Radar primaire
Un radar primaire ou radar de veille (Primary Surveillance Radar en anglais) est un capteur radar classique qui illumine une large portion d’espace avec une onde électromagnétique et qui reçoit en retour les ondes réfléchies par les cibles se trouvant dans cet espace. Le terme désigne donc un système radar utilisé pour détecter et localiser des cibles potentiellement non-coopératives. Il est spécifique au domaine du contrôle aérien où on l'oppose au radar secondaire qui reçoit des informations supplémentaires du transpondeur de la cible.

Ce type de radar utilise une antenne à faible résolution verticale mais à bonne résolution horizontale. Il balaye rapidement sur 360 degrés autour du site sur un seul angle d'élévation. Il peut donc donner la distance et la vitesse radiale de la cible avec une bonne précision mais nécessite un ou des radars supplémentaires pour obtenir la position verticale et la vitesse réelle.
Les avantages du radar primaire sont donc qu'aucun équipement embarqué dans l'avion n'est nécessaire pour la détection de la cible et il peut être utilisé pour la surveillance des mouvements des véhicules au sol. Ses inconvénients sont que les cibles et leur altitude ne peuvent pas être identifiées directement. En plus, il nécessite des émissions puissantes ce qui limite sa portée.
Principe
Son fonctionnement est fondé sur le principe de l’écholocation. Les impulsions électromagnétiques de forte puissance émises par l’antenne radar sont converties en un front d’onde étroit qui se propage à la vitesse de la lumière (300 000 km/s). Celui-ci est réfléchi par les avions puis capté à nouveau par l’antenne en rotation sur son propre axe. Un radar primaire détecte tous les avions sans sélection, indépendamment du fait qu’ils possèdent ou non un transpondeur. L'opérateur écoute les éventuels échos issus de la réflexion. Donc on effectue des émissions / écoute en continu, ce qui permet de couvrir l’espace sur 360°.
Les fonctions du radar primaire se traduisent donc par des détections et mesures à l’aide de moyens radioélectriques, la détection étant la décision de présence d’une cible par la reconnaissance du signal utile.
On mesure avec un radar primaire :
- la distance D établie sur la durée de propagation de l’onde sur son trajet aller/retour ;
- un angle θ calculé sur la position d’une antenne directive en azimut ;
- une vitesse radiale par effet Doppler-Fizeau.
Un tel radar situe un objet volant sur un quart de cercle dans le plan vertical, mais peut ne pas connaître exactement l'altitude d'un avion s'il utilise seulement un faisceau plat, très mince latéralement très large verticalement. Ces informations sont alors obtenues par triangulation de plusieurs radars.
Énergie retournée


Établir l'équation du radar consiste à faire le bilan de puissance sur le trajet aller/retour du signal émis. La réponse d'une cible est liée à sa surface équivalente () définie dans cette équation et elle est une composition de surfaces élémentaires. La cible étant en mouvement, cette surface équivalente évolue à chaque instant et donne un retour qui varie. Une surface élémentaire produit un signal élémentaire reçu au niveau du radar



Le signal total sera de la forme:

Alors que les différents ne sont pas nuls, la somme des peut être nulle à cause des différences de phases de chaque terme. Le seul paramètre accessible au niveau de la station radar est la fréquence. Afin donc d'améliorer la détection, on utilise un radar avec deux émetteurs calés sur des fréquences différentes.



Mesure de distance
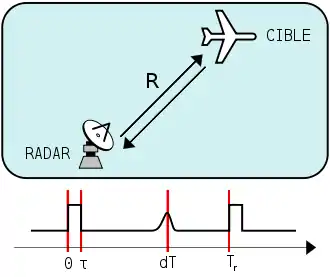


La manière de mesurer la distance à un objet est d'émettre une courte impulsion de signal radio, et de mesurer le temps que prend l'onde pour revenir après avoir été réfléchie. La distance (R) est la moitié du temps de retour de l'onde (car le signal doit aller à la cible puis revenir) multipliée par la vitesse du signal (qui est proche de la vitesse de la lumière dans le vide si le milieu traversé est l'atmosphère).
- où c est la vitesse de la lumière dans le média et le temps aller-retour

Pour = 1 microsecondes, on obtient R = 150 mètres
Pour R = 1 mille nautique, on obtient = 12,35 micro secondes
L'antenne étant à la fois émettrice et réceptrice, elle ne peut pas détecter l'onde réfléchie pendant que le signal est émis - on ne peut pas savoir si le signal mesuré est l'original ou le retour. Cela implique qu'un radar a une portée minimale, qui est la moitié de la durée de l'impulsion () multipliée par la vitesse de la lumière. Pour détecter des cibles plus proches, il faut utiliser une durée d'impulsion plus courte. Un effet similaire impose une portée maximale. Si le retour arrive quand l'impulsion suivante est émise, une fois encore le récepteur ne peut pas faire la différence. La portée maximale est donc calculée par:

- où est le temps entre deux impulsions.

Mesure de l'altitude
Un radar primaire utilisant un faisceau plat[1] a besoin pour déterminer l'altitude d'une deuxième antenne d'émission qui va balayer dans le plan vertical afin d'obtenir une information de site (d'où son appellation de "radar de site"). De cette manière, l'opérateur peut déterminer une altitude et donc des positions précises.
Cependant, il existe des radars de surveillance qui produisent un faisceau en forme de cosécante carrée en utilisant plusieurs émetteurs et qui permettent de trouver la position verticale directement[2]. De même une antenne utilisant un faisceau-crayon et faisant un balayage sur plusieurs angles obtiendra aussi l'altitude des cibles[3].
Mesure d'azimut
L'angle entre la direction du nord et celle de la cible (azimut) est déterminé grâce à la directivité de l'antenne. La directivité est la capacité de l'antenne à concentrer l'énergie rayonnée dans une direction particulière. En mesurant la direction dans laquelle est pointée l'antenne à l'instant où elle reçoit un écho. La précision de la mesure de ces angles dépend de la directivité de l'antenne. Pour une fréquence émise donnée (ou une longueur d'onde définie), la directivité d'une l'antenne est fonction de ses dimensions propres. Elle est proportionnelle à cette longueur d'onde mais inversement proportionnelle au diamètre de l'antenne.
Mesure de vitesse
On peut noter la variation de fréquence de l'onde émise par rapport à celle reçue lorsqu'on émet continuellement à une fréquence fixe. Il s'agit là de l'utilisation de l'Effet Doppler-Fizeau. Comme on ne fait pas varier la fréquence émise, on ne peut cependant pas définir la position de la cible de cette manière. En plus, on n'a que la composante radiale au radar de la vitesse. Par exemple, une cible se déplaçant perpendiculaire au faisceau radar ne causera pas de changement de fréquence alors que la même cible se déplaçant vers le radar à la même vitesse provoquera un changement maximal.
On peut également utiliser une variante de l'effet Doppler avec un radar à impulsions. Dans ce cas, on note la différence de phase entre les impulsions successives revenant de la cible. Cette méthode permet de déterminer la vitesse radiale ET la position de la cible.
Résolution
La résolution d'un radar est sa capacité à distinguer deux cibles très proches l'une de l'autre, en azimut ou en distance. Les radars de contrôle d'armes, qui demandent une grande précision, doivent être capables de distinguer des cibles espacées de quelques mètres. Les radars de veille, généralement moins précis, ne peuvent faire de distinction qu'entre des cibles espacées de quelques centaines, voire milliers, de mètres.
La résolution en distance est la capacité d'un système radar à distinguer deux ou plusieurs cibles situées dans la même direction mais à des distances différentes. La qualité de la résolution dépend de la largeur de l'impulsion émise, du type et de la taille des cibles, et de l'efficacité du récepteur et de l'afficheur. En général, la résolution en distance sera égale à une demi largeur d'impulsion. En effet, c'est la distance que parcourt le front de l'impulsion vers le radar après avoir frappé une cible avant de rejoindre l'arrière de l'impulsion. Si à ce moment l'arrière de l'onde frappe une autre cible, il est impossible de distinguer les deux retours au site radar.
La résolution angulaire est l'écart angulaire minimum qui permet au radar de distinguer deux cibles identiques se présentant à la même distance. La résolution angulaire d'un radar est déterminée par la largeur de son lobe principal qui est l'angle de chaque côté de son centre où l'intensité du faisceau tombe de -3 dB (mi-puissance). Deux cibles identiques, à la même distance ne peuvent être distinguées que si elles sont séparées de plus que cet angle.
Réduction des interférences
Le traitement du signal est nécessaire pour éliminer les interférences (dues à des sources radio autres que celle du radar) ainsi que les échos parasites. On utilise les techniques suivantes :
- Élimination en suivant seulement les échos qui bougent (Visualisation des cibles mobiles).
- Filtrage des échos en utilisant leur vitesse Doppler : les échos parasites et les interférences ont généralement des vitesses nulles.
- Corrélation avec des radars de surveillance secondaires : il s'agit d'un dispositif qui envoie depuis la cible un signal lorsqu'il reçoit un faisceau radar. Ce signal identifie la cible et, selon le cas, son altitude et sa vitesse.
- Processus adaptatif temps-espace : en utilisant une antenne réseau à commande de phase pulsée et les vitesses Doppler qu'on en obtient, on peut analyser le patron moyen des fréquences et en faire ressortir le pic qui indique la cible.
- Taux de fausse alarme constant : il s'agit de déterminer le niveau de bruit moyen continuel en chaque point de l'affichage radar et de ne garder que les échos ayant un retour supérieur à celui-ci.
- Masque digital du terrain qui permet d'éliminer les échos qui proviendraient de sous le niveau du sol.
Notes et références
- Christian Wolff et Pierre Vaillant, « Antenne à faisceau plat », sur Radartutorial.eu (consulté le ).
- Christian Wolff et Pierre Vaillant, « Antenne à faisceau en cosécante carrée », sur Radartutorial.eu (consulté le ).
- Christian Wolff et Pierre Vaillant, « Antennes à faisceau-crayon », sur Radartutorial.eu (consulté le ).
Voir aussi
Articles connexes
Liens externes
- (fr) Principe du fonctionnement du radar par Christian Wolff