Saturn V instrument unit
L'unité à instruments de la fusée Saturn V, ou en anglais « Saturn V instrument unit », souvent abrégé en « IU » dans les revues techniques ou spécialisées[1], était une structure en anneau installée au sommet du troisième étage (S-IVB) de la fusée Saturn V et du deuxième étage — également un S-IVB — de la fusée Saturn IB. Elle était installée juste en dessous des panneaux du SLA (Spacecraft/Lunar Module Adapter), désignation de l'adaptateur qui contenait et reliait le module lunaire au lanceur.
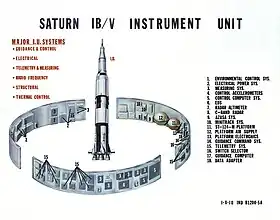
L'unité à instruments — ou « case à équipements » — contenait le système de guidage de la fusée Saturn V[2]. Parmi les ensembles électroniques installés à l'intérieur se trouvaient un ordinateur numérique — le Saturn Launch Vehicle Digital Computer —, un ordinateur de contrôle de vol analogique, un système de détection d'urgence, une plateforme de guidage inertielle, des accéléromètres de contrôle et des gyroscopes de contrôle de vitesse angulaire[2] - [3]. La case à instruments pour Saturn V fut conçue par la NASA, au Marshall Space Flight Center (MSFC), et était dérivée de l'instrument unit développée pour la fusée Saturn I[4]. Le contractant de la NASA pour la fabrication de l'IU était International Business Machines (IBM)[5].
Historique
Conception et développement

.jpg.webp)

.jpg.webp)
L'unité à instruments (IU) commença sa carrière en tant que projet « interne » dans les locaux du Marshall Space Flight Center (MSFC) à Huntsville, en Alabama, et était basée sur l'expérience acquise lors du développement de systèmes de guidage pour les fusées V2, Redstone et suivantes conçues par l'ingénieur allemand Wernher von Braun et son équipe[5].
Débutant en 1958, la conception de l'IU fut effectuée en parallèle à celle de la fusée Saturn I. La construction d'une première maquette fut réalisée à Hunstville, le [5]. Il fut alors décidé de la faire voler à bord des lanceurs de la deuxième version de la fusée Saturn I[5] — aussi désignées « Block II » —, c'est-à-dire à partir de la mission SA-5.
Lors des vols SA-1 à SA-4, effectués par des lanceurs de la première version de la Saturn I — aussi désignée « Block I » —, la fusée ne possédait que des étages supérieurs factices et aucune unité à instruments « active »[5]. L'équipement de contrôle et de guidage était installé dans des conteneurs disposés à divers endroits à l'intérieur de l'adaptateur fixé au sommet du premier étage S-I[5]. Cet équipement comprenait les systèmes de télémesure, de poursuite, un processeur de traitement des signaux de guidage, ainsi que la plateforme de stabilisation ST-90, construite par la Ford Instrument Company et initialement conçue pour et utilisée par le missile balistique Jupiter, développé pendant les années 1950[5]. Il était prévu l'installation d'un conteneur supplémentaire pour la plateforme ST-124 (en), embarquée lors de ces missions en tant que « passager » du vol, réalisant seulement des essais de vérification et de qualification pour les futurs vols des lanceurs Saturn I, Saturn IB et Saturn V[5]. Le Centre Marshall avait l'intention de rendre la ST-124 de plus en plus active lors des vols SA-5 et suivants, ainsi que de la lier à un ordinateur conçu par IBM[5].
L'instrument unit effectua ses débuts avec le vol SA-5[6], premier lancement de la deuxième version — dite « Block II » — du lanceur Saturn I[7]. Cette première version de l'IU, installée dans un segment dédié au-dessus du deuxième étage S-IV de la fusée[5], avait un diamètre de 3 900 mm pour une hauteur de 1 500 mm et avait été à la fois conçue et construite au Centre Marshall. Les équipements de guidage, télémesure, poursuite, surveillance et génération électrique étaient installés à l'intérieur de quatre conteneurs cylindriques pressurisés, attachés comme des rayons de roue de vélo autour d'un plot central au sommet du deuxième étage S-IV[5] - [8]. Ce nouvel élément structurel fut conçu pour donner plus de flexibilité aux ingénieurs et permettait de réaliser rapidement des modifications entre les lancements, en fonction des résultats obtenus lors des vols précédents ou des nouveaux besoins de la mission à venir[9].
Le centre Marshall fit voler la deuxième version de l'IU sur les lanceurs des missions SA-9, SA-8 et SA-10[9] - [Note 1]. Cette nouvelle version ressemblait à celle qui serait plus tard utilisée par les fusées Saturn IB, puis Saturn V. Si son diamètre était identique à celui de la version précédente, sa hauteur était seulement de 860 mm[9]. À la place des conteneurs pressurisés entourés par un gaz inerte, solution initialement retenue comme moyen de contrôle thermique[9], les composants de l'unité furent installés directement sur la paroi intérieure de la structure cylindrique, ce qui permit d'éliminer une partie du système de contrôle thermique de la fusée et de réaliser au passage un gain substantiel de poids[9] - [11].
L'arrivée de cette nouvelle version marqua la participation de plus en plus active des divers contractants liés au projet, parmi lesquels la Bendix Corporation (en), pour la plateforme ST-124, et l'lBM Federal Systems Division[12], qui commençait à étendre son domaine de responsabilités à tout le segment de l'IU, ainsi qu'à divers autres équipements du système de guidage[9]. Le rôle de la société IBM comme acteur principal dans la production des unités à instruments débuta en , lorsque la NASA désigna cette société comme contractant principal pour les versions destinées aux fusées Saturn IB et Saturn V de l'instrument unit[9]. Elle devint alors responsable de la fabrication, des tests et de la livraison des divers exemplaires de l'IU vers la Base de lancement de Cap Canaveral[9]. Le Centre Marshall conserva la responsabilité principale des activités lors de la fabrication et du tir des quatre premiers exemplaires de la nouvelle Saturn IB, afin de donner du temps à IBM de se familiariser avec les procédures. Si, pour la fabrication du premier exemplaire de l'IU destinée aux Saturn IB, 80 % du matériel utilisé était classé comme fourni par le Gouvernement, cette proportion fut ramenée à seulement 10 % lors de la fabrication du cinquième exemplaire de l'IU[9]. Cette troisième version de l'IU avait un diamètre de 6 600 mm pour une hauteur de 910 mm et vola sur toutes les missions des fusées Saturn IB et Saturn V.
L'unité à instruments pour la Saturn V était essentiellement similaire à celle conçue pour la Saturn IB[13], principalement parce-que pour cette dernière, les concepteurs désiraient progressivement concevoir et produire une unité déjà largement éprouvée et fiable, ne nécessitant qu'un nombre réduit de retouches de dernière minute[9]. À l'inverse de la plupart des autres composants de la fusée, qui étaient construits aux quatre coins du pays, l'unité à instruments était produite à Huntsville, IBM ayant déployé de gros moyens pour implanter ses établissements de recherche, développement, ingénierie et fabrication dans le « parc » de recherches de la ville abritant également le Centre Marshall[9]. En 1962, la société ne possédait qu'un simple bureau de ventes à Huntsville, pensant que la majeure partie des travaux pourraient être réalisés à New York[9]. Toutefois, devant la somme de travail à accomplir, la société se trouva face à de nouveaux besoins importants et décida, dès 1964, de construire quatre nouveaux bâtiments majeurs dans le Research Park de Huntsville, pour un investissement de 14 millions de dollars[9]. Ces bâtiments représentaient également une force de travail de 2 000 personnes[9]. Ils étaient dirigés par Clinton H. Grace, qui fut un membre très actif de l'organisation et la montée en puissance du complexe IBM de Hunstville et gagna une très bonne réputation auprès de Werhner von Braun lui-même[14]. En 1965, celui-ci déclara, à propos de Grace :
« Au cours de ce projet, un dicton s'était développé au Centre Marshall : « lorsque vous avez un problème, dites « Grace ! », et Grace s'occupera de vos problèmes[Note 2] ». »
Les règles de base pour la conception, la recherche et le développement de l'IU provinrent du Centre Marshall, puis furent appliqués sur les exemplaires de production livrés par IBM. Les contraintes de temps et de budget limitant fortement le nombre de vols d'essais dédiés à ce système, le nombre de mesures effectuées au cours de chacun des vols devait être élevé et devait varier fortement d'un vol à l'autre[14]. Pour ces raisons, une flexibilité sans faille devait être appliquée lors de la conception de cet élément essentiel, et les concepteurs décidèrent d'effectuer une approche modulaire, qui devait en outre grandement faciliter les opérations de vérification et d'entretien de ces systèmes[14]. Un autre point clé était la fiabilité, en particulier parce-que le programme Apollo et les fusées Saturn avaient été dès le départ pensées et conçues pour réaliser des vols habités[14]. De plus, le coût extrêmement élevé de chacune des missions de ce programme limitait fortement le désir de tester des équipements « exotiques » ou non-éprouvés lors de chacun des vols prévus[14]. Comme le déclara James T. Powell, du Marshall's Astrionics Laboratory, les ingénieurs ne pouvaient tout simplement pas se payer le luxe de recommencer un vol sous prétexte que l'IU du vol précédent avait connu une défaillance et que tous les résultats de ce vol avaient été erronés ou perdus[14]. Cette contrainte avait mené à l'emploi d'une approche plutôt conservatrice, pour la conception de cet équipement[14]. Powell fit également remarquer que certaines innovations, comme de nouvelles techniques de modulation ou la miniaturisation des composants, « auraient pu être comparées à l'invention de la roue » mais n'auraient pas pu être incorporées au programme Saturn tant qu'elles n'auraient pas indéniablement démontré qu'elles étaient opérationnellement fiables[14].
Toutefois, l'étendue des missions attribuées à la fusée Saturn V nécessitait des modifications et des améliorations supplémentaires. Ces modifications fut implémentées et testées sur les vols des lanceurs Saturn IB qui, en plus d'emporter une IU similaire à celle de Saturn V, comportaient également des missions habitées et employaient un étage S-IVB similaire[14].
Historique des missions
| Lanceur | Mission | Date de lancement | Pas de tir | Version de l'IU utilisée |
|---|---|---|---|---|
| Saturn I | SA-1 | 34 | - | |
| Saturn I | SA-2 | 34 | - | |
| Saturn I | SA-3 | 34 | - | |
| Saturn I | SA-4 | 34 | - | |
| Saturn I | SA-5 | 37B | 1 | |
| Saturn I | SA-6 | 37B | 1 | |
| Saturn I | SA-7 | 37B | 1 | |
| Saturn I | SA-9 | 37B | 2 | |
| Saturn I | SA-8 | 37B | 2 | |
| Saturn I | SA-10 | 37B | 2 | |
| Saturn IB | AS-201 | 34 | 3 | |
| Saturn IB | AS-203 | 37B | 3 | |
| Saturn IB | AS-202 | 34 | 3 | |
| Saturn V | Apollo 4 | 39A | 3 | |
| Saturn IB | Apollo 5 | 37B | 3 | |
| Saturn V | Apollo 6 | 39A | 3 | |
| Saturn IB | Apollo 7 | 34 | 3 | |
| Saturn V | Apollo 8 | 39A | 3 | |
| Saturn V | Apollo 9 | 39A | 3 | |
| Saturn V | Apollo 10 | 39B | 3 | |
| Saturn V | Apollo 11 | 39A | 3 | |
| Saturn V | Apollo 12 | 39A | 3 | |
| Saturn V | Apollo 13 | 39A | 3 | |
| Saturn V | Apollo 14 | 39A | 3 | |
| Saturn V | Apollo 15 | 39A | 3 | |
| Saturn V | Apollo 16 | 39A | 3 | |
| Saturn V | Apollo 17 | 39A | 3 | |
| Saturn V | Skylab 1 | 39A | 3 | |
| Saturn IB | Skylab 2 | 39B | 3 | |
| Saturn IB | Skylab 3 | 39B | 3 | |
| Saturn IB | Skylab 4 | 39B | 3 | |
| Saturn IB | ASTP | 39B | 3 |
Profil de mission

Les profils des vols du programme Apollo variaient considérablement entre chaque mission[18] - [19] - [20]. Cependant, toutes les missions débutèrent par un décollage sous la poussée des moteurs du premier étage. Afin de contrôler plus doucement la phase d'allumage, de stabilisation de la combustion dans les moteurs, puis le décollage de la fusée, des bras de retenue furent installés pour soutenir et retenir la fusée à quatre emplacements à la base de l'étage S-IC. Un relâchement progressif et contrôlé était effectué sur les quinze premiers centimètres de mouvement vertical du lanceur.
Après avoir dégagé la tour de lancement, un programme de vol enregistré dans l'ordinateur numérique du lanceur (en) — le Saturn Launch Vehicle Digital Computer, ou LVDC — ordonnait un mouvement en roulis du véhicule pour l'orienter de manière que la manœuvre en tangage suivante place le véhicule sur l'azimut désiré[20]. Les manœuvres en tangage et roulis étaient dictées par le programme enregistré, et n'étaient pas affectées par les mesures provenant des équipements de navigation[21]. Jusqu'à la fin de la combustion du premier étage S-IC, les commandes de guidage n'étaient données qu'en fonction du temps écoulé depuis le décollage[20].
L'arrêt des moteurs du premier étage et la séparation entre cet étage et le suivant étaient commandés lorsque l'IU recevait le signal que le niveau de carburant dans les réservoirs de l'étage était descendu jusqu'à un niveau prédéterminé[14] - [20]. Le guidage pendant les combustions des deuxième et troisième étages dépendaient à la fois du temps écoulé et des mesures de navigation, afin d'atteindre l'orbite désirée en utilisant le minimum de carburant[20].
L'arrêt des moteurs du deuxième étage était également commandé par l'IU à un niveau de carburant prédéterminé, puis les étages étaient séparés[14]. À ce moment du vol, le lanceur avait approximativement atteint son altitude orbitale, et la combustion effectuée ensuite par le troisième étage était juste assez longue pour atteindre une orbite de parking circulaire relativement basse, aux alentours de 180 × 165 km[19] - [20].
Lors des missions Apollo avec équipage, le véhicule restait en orbite terrestre pendant deux à quatre passages, le temps que l'équipage effectue des vérifications des systèmes et d'autres tâches, tandis que les stations au sol suivaient la trajectoire du véhicule. Pendant l'heure et demie après le lancement, les stations de poursuite dispersées autour du globe collectaient des données précises de la position et de la vitesse du véhicule, résumées sous le terme technique de « state vector ». Les dernières estimations étaient transmises aux systèmes de guidage à l'intérieur de l'IU et à l'ordinateur du module de commande Apollo. Lorsque la Lune, la Terre et le véhicule atteignaient la configuration géométrique optimale, le troisième étage S-IVB était rallumé pour placer le véhicule sur une trajectoire injection « translunaire » (manœuvre dite « Trans-Lunar Injection », ou TLI)[14] - [19] - [20]. Par exemple, pour la mission Apollo 15, cette poussée dura 5 min 55 s.
Après le placement du véhicule sur sa trajectoire translunaire venait la manœuvre dite « transposition, docking, and extraction »[14] - [20]. Cette manœuvre était réalisée sous le contrôle de l'équipage, mais l'IU maintenait tout-de-même l'ensemble S-IVB/IU stable pendant que le module de commande et de service (CSM) se séparait d'abord du véhicule, pivotait de 180°, puis revenait s'amarrer avec le module lunaire (LEM)[20]. Quand le CSM et le LEM étaient amarrés et verrouillés (en anglais : « hard docked », reliés par une douzaine de verrous), le nouvel ensemble se séparait de l'ensemble S-IVB/IU[20].
La dernière fonction de l'IU était ensuite de commander une très petite manœuvre, nécessaire pour écarter l'étage S-IV de la trajectoire du vaisseau spatial en route vers la Lune[14] - [20]. Cette manœuvre consistait en une petite poussée et un « dégazage » des réservoirs de l'étage, produisant une poussée supplémentaire permettant de modifier sa trajectoire[20]. Lors de certaines missions, le S-IVB fut placé sur une orbite terrestre haute ou solaire[20] - [22], tandis que pour d'autres, il fut envoyé vers la Lune pour s'y écraser[23]. Des sismomètres furent laissés sur le sol lunaire lors des missions Apollo 11, 12, 14, 15 et 16, et les étages S-IVB des missions Apollo 13, 14, 15, 16 et 17 furent volontairement déviés de leur trajectoire pour s'écraser sur la Lune[23]. Ces impacts produisirent des impulsions qui furent enregistrées par le réseau de sismomètres, afin de collecter des données sur la structure géologique de la Lune[23].
Caractéristiques
Également surnommée « The Brain » (le cerveau) ou « The Nerve Center » (le centre nerveux) par ses concepteurs[14] - [24], l'instrument unit était composée de six sous-systèmes : Structure, guidage et contrôle, contrôle environnemental, radiocommunications — pour la télémesure, la poursuite et les commandes — et la puissance électrique.
Ci-dessous les caractéristiques de la troisième version de l'instrument unit, utilisée sur les lanceurs Saturn IB et Saturn V. Ce sont des exemplaires de cette version qui sont exposés à Huntsville, Washington, Houston et à l'Apollo/Saturn V Center en Floride :
- Diamètre : 6 600 mm
- Hauteur : 914 mm
- Masse au lancement : environ 1 996 kg


Structure
La structure de base de l'IU était un cylindre court, haut de 910 mm et d'un diamètre de 6 600 mm[25], fabriqué à partir d'un sandwich de feuilles d'aluminium fixées sur un cœur en nid d'abeilles d'aluminium, d'une épaisseur de 24 mm[25]. Le cylindre était fabriqué en trois sections couvrant un angle de 120°[21] - [25] - [26], jointes entre elles par des plaques[21] à l'intérieur d'une structure intégrale et comprenant toutes les fixations nécessaires à leur installation finale dans la fusée[25]. Les bords haut et bas de ce cylindre était des anneaux faits à partir de cylindres d'aluminium extrudés collés au sandwich de nid d'abeilles[21] - [25] - [26]. Ce type de construction fut sélectionné car il présentait un rapport poids/solidité élevé, une bonne isolation acoustique, et de bonnes propriétés de conductivité thermique. L'IU devait supporter le poids des éléments installés sur sa paroi interne, ainsi que celui du vaisseau Apollo installé au-dessus, composé du module lunaire, du module de commande et de service, ainsi que les adaptateurs structurels (par ex. le SLA) et la tour de sauvetage[21] - [25]. Afin de faciliter les opérations de manutention avant son assemblage sur la fusée Saturn, deux anneaux de protection, de 15 cm de haut et peints en bleu, étaient boulonnés sur les anneaux haut et bas de l'IU. Ils étaient retirés au moment de fixer l'IU sur la fusée. La structure était fabriquée par North American Rockwell à Tulsa, dans l'Oklahoma. Edward A. Beasley était le directeur du programme lié à l'IU.
L'IU était divisée en 24 emplacements, qui étaient marqués à l'intérieur par les nombres 1 à 24 sur la surface en aluminium située juste au-dessus des anneaux de protection bleus[25] - [26]. Deux de ces emplacements contenaient des panneaux de visite[26], afin que les ingénieurs puissent facilement intervenir sur les équipements de l'IU. L'un de ces emplacement contenait le tableau de connexions ombilicales, reliant la fusée aux systèmes de soutien au sol[26].
Guidage et contrôle
Le lanceur Saturn V était guidé par de l'équipement de navigation, guidage et contrôle installé à l'intérieur de l'IU[21]. Une plateforme stabilisée dans l'espace — la plateforme inertielle ST-124-M3 (en), installée à l'emplacement no 21 — mesurait l'accélération et l'attitude du lanceur. Un ordinateur numérique — le Saturn Launch Vehicle Digital Computer (en), ou LVDC, installé à l'emplacement no 19 —, résolvait les équations de guidage, et un ordinateur analogique de contrôle de vol — installé à l'emplacement no 16 — produisait des commandes pour orienter le lanceur[21] - [25].
L'attitude du véhicule était techniquement définie selon trois axes[27] :
- L'axe de roulis (X), courait du bas au sommet de la fusée et était vertical au moment du lancement[27] - [28] ;
- L'axe de tangage (Y) était à angle droit de l'axe de roulis et était marqué sur l'extérieur de l'IU par un « +Y » au-dessus de la fenêtre de visualisation, à l'extérieur de l'emplacement no 21[27] - [28] ;
- L'axe de lacet (Z) était angle droit des axes de roulis et tangage, et était marqué par un « +Z » à l'extérieur de l'emplacement no 3[27].
La disposition de ces axes était toutefois différente avant le vol AS-204[27] - [28].
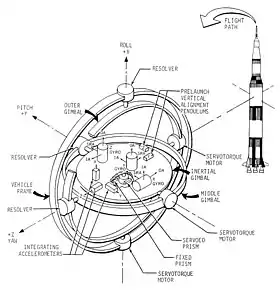
La centrale inertielle ST-124-M3, d'une masse totale de 51 kg, contenait trois cardans[28] : le cardan extérieur (Outer Gimbal), qui pouvait pivoter de 360° autour de l'axe de roulis du lanceur, le cardan milieu (Middle Gimbal), qui pouvait pivoter de ±45° atour de l'axe de lacet, et le cardan intérieur — aussi désigné « cardan inertiel » (Inertial Gimbal) —, qui pouvait pivoter de 45° autour de l'axe de tangage[28]. Ce cardan intérieur était en fait également une plateforme qui supportait plusieurs composants[28] - [29] :
- Deux pendules d'alignement vertical (Pre-Launch Vertical Alignement Pendulums), qui envoyaient avant le lancement des signaux aux systèmes de soutien au sol, qui produisaient à leur tour des signaux aux générateurs de couple gyroscopiques de la plateforme pour mettre à niveau le cardan intérieur (cardan « inertiel »). Le système d'alignement vertical alignait la plateforme avec une précision de ±2,5 secondes d'arc ;
- Deux prismes, l'un fixe (Fixed Prism) et l'autre entraîné par des servomoteurs (Servo-Actuated Prism), qui fonctionnaient dans l'infrarouge et étaient utilisés avec un théodolite externe par le biais d'une petite fenêtre d'observation installée à l'extérieur de l'emplacement no 21, afin de régler l'azimut du cardan central avant le lancement[28] - [30]. L'azimut pouvait être réglé avec une précision de ±5 secondes d'arc ;
- Trois gyroscopes à un seul degré de liberté, ayant chacun leur axe d'entrée aligné avec l'un des trois axes cités précédemment[31]. Trois générateurs de signaux, fixés sur l'axe de sortie de chacun des gyroscopes, produisait des signaux électriques proportionnels aux perturbations de couple subies par l'unité (donc par déduction de la fusée tout entière). Les signaux étaient transmis à travers les composants électroniques vers les servomoteurs installés dans les pivots des gyroscopes (Servotorque Motors), pour en « rattraper » la position initiale. La boucle fermée ainsi créée[31] (Servoloop) était telle qu'elle devait maintenir le gyroscope parfaitement immobile dans son référentiel inertiel, même si la fusée « bougeait autour », en prenant divers angles d'évolution entre le décollage et l'arrivée en orbite[28] ;
- Trois accéléromètres à asservissement[28] - [31] (Integrating Accelerometers), qui mesuraient les trois composantes de vitesse résultant de la propulsion du véhicule. Les mesures prises par ces capteurs étaient envoyées au LVDC via le Launch Vehicle Data Adapter, ou LVDA, installé à l'emplacement no 19. Dans l'ordinateur LVDC, les mesures des accéléromètres étaient combinées avec l'accélération gravitationnelle calculée afin d'obtenir les vitesse et position du véhicule[21] - [28].
Les positions angulaires des cardans sur leurs axes respectifs étaient mesurées par des résolveurs (Gimbal Angle Dual-Speed Resolvers), qui envoyaient ensuite ces mesures au LVDA[32]. L'adaptateur LVDA était l'interface d'entrées/sorties pour l'ordinateur numérique LVDC[21] - . Il réalisait le traitement nécessaire des signaux pour les rendre compréhensibles et exploitables par le LVDC[21] - [32].
L'attitude instantanée du véhicule était comparée avec l'attitude désirée préenregistrée dans la mémoire du LVDC. Les signaux de correction d'attitude provenant du LVDC étaient convertis en commandes de contrôle par l'ordinateur de contrôle de vol, ce dernier étant analogique[21]. La direction de poussée désirée était obtenue par l'orientation des moteurs de l'étage en cours de fonctionnement, afin de modifier la direction de la poussée produite par le véhicule. L'inclinaison de ces moteurs était réalisée par des actionneurs hydrauliques[21]. Dans les premier et deuxième étages (S-IC et S-II), elle était obtenue par l'orientation des quatre moteurs extérieurs, permettant de contrôler le lanceur sur ses axes de roulis, tangage et lacet. Comme le troisième étage S-IVB n'avait qu'un seul moteur J-2, un système de propulsion auxiliaire était nécessaire pour effectuer le contrôle en roulis pendant le vol. Le système de propulsion auxiliaire — dont le rôle était comparable à celui d'un RCS — assurait un contrôle en roulis pendant les phases propulsées du vol. Il effectuait également un contrôle total de l'attitude pendant les phases de vol non propulsées.
Contrôle environnemental
Le système de contrôle environnemental (en anglais : « Environmental Control System », ou ECS) maintenait un environnement d'opération acceptable pour les équipements de l'IU pendant les opérations pré-vol et le vol proprement dit[26]. L'ECS était constitué des éléments suivants[33] :
- Le système de conditionnement thermique (en anglais : « Thermal Conditionning System », ou TCS), qui maintenait la circulation d'un liquide de refroidissement pour les équipements électroniques à une température de 15 °C ±5/9 °C[26] ;
- Le système de purge pré-vol (en anglais : « Preflight air/GN2 purge system »), qui maintenait un apport d'un mélange d'air et de diazote gazeux (mélange dit « air/GN2 ») à température et pression régulées dans la baie d'équipements de l'IU eu du S-IVB[26] ;
- Le système d'alimentation des roulements à gaz (en anglais : « Gas Bearing Supply »), qui fournissait du mélange air/GN2 aux roulements à gaz de la plateforme ST-124-M3[26] ;
- De l'équipement d'échantillonnage et de détection de gaz dangereux (en anglais : « Hazardous Gas Detection »), qui surveillait l'inter-étages avant de l'IU et surveillait si s'y trouvaient des gaz dangereux[26].
Système de conditionnement thermique (TCS)
Des panneaux de conditionnement thermiques poreux, aussi désignée « plaques froides » (cold plates)[34], étaient situées à la fois dans l'IU et l'étage S-IVB, avec jusqu'à 16 plaques pour chacun de ces éléments[34] - [35]. D'une taille de 76,2 × 76,2 cm, chacune de ces plaques contenait des trous filetés prédisposés le long d'une grille carrée à intervalles de 5,1 cm pour y fixer divers instruments, ce qui facilitait leur utilisation et rendait leur emploi assez flexible[34].
Le liquide de refroidissement circulant à travers le TCS était un mélange en masse de 60 % de méthanol et 40 % d'eau déminéralisée[35]. Chacune de ces plaques était capable de dissiper au moins une chaleur équivalente à 420 W[35].
Pendant le vol, la chaleur produite par les équipements installées sur les plaques froides était dissipée dans l'espace par un échangeur de chaleur à sublimation[34]. L'eau d'un réservoir (water accumulator) sous pression[35] était exposée aux faibles température et pression de l'espace, ce qui la faisait d'abord geler, puis sublimer, prélevant ainsi de la chaleur de l'échangeur et la transférant aux molécules d'eau qui s'échappaient dans l'espace à l'état gazeux. Le mélange eau/méthanol était refroidi par circulation à travers l'échangeur[34] - [35]. L'avantage d'un système à sublimateur était qu'il se régulait tout seul en fonction de la chaleur à dissiper[35].
Système de purge air/GN2 pré-vol
.jpg.webp)
Avant le décollage, les équipements de support au sol alimentaient l'IU en air frais et filtré, qui entrait via la grande prise d'air située au milieu du panneau ombilical (position no 7)[36] - [37] et se divisait ensuite en deux canalisations au sommet de l'IU, qui parcouraient toute l'unité au niveau des supports de câbles[37]. Des évents pointant vers le bas et régulièrement espacés, provenant de ces canalisations, distribuaient de l'air à l'intérieur de l'IU[36] - [37]. Trente minutes avant et pendant les opérations de remplissage en carburant, de l'azote sous forme gazeuse (Gaseous N2, GN2) était envoyé à la place de l'air, afin de purger la case à équipements de toute potentielle accumulation de vapeurs dans son emplacement[36] - [37].
Système d'alimentation des roulements à gaz
Afin de réduire les erreurs dans la mesure de l'attitude et de la vitesse du lanceur, les concepteurs tentèrent de réduire au maximum la friction à l'intérieur des gyroscopes et accéléromètres de la plateforme inertielle en faisant « flotter » les roulements sur un fin film de diazote sec[38] - [39]. Ce diazote provenait d'une sphère contenant 56,6 litres de gaz à une pression de 207 bars[39]. Cette sphère avait un diamètre de 53 cm et était installée à l'emplacement no 22, à la gauche de la plateforme ST-124-M3[39]. Le gaz provenant de la sphère passait à travers un filtre, un régulateur de pression et un échangeur de chaleur avant de déboucher dans les roulements de la plateforme stabilisée[38] - [39]. Une fois les roulements « lubrifiés », le gaz était évacué à l'intérieur de l'IU[38] - [39].
Système de détection des gaz dangereux
Le système de détection des gaz dangereux surveillait la présence de gaz dangereux à l'intérieur du compartiment avant du S-IV et de l'IU pendant le remplissage des réservoirs en carburant[40]. Le gaz présent était échantillonné à quatre endroits : entre les panneaux 1 et 2, les panneaux 7 et 8, les panneaux 13 et 14 et les panneaux 19 et 20[40]. Des tubes partaient de ces emplacements vers l'emplacement no 7, d'où ils étaient connectés à l'équipement de soutien au sol — à l'extérieur —, qui possédait les systèmes pour détecter les gaz dangereux[40].
Système de détection d'urgence
Le système de détection d'urgence (en anglais : « Emergency Detection System », ou EDS) avait pour rôle d'identifier le développement dans le véhicule de conditions pendant son ascension qui auraient pu causer une défaillance. L'EDS réagissait à ces situations d'urgence de deux façons différentes. Si la destruction du véhicule était imminente, une séquence d'abandon automatique était initiée — avec une mise à feu de la tour de sauvetage —, mais si les conditions d'urgence se développaient lentement ou étaient d'une nature telle que l'équipage pouvait les analyser et tenter de les résoudre, seules des indications visuelles étaient envoyées à l'équipage. Une fois qu'une séquence d'abandon avait été initiée, de manière automatique ou manuelle, elle ne pouvait être interrompue et continuait jusqu'à la fin de la procédure prévue.
L'EDS était réparti le long de tout le véhicule et possédait quelques composants à l'intérieur de l'IU. Il y avait neuf gyroscopes de détection de vitesse angulaire installés à l'emplacement no 15, chacun des trois axes X, Y et Z étant surveillé par trois gyroscopes, ce qui donnait une triple redondance[41]. Le processeur de contrôle du signal, également installée à l'emplacement no 15, alimentait en énergie électrique et recevait les mesures des gyroscopes. Ces valeurs étaient traitées et envoyées au distributeur de l'EDS, à l'emplacement no 14, puis à l'ordinateur de contrôle de vol, à l'emplacement no 16. Le distributeur servait de boîte de jonction et d'interrupteur pour fournir des signaux d'urgence aux panneaux d'affichage du vaisseau si des conditions d'urgence existaient[41] - [42]. Il contenait également les circuits logiques à diodes et relais pour la séquence d'abandon automatique. Un timer électronique, à l'emplacement no 17 était activé au décollage et activait 30 secondes plus tard des relais dans le distributeur de l'EDS pour autoriser une extinction multiple de moteurs. Cette fonction était désactivée pendant les trente premières secondes du lancement, afin de prévenir une retombée du lanceur sur son pas de tir. Alors que l'abandon automatique était désactivé, l'équipage pouvait toujours déclencher un abandon manuel si un angle trop important apparaissait ou deux moteurs venaient à s'arrêter[43].
Radiocommunications
L'IU communiquait par radio en permanence avec le sol pour plusieurs raisons. Le système de mesures et de télémesure transmettait les données concernant les actions internes et les conditions de vol de la fusée. Le système de poursuite transmettait des données utilisées par la station de mission terrestre (Mission Ground Station, ou MGS) pour déterminer la position exacte du lanceur[44]. Le système de radiocommande permettait à la station terrestre d'envoyer des commandes à l'IU.
Mesures et télémesure
Environ 200 paramètres étaient mesurés sur l'IU et transmis vers le sol, afin de[45] - [46] - [47] :
- Faciliter la vérification des systèmes du lanceur avant le lancement, principalement grâce à une vérification automatisée des systèmes (Automatic Preflight Vehicle Checkout)[45] - [46] - [47] ;
- Déterminer l'état et les performances du lanceur pendant le vol, ainsi qu'après sa mise en orbite[45] - [46] - [47] ;
- Vérifier les commandes reçues pendant le vol[45] - [46] - [47] ;
- Faciliter l'analyse des paramètres à la fin de la mission (Postflight Analysis)[45] - [46] - [47].
Les paramètres mesurés incluaient l'accélération, la vitesse angulaire, le débit de masse, le vecteur position, la pression, la température, la tension, l'ampérage, la fréquence, les contraintes et de nombreux autres paramètres[44] - [48]. Les signaux émis par les capteurs étaient conditionnés par des amplificateurs ou des convertisseurs installés dans les baies de mesure[49]. Il y avait quatre baies de mesure dans l'IU, aux emplacements numérotés 1, 9 et 15, et vingt modules de conditionnement des signaux dans chacune[46] - [49]. Les signaux conditionnés étaient dirigés vers leur canal de télémesure par le distributeur de mesures, situé à l'emplacement no 10[46]. Il y avait deux canaux de télémesure. Afin de permettre à l'IU de supporter environ 200 mesures séparées, ces canaux devaient être partagés, ce qui fut réalisé grâce aux techniques de partage de fréquence et de multiplexage[44] - [46] - [50]. Les deux techniques de modulation utilisées étaient la « modulation de fréquence/modulation d'impulsions codées » (pulse code modulation/frequency modulation, PCM/FM) et la « modulation de fréquence/modulation de fréquence » (frequency modulation/frequency modulation, FM/FM)[50].
Deux multiplexeurs Model 270 (MUX-270) étaient utilisés par le système de télémesure de l'IU[44] - [51], installés aux emplacements no 9 et no 10[50]. Chacun fonctionnait en tant que multiplexeur 30×120[51] — 30 canaux principaux, chacun échantillonné 120 fois par seconde —, avec la possibilité de sous-multiplexer individuellement les canaux principaux pour former dix sous-canaux, chacun échantilloné douze fois par seconde[50] - [51]. Les signaux de sortie des MUX-270 étaient dirigés vers l'équipement PCM/DDAS Model 301[44] - [51], installé à l'emplacement no 12[50], qui à son tour activait le transmetteur VHF PCM à 245,3 MHz[50].
Les signaux FM/FM étaient répartis sur 28 sous-canaux et transmis par un émetteur FM à 250,7 MHz[50]. Les signaux FM/FM et PCM/FM étaient chacun couplés aux deux antennes de télémesure installées dans des positions opposées sur l'IU — emplacements no 10 et no 22 —, afin de maintenir en permanence la liaison avec le sol[50] - [51].
Poursuite
Des transpondeurs radar en bande C embarqués par l'IU[52] - [53] - [54] fournissaient des données de poursuite au sol, où elles étaient utilisées pour déterminer la trajectoire du véhicule[53] - [55] - [54]. Le transpondeur recevait des impulsions codées ou uniques depuis les stations terrestres et transmettait une impulsion unique dans la même bande de fréquences, de 5,4 à 5,9 GHz[53]. Des antennes classiques étaient utilisées pour la réception et la transmission. Elles étaient installées à l'extérieur des emplacements no 11 et no 23, immédiatement en dessous des antennes omnidirectionnelles du système de radiocommande CCS.
Radiocommande
Le système de communications de commandes (en anglais : « Command Communications System », ou CCS) permettait la transmission de données numériques depuis les stations terrestres jusqu'à l'ordinateur numérique LVDC[52] - [56] - [57]. Cette liaison de données était utilisée pour mettre à jour les informations de guidage ou commander certaines autres fonctions par le biais du LVDC[56] - [57]. Les données de commande émanaient du Centre de contrôle de mission, à Houston, et étaient envoyées vers des stations distantes pour être relayées au vaisseau en vol[56]. Les messages de commandes étaient émis du sol à une fréquence de 2 101,8 MHz. Le message reçu était envoyé vers le décodeur de commandes, installée à l'emplacement no 18, ou était vérifiée son authenticité, avant d'être transmis au LVDC[56]. La vérification de la bonne réception du message était réalisée par le système de télémesure de l'IU. Le CCS utilisait cinq antennes[56] :
- Une antenne unidirectionnelle, à l'extérieur des emplacements no 3 et 4 ;
- Deux antennes émettrices omnidirectionnelles, à l'extérieur des emplacements no 11 et 23 ;
- Deux antennes réceptrices omnidirectionnelles, à l'extérieur des emplacements no 12 et 24.
Énergie électrique
L'énergie électrique pendant le vol provenait de quatre batteries argent-zinc, d'une masse de 79 kg chacune, avec une tension nominale de 28 volts continus ±2 volts[58] - [59]. La batterie D10 était installée sur une étagère à l'emplacement no 5, les batteries D30 et D40 étaient sur des étagères à l'emplacement no 4, et la batterie D20 à l'emplacement no 24. Deux alimentations électriques convertissaient le courant non régulé provenant des batteries en un courant régulé continu en 56 et 5 V[58] - [59]. L'alimentation en 56 V se situait à l'emplacement no 1 et fournissait du courant à l'électronique de la plateforme inertielle ST-124-M3 et au conditionneur de signaux des accéléromètres[58]. L'alimentation en 5 V, située à l'emplacement no 12, fournissait du courant très stable en 5 volts ±0,005 volts au système de mesure de l'IU[58] - [59].
De nombreuses boîtes de jonction et distributeurs étaient présents, afin de faire cohabiter tous les systèmes de la fusée, chacun ayant des besoins électriques à la fois précis et variés[58] - [59]. Il y avait quatre distributeurs principaux et deux auxiliaires[59]. Il y avait également de nombreux interrupteurs et relais, permettant d'effectuer les tests au sol avec l'alimentation externe provenant du cordon ombilical relié à la tour de service[58] - [59]. Environ 30 secondes avant le lancement, l'alimentation de la fusée basculait de l'alimentation extérieure vers ses batteries internes[47]. Afin d'économiser l'énergie, pendant le vol, tous les systèmes n'étant pas immédiatement nécessaires étaient automatiquement coupés[47].
Exemplaires préservés ou en exposition
.jpg.webp)
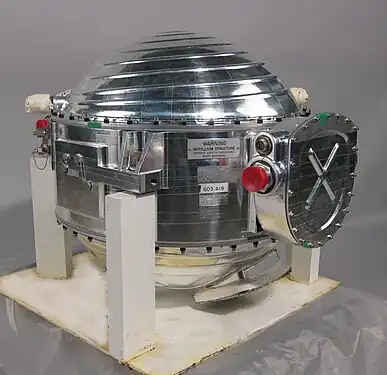
Une des cases à instruments non-utilisées — très probablement celle destinée à la mission Apollo 19[60] - [61], annulée avant la fin du programme — est actuellement (2023) exposée au Centre Steven F. Udvar-Hazy, à Chantilly, dans l'État de Virginie[60] - [61]. La plaque descriptive accompagnant l'unité exposée porte l'inscription suivante[62] :
« La fusée Saturn V, qui envoya des astronautes vers la Lune, utilisait le guidage inertiel, un système intégré qui guidait la trajectoire de la fusée. Le lanceur avait un système de guidage séparé de ceux des modules de commande et lunaire. Il était contenu à l'intérieur d'une unité à instruments comme celle-ci, un anneau situé entre le troisième étage de la fusée et les modules de commande et lunaire. L'anneau contenait les composants basiques du système de guidage — une plateforme stabilisée, des accéléromètres, un ordinateur numérique et de l'électronique de contrôle — ainsi qu'un radar, une télémesure et d'autres unités.
La plateforme stabilisée de l'unité à instruments était basée sur une unité expérimentale conçue pour la fusée allemande V2 de la Seconde Guerre mondiale. La Bendix Corporation produisit la plateforme, tandis qu'IBM conçut et produisit l'ordinateur numérique de l'unité à instruments[Note 3]. »
Galerie photographique
Ces images présentent le développement de l'Instrument Unit. Les quatre premiers lancements de fusées Saturn ne possédaient pas d'IU. Elles utilisaient des systèmes de guidage, télémesure et d'autres équipements installés au sommet du premier étage. Sur ces photographies, on peut noter qu'il existe de nombreuses variations dans les divers exemplaires d'IU fabriqués pendant toute la carrière des lanceurs Saturn : Si certains équipements furent retirés, comme le système de poursuite Azusa, d'autres furent ajoutés, par exemple une quatrième batterie pour les missions plus longues, tandis que certains composants changèrent de place à l'intérieur de l'anneau.
Ces images montrent également que certains éléments, par exemple les batteries ou la plateforme inertielle ST-124, étaient installés à l'intérieur de l'IU après l'assemblage de cette dernière au sommet de l'étage S-IVB, très probablement pour diminuer les risques liés à de potentiels chocs pendant les différentes phases de livraison et assemblage des éléments de la fusée.
- En quelques images, illustration simplifiée de l'évolution de l'instrument unit au fil du temps.
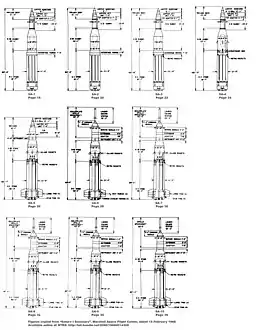
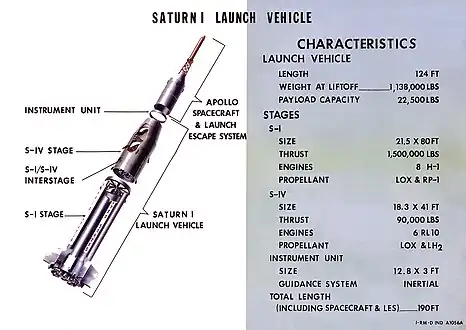 Configuration sur Saturn I.
Configuration sur Saturn I.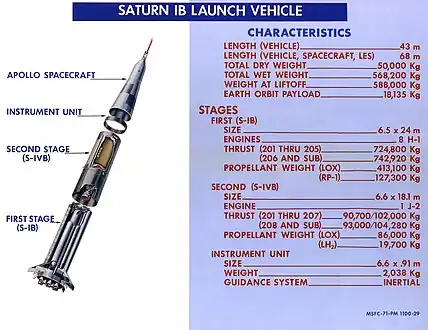 Configuration sur Saturn IB.
Configuration sur Saturn IB. Avant la conception de l'IU, les systèmes de guidage des fusées Saturn étaient installés dans des conteneurs.
Avant la conception de l'IU, les systèmes de guidage des fusées Saturn étaient installés dans des conteneurs.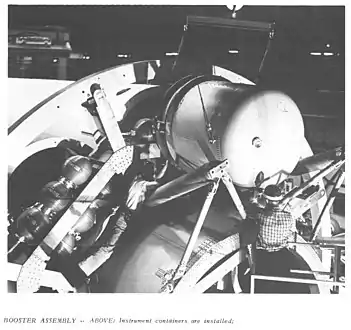 Installation des conteneurs au sommet du premier étage S-I.
Installation des conteneurs au sommet du premier étage S-I.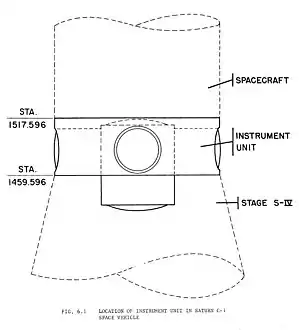 Dimensions de la première version de l'instrument unit.
Dimensions de la première version de l'instrument unit.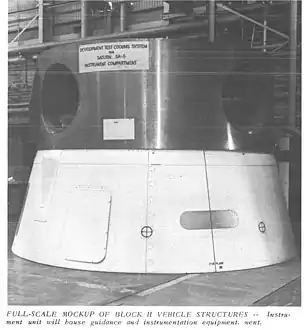 Maquette de la première version de l'instrument unit.
Maquette de la première version de l'instrument unit.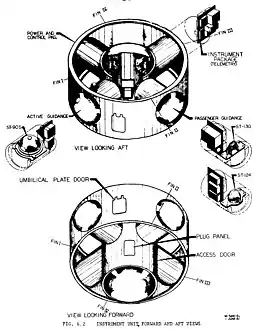 Vue éclatée de la première version de l'instrument unit.
Vue éclatée de la première version de l'instrument unit.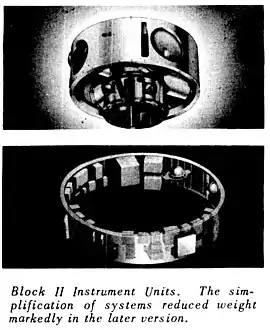 Première et deuxième versions de l'IU.
Première et deuxième versions de l'IU.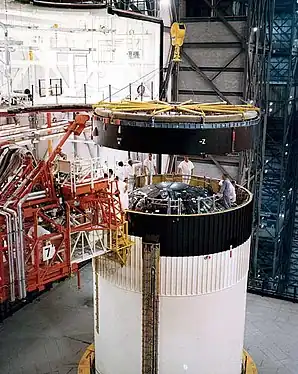 L'instrument unit no 502 au-dessus de l'étage S-IVB de la mission Apollo 6[16] - [17], dans les locaux du Vehicle Assembly Building (VAB), le .
L'instrument unit no 502 au-dessus de l'étage S-IVB de la mission Apollo 6[16] - [17], dans les locaux du Vehicle Assembly Building (VAB), le .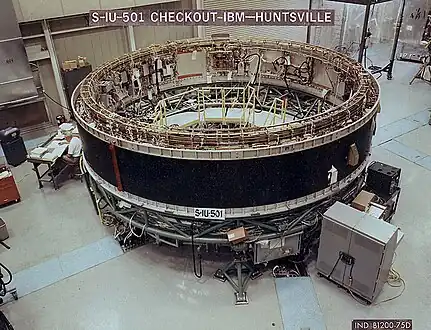
 l'IU no 501 vue de dessous, dans les locaux du VAB.
l'IU no 501 vue de dessous, dans les locaux du VAB.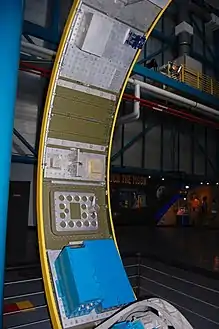 l'IU no 514, exposée à l'Apollo/Saturn V Center.
l'IU no 514, exposée à l'Apollo/Saturn V Center.
Notes et références
Notes
- Pour des raisons techniques, le vol de la mission SA-9 eut lieu trois mois avant le vol de la mission SA-8[10].
- « When you're in trouble, say 'Grace' –and Grace will take care of your problems[9]. »
- « The Saturn V rocket, which sent astronauts to the Moon, used inertial guidance, a self-contained system that guided the rocket's trajectory. The rocket booster had a guidance system separate from those on the command and lunar modules. It was contained in an instrument unit like this one, a ring located between the rocket's third stage and the command and lunar modules. The ring contained the basic guidance system components—a stable platform, accelerometers, a digital computer, and control electronics—as well as radar, telemetry, and other units. The instrument unit's stable platform was based on an experimental unit for the German V-2 rocket of World War II. The Bendix Corporation produced the platform, while IBM designed and built the unit's digital computer. »
Références
- (en) Benson et Faherty 1978, p. 332.
- (en) Bilstein 2015, p. 241.
- (en) Benson et Faherty 1978, p. 353.
- (en) Saturn V News Reference: Instrument Unit Fact Sheet, p. 2.
- (en) Bilstein 2015, p. 243–244.
- (en) Brooks et al. 2009, p. 382.
- (en) Lee Mohon, « This Week in NASA History: First Saturn I Block II Rocket Launches - Jan. 29, 1964 », NASA, (consulté le ).
- (en) The Apollo "A"/Saturn C-1 Launch Vehicle System, p. 134.
- (en) Bilstein 2015, p. 245.
- (en) Benson et Faherty 1978, p. 217–219.
- (en) Saturn I Summary, p. 36.
- (en) Brooks et al. 2009, p. 191.
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 14, section 1.2 : « Saturn Launch Vehicles ».
- (en) Bilstein 2015, p. 247.
- (en) Apollo Program Summary Report 1975.
- (en) « Saturn Vehicle History », Space Launch Report, (consulté le ).
- (en) John Duncan, « Saturn V Flight History », The Apollo Saturn Reference Page (consulté le ).
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 19–22, section 1.3 : « Saturn V Mission Profile ».
- (en) Saturn V News Reference: Instrument Unit Fact Sheet, p. 5–6.
- (en) Saturn V Flight Manual SA-507, p. 15–18, section II : « Performance. Flight Sequence ».
- (en) Bilstein 2015, p. 248–249.
- (en) Orloff 2000, « S-IVB Solar Trajectory », (lire en ligne).
- (en) Orloff 2000, « S-IVB Lunar Impact », (lire en ligne).
- (en) Lee Mohon, « Manufacturing the Saturn V Instrument Unit », NASA, (consulté le ).
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 277–282, chapitre 12 : « Instrument Unit ».
- (en) Saturn V Flight Manual SA-507, p. 151, chapitre VII : « Instrument Unit », page 7.2 : « Environmental Control System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 15, section 1.2 : « Saturn Launch Vehicles ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 299–304, section 14.2 : « ST-124M Inertial Platform Assembly ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 295–297, chapitre 14 : « Stabilized Platform ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 335–331, section 14.7 : « Azimuth Alignment System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 305–311, section 14.3 : « Gyro and Accelerometer servosystem ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 313–317, section 14.4 : « Gimbal Angle Dual-Speed Resolvers ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 283, chapitre 13 : « Environmental Control System ».
- (en) Saturn V Flight Manual SA-507, p. 151–153, chapitre VII : « Instrument Unit », page 7.2–7.4 : « Thermal Conditionning System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 283–287, section 13.1 : « Thermal Conditionning System ».
- (en) Saturn V Flight Manual SA-507, p. 153, chapitre VII : « Instrument Unit », page 7.4 : « Preflight Air/GN2 Purge System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 291, section 13.3 : « Preflight Air/GN2 Purge System ».
- (en) Saturn V Flight Manual SA-507, p. 153, chapitre VII : « Instrument Unit », page 7.4 : « Gas Bearing Supply ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 289, section 13.2 : « Gas Bearing Supply System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 293, section 13.4 : « Hazardous Gas Detection System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 249–251, section 9.2 : « Emergency Detection System ».
- (en) Saturn V Flight Manual SA-507, p. 36, section III : « Emergency Detection and Procedures ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 253–257, section 9.3 : « EDS Operation for Saturn Vehicles ».
- (en) Saturn V Flight Manual SA-507, p. 141–142, section VI : « S-IVB Stage », section 6.26 : « Instrumentation and Telemetry.
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 113–114, chapitre 5 : « Measuring and Telemetry ».
- (en) Saturn V Flight Manual SA-507, p. 174, section VII : « Instrument Unit », section 7.25 : « Measurements and Telemetry.
- (en) « Instrument Unit(IU) », Apollo Maniacs (consulté le ).
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 115–125, section 5.2 : « Measuring System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 125–128, section 5.2 : « Measuring System ».
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 131–161, section 5.3 : « Telemetry ».
- (en) Saturn V Flight Manual SA-507, p. 174–176, section VII : « Instrument Unit », section 7.25 : « Telemetry.
- (en) Benson et Faherty 1978, p. 469.
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 209–210, section 7.2 : « C-band Radar ».
- (en) Saturn V Flight Manual SA-507, p. 176, section VII : « Instrument Unit », section 7.27 : « C-band Radar.
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 205–208, chapitre 7 : « Tracking Systems », section 7.1 : « Tracking Instrumentation ».
- (en) Saturn V Flight Manual SA-507, p. 176, section VII : « Instrument Unit », section 7.27 : « Command Communications System.
- (en) Lowery 1965, p. 9.
- (en) Astrionics System Handbook for Saturn Launch Vehicles, p. 233–234, section 8.2 : « IU Power and Distribution Systems ».
- (en) Saturn V Flight Manual SA-507, p. 159–161, section VII : « Instrument Unit », section 7.10 : « Electrical Power Systems.
- (en) « Saturn V Instrument Ring », sur https://airandspace.si.edu/, National Air and Space Museum (consulté le ).
- (en) « Saturn V Instrument Unit – IU-514 at Udvar-Hazy Center », Smithsonian National Air & Space Museum (NASM) (consulté le ).
- (en) « Saturn V Instrument Unit (IU) », sur copilot.si.edu, Smithsonian Institution (consulté le ).
Voir aussi
Articles connexes
- Plateforme inertielle ST-124-M3 (en)
- Saturn Launch Vehicle Digital Computer (en)
- Apollo Guidance Computer
- Apollo Abort Guidance System
- S-IVB
- Case à équipements
- Système embarqué
- Informatique
- Saturn I
- Saturn IB
- Saturn V
- Programme Apollo
Bibliographie
![]() : document utilisé comme source pour la rédaction de cet article.
: document utilisé comme source pour la rédaction de cet article.
- (en) Charles D. Benson et William Barnaby Faherty, Moonport : A History of Apollo Launch Facilities and Operations, CreateSpace Independent Publishing Platform, coll. « The NASA History Series », , 1re éd., 656 p. (ISBN 1-4700-5267-9 et 978-1-47005-267-6, lire en ligne [PDF]).

- (en) Roger E. Bilstein, Stages to Saturn : A Technological History of the Apollo/Saturn Launch Vehicles, Andesite Press, coll. « The NASA History Series », (1re éd. 1996), 538 p. (ISBN 978-1-297-49441-3 et 1-297-49441-5, lire en ligne [PDF]).
- (en) Saturn V News Reference (Introduction Pages Only), NASA, George C. Marshall Space Flight Center, , 8 p. (présentation en ligne).
- (en) Courtney G. Brooks, James M. Grimwood, Loyd S. Swenson, Jr. et Paul Dickson, Chariots for Apollo : The NASA History of Manned Lunar Spacecraft to 1969, Dover Publications Inc., coll. « Dover Books on Astronomy », (1re éd. 1979), 576 p. (ISBN 978-0-486-46756-6 et 0-486-46756-2, lire en ligne).
- (en) The Apollo "A"/Saturn C-1 Launch Vehicle System (NASA TM X-69174. MOR-MSAT- 61-5), Hunstville, Alabama (États-Unis), Saturn Systems Office, NASA Marshall Space Flight Center, , 410 p. (lire en ligne [PDF]).
- (en) Saturn I Summary (N66-23597), Hunstville, Alabama (États-Unis), NASA Marshall Space Flight Center, , 43 p. (lire en ligne [PDF]).
- (en) Apollo Program Summary Report (JSC-09423), Houston, Texas (États-Unis), NASA Lyndon B. Johnson Space Center, (présentation en ligne).
- (en) Astrionics System Handbook for Saturn Launch Vehicles (MSFC No. IV-4-401-1 : IBM No. 68-966-0002), Hunstville, Alabama (États-Unis), NASA Marshall Space Flight Center, , 417 p. (lire en ligne [PDF]).
- (en) Saturn V Flight Manual SA-507 (MSFC-MAN-507), Hunstville, Alabama (États-Unis), NASA Marshall Space Flight Center, , 244 p. (lire en ligne [PDF]).
- (en) Apollo Program Summary Report (JSC-09423), Houston, Texas, États-Unis, NASA, (lire en ligne [PDF]).
- (en) H. R. Lowery, Saturn Instrument Unit Command System (TM X- 53350), Hunstville, Alabama (États-Unis), NASA Marshall Space Flight Center, , 45 p. (lire en ligne [PDF]).
- (en) Richard W. Orloff, Apollo By The Numbers : A Statistical Reference (NASA SP-2000-4029), Washington, DC, NASA History Division, 2000., 345 p. (ISBN 0-16-050631-X, lire en ligne).
- (en) Saturn IB/V Instrument Unit Instrumentation System Description (IBM No. 65-966-0021, MSFC No. III-5-509-1), Huntsville, Alabama (États-Unis), International Business Machines, Federal Systems Division, , 119 p. (lire en ligne [PDF]).
- (en) Ivan D. Ertel et Mary Louise Morse, The Apollo Spacecraft : A Chronology, vol. 1 : Through November 7, 1962, CreateSpace Independent Publishing Platform, coll. « The NASA Historical Series », (1re éd. 1969), 284 p. (ISBN 978-1-4954-1397-1 et 1-4954-1397-7, lire en ligne [PDF]).
- (en) David S. Akens, Saturn Illustrated Chronology : Saturn's First Eleven Years: April 1957 through April 1968, Hunstville, Alabama (États-Unis), NASA Marshall Space Flight Center, (lire en ligne).
Liens externes
- (en) Kipp Teague, « Project Apollo Diagrams », sur https://history.nasa.gov, NASA's History Division (consulté le ). (nombreux schémas de qualité à consulter sans modération)