) ou télécharger au format KML (aide).