Tianwen 1
Tianwen 1 (chinois : 天问一号 ; pinyin : ; litt. « question au ciel 1 ») est la première sonde spatiale martienne de l'Administration spatiale nationale chinoise (CNSA), développée et construite par la Société de sciences et technologies aérospatiales de Chine (CASC), le principal industriel chinois du secteur spatial. La sonde consiste en un orbiteur, un atterrisseur et un astromobile (rover) qui doit explorer la surface de la planète. Après l'échec en 2011 de la mission russe Phobos-Grunt qui emportait le petit satellite chinois Yinghuo 1, il est finalement décidé de conduire la prochaine mission chinoise de façon indépendante. Les succès du programme d'exploration lunaire Chang'e, en particulier la réussite de la mise en œuvre du système d'atterrissage de Chang'e 3 et 4, permettent à la Chine d'entreprendre une mission ambitieuse. Le projet, qui constitue la première sonde interplanétaire de la Chine, est approuvé en 2016.
Sonde spatiale

| Organisation |
|
|---|---|
| Constructeur |
|
| Domaine | Exploration de Mars |
| Type de mission | Orbiteur, atterrisseur et rover |
| Statut | Mission en cours |
| Base de lancement | Wenchang |
| Lanceur | Longue Marche 5 |
| Durée de vie |
3 mois (rover) 24 mois (orbiteur) |
| Lancement | |
|---|---|
| Insertion en orbite martienne | |
| Atterrissage sur Mars | |
| Débarquement du rover Zhurong sur le sol martien |
| Masse au lancement |
4 920 kg dont 3 175 kg (orbiteur) 240 kg (rover) |
|---|---|
| Masse instruments |
97 kg (orbiteur) 27,64 kg (rover) |
| Propulsion | Ergols liquides |
| Contrôle d'attitude | Stabilisé 3 axes (orbiteur) |
| Source d'énergie | Panneaux solaires |
| Orbite | Polaire (orbiteur) |
|---|---|
| Localisation | Utopia Planitia (rover) |
| MoRIC | Caméra moyenne définition |
|---|---|
| HiRIC | Caméra haute définition |
| MOSIR | Radar à pénétration de sol |
| MMS | Spectromètre infrarouge |
| MOMAG | Magnétomètre |
| MINPA | Détecteur de particules (neutres et ions) |
| MEPA | Détecteur de particules (haute énergie) |
| NaTeCam | Caméra stéréoscopique (rover) |
| MSCam | Caméra multispectrale (rover) |
| RoSPR | Radar à pénétration de sol (rover) |
| MarsCoDe | Spectromètre imageur laser (LIBS) (rover) |
| RoMAG | Magnétomètre (rover) |
| MCS | Station météorologique (rover) |
L'engin spatial, d'une masse totale de près de cinq tonnes, est l'une des sondes les plus lourdes lancées vers Mars et emporte un total de treize instruments scientifiques. L'orbiteur qui doit recueillir des données sur Mars durant au moins 2 ans est chargé des manœuvres orbitales. Il est équipé de deux caméras de moyenne (MoRIC) et haute résolution (HiRIC), d'un radar à pénétration de sol (MOSIR), d'un spectromètre infrarouge (MMS), d'un magnétomètre (MOMAG) ainsi que de deux détecteurs de particules (MINPA et MEPA). L'astromobile de 240 kg doit circuler à la surface de Mars durant au moins 3 mois. Son équipement comprend une caméra stéréoscopique de navigation (NaTeCam), une caméra multispectrale (MSCam), un radar à pénétration de sol (RoSPR), un magnétomètre (RoMAG), un spectromètre imageur (MarsCoDe) et une station météorologique (MCS). Les objectifs scientifiques de la mission portent sur la géologie de Mars, la présence actuelle et passée d'eau, la structure interne de la planète, l'identification des minéraux et des différents types de roches à la surface, ainsi que la caractérisation de l'environnement spatial et de l'atmosphère de Mars.
La mission décolle avec succès le depuis le centre spatial de Wenchang situé sur l'île d'Hainan à bord du lanceur lourd Longue Marche 5, et après sept mois de transit elle s'insère en orbite autour de Mars le . La sonde étudie durant trois mois le site d'atterrissage depuis une orbite de reconnaissance, puis le l'atterrisseur se pose avec succès dans la région d'Utopia Planitia.
Le , le rover Zhurong débarque de la plateforme d’atterrissage pour rejoindre la surface de Mars et entamer son périple d’exploration de la planète rouge[1] - [2].
La Chine devient la troisième puissance spatiale à parvenir à se poser sur Mars après l'Union Soviétique et les États-Unis, et la seconde à y opérer un rover, après les États-Unis. Le rover est conçu pour explorer la surface durant 90 jours martiens. L'orbiteur doit servir de relais de télécommunications pendant la mission primaire du rover, puis se placer dans une orbite plus propice aux observations tout en conservant son rôle de relais.
Contexte
Genèse du projet
Dès la fin des années 1990, les missions robotiques interplanétaires donnent lieu en Chine à de nombreuses publications dans le milieu universitaire. Un expert du Centre pour la Science Spatiale et la Physique Appliquée (aujourd'hui le Centre national des sciences spatiales) de l'Académie chinoise des sciences indique au cours de l'été 2003 que Mars fait partie des destinations étudiées par le Projet 863 (en) consacré aux projets d'exploration du Système solaire. Pour définir les objectifs et l'architecture technique d'une mission chinoise martienne, une première phase de cette étude est consacrée à une revue des missions déjà lancées par d'autres pays vers cette planète. La priorité est toutefois donnée au programme d'exploration lunaire, destination moins complexe à atteindre, et qui doit permettre à la Chine de maîtriser les technologies qui seront mises en œuvre par les missions martiennes[3].
L'échec de Phobos-Grunt et Yinghuo 1

Profitant d'une embellie économique intervenant au milieu de la décennie 2000, l'Agence spatiale russe décide de réactiver son programme d'exploration du Système solaire qui n'a plus connu de succès depuis plus de 20 ans. En 2005, elle lance le développement d'une mission ambitieuse, baptisée Phobos-Grunt, qui doit ramener des échantillons du sol de Phobos, l'une des deux lunes de Mars. Pour faciliter le financement du projet et donner de meilleures chances à son projet d'aboutir, la Russie décide de s'associer à la Chine en embarquant dans sa sonde spatiale un orbiteur martien chinois de petite taille qui doit être largué après l'insertion en orbite autour de Mars. La Russie donne ainsi l'opportunité à la Chine de lancer une mission vers Mars sans avoir à développer une sonde spatiale complète. L'accord entre les deux pays est signé le . Comme pour la sonde Chang'e 1, le petit orbiteur, baptisé Yinghuo-1, réutilise la plateforme développée pour un satellite opérationnel : il s'agit du bus mis au point pour le satellite d'observation des océans Haiyang. Le petit orbiteur de 115 kg doit étudier la magnétosphère de Mars, son champ gravitationnel, l'interaction entre le vent solaire et l'atmosphère de la planète et identifier par quels processus Mars a perdu l'eau présente à sa surface. Une fois la sonde russe Phobos-Grunt insérée sur son orbite martienne, le satellite chinois doit être largué puis mener des observations conjointes. Le développement de Yinghuo-1 se déroule sans problème et l'engin spatial est livré dans les temps à Lavotchkine, constructeur de Phobos-Grunt implanté à Moscou. Le lancement doit avoir lieu en , mais il est finalement repoussé, car le constructeur russe rencontre de nombreux problèmes de mise au point des logiciels pilotant la sonde spatiale. Le lancement par une fusée Zenit a finalement lieu le en profitant de l'ouverture de la fenêtre de lancement suivante vers Mars. Comme prévu, la sonde est placée de manière provisoire sur une orbite de parking autour de la Terre. Mais la manœuvre suivante consistant à l'injecter sur une orbite de transfert vers Mars n'est pas déclenchée, sans doute à la suite de la défaillance d'un équipement de Phobos-Grunt. L'engin spatial finit par effectuer une rentrée atmosphérique et s'écrase dans l'Océan Pacifique en [4].
Premières études
Après cet échec, la Chine décide de développer de manière autonome sa prochaine mission martienne. Comme pour son programme d'exploration de la Lune Chang'e, les chinois envisagent de développer des engins spatiaux de difficulté croissante : après avoir placé un engin spatial en orbite autour de Mars, l'étape suivante doit consister à poser un atterrisseur à la surface de Mars qui doit y délivrer un astromobile. Enfin, la mission la plus complexe doit ramener des échantillons de sol martien sur Terre. Des fonds sont affectés au Projet 863 pour étudier la trajectoire, la navigation, les capteurs, les antennes et les communications longue distance imposées par une mission vers Mars. L'Institut de Mécanique Spatiale et d'Électronique de Pékin conduit des recherches dans le domaine de l'atterrissage. Pour la phase finale de l'atterrissage, il teste un système, reposant sur des airbags, analogue à celui mis en œuvre par les missions américaines MER. La technique de l'atterrissage propulsé assisté par des radars, plus précise, mais plus complexe, lui est finalement préférée. De nombreuses architectures de mission sont étudiées : certaines comportent des pénétrateurs, un ballon atmosphérique, un petit aéronef ou proposent comme destination Déimos, l'une des deux lunes de Mars.
Finalement, le scénario d'une première mission est finalisé et une demande de financement est soumise au gouvernement chinois. La sonde spatiale martienne doit être lancée en 2016 par une fusée Longue Marche 3B. D'une masse de 2 000 kg, l'engin spatial utilise une plateforme de satellite de télécommunications de type DFH comme l'avaient fait auparavant les sondes spatiales lunaires Chang'e 1 et Chang'e 2. La sonde doit emporter six instruments scientifiques : une caméra, un radar à pénétration de sol, un spectromètre infrarouge, un spectromètre gamma, un détecteur de particules de haute énergie et un autre de particules de vent solaire. Après s'être insérée en orbite martienne, elle doit progressivement réduire son altitude en ayant recours à la technique du freinage atmosphérique afin de se placer sur une orbite polaire elliptique caractérisée par un périastre de 300 km. Les objectifs scientifiques de la mission sont l'étude de l'environnement de Mars et l'analyse de la composition de sa surface. La sonde doit également emporter un petit atterrisseur d'une masse de 50 kg, destiné à valider les techniques d'atterrissage et utilisant successivement durant sa descente vers le sol martien un bouclier thermique, un parachute et des rétrofusées. Trois sites d'atterrissage sont proposés sur les franges du pôle sud martien. Une fois posé, le démonstrateur doit transmettre des données durant 3 à 5 jours en utilisant un émetteur fonctionnant en bande UHF. Ce projet de mission martienne est finalement abandonné, faute de financement[5].
Conception et construction de la sonde spatiale
Démarrage du projet
L'atterrissage réussi sur la Lune de la sonde spatiale Chang'e 3 le permet aux responsables chinois d'envisager une mission plus ambitieuse que ce qui était prévu initialement. Il est finalement décidé de combiner les deux premières phases du programme martien, l'orbiteur et l'atterrisseur sur Mars, en une seule mission. Lors de la 22e conférence de l'International Planetarium Society (en) à Pékin le , le scientifique chinois Ouyang Ziyuan (en) annonce qu'une sonde martienne comportant un orbiteur, un atterrisseur et un rover est en développement, suivie d'une mission de retour d'échantillons d'ici 2030. Une maquette de l'astromobile est présentée lors du Zhuhai Airshow en , mais des officiels annoncent que la mission n'est pour le moment pas approuvée. Les études de faisabilité sont cependant complétées le mois suivant, et l'architecture de la mission est fixée. La sonde spatiale doit être lancée par une fusée Longue Marche 5, la seule assez puissante pour envoyer vers Mars un engin de cette masse. Une maquette est exposée lors de la foire industrielle de Shanghai en par l'Académie chinoise de technologie spatiale (CAST), puis la mission est finalement approuvée par le gouvernement en . Le projet est supervisé par l'Administration d'État pour la Science, la Technologie et l'Industrie de la Défense nationale (SASTIND) via l'Administration spatiale nationale chinoise (CNSA). Le contractant principal de la mission est la Société de sciences et technologies aérospatiales de Chine (CASC) via ses trois filiales spécialisées dans la recherche et le développement des engins spatiaux. L'Académie chinoise de technologie spatiale (CAST) est chargée de concevoir l'atterrisseur et l'astromobile, l'Académie de Shanghai pour la technologie des vols spatiaux (SAST) doit fournir l'orbiteur ainsi que quelques sous-systèmes, et enfin l'Académie chinoise de technologie des lanceurs (CALT) fournit la fusée Longue Marche 5 qui doit lancer la mission. Les caractéristiques des 13 instruments scientifiques embarqués à bord de la sonde spatiale sont annoncées le . Le décollage de la mission initialement prévu en 2018 est rapidement reporté à [6] - [7].
Développement de la sonde
Il est décidé que l'atterrisseur utilisera la méthode classique d'atterrissage sur Mars reposant sur une capsule et un bouclier thermique, puis un parachute et enfin un propulseur à poussée variable pour ralentir la descente jusqu'au sol. La surface martienne pouvant être accidentée et comporter de nombreux rochers qui mettraient en danger la mission, le système d'atterrissage développé pour les sondes lunaires Chang'e 3 et Chang'e 4 est largement réutilisé. Un radar et une caméra sur l'atterrisseur comparent durant la descente les images prises du sol avec une base de données internes pour sélectionner le lieu le plus sûr. Le délai des télécommunications entre Mars et la Terre pouvant atteindre 22 minutes, un système de navigation autonome est développé pour le rover. En 2015 une trentaine de tests du parachute supersonique sont conduits, puis les premiers essais de la phase de vol stationnaire et d'évitement des obstacles de l'atterrissage sont menés en à Huailai par l'Institut de Mécanique Spatiale et d'Électronique de Pékin, à l'aide d'un exemplaire de test de l'atterrisseur suspendu à un portique pour simuler la gravité martienne. En , l'Académie de technologie aérospatiale de la propulsion liquide complète les tests du moteur de l'atterrisseur, puis le directeur du Centre national des sciences spatiales (NSSC), Wang Chi (en), annonce que la sonde est en train d'être intégrée. En s'achève avec succès une série de quatre lancements de fusées-sondes Tianying 6 depuis le centre de lancement de Korla au Xinjiang afin de tester le déploiement du parachute supersonique à une altitude comprise entre 44 et 55 km pour simuler la fine atmosphère martienne[8]. Le a lieu à Hengshui un test du radar à pénétration de sol de la mission à l'aide d'un ballon atmosphérique qui l'emporte à quelques centaines de mètres du sol[9]. Un dernier test de la phase finale de la descente a lieu le à Hualai devant un parterre d'envoyés et d'ambassadeurs de 19 pays étrangers, dont la France, l'Italie, le Brésil ou encore l'Union Européenne et l'Union Africaine. Le directeur de l'Administration spatiale nationale chinoise, Zhang Kejian, annonce alors que la mission décollera à l'été 2020, comme prévu[10] - [11] - [12].
Objectifs de la mission
Il s'agit de la première mission interplanétaire de la Chine, ainsi que de sa première sonde indépendante à destination de Mars. Le but est donc tout d'abord de valider les technologies de communications et de contrôle dans l'espace profond, la mise en orbite autour de la planète et l'atterrissage à sa surface. L'orbiteur doit également permettre de repérer un site pour un futur retour d'échantillons martiens.
D'un point de vue scientifique, la mission doit répondre à 5 objectifs :
- Étudier la morphologie et la structure géologique de Mars, ainsi que son évolution et ses causes (voir Géologie de Mars). Pour ce faire, la sonde analysera la topographie de la planète avec des données précises de régions caractéristiques telles que le lit asséché de rivières, le reliefs des volcans, l'érosion du vent, les glaciers aux pôles, etc. Les deux caméras présentes sur l'orbiteur sont destinées à cet objectif.
- Étudier les caractéristiques de la surface et des couches souterraines du sol martien, ainsi que la distribution de la glace d'eau. C'est le rôle des radars présents sur l'orbiteur et l'astromobile.
- Étudier la composition et le type des roches ainsi que les minéraux et les éléments présents à la surface de Mars. Analyser les minéraux carbonatés ou météorisés présents dans les anciens lacs, rivières et autres paysages issus de la présence passée d'eau sur la planète, tels que les hématites, les silicates lamellaires, les hydrates de sulfates ou encore les minéraux de perchlorate afin d'établir le lien avec le passé aqueux de Mars. Les spectromètres à bord de l'orbiteur et du rover ainsi que la caméra multispectrale sont destinés à cet objectif.
- Étudier l'ionosphère, le climat, les saisons et plus globalement l'atmosphère de Mars, aussi bien dans son environnement spatial proche qu'à sa surface. C'est le rôle des deux détecteurs de particules présents sur l'orbiteur ainsi que de la station météorologique du rover.
- Étudier la structure interne de Mars, son champ magnétique, l'histoire de son évolution géologique, la distribution interne de sa masse et son champ gravitationnel. Les magnétomètres ainsi que les radars présents sur l'orbiteur et le rover sont destinés à cet objectif[13].
Site d'atterrissage
Critères de sélection
Le site d'atterrissage de la sonde spatiale chinoise est sélectionné sur la base de critères particulièrement contraignants pour réduire les risques d'échec :
- Une latitude assez proche de l'équateur pour faciliter les télécommunications et accroître l'ensoleillement ; cela permet de disposer de plus d'énergie (produite par les panneaux solaires) et de faciliter le contrôle thermique du rover (utilisation réduite des résistances chauffantes).
- Une altitude du site peu élevée ; ce qui laisse plus de temps au parachute et à l'atterrisseur pour décélérer l'engin spatial.
- Un sol faiblement incliné pour ne pas perturber les mesures du radar chargé de mesurer l'altitude pendant la descente et pour garantir la stabilité de l'atterrisseur, une fois celui-ci posé.
- Un site comportant une quantité de poussière réduite pour ne pas gêner les déplacements du rover et rendre plus facile son contrôle thermique et sa production d'énergie (la poussière masque les panneaux solaires).
- Une densité de rochers peu élevée pour limiter le risque d'un échec de l'atterrissage et faciliter les déplacements du rover.
- Une vitesse locale du vent réduite pour faciliter la descente sous parachute et le contrôle thermique du rover.
- Un site visible depuis la Terre au moment de l'atterrissage, afin que le rover puisse communiquer directement avec le contrôle au sol durant cette phase[14].
Choix du site d'atterrissage
Les deux régions de Mars envisagées pour l'atterrissage du rover sont annoncées en au cours d'une séance du Comité des Nations unies pour l'utilisation pacifique de l'espace extra-atmosphérique. Les deux sites, caractérisés par une altitude faible, une absence de reliefs et d'obstacles et une latitude comprise entre 5° et 30° sont :
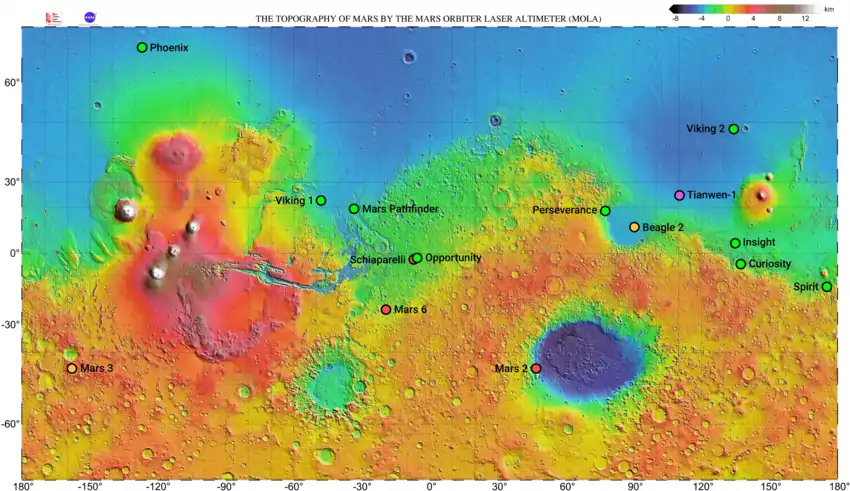
- Chryse Planitia est une plaine d'environ 1 700 km de largeur. La région possède un riche passé hydrologique illustré de par l'abondance de ses vallées fluviales. Les sondes américaines Viking 1 et Mars Pathfinder ont également atterri dans cette région.
- Isidis Planitia (région également sélectionnée pour l'atterrissage de la mission Mars 2020 de la NASA) est un bassin d'impact de 1 200 km de diamètre, ainsi qu'une bande s'étendant sur Utopia Planitia. La zone d'atterrissage comprend également la partie occidentale de la région d'Elysium Mons[9].
Le site d'Utopia Planitia est finalement retenu[15].
Caractéristiques techniques
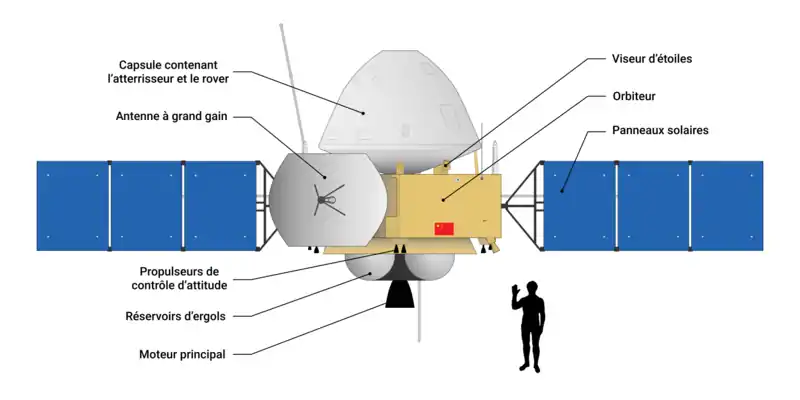
La sonde spatiale Tianwen 1 comprend quatre sous-ensembles : l'orbiteur, le véhicule de rentrée, l'atterrisseur et le rover. Durant le transit entre la Terre et Mars, puis durant la phase de reconnaissance, l'orbiteur fournit la propulsion, l'énergie et les télécommunications à l'ensemble de la sonde. L'orbiteur et le rover disposent de panneaux solaires afin de recharger leurs batteries et ce sont eux qui sont chargés de l'étude scientifique de Mars. Le véhicule de rentrée et l'atterrisseur ont pour rôle de déposer en douceur le rover à la surface.
Caractéristiques générales
L'orbiteur d'une masse de 3 175 kg au décollage a la forme d'un prisme hexagonal. Il possède 2 ailes symétriques comportant chacune 3 panneaux solaires fournissant l'énergie, ainsi qu'un moteur principal, pour les manœuvres orbitales d'importance, d'une poussée de 3 000 N[16] - [14]. Il dispose également d'un total de 20 propulseurs dont 8 de 120 newtons et 12 de 25 newtons de poussée pour le contrôle d'attitude et les petites corrections de trajectoire[17]. L'orbiteur est équipé de caméras de navigation capables de repérer automatiquement Mars à une distance de 10 millions de kilomètres. À l'aide du diamètre apparent et de la position de la planète, il calcule ensuite la vitesse et la position relative de la sonde par rapport à Mars[18].
Télécommunications
L'orbiteur possède 3 types d'antennes pour les télécommunications dont une antenne parabolique émettrice-réceptrice grand gain orientable de 2,5 mètres de diamètre et d'une masse de 80 kilogrammes, une antenne émettrice à gain moyen, ainsi que plusieurs antennes omnidirectionnelles de faible gain[19]. En fonctionnement normal, les données portant le contrôle de l'orbiteur vers la Terre sont transmises avec un débit de 2 kbit/s et les commandes sont reçues avec un débit de 16,384 kbit/s. En mode survie, lorsque l'engin spatial ne parvient plus à pointer ses antennes directionnelles vers la Terre, les communications passent par les antennes omnidirectionnelles et le débit chute à 7,812 5 bit/s vers la Terre et à 32 bit/s dans le sens inverse. Le transfert des données scientifiques vers la Terre se fait avec un débit compris entre 16 kbit/s et 4,096 Mbit/s[20].
Véhicule de rentrée
Pour protéger l'atterrisseur et l'astromobile durant la phase de rentrée dans l'atmosphère de Mars, ils sont encapsulés dans un véhicule de rentrée, comparable à une capsule. Celui-ci est composé d'un bouclier thermique avant, conçu pour résister à la forte chaleur que subit cette partie de la sonde, d'un bouclier arrière et d'un module contenant le parachute. Le véhicule de rentrée a la forme d'une sphère-cône de demi-angle de 70°, angle hérité de l'expérience des sondes de la NASA qui l'ont précédé, et ne dispose pas de propulseurs propres. La rentrée est donc balistique. La capsule a un diamètre de 3,400 m pour une hauteur de 2,607 m, tandis que le parachute a un diamètre de 15,96 m une fois déployé[16] - [14].
Le bouclier thermique de la capsule de rentrée est fait dans un matériau ablatif (c'est-à-dire qu'il se désagrège durant la rentrée pour évacuer la chaleur) très léger renforcé d'une structure en nid d'abeille. Sa conception est héritée du bouclier thermique des capsules Shenzhou et lunaires telles que celui testé par Chang'e 5 T1. L'épaisseur du bouclier est étudiée pour se concentrer sur les régions les plus sensibles en fonction de la charge aérodynamique afin de diminuer sa masse au maximum. D'autres parties de la capsule, notamment la trappe d'accès et les anneaux d'étanchéité, utilisent un matériau plus lourd en raison de la charge subie. La partie arrière de la capsule subissant relativement peu d'échauffement durant la rentrée est faite dans un matériau très léger et ablatif, ce qui joue un rôle important dans la réduction de la masse de la sonde. Les trois différents matériaux de la capsule de rentrée sont étudiés pour résister aux importantes variations de température durant le transit vers Mars qui pourrait les endommager[21].
Atterrisseur
L'atterrisseur est l'élément chargé de la dernière phase de la descente : il doit déposer en douceur l'astromobile sur le sol martien. Il est fourni en énergie par une batterie lithium-fluorocarbone, la première utilisation de cette technologie dans une sonde spatiale ; cela permet d'assurer la stabilité de l'apport en énergie et d'alléger ce dernier de 5 kg[22]. Après s'être séparé du véhicule de rentrée, il met à feu son moteur principal YF-36 de 7 500 newtons à poussée variable, hérité des sondes spatiales Chang'e 3 et 4, pour ralentir et contrôler la descente[23]. Lorsque l'atterrisseur est en vol stationnaire, il analyse le sol à l'aide d'un capteur laser et d'une caméra, et compare les relevés avec une base de données pour choisir un site dégagé. Il dispose durant cette phase de 26 propulseurs dont 20 de 250 newtons et 6 de 25 newtons de poussée pour se déplacer horizontalement[17]. Au moment du contact avec le sol, la vitesse résiduelle est amortie à l'aide de quatre pieds. L'atterrisseur comporte une antenne omnidirectionnelle et deux rails qui sont déployés pour permettre au rover de rouler jusqu'au sol ainsi que quelques équipements scientifiques[16] - [14].
Caractéristiques générales
L'astromobile de la mission Tianwen 1, Zhurong (dieu du feu), reprend l'architecture des rovers lunaires jumeaux Yutu et Yutu 2 et bénéficie ainsi d'un bon retour d'expérience. Il a une masse de 240 kg, mesure 200 × 165 × 80 cm en position repliée, et 260 × 300 × 185 cm en position déployée (L × l × h). Un mât soutient les deux caméras de navigation ainsi que la caméra multispectrale. Pour se déplacer, le rover dispose de 6 roues redondantes de 30 cm de diamètre disposées sur un système de suspension actif. Elles ont chacune un moteur individuel[24]. De plus, elles comportent toutes un moteur supplémentaire agissant sur la direction, ce qui permet au rover de tourner sur lui-même et de se déplacer latéralement ("en crabe")[23]. En raison du délai des télécommunications avec la Terre, qui peut atteindre 22 minutes, le rover utilise un système de navigation autonome. Il a une vitesse maximale de 200 mètres/heure et une vitesse de navigation de 40 m/h. Il peut franchir des obstacles de 30 cm de haut et gravir des pentes de 30° d'inclinaison[20].
Énergie et contrôle thermique
Son énergie lui vient de 4 panneaux solaires à haut rendement qui se déploient peu après l'atterrissage, deux d'entre eux pouvant s'incliner pour maximiser la production d'énergie[20]. Il réalise ses opérations uniquement l'après-midi, car la température de la surface de Mars est alors à son point le plus élevé de la journée, ce qui est optimal pour le fonctionnement des instruments scientifiques et une consommation minimale d'énergie. Sur la face supérieure du rover, on trouve deux larges fenêtres circulaires exposant au soleil de l'undécane. Son point de fusion se situant à environ −25 °C, il se liquéfie durant la journée pour accumuler de l'énergie. Il se solidifie ensuite durant la nuit, relâchant la chaleur accumulée afin de contribuer au contrôle thermique du rover[25]. S'il détecte que l'apport en énergie est faible, par exemple en cas de tempête de poussière, il se place automatiquement en mode survie, attendant que la température et l'ensoleillement s'améliore pour reprendre ses opérations normales[26]. Il est conçu pour une durée de vie de 90 jours martiens[16].
Télécommunications
Pour les communications avec la Terre, le rover utilise une antenne parabolique grand gain orientable de 36 cm de diamètre[24]. Il est capable de communiquer directement vers la Terre à un débit de 16 bit/s, essentiellement pour envoyer des informations sur son statut. L'essentiel des télécommunications se font entre le rover et l'orbiteur, qui sert alors de relai. Chaque jour, 30 mégabits en moyenne sont transmis pendant une fenêtre de 8 à 10 minutes en bande UHF. Le rover peut également communiquer en bande X, mais en raison de restrictions liées à la puissance électrique disponible, le téléchargement des données ne se fait qu'une fois tous les 3 jours lorsque l'orbiteur est à l'apoapside de son orbite. Le débit est alors de 32 kbit/s pour un total de 50 mégabits en moyenne[20].
Instruments scientifiques
La sonde emporte au total 13 instruments scientifiques, répartis entre l'orbiteur et le rover[27].
Orbiteur
| Instrument | Type d'instruments | Objectifs | Principales caractéristiques | Masse | Consommation électrique | Volume de données produit |
|---|---|---|---|---|---|---|
| MoRIC | Caméra | Étudier la topographie et la structure géologique de la surface martienne | 4 096 × 3 072 pixels ; résolution spatiale supérieure à 100 mètres à 400 kilomètres d'altitude | 3,5 kg | 20 watts | 16 Mo/s |
| HiRIC | Caméra haute définition | Étudier des structures dynamiques et des objets géomorphologiques de la surface martienne | Résolution spatiale supérieure à 2,5 mètres et jusqu'à 0,5 mètre en mode panchromatique ; supérieure à 10 mètres et jusqu'à 2 mètres en mode couleur | 43 kg | 127 watts | 2 254 Mo/s |
| MOSIR | Radar à pénétration de sol | Étudier la structure géologique du sous-sol martien | Jusqu'à 100 mètres de profondeur pour le sol et 1 000 mètres pour la glace ; résolution verticale de l'ordre du mètre | 28 kg | 67 watts | 1 Mo/s |
| MMS | Spectromètre infrarouge | Analyser la composition chimique de la surface martienne | Résolution spectrale entre 12 et 20 nanomètres ; résolution spatiale : 2,8 kilomètres | 7,2 kg | 48 watts | 3,8 Mo/s |
| MOMAG | Magnétomètre | Étudier les interactions entre l'ionosphère martienne, sa magnéto-gaine et le vent solaire | Plage de mesure : ± 2 000nanoTesla ; résolution supérieure à 0,01 nanoTesla | 7,5 kg | 3,8 watts | 1,95 ko/s |
| MINPA | Détecteur de particules | Étudier les causes de la disparition de l'atmosphère martienne | Ions entre 5 eV et 25 KeV ; particules neutres entre 50 eV et 3 KeV | 4,7 kg | 11 watts | 18 ko/s |
| MEPA | Détecteur de particules | Étudier les particules dans l'environnement interplanétaire et martien | Électrons entre 0,1 et 12 MeV ; protons entre 2 et 100 MeV ; ions et particules ɑ entre 25 et 300 MeV | 3,1 kg | 8,4 watts | 1,3 ko/s |
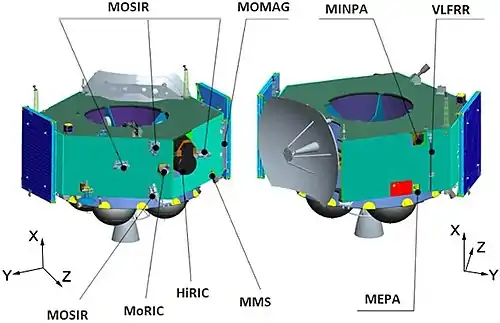
L'orbiteur emporte en tout 7 instruments scientifiques, dont quatre sont des instruments de télédétection destinés à l'observation de Mars. Ces instruments sont :
- MoRIC (Moderate Resolution Imaging Camera) est une caméra moyenne résolution chargée d'imager la surface de la planète de manière globale afin d'obtenir des informations sur les paysages et la topographie de Mars, ainsi que sa structure géologique. Elle sera utilisée durant l'orbite de transfert afin de photographier la Terre et la Lune, puis Mars durant son approche. Une fois en orbite autour de la planète, l'instrument est utilisé pour photographier en 3 dimensions les sites d'atterrissages visés, puis le site réel après que l'atterrisseur se soit posé, lorsque l'altitude de l'orbiteur est inférieure à 800 km et l'élévation du soleil supérieure à 5°. La caméra dispose de 4 modes de fonctionnement : standby, bilan de santé, prise d'image statique, et étalonnage (une fois par mois). Elle fonctionne dans le spectre visible et a une résolution de 100 mètres, avec une largeur de champ de 400 × 400 km et une définition de 4 096 × 3 072 pixels[13] - [29].
- HiRIC (High Resolution Imaging Camera) est une caméra haute résolution chargée d'obtenir des images précises de zones caractéristiques de la surface pour étudier la topographie et les paysages de Mars, et afin de repérer un site pour une future mission de retour d'échantillons martiens. Elle a notamment pour but d'observer des structures dynamiques telles que des dunes, des avalanches ou des glaciers et des objets géomorphologiques typiques tels que des cratères d'impact, des volcans, des canyons, des collines ou encore des falaises. Elle étudie également des structures formées par l'érosion du vent, ou encore des lits de rivière asséchée. L'instrument est utilisé pour photographier en 3 dimensions les sites d'atterrissages visés, puis le site réel après que l'atterrisseur se soit posé, lorsque l'altitude de l'orbiteur est inférieure à 800 km et l'élévation du soleil supérieure à 10°. La caméra dispose de 4 modes de fonctionnement : prise d'image, bilan de santé, contrôle thermique et mise au point. À une altitude de 265 km, elle a en mode panchromatique une résolution supérieure à 2,5 mètres, voir à 0,5 mètre s'il s'agit d'une zone d'importance. En mode couleur et à la même altitude, elle atteint une résolution supérieure à 10 mètres, voir à 2,0 mètres s'il s'agit d'une zone d'importance. Dans les deux cas sa largeur de champ est de 9 km. Ses caractéristiques en font une caméra de résolution comparable à l'instrument HiRISE embarqué à bord de la mission Mars Reconnaissance Orbiter de la NASA, mais avec une largeur de champ supérieure (9 contre 6 km). L'instrument est construit par l'Institut d'optique, de mécanique fine et de physique de Changchun (en)[13] - [30] - [29].
- MOSIR (Mars Orbiter Scientific Investigation Radar) est un radar chargé d'analyser la surface et le sous-sol de la planète afin d'en étudier la structure et la distribution de glace d'eau souterraine. Lors du voyage entre la Terre et Mars, il détecte le spectre radio très basse fréquence de l'environnement interplanétaire. L'instrument est sensible entre 10 et 20 MHz et entre 30 et 50 MHz, il est capable de sonder jusqu'à 100 mètres de profondeur avec une résolution de 1 mètre[13]. L'instrument est construit par l'Institut de Recherche sur l'Énergie Électrique de Chine (China Electric Power Research Institute ou CEPRI)[31].
- MMS (Mars Mineralogical Spectrometer) est un spectromètre infrarouge chargé d'analyser les minéraux présent sur Mars et leur distribution. Il étudie la composition chimique globale de la planète et son évolution, ainsi que la distribution des ressources. Il est sensible dans le visible et le proche infrarouge entre 0,45 et 1,05 μm avec une résolution supérieure à 10 nm et dans l'infrarouge proche et intermédiaire entre 1,00 et 3,40 μm avec une résolution supérieure à 12 nm[13].
Les trois instruments restants sont destinés à l'étude des particules et à l'environnement in-situ de l'orbiteur. Ces instruments sont :
- MOMAG (Mars Orbiter Magnetometer) est un magnétomètre chargé d'étudier l'environnement spatial magnétique de Mars. Coopérant avec le magnétomètre présent sur le rover de la mission, il analyse les courants dans l'ionosphère martienne et ses caractéristiques telles que sa conductivité. En détectant le champ magnétique de Mars et du vent solaire, il étudie les interactions entre l'ionosphère martienne, le vent solaire et la magnétogaine de la planète. L'Institut de Recherche Spatiale (en allemand : Institut für Weltraumforschung ou IWF) de l'Académie autrichienne des sciences (Österreichische Akademie der Wissenschaften) contribue à cet instrument, notamment en apportant son aide à son étalonnage. L'instrument a une plage de mesure de ± 2 000nT, avec une résolution supérieure à 0,01 nT et une précision de 0,1 nT[13] - [32].
- MINPA (Mars Ion and Neutral Particle Analyzer) est un détecteur de particules qui étudie la fuite de l'atmosphère martienne, le mécanisme de l'interaction entre le vent solaire et l'atmosphère martienne ainsi que le mécanisme d'accélération des particules neutres près de l'arc de choc martien. L'instrument est capable de détecter les ions de faible énergie entre 5 eV et 25 KeV avec un angle de vue de 90° × 360° et une résolution angulaire de 11,2° × 22,5°, et est capable de détecter les particules neutres de faible énergie entre 50 eV et 3 KeV avec un angle de vue de 15° × 160° et une résolution angulaire de 10° × 25°[13].
- MEPA (Mars Energetic Particles Analyzer) est un détecteur de particules chargé d'étudier les caractéristiques, le flux, la composition élémentaire et les variations du spectre énergétique des particules présentes dans l'environnement spatial proche de Mars et durant le transit entre la Terre et Mars, ainsi que de cartographier la distribution spatiale des radiations de particules énergétiques. En coopération avec Mars Magnetometer et Mars Ion and Neutral Particle Analyzer il étudiera l'interaction entre les particules énergétiques et l'atmosphère de la planète, l'influence des particules solaires énergétique (en), l'accélération des particules et le mécanisme d'échappement de l'atmosphère martienne. L'instrument est sensible aux électrons entre 0,1 et 12 MeV, aux protons entre 2 et 100 MeV, aux particules α et aux ions lourds entre 25 et 300 MeV. Il est capable de détecter les éléments chimiques de l'hydrogène au fer (1 ≤ Z ≤ 26)[13]. L'instrument est construit pas l'Institut 510 en coopération avec l'Institut de Physique Moderne (Institute of Modern Physics) de l'Académie chinoise des sciences[33].
Astromobile (rover)
| Instrument | Type d'instruments | Objectifs | Principales caractéristiques | Masse | Consommation électrique | Volume de données produit |
|---|---|---|---|---|---|---|
| NaTeCam | Caméra stéréoscopique | Étudier la topographie et la structure géologique de la surface martienne | Deux caméras de résolution 2 048 × 2 048 pixels | 0,7 kg | 1,8 watt | |
| MSCam | Caméra multispectrale | Étudier les roches martiennes et leur composition | 2 048 × 2 048 pixels ; 9 spectres échelonnés de 480 à 1 000 nanomètres ; résolution spectrale entre 12 et 50 nanomètres | 1,65 kg | 8 watts | 25 Mo/s |
| RoSPR | Radar à pénétration de sol | Étudier la structure géologique du sous-sol martien | Canal 1 : jusqu'à 100 mètres de profondeur avec une résolution de l'ordre du mètre ; Canal 2 : jusqu'à 10 mètres de profondeur avec une résolution de l'ordre du centimètre | 6,1 kg | 26,5 watts | 1 Mo/s |
| MarSCoDe | Spectromètre laser LIBS infrarouge | Analyser la composition chimique de la surface martienne | Spectromètre laser : plus de 10 éléments détectables et résolution spectrale entre 0,1 et 0,3 nanomètre ; spectromètre passif entre 850 et 2 400 nanomètres avec une résolution spectrale entre 3 et 12 nanomètres | 16,4 kg | 64 watts | 1 Mo/s |
| RoMAG | Magnétomètre | Détecter le champ magnétique martien et les courants de sa ionosphère | Plage de mesure : ± 2 000nanoTesla ; résolution supérieure à 0,01 nanoTesla | 1,05 kg | 5,5 watts | 1 Mo/s |
| MCS | Station météorologique | Étudier la température, le vent, la pression atmosphérique, et le son à la surface de Mars | Température : entre −130 et +70 °C, résolution : 0,1 °C ; résolution vitesse du vent : ~0,3 m/s, et direction : 5° ; pression : entre 1 et 1 000 Pa, résolution : 0,1 Pa ; son : entre 20 Hz et 20 kHz | 1,75 kg | 11 watts | 1 Mo/s |
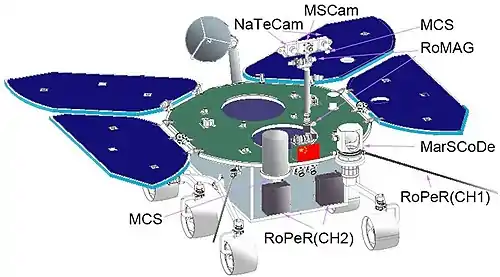
L'astromobile emporte en tout six instruments scientifiques. Contrairement aux rovers américains tels MER, Curiosity ou Perseverance, il ne dispose pas d'un bras robotique permettant de positionner des instruments au contact des roches ou du sol.
- NaTeCam (Navigation and Terrain Camera) est un ensemble de 2 caméras chargées de fournir des images sur la topographie de la surface de Mars afin de mesurer la pente et d'identifier les ondulations et les irrégularités du terrain. Elles sont utilisées pour réaliser des photos panoramiques à 360° dès que l'astromobile est devenu opérationnel et pour guider celui-ci durant ses déplacements. Les deux caméras fournissent des images en couleurs avec une résolution de 2 048 × 2 048 pixels[14] - [29] - [34].
- MSCam (Multispectral Camera) est une caméra chargée de prendre des images en couleur permettant d'étudier l'environnement du rover et les matériaux au sol. L'instrument fonctionne dans le spectre visible et en proche infrarouge dans 9 bandes spectrales dont les longueurs d'onde sont comprises entre 480 et 1 000 nm. La résolution est de 2 048 × 2 048 pixels[13].
- RoSPR (Rover-mounted Subsurface Penetrating Radar) est un radar chargé d'analyser la surface et le sous-sol de la planète le long de la trajectoire du rover. Il doit déterminer l'épaisseur et la structure de la glace d'eau souterraine, et fournir des informations sur la géologie de Mars, en croisant ses données avec celles recueillies par l'instrument Mars Subsurface Exploration Radar embarqué à bord de l'orbiteur. Ce radar dispose de deux canaux, un basse fréquence et un haute fréquence. Le premier utilise une fréquence centrale de 55 MHz et une largeur de bande comprise entre 35 MHz et 75 MHz. Il est capable de détecter la glace d'eau jusqu'à une profondeur de 100 mètres et d'étudier la structure du sol jusqu'à une profondeur de 10 mètres, avec une résolution de 1 mètre. Le second canal utilise une fréquence centrale de 1,3 GHz et une largeur de bande comprise entre 0,8 GHz et 1,8 GHz. Il est capable d'étudier la glace d'eau jusqu'à 10 mètres de profondeur et le sol jusqu'à 3 mètres, avec une résolution de l'ordre du centimètre. L'instrument a une masse de 5,8 kg et consomme 20 W de puissance électrique[13] - [35].
- MarSCoDe (Mars Surface Composition Detection Package) est un instrument utilisant la technique d'analyse spectroscopique induite par ablation laser ou LIBS : un laser pulsé tire sur la roche à analyser provoquant la fusion de sa couche superficielle et générant un plasma. La lumière de désexcitation émise dans l'infrarouge est collectée puis étudiée par un spectromètre afin d'en déduire la composition. L'instrument est capable de détecter plus d'une dizaine d'éléments chimiques (Si, Al, Fe, Mg, Ca, Na, O, C, H, Mn, Ti, S etc), et fonctionne de façon optimale à une distance d'entre 2 et 5 mètres, mais est capable d'aller jusqu'à 10 mètres. Il est composé de 5 modules : le laser proprement dit, deux spectromètres à infrarouge, une caméra capable d'obtenir des images d'une résolution de 0,3 mm par pixel de la cible étudiée, un miroir orientable afin de pointer avec précision le laser, et une cible d’étalonnage composée de 12 disques cylindriques. Le premier spectromètre infrarouge fonctionne dans une gamme de longueur d'onde comprise entre 240 et 850 nm pour en déduire le spectre d'émission du plasma. Le second fonctionne entre 850 et 2 400 nm et permet d'obtenir le spectre de réflectance. Tous deux ont une résolution spectrale inférieure à 12 nm[13] - [36]. L'Institut de Recherche en Astrophysique et Planétologie via le CNES, l'agence spatiale française, a contribué à la conception de l'instrument en fournissant notamment une cible d'étalonnage identique à celle utilisée sur ChemCam, un instrument similaire embarqué à bord du rover Curiosity de la NASA[37].
- RoMAG (Mars Rover Magnetometer) est un magnétomètre qui étudiera l'environnement magnétique du rover, et notamment la structure interne de Mars en analysant les variations naturelles du champ magnétique de la planète. Avec l'instrument Mars Magnetometer installé dans l'orbiteur, il étudiera les courants de l'ionosphère de Mars, ainsi que certaines de ses caractéristiques telles que la conductivité du sol. L'instrument a une plage de mesure de ± 2 000nT, avec une résolution supérieure à 0,01 nT[13].
- MCS (Mars Climate Station) est une station météorologique qui mesurera les caractéristiques de l'atmosphère de Mars à proximité de l'astromobile. L'instrument comporte un thermomètre capable de mesurer les températures comprises entre −120 °C et +50 °C avec une résolution de 0,1 °C, un manomètre pouvant mesurer la pression atmosphérique entre 1 et 1 500 Pa avec une résolution de 0,1 Pa, un anémomètre qui mesurera la vitesse du vent entre 0 et 70 m/s avec une résolution de 0,1 m/s ainsi que sa direction avec une résolution de 5°, et enfin un microphone pouvant enregistrer le son entre 20 Hz et 20 kHz[13].
Déroulement de la mission
.jpg.webp)
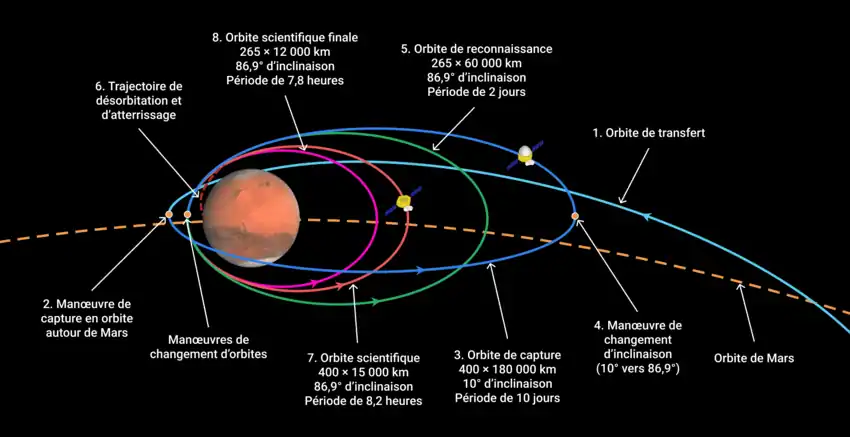
Tianwen 1 a été lancée le 23 juillet 2020, le premier jour de la fenêtre de transfert vers Mars s'étant ouverte à la mi-juillet et s'étant refermée en début par une fusée Longue Marche 5, la plus puissante en service en Chine. La phase de transit a duré environ 7 mois, puis l'orbiteur a inséré la sonde en orbite autour de Mars le 10 février 2021. Après une phase de repérage du site visé d'environ 2 mois, le véhicule de rentrée se séparera et effectuera une rentrée atmosphérique. L'atterrisseur se séparera à son tour et atterrira à la surface, avant de déployer l'astromobile. L'orbiteur servira ensuite pendant 90 jours de relai de télécommunications, puis changera d'orbite afin de poursuivre ses investigations scientifiques.
Lancement (23 juillet 2020)

La sonde utilise le lanceur lourd Longue Marche 5 qui l'insère directement en orbite de transfert vers Mars. Ce dernier connaît un échec lors de son deuxième lancement en 2017 qui provoque une interruption des vols durant 2 ans, puis reprend du service en [38]. Les sondes martiennes ne peuvent décoller qu'une fois tous les 26 mois, lorsque la position de la Terre et de Mars sont favorables. La fenêtre de tir de Tianwen 1 s'est ouverte le et s'est refermée le , car avant et après cette période, le lanceur n'a plus une puissance suffisante pour permettre à la sonde d'atteindre Mars. Chaque jour, 3 opportunités de lancement d'une durée de 5 minutes chacune s'ouvrent.
Le à 04h41 UTC, soit le jour de l'ouverture de la fenêtre de lancement, la sonde décolle à bord du cinquième exemplaire du lanceur Longue Marche 5 depuis la base de lancement de Wenchang sur l'île d'Hainan. Les médias chinois n'ont pas annoncé l'heure exacte du décollage ni ne tiennent de direct, mais des avertissements invitant les avions et les bateaux à quitter les zones de retombées des composants du lanceur suggérèrent que le lancement aura bien lieu. La trajectoire de la mission amène le lanceur à survoler les Philippines et sa capitale Manille, les étages du lanceurs tombant dans l'océan. Le succès du vol est annoncé 36 minutes plus tard par l'Administration spatiale nationale chinoise (CNSA) puis par la Société de sciences et technologies aérospatiales de Chine (CASC). Trois navires de classe Yuanwang, à savoir les bâtiments 5, 6 et 7, assurent une part du suivi de la mission : 6 minutes après le décollage, Yuanwang 6 détecte puis transmet les données du lanceur et de sa charge utile, les deux autres navires prenant ensuite le relai pour un total de 30 minutes de suivi[39]. Le premier contact de télécommunication avec la sonde après sa séparation du lanceur est effectué par l'antenne de 15 mètres de diamètre de la station de contrôle à Kourou de l'ESTRACK en Guyane. La sonde rentre alors en phase de transit et atteint la planète Mars après un voyage de 7 mois le 10 [40] - [41].
Transit entre la Terre et Mars (23 juillet 2020 – 10 février 2021)
Après sa séparation avec son lanceur, la sonde spatiale a entamé une phase de croisière, d'une durée d'environ sept mois durant laquelle elle s'est rapprochée de Mars uniquement grâce à sa vitesse acquise. Plusieurs manœuvres de correction de trajectoire étaient prévues (en anglais : trajectory correction maneuver ou TCM) durant le transit. Elles devaient permettre de corriger l'imprécision de l'injection par le lanceur, les perturbations gravitationnelles, ou encore les erreurs de détection et d'exécution du système.
La première manœuvre de correction de trajectoire est réalisée avec succès le à 23h00 UTC lorsque le moteur principal de l'orbiteur est mis à feu durant 20 secondes. La sonde est alors dans l'espace depuis 230 heures et à 3 millions de kilomètres de distance de la Terre[42]. La deuxième manœuvre a lieu le à 15h00 UTC, l'orbiteur allumant 4 de ses propulseurs de 120 newtons durant 20 secondes, testant à la même occasion leur bon fonctionnement. La sonde est alors dans l'espace depuis 60 jours et se trouve à 19 millions de kilomètres de la Terre[43]. Le , à l'occasion de la fête nationale chinoise, la CNSA dévoile deux selfies pris par la sonde en transit vers Mars à l'aide d'un petit module largué par l'orbiteur. D'une masse de 950 grammes, il comprend deux caméras grand champ de résolution 800 × 600 et 1 600 × 1 200 capturant chacune une image par seconde. Ces dernières sont placées dos à dos afin de maximiser les chances d'obtenir des photos satisfaisantes de la sonde, car le module n'utilise aucun système de contrôle d'attitude pour cadrer sa cible. Disposant d'une batterie d'une heure, il transmet ses photos à l'orbiteur via un système Wi-Fi d'une portée maximale de 400 mètres[44] - [45]. Une manœuvre de correction de trajectoire de grande ampleur appelée "manœuvre dans l'espace lointain" (en anglais : deep-space maneuver) a eu lieu avec succès le à 15h00 UTC lorsque le moteur principal de l'orbiteur a été mis à feu durant 480 secondes. La sonde se trouvait alors à 29,4 millions de kilomètres de la Terre et avait parcouru 210 millions de kilomètres depuis son décollage[46] - [47]. Une troisième manœuvre de correction de trajectoire a eu lieu le à 14h00 UTC lorsque l'orbiteur a allumé simultanément 8 de ses propulseurs de 25 newtons, testant à la même occasion leur bon fonctionnement. La sonde était alors dans l'espace depuis 97 jours et se trouvait à 44 millions de kilomètres de distance de la Terre. Elle avait parcouru 256 millions de kilomètres depuis son décollage, et la CNSA a annoncé que tous les systèmes de la sonde fonctionnaient normalement[48]. La quatrième manœuvre de correction de trajectoire a été accomplie le à 12h00 UTC, la sonde se trouvant à 184 millions de kilomètres de la Terre et à seulement 1,1 million de kilomètres de Mars. Il s'était alors écoulé 197 jours depuis son décollage, et elle avait parcouru 465 millions de kilomètres. La CNSA a publié à la même occasion la première photo de Mars obtenue par la sonde, prise à 2,2 millions de kilomètres de la planète[49].
Phase de reconnaissance (10 février 2021 – mai/juin 2021)
Alors que la sonde spatiale était au plus proche de la planète, le à 11h52 UTC le moteur principal de l'orbiteur d'une poussée de 3 000 newtons a été mis à feu durant 15 minutes afin de ralentir la sonde et de la placer dans une orbite martienne très elliptique de 400 × 180 000 kilomètres avec une inclinaison d'environ 10° qu'elle parcourt en 10 jours[50]. Le à l'occasion du Nouvel An lunaire la CNSA publie deux vidéos filmées par des caméras de surveillance à bord de l'orbiteur durant l'insertion en orbite martienne. La sonde survolant Mars, plusieurs caractéristiques topographiques (volcans...) ainsi que la fine atmosphère de la planète sont visibles, de même que les panneaux solaires et l'antenne grand gain de l'orbiteur qui oscillent lors de l'allumage du moteur principal[51] - [52]. Une fois à l'apoapside 5 jours après l'insertion en orbite martienne, la sonde réalise le à environ 9h00 UTC une nouvelle manœuvre pour se placer dans une orbite polaire, modifiant l'inclinaison orbitale de 10° à 86,9°. C'est une nouvelle fois le moteur principal de l'orbiteur qui est chargée de la manœuvre tandis que le périapside est en même temps abaissé de 265 km à 86,9°[53]. Désormais dans son orbite de reconnaissance la sonde commence le ses observations scientifiques en mettant en service un à un ses instruments. La CNSA publie le trois photos de Mars prises par les caméras à bord de l'orbiteur. L'une prise par MoRIC est en couleur et montre le pôle Nord de la planète, les deux autres ont été prises à une altitude comprise entre 330 et 350 kilomètres par HiRIC en mode panchromatique. Ces dernières atteignent une résolution de 0,7 mètre, on y distingue des cratères, des crêtes et des dunes de sable[54].
Atterrissage (15 mai 2021)
Afin d'atterrir sur Mars la sonde doit décélérer d'un total de 4,8 km/s. La précision de l'atterrissage limite l'incertitude à une ellipse de 100 kilomètres de long pour 20 kilomètres de large. Cette phase se décompose en quatre étapes :
- la rentrée atmosphérique qui commence à environ 125 kilomètres d'altitude,
- la descente sous parachute lorsque la vitesse a chuté sous Mach 2,
- le freinage final par rétropropulsion à partir de 1,5 kilomètre d'altitude à l'aide du moteur principal de l'atterrisseur,
- l'amortissement du choc avec le sol par les pieds de l'atterrisseur.
Comme l'illustre le tableau, ci-dessous, c'est la rentrée atmosphérique et le bouclier thermique qui freinent le plus l'atterrisseur au cours de sa descente.
| Phase \ Vitesse (Unité) | Vitesse initiale (m/s) | Vitesse finale (m/s) | Δv (%) |
|---|---|---|---|
| Rentrée atmosphérique | 4 800 | 460 | 90,4 |
| Descente sous parachute | 460 | 95 | 7,6 |
| Freinage final par rétropropulsion | 95 | 3,6 | 1,9 |
Δv (%) par rapport à la vitesse orbitale initiale de 4,8 km/s.
Rentrée atmosphérique
L'orbiteur met à feu son moteur principal afin de placer la capsule contenant l'atterrisseur et l'astromobile dans sa trajectoire de rentrée. La séparation a lieu 5 heures avant l'atterrissage, lorsque la sonde se trouve non loin du périapside. L'orbiteur manœuvre ensuite pour se placer dans une orbite de 265 × 15 000 kilomètres qu'il parcourt en 8,2 heures. Il sert alors de relai de télécommunication pour l'astromobile tout en poursuivant ses observations scientifiques. La rentrée atmosphérique de la capsule se fait selon une trajectoire balistique, c'est-à-dire qu'elle n'est pas pilotée. Elle commence à environ 125 km d'altitude, la trajectoire suivant un angle de 11,2° (avec une tolérance de ± 0,2°) par rapport à la surface de Mars et durera 300 secondes. Durant la rentrée atmosphérique la vitesse diminue de 4,8 km/s à 460 m/s et chute de 90,4 % par rapport à la vitesse orbitale initiale[16] - [14] - [20].
Descente sous parachute
Le parachute d'un diamètre de 15,96 m est déployé une fois que la vitesse de la sonde sera inférieure à 460 m/s soit Mach 2. La sonde est alors à 10 km d'altitude au-dessus de la surface de Mars. L'éjection du parachute crée un choc proche de la fréquence fondamentale de la sonde, il s'agit du choc le plus violent subi durant la mission. Cette phase de la descente dure 90 secondes, la vitesse de l'atterrisseur diminuant de 460 m/s à 95 m/s, le parachute permettant de réduire la vitesse de 7,6 % par rapport à la vitesse orbitale initiale. Durant cette phase de la descente le bouclier thermique avant est éjecté, permettant à un télémètre laser d'évaluer la distance avec le sol et à un capteur à micro-onde de calculer la vitesse[16] - [14] - [20].
Freinage final par rétropropulsion
Lorsque la vitesse n'est plus que de 95 m/s et l'altitude de 1,5 km, l'atterrisseur se sépare du bouclier arrière et du parachute puis met à feu son moteur principal à poussée variable. Cette phase de la descente dure 90 secondes et ralentit la capsule de 95 m/s à 3,6 m/s, soit 1,9 % de la vitesse initiale de la sonde à sa rentrée dans l'atmosphère. L'atterrisseur stationne brièvement lors de sa descente à 100 m d'altitude au-dessus du sol afin d'analyser le terrain. Pour ce faire, il emploie un capteur laser chargé d'imager le sol en trois dimensions, ainsi qu'une caméra qui compare les images prises avec sa base de données pour éviter les obstacles et repérer un site d'atterrissage dégagé[16] - [20].
Atterrissage
L'impact final avec le sol est amorti à l'aide des 4 pieds de l'atterrisseur, ces derniers peuvent supporter une vitesse verticale de 3,6 m/s et horizontale de 0,9 m/s. L'atterrisseur se pose finalement avec succès dans la région d'Utopia Planitia, le à 1h18 UTC, l'information prend 17 minutes à arriver sur Terre en raison des 320 millions de kilomètres la séparant de Mars au moment de l'atterrissage.
Déploiement et débarquement du rover (22 mai 2021)
Le rover déploie ensuite automatiquement son mât sur lequel sont installés les caméras de navigation, puis ses panneaux solaires et son antenne grand gain[55] - [56]. Durant 3 jours martiens ou sols[Note 1], le rover oriente son antenne grand gain de sorte à établir le lien de télécommunication afin de communiquer son statut. L'atterrisseur déploie deux rails qui servent de rampe au rover pour qu'il descende jusqu'à la surface.
Le 19 mai 2021, l'administration spatiale nationale chinoise (CNSA) publie pour la première fois des images montrant le sol martien et la préparation de la descente finale du rover Zhurong de l'atterrisseur vers le sol. Zhurong est encore perché sur la plate-forme de l'atterrisseur. Les photographies montrent les deux rampes de descente déjà mises en place et les panneaux solaires du rover déjà déployés[57] - [58] - [59].
Le 22 mai 2021, le rover Zhurong emprunte les rampes de descente de la plate-forme d'atterrissage pour rejoindre la surface de Mars et commencer son périple sur le sol de la planète rouge. Les premières images renvoyées vers la Terre montrent l'atterrisseur seul sans le rover[1] - [2].
Après 9 sols[Note 1], le rover s'éloigne du site d'atterrissage, 15 sont nécessaires pour compléter le téléchargement initial des données[20].
Déroulement futur de la mission
Phase d'opération (15 mai 2021 -)
La mission primaire du rover à la surface de Mars doit durer 3 mois, durée pendant laquelle l'orbiteur lui sert de relais de télécommunications depuis son orbite de parking. L'orbiteur Mars Express de l'Agence spatiale européenne est également mis à contribution en tant que relais de soutien des données du rover[60]. L'astromobile est équipée de 6 instruments scientifiques afin d'étudier son environnement dont une station météorologique, un radar qui sonde les couches souterraines de la surface, une caméra multispectrale ou encore un spectromètre laser. L'orbiteur est alors dans une orbite de 265 × 15 000 kilomètres avec une inclinaison de 86,9° et une périodicité de 8,2 heures. Après la phase d'opération primaire de 3 mois du rover, l'orbiteur modifie une dernière fois son orbite pour en abaisser l'apoapside à 12 000 km, ce qui diminue la période orbitale à 7,8 heures, afin de conduire des analyses plus poussées de la planète tout en maintenant son rôle de relai des données de l'astromobile. Il conduit tout au long de sa mission des relevés scientifiques à l'aide de 7 instruments, dont un magnétomètre, un spectromètre, un radar sondant la surface ou encore une caméra haute résolution aux capacités similaires à celle embarquée sur la sonde Mars Reconnaissance Orbiter de la NASA[16] - [14] - [20] - [15].
Segment sol

Plusieurs stations au sol sont utilisées pour communiquer avec la mission. On trouve notamment une antenne parabolique de 50 mètres de diamètre à Pékin, quatre de 35 mètres à Kashi, une de 25 mètres à Ürümqi, une de 66 mètres à Jiamusi, une de 40 mètres à Kunming et deux antennes de 25 et 65 mètres à Shanghai[16]. Une autre de 70 mètres de diamètre a été installée le à Tianjin[61]. L'Agence spatiale européenne apporte sa contribution durant les premières phases du lancement via son réseau de stations de contrôle ESTRACK, puis via ses antennes présentes à Cebreros (Espagne) et à New Norcia (Australie), qui permettront de localiser et de calculer avec précision la trajectoire de la sonde durant son trajet entre la Terre et Mars[60]. Une station de contrôle chinoise avec une antenne de 35 mètres de diamètre est également installée à Las Lajas en Argentine, en collaboration avec l'agence spatiale argentine CONAE[23] - [62] - [63].
Autour de la mission

Nom de la sonde
La sonde est connue au début de son développement en tant que « orbiteur global de télédétection et petit astromobile martien » (en anglais : Mars Global Remote Sensing Orbiter and Small Rover). Comme pour les rovers Yutu et Yutu 2, une compétition nationale est mise en place pour nommer la mission et 35 912 noms différents sont proposés. Les finalistes retenus sont : Fenghuang (en chinois : 凤凰 ; en français : phénix) ; Tianwen (天问 ; question céleste) ; Huoxing (火星 ; Mars) ; Tenglong (腾龙 ; dragon élancé) ; Qilin (麒麟 ; Qilin) ; Zhuque (朱雀 ; oiseau vermillon) ; Zhuimeng (追梦 ; chasseur de rêve) et Fengxiang (凤翔 ; phénix ascendant). À l'été 2018, la mission prend le nom provisoire de Huoxing-1 (火星一号 ; Mars-1)[30]. Le nom définitif de la mission est finalement dévoilé le à l'occasion de la journée spatiale du pays, commémorant Dong Fang Hong 1, premier satellite de la Chine, lancé 50 ans plus tôt. Tianwen (天问) signifiant "questions célestes" ou "questions au ciel", est le nom d'un antique poème de Qu Yuan dans lequel il soulève plusieurs questions sur le ciel, les phénomènes naturels et les mythes[64] - [65].
Nom du rover
La CNSA annonce le , soit le lendemain du décollage, le lancement d'une campagne pour baptiser le rover. La sélection se fera en quatre étapes : proposition du public via l'application Baidu ou le canal officiel, 10 noms semi-finalistes sélectionnés par un jury, puis un vote du public pour déterminer les 3 finalistes, et enfin la sélection du nom que portera le rover. La phase des propositions doit s'achever le [66]. Le , les 10 noms sélectionnés par le jury parmi les plus de 1,4 million de propositions des internautes sont dévoilés. Les semi-finalistes retenus sont : Hongyi (en chinois : 弘毅 ; en français : persévérance) ; Qilin (麒麟 ; Qilin) ; Nezha (哪吒 ; Nezha) ; Chitu (赤兔 ; lièvre rouge) ; Zhurong (祝融 ; Zhurong) ; Qiusuo (求索 ; chercher) ; Fenghuolun (风火轮 ; roue de vent et de feu (en)) ; Zhuimeng (追梦 ; chasseur de rêve) ; Tianxing (天行 ; marcheur céleste) et Huoxing (火星 ; Mars). La phase de vote des internautes pour sélectionner les 3 noms finalistes est ouverte du au [67].
La CNSA annonce finalement le à l'occasion de la journée chinoise de l'espace que le rover s'appellera Zhurong (chinois : 祝融号 ; pinyin : Zhùróng Hào), du nom d'une divinité du feu de la mythologie chinoise. Le communiqué de la CNSA donne plusieurs raisons quant à ce choix, notamment le fait qu'il s'inscrit dans une tradition d'engins spatiaux nommés à partir de la culture traditionnelle chinoise, comme le programme Chang'e baptisé d'après la déesse de la Lune Chang'e[68].
Timbre commémoratif
Une cérémonie se tient le au Wenchang Space Science Center sur l'île d'Hainan afin de dévoiler un timbre commémoratif du lancement de la mission. Celui-ci représente la sonde et son voyage en direction de Mars, avec en fond la Terre et une galaxie. Il est prévu d'en émettre 7,8 millions pour un prix à l'unité de 1,2 yuan[69].
Suite du programme
Le directeur de l'Administration spatiale nationale chinoise Zhang Kejian annonce le que la mission inaugure le programme d'exploration Tianwen consacré aux planètes du Système solaire. Une deuxième sonde martienne en vue de ramener des échantillons de Mars d'ici 2030 est en développement. Il est initialement proposé que la mission décolle en un seul tir à bord d'un lanceur super lourd Longue Marche 9, mais une architecture en deux lancements, un orbiteur de 5 000 kg sur une Longue Marche 5 et un atterrisseur doté d'un étage de remontée de 2 500 kg sur une Longue Marche 3B, est également étudiée[30] - [64].
Notes et références
Notes
- Un jour solaire martien, dit « sol », dure 24 heures, 39 minutes et 35 secondes (l'équivalent de notre jour solaire de 24 heures) alors que le jour sidéral martien dure 24 heures, 37 minutes et 23 secondes (l'équivalent du jour sidéral terrestre de 23 heures 56 minutes et 4 secondes).
Référence
- (en) Ryan Woo et Yilei Sun, « China says Martian rover takes first drive on surface of Red Planet » [« La Chine annonce que le rover martien réalise ses premiers tours de roue à la surface de la planète rouge »], Reuters, (consulté le )
- (zh) « 祝融号火星车成功驶上火星表面-新华网 » [« Le rover Zhu Rong a navigué avec succès à la surface de Mars »], xinhuanet.com, (consulté le )
- Brian Harvey 2019, p. 479-480
- Brian Harvey 2019, p. 480-483
- Brian Harvey 2019, p. 483-484
- Brian Harvey 2019, p. 484-486
- (en) « SASTIND reveals more details of Mars mission », sur China Space Report, (consulté le )
- « 中国探空火箭成功实验火星探测器降落伞技术 », sur www.guancha.cn (consulté le )
- (en) Andrew Jones, « Here's where China is looking to land its 2020 Mars rover », The Planetary Society,
- (en-US) « China’s first Mars spacecraft undergoing integration for 2020 launch », sur SpaceNews, (consulté le )
- (en-US) Stephen Clark, « Chinese Mars rover completes landing trial ahead of 2020 launch – Spaceflight Now » (consulté le )
- (en) « China completes crucial landing test for first Mars mission in 2020 », Reuters, (lire en ligne, consulté le )
- (en) Jia Yingzhuo, Fan Yu, Zou Yongliao, « Scientific Objectives and Payloads of Chinese First Mars Exploration », (consulté le )
- (en) Ye Peijian, Sun Zezhou, Rao Wei, Meng Linzhi, « Mission overview and key technologies of the first Mars probe of China », (consulté le )
- (en) W. X. Wan, C. Wang, C. L. Li et Y. Wei, « China’s first mission to Mars », Nature Astronomy, vol. 4, no 7, , p. 721–721 (ISSN 2397-3366, DOI 10.1038/s41550-020-1148-6, lire en ligne, consulté le )
- (en) Xiuqiang Jiang, Bin Yang, Shuang Li, « Overview of China’s 2020 Mars mission design and navigation », (consulté le )
- (zh-CN) « 航天科技集团六院78台发动机千吨动力开启中国首次探火之旅 », sur guoqing.china.com.cn, (consulté le )
- (zh-CN) « 揭秘!天问一号探测器传回的地月合影是怎么拍出来的 », sur sh.people.com.cn, (consulté le )
- (zh-CN) « “太空多面手”火星环绕器是怎样炼成的 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 2020中国火星探测计划(根据叶院士报告整理) | 航天爱好者网 », sur spaceflightfans.cn, (consulté le )
- (zh-CN) « 探火新材料,表面“热浪滚滚”,里面“凉爽宜人” | 航天爱好者网 » (consulté le )
- (zh-CN) « 中国电科以技术创新为“天问一号”乘风破浪保驾护航 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) sina_mobile, « 箭在弦上的中国火星一号探测器,长征五号遥四火箭将再立新功 », sur k.sina.cn, (consulté le )
- (zh-CN) « Sina Visitor System », sur passport.weibo.com (consulté le )
- (zh-CN) « 天问一号四大不可不知的亮点 », sur tech.sina.com.cn, (consulté le )
- (zh-CN) « 焦点访谈:“天问一号”要成功奔向火星,还得闯多少关? », sur china.chinadaily.com.cn, (consulté le )
- (en) WeiXing Wan, Chi Wang, ChunLai Li et Yong Wei, « The payloads of planetary physics research onboard China’s First Mars Mission (Tianwen-1) »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), Earth and Planetary Physics, (ISSN 2096-3955, DOI 10.26464/epp2020052, consulté le ), p. 331–332
- (en) « Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission », Advances in Space Research, vol. 67, no 2, , p. 812–823 (ISSN 0273-1177, DOI 10.1016/j.asr.2020.11.005, lire en ligne, consulté le )
- (en) Wei Yan, Yan Su, Bin Liu, Junduo Li, Chunlai Li, « Working Modes and Exploration Program for Optical Cameras of China’s First Mars Mission », (consulté le )
- Brian Harvey 2019, p. 486
- (zh-CN) « 数个首次!飞向火星的“天问一号”有这几件“神器” | 航天爱好者网 » (consulté le )
- (en) « Tianwen-1 », sur www.iwf.oeaw.ac.at (consulté le )
- (zh-CN) « 510所火星能量粒子分析仪将在13个科学载荷中最先开机_手机搜狐网 », sur m.sohu.com (consulté le )
- (zh-CN) L. I. Chunlai, L. I. U. Jianjun, Geng Yan et C. a. O. Jinbin, « Scientific Objectives and Payload Configuration of China's First Mars Exploration Mission », 深空探测学报(中英文), vol. 5, no 5, , p. 406–413 (ISSN 2095-7777, DOI 10.15982/j.issn.2095-7777.2018.05.002, lire en ligne, consulté le )
- (en) B. Zhou, S. X. Shen, Y. C. Ji, W. Lu, F. Zhang, G. Y. Fang, Y. Su, S. Dai, « The subsurface penetrating radar on the rover of China's Mars 2020 mission », (consulté le )
- (en) X. Ren, T.N. Cai, D.W. Liu, J.J. Liu, H.B. Zhang, Q. Fu, Z.B. Zhang, W.M. Xu, « Preliminary Scientific Exploration Programs for Mars Surface Composition Detection Package of China's First Mars Exploration », (consulté le )
- Marie Ange Sanguy, « Sylvestre Maurice », Espace & Exploration, , p. 49 (ISSN 2114-1320)
- (en-US) Stephen Clark, « Successful Long March 5 launch paves way for new Chinese space missions – Spaceflight Now » (consulté le )
- (en) « Chinese space tracking ships complete monitoring of Mars probe launch - Xinhua | English.news.cn », sur www.xinhuanet.com (consulté le )
- (en-US) « Tianwen-1 launches for Mars, marking dawn of Chinese interplanetary exploration », sur SpaceNews, (consulté le )
- (en-US) Stephen Clark, « China launches robotic mission to orbit, land, and drive on Mars – Spaceflight Now » (consulté le )
- (en) « China's Mars probe completes first orbital correction - Xinhua | English.news.cn », sur www.xinhuanet.com, (consulté le )
- (en) « China's Mars probe completes second orbital correction - Xinhua | English.news.cn », sur www.xinhuanet.com, (consulté le )
- (zh-CN) « 【这个帅了】太空中的中国国旗!来自天问一号的自拍! | 航天爱好者网 », sur www.spaceflightfans.cn, (consulté le )
- (zh-CN) « 国家航天局发布天问一号探测器飞行图像 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 天问一号探测器完成深空机动 », sur www.cnsa.gov.cn, (consulté le )
- (en) « Mars probe makes deep-space maneuver - People's Daily Online », sur en.people.cn, (consulté le )
- (en) « China's Mars probe completes third orbital correction - Xinhua | English.news.cn », sur www.xinhuanet.com, (consulté le )
- (zh-CN) « 天问一号完成第四次轨道中途修正 传回首幅火星图像 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 天问一号探测器成功实施火星捕获 中国首次火星探测任务环绕火星获得成功 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 国家航天局发布天问一号探测器火星捕获过程影像1 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 国家航天局发布天问一号探测器火星捕获过程影像2 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 天问一号探测器完成远火点平面轨道调整 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 天问一号探测器拍摄高清火星影像 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 我国首次火星探测任务着陆火星取得圆满成功 », sur www.cnsa.gov.cn, (consulté le )
- (en) « China succeeds in first Mars landing - Xinhua | English.news.cn », sur www.xinhuanet.com, (consulté le )
- Joey Roulette, « China releases first images from its Zhurong rover on Mars », sur The Verge, (consulté le )
- Jonathan Amos, « China on Mars: Zhurong rover returns first pictures », sur BBC News, (consulté le )
- Pierre Barthélémy, « Le rover chinois Zhurong envoie ses premières photos de Mars », sur Le Monde.fr, (consulté le )
- (en) Leonard David 22 July 2020, « China's Tianwen-1 Mars rover mission gets a boost from international partners », sur Space.com (consulté le )
- (en-US) « Rocket arrives as China targets July for Tianwen-1 Mars mission launch », sur SpaceNews, (consulté le )
- (en-US) « Long March 5 rolled out for July 23 launch of China's Tianwen-1 Mars mission », sur SpaceNews, (consulté le )
- (zh-CN) haibaraemily, « 天问一号的火星之旅·4亿公里外的讯息传递 », sur baike.baidu.com, (consulté le )
- (en) « China reveals name, logo for its 'Tianwen' first Mars landing mission | collectSPACE », sur collectSPACE.com (consulté le )
- (en) « China launches global naming campaign for country's first Mars rover », sur www.ecns.cn (consulté le )
- (en) « China launches global naming campaign for Mars rover - Xinhua | English.news.cn », sur www.xinhuanet.com (consulté le )
- (zh-CN) « 中国第一辆火星车征名“十进三”投票将在百度App启动 », sur tech.china.com, (consulté le )
- (zh-CN) « 中国第一辆火星车命名为:祝融号 », sur www.cnsa.gov.cn, (consulté le )
- (en) « China issues commemorative stamps to mark first Mars probe Tianwen-1 - Global Times », sur www.globaltimes.cn (consulté le )
Bibliographie
- Programme spatial chinois en général
(en) Brian Harvey, China in space : the great leap forward, Springer Praxis, , 564 p. (ISBN 978-3-030-19587-8)
- Articles sur les instruments
- (en) GuoBin Yu, EnHai Liu, GuangLin Liu et Li Zhou, « Moderate Resolution Imaging Camera (MoRIC) of China’s First Mars Mission Tianwen-1 », Earth and Planetary Physics, vol. 4, no 4, , p. 364–370 (ISSN 2096-3955, DOI 10.26464/epp2020056, lire en ligne, consulté le )
- (en) Kai Liu, XinJun Hao, YiRen Li et TieLong Zhang, « Mars Orbiter magnetometer of China’s First Mars Mission Tianwen-1 », Earth and Planetary Physics, vol. 4, no 4, , p. 384–389 (ISSN 2096-3955, DOI 10.26464/epp2020058, lire en ligne, consulté le )
- (en) LingGao Kong, AiBing Zhang, Zhen Tian et XiangZhi Zheng, « Mars Ion and Neutral Particle Analyzer (MINPA) for Chinese Mars Exploration Mission (Tianwen-1): Design and ground calibration », Earth and Planetary Physics, vol. 4, no 4, , p. 333–344 (ISSN 2096-3955, DOI 10.26464/epp2020053, lire en ligne, consulté le )
- (en) ShuWen Tang, Yi Wang, HongYun Zhao et Fang Fang, « Calibration of Mars Energetic Particle Analyzer (MEPA) », Earth and Planetary Physics, vol. 4, no 4, , p. 355–363 (ISSN 2096-3955, DOI 10.26464/epp2020055, lire en ligne, consulté le )
- (en) Bin Zhou, ShaoXiang Shen, Wei Lu et YuXi Li, « The Mars rover subsurface penetrating radar onboard China's Mars 2020 mission », Earth and Planetary Physics, vol. 4, no 4, , p. 345–354 (ISSN 2096-3955, DOI 10.26464/epp2020054, lire en ligne, consulté le )
- (en) YongQing Peng, LeiBo Zhang, ZhiGuo Cai et ZhaoGang Wang, « Overview of the Mars climate station for Tianwen-1 mission », Earth and Planetary Physics, vol. 4, no 4, , p. 371–383 (ISSN 2096-3955, DOI 10.26464/epp2020057, lire en ligne, consulté le )
Annexes
Au sujet de Mars
Au sujet de l'exploration de Mars
- Exploration de Mars
- Yinghuo 1, première mission martienne de la Chine lancée en 2011
- Mars 2020, mission martienne de la NASA lancée en 2020
- Mission martienne des Émirats, mission martienne des EAU lancée en 2020
- Rover ExoMars mission martienne de l'ESA et Roscosmos prévue pour 2022
Au sujet du programme spatial de la Chine
- Programme spatial de la Chine
- Programme chinois d'exploration lunaire
- Chang'e 5, sonde lunaire de retour d'échantillons chinoise lancée en novembre 2020