Astromobile
Un (ou une) astromobile[1] - [2] ou rover[2] est un véhicule conçu pour explorer la surface d'un corps céleste ou d'une autre planète que la Terre. Au cours de ses déplacements, il mène des observations et des analyses de son environnement, souvent de façon quasi autonome et guidée depuis la Terre. Les astromobiles déployés sont généralement des robots télécommandés ou disposant d'une certaine autonomie.

Le seul exemple d'astromobile piloté par un équipage humain embarqué est le rover lunaire Apollo (Lunar Roving Vehicle) de la NASA, fonctionnant sur batteries et utilisé à trois reprises sur la Lune en 1971-1972 dans le cadre du programme Apollo pour transporter deux astronautes sur une trentaine de kilomètres.
Caractéristiques générales
L'astromobile se distingue de l'atterrisseur par sa mobilité qui lui permet d'étudier une région plus étendue que celle du site d'atterrissage. Il peut être ainsi dirigé vers une zone intéressante aux reliefs contrastés qui ne permet pas d'atterrir en sécurité comme un cratère, un affleurement ou des rochers. Au-delà des obstacles rencontrés sur le terrain, la mobilité de l'astromobile est toutefois limitée par les conditions climatiques et d'ensoleillement. Il est souvent équipé de panneaux solaires qui lui fournissent l'énergie nécessaire à ses déplacements.
Contrairement à un orbiteur qui effectue des observations et des mesures depuis une orbite, l'astromobile peut analyser directement les matériaux et roches en surface. Il peut être équipé d'instruments scientifiques variés (spectromètre, foreuse, four, capteurs, caméras) qui permettent d'apporter des informations plus précises sur la composition des matériaux. La contrepartie est que la zone de prospection de l'astromobile se limite à une région proche du site d'atterrissage. Dans le cas de la planète Mars la distance qui sépare l'astromobile de la Terre ne permet pas de communiquer en temps réel : le temps de transmission du signal aller-retour peut atteindre une quarantaine de minutes suivant la position respective de Mars et de la Terre. L'astromobile doit donc être conçu pour fonctionner de manière autonome.
Astromobiles lunaires
Lunokhod 1 (1970)
Durant les années 1960, les Soviétiques développent dans le secret un astromobile lunaire nommée Lunokhod 1A, avec l'ambition d'en faire le premier robot commandé sur la Lune. Il est radiocommandé depuis la Terre par un personnel spécialement entraîné au temps différé entre les ordres, l'action et le retour visuel. Il est lancé le mais l'explosion d'un propulseur d'appoint au décollage conduit à l'échec de la mission.
Une nouvelle tentative est effectuée en novembre 1970 avec la mission Luna 17 transportant l'astromobile Lunokhod 1. Un lanceur Proton est lancé avec succès depuis Baïkonour le 10 novembre et atteint l'orbite lunaire cinq jours plus tard[3]. Après deux jours en orbite l'astromobile atterrit sur la mer lunaire Mare Imbrium (la mer des Pluies) et envoie le premier signal le 17 novembre. C'est le premier astromobile guidé depuis la Terre sur un corps céleste. Lunokhod 1 est un véhicule à huit roues composé d'un caisson principal à large couvercle, d'antennes, de caméras vidéos et d'instruments pour analyser le sol lunaire. L'alimentation électrique est fournie par des panneaux solaires et l'astromobile est conçu pour fonctionner durant trois jours lunaires[4].
Du 17 au 22 novembre 1970 l'astromobile parcourt 197 m et au cours de 10 séances de communication transmet 14 images rapprochées de la Lune et 12 vues panoramiques. Il a analysé la surface lunaire durant 10 mois en effectuant plusieurs centaines de tests. Le dernier contact avec Lunokhod 1 est obtenu le [3].
Lunokhod 2 (1973)

Le 8 janvier 1973, la sonde Luna 21 transportant l'astromobile nommé Lunokhod 2 est lancée avec succès en direction de la Lune. Les caractéristiques de cet astromobile sont similaires à celles de Lunokhod 1. Une masse de 840 kg, 1,7 m de long pour 1,6 m de large et monté sur 8 roues, mais est équipée d'un appareil photographique de qualité pour obtenir des vues panoramiques et une meilleure représentation de la topographie lunaire.
L'alimentation électrique est fournie par des panneaux solaires et une source de chaleur radioactive fonctionnant au polonium 210 permet de limiter la chute de température de l'astromobile qui a lieu durant la nuit[5]. La sonde se place sur orbite lunaire le 12 et réussit son atterrissage le sur la bordure orientale de la région de la mer de la Sérénité (Mare Serenitatis). C'est le deuxième astromobile contrôlé depuis la Terre à se poser sur un corps céleste.
Lunokhod 2 reste opérationnel pendant environ 4 mois à analyser le sol lunaire parcourant au total plus de 42 km[6] sur divers reliefs comme de petites collines et renvoie vers la Terre 86 images panoramiques ainsi que plus de 80 000 images de qualité. Lunokhod 2 détenait le record de la plus grande distance parcourue par un astromobile sur un corps céleste, avant d'être battu par le rover Opportunity en 2018 sur la planète Mars.
Yutu 1 (2013-2014)
Lancé le , le vaisseau Chang'e 3 (troisième sonde lunaire chinoise) se pose sur la Lune le 14 décembre. Il s'agit du premier engin à évoluer sur notre satellite depuis 37 ans[7]. Quelques heures plus tard, l'astromobile Yutu (en chinois : 玉兔 ; pinyin : yù tù ; littéralement : « lapin de jade », en référence au lapin lunaire) est déposé à la surface. Sa masse est de 140 kg (dont 20 kg de charge utile), sa hauteur de 1,5 mètre, il se déplace sur 6 roues et est surmonté d'un mât portant des caméras ainsi que d'une antenne parabolique servant aux communications vers la Terre. Un bras articulé sert par ailleurs de support à l'un des instruments scientifiques. Son énergie lui étant fournie par des panneaux solaires, il est conçu pour se mettre en veille durant la nuit lunaire (longue de 15 jours terrestres) lorsque la température tombe à −180 °C, survivant alors grâce à l'énergie stockée dans ses batteries et des unités de chauffage à base d'isotopes radioactifs de plutonium 238.
Prévue pour s'échelonner sur trois mois (trois jours et trois nuits lunaires), sa mission ne durera que deux jours lunaires : le 25 janvier 2014, à la suite d'un dysfonctionnement non expliqué, les déplacements cessent. Au total, Yutu a parcouru 114 mètres[8].
Yutu 2 (2019)
Chang'e 4 est la quatrième sonde spatiale chinoise de l'agence spatiale chinoise CNSA, dont le lancement a lieu le 7 décembre 2018. Elle se pose sur la face cachée de la Lune le 3 janvier 2019 et, peu après, débarque Yutu 2, un astromobile dont les caractéristiques sont très proches de celles de Yutu 1.
Le 13 février, alors que le rover amorce sa deuxième nuit lunaire, il a parcouru 120 m[9].
Chandrayaan-2 (2019)
Chandrayaan-2 est la deuxième sonde spatiale indienne développée par l'agence spatiale indienne ISRO. L'engin spatial comprend un orbiteur, un atterrisseur qui doit se poser sur la Lune et un astromobile de 20 kilogrammes.L'orbiteur se place en orbite le et commence le recueil des données quelques jours plus tard. L'atterrisseur tente de se poser en douceur sur la surface de la Lune le 6 septembre, mais tout contact est perdu alors que l'engin spatial se trouve encore à quelques centaines de mètres de la surface. L'atterrisseur et l'astromobile sont considérés comme perdus[10].
VIPER (2023)
VIPER est un astromobile développé par l'agence spatiale américaine, la NASA, dans le but d'étudier la glace d'eau présente dans le régolithe du fond des cratères situés au pôle sud de la Lune. L'eau pourrait jouer un rôle important pour les séjours à la surface de la Lune d'équipage d'astronautes en fournissant les consommables nécessaires - oxygène, eau consommable et ergols - grâce aux technologies d'utilisation des ressources in situ. L'engin spatial, qui doit être lancé fin 2023, fait partie des missions développées dans le cadre du Programme Artemis dont l'objectif est de déposer un équipage à la surface de la Lune en 2024. L'astromobile est développé par le centre de recherche Ames de la NASA et doit être déposé sur le sol lunaire par un atterrisseur développé par la société Astrobiotics Technology[11]
Astromobiles sur Mars
Prop-M (1971, échecs)
La mission soviétique Mars 2 est constituée d'un orbiteur et d'un atterrisseur qui est associé à une petite astromobile nommée Prop-M. Lancée avec succès le , l'atterrisseur effectue sa descente vers la surface martienne le 27 novembre 1971 mais s'écrase à la surface.
La mission soviétique Mars 3, jumelle de Mars 2, est constituée d'un orbiteur et d'un atterrisseur qui est associé à une petite astromobile nommée Prop-M. Lancée avec succès le , l'atterrisseur effectue sa descente vers la surface martienne le 2 décembre de la même année[12]. Après l'atterrissage, il transmet un signal durant une vingtaine de secondes puis le signal est définitivement perdu. La raison de ce silence radio reste inexpliquée. L'atterrisseur devait ensuite placer le petit astromobile sur la surface martienne à l'aide d'un bras manipulateur. Prop-M est un véhicule de seulement 4,5 kg relié à l'atterrisseur par un câble et monté sur une paire de « ski ». Il est conçu pour parcourir environ 15 m en effectuant des mesures du sol tous les 1,5 m, les traces laissées par le déplacement de l'astromobile sur le sol devaient être photographiées pour être analysées[13].
 Vue d'artiste du rover Prop-M.
Vue d'artiste du rover Prop-M..jpg.webp) Maquette à l'échelle de l'atterrisseur Mars 3 Lander au Musée mémorial de l'astronautique à Moscou. PrOP-M est visible en haut.
Maquette à l'échelle de l'atterrisseur Mars 3 Lander au Musée mémorial de l'astronautique à Moscou. PrOP-M est visible en haut.
Sojourner (1997)

La mission américaine Mars Pathfinder est composée d'un atterrisseur fonctionnant en station d'étude fixe et d'un astromobile nommée Sojourner. La sonde est lancée le 4 décembre 1996 et l'atterrisseur atteint la surface martienne le 4 juillet 1997 dans la vallée Ares Vallis. Guidé par un opérateur sur Terre, l'astromobile quitte deux jours martiens plus tard l'atterrisseur et est opérationnel sur la surface. Il devient alors le premier astromobile à s'être déplacé sur une autre planète. Sojourner est un petit véhicule de 65 cm de long et de 10,5 kg. Il forme un petit caisson de forme rectangulaire supporté par six roues montées sur suspensions et est recouvert d'un panneau solaire sur le dessus de 0,2 m2 qui lui fournit l'énergie suffisante pour se déplacer plusieurs heures par jour. Le coût de cet astromobile est estimé à environ 25 millions de dollars américains[14]. L'astromobile a cessé toute communication le pour une raison inconnue mais a transmis durant son activité 550 images et contribué à de nombreuses analyses de roches et observations du site d'atterrissage.
Spirit (2004-2010) et Opportunity (2004-2018)

La NASA lance le 10 juin et le 7 juillet 2003, deux astromobiles « géologues » nommées Spirit et Opportunity dans le cadre de la mission Mars Exploration Rover. Ils atterrissent toutes les deux avec succès en janvier 2004 sur deux régions opposées de la planète Mars, le cratère Goussev et la plaine Meridiani Planum. Les deux astromobiles sont conçus de la même façon avec une masse d'environ 185 kg et équipées de six roues motorisées qui sont alimentées par des batteries lithium-ion restituant l'énergie fournie par leurs panneaux solaires de 1,3 m2.
L'équipement est composé d'un ensemble d'outils qui permet d'effectuer de la détection à distance (photographie, spectromètre thermique) ou des mesures in-situ (abrasion, spectromètre X et Mössbauer). Des séquences de commandes sont envoyées de la Terre pour guider les astromobiles à partir des images et résultats reçus régulièrement de Mars. À l'origine conçus pour une mission d'étude de 90 jours martiens, les deux robots ont dépassé largement ce cap.
Spirit a envoyé son dernier signal le plusieurs mois après s'être enlisé dans le sable et après avoir parcouru 7,7 km. Opportunity, quant à lui, est resté en activité pendant près de quinze ans, évoluant à proximité du cratère Endeavour mais succombant à une tempête de sable sévissant sur l'ensemble de la planète. Le , il a parcouru 45,16 km[15].
Curiosity (depuis 2012)

La NASA lance le un astromobile « géologue » nommé Curiosity dans le cadre de la mission Mars Science Laboratory. Celui-ci atterrit avec succès dans le cratère Gale le pour une mission de 22 mois terrestres, dont l'objectif est de déterminer si un environnement habitable, c'est-à-dire favorable au maintien d'une éventuelle vie de type terrestre, a existé sur Mars. Le 13 novembre 2016, elle a parcouru 14,98 km[16].
Tianwen-1 (2021)
Tianwen-1 est une mission spatiale martienne chinoise lancée le par le lanceur chinois Longue Marche 5 et arrivée le 15 mai 2021 sur le sol de Mars. La mission comprend un orbiteur et un astromobile qui doit se poser sur la surface de la planète Mars. La durée de la mission primaire de l'astromobile est de trois mois[17] - [18].
Perseverance (2021)
La sonde spatiale Perseverance est une mission développée par le centre JPL de la NASA dont le lancement a eu lieu le [19] - [20]. Le rover se pose sans encombre le 18 février 2021 dans le cratère Jezero[21].
Hormis son instrumentation scientifique, l'engin spatial est une copie de la sonde spatiale Mars Science Laboratory qui s'est posée avec succès sur Mars en août 2012. L'un des principaux objectifs assignés à cette nouvelle mission est la collecte d'échantillons du sol martien qui devraient être retournés sur Terre par une mission de retour d'échantillons.
ExoMars (2023)
Dans le cadre du programme ExoMars de l'Agence spatiale européenne, un astromobile doit être lancé vers Août/octobre 2022.
Synthèse des caractéristiques des astromobiles développés
| Désignation | Pays/Agence spatiale | Date | Durée fonctionnement | Dimension Long. x Larg x Haut. |
Masse totale | Masse instruments | Distance parcourue | Énergie et source | Principaux instruments | Autres caractéristiques | Commentaire |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Exploration de la Lune | |||||||||||
| Lunokhod 1 | 1970-1971 | 11 mois | 2,22 x 2,15 x 1,35 m | 756–836 kg | ? kg | 10,54 km | Cellules solaires : 180 watts | pente max : 40 % | |||
| Lunokhod 2 | 1973 | 5 mois | 2,22 x 2,15 x 1,35 m | 756–836 kg | ? kg | 42,1 km | Cellules solaires : 180 watts | pente max : 40 % | |||
| Yutu | 2013-2014 | 42 jours | ? | 120 kg | 20 kg | 114,8 m | Cellules solaires : 180 watts | pente max : 20 % | |||
| Yutu 2 | 2019 | mission en cours | ? | 120 kg ? | 120 m | Cellules solaires : ? watts | |||||
| Chandrayaan-2 | 2019 | 20 kg | ? kg | 0 km | Cellules solaires | ||||||
| VIPER | 2023 | 100 jours | 400 kg | ? kg | Cellules solaires | Fait partie du programme Artemis | |||||
| Exploration de Mars | |||||||||||
| Sojourner | 1997 | 7 jours | 0,48 x 0,30 x ? m | 11,5 kg | ? kg | 100 m | Cellules solaires : 13 watts | ||||
| Spirit | 2004-2009 | > 6 ans | 1,6 x 2,3 x 1,5 m | 185 kg | ? kg | 7,73 km | Cellules solaires : 140 watts | pente max : 30 % | |||
| Opportunity | 2004-2018 | > 15 ans | 1,6 x 2,3 x 1,5 m | 185 kg | ? kg | 45,16 km | Cellules solaires : 140 watts | pente max : 30 % | |||
| Curiosity | 2012- | mission en cours | 2,9 x 2,7 x 2,2 m | 899 kg | 75 kg | 20,26 km en 2019 | RTG : 110 watts | 2 laboratoires d'analyse chimique Foreuse | pente max : 50 % | ||
| Tianwen-1 | 2021- | 90 jours | 2,0 x 1,65 x 0,8 m | 240 kg | ? kg | 0 km | ? watts | ||||
| Perseverance | 2021- | > 24 mois | 2,9 x 2,7 x 2,2 m | ~900 kg | ~75 kg | 13,45 km | RTG : 110 watts | pente max : 50 % | |||
| Rover ExoMars | 2023- | 218 Sols (jours martiens) | 2,5 x ? x 2 m | 310 kg | 26 kg | 0 km | Cellules solaires : ? watts | ||||
Les astromobiles lunaires pilotés du programme Apollo (1971-1972)
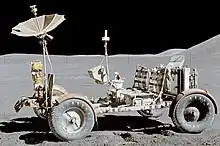
Au début des années 1970, la NASA développe un véhicule nommé Lunar Roving Vehicle dans le cadre du programme Apollo, de manière à faciliter l'exploration des astronautes à la surface de la Lune. C'est un véhicule à quatre roues, de trois mètres de long, d'une masse d'environ 200 kg à vide et alimenté par batterie électrique. Le châssis fabriqué en alliage d'aluminium est conçu en trois parties reliées au centre de l'astromobile de façon à pouvoir être plié dans une partie de la soute du module lunaire.
Conçu pour transporter deux astronautes et du matériel, trois exemplaires ont été utilisés lors des derniers vols Apollo. Le premier d'entre eux est piloté par les astronautes David Scott et James Irwin, du 31 juillet au , lors de la mission Apollo 15. Les deux hommes parcourent plus de 27 km au pied du Mont Hadley. Deux autres rovers ont été utilisés en avril et décembre 1972, lors des missions Apollo 16 (John Young et Charles Duke) et Apollo 17 (Eugene Cernan et Harrison Schmitt), les astronautes séjournant également trois jours sur la Lune et y parcourant respectivement 26,7 km et 35,9 km.
Compte tenu des distances parcourues, les découvertes réalisées lors de ces trois missions n'auraient pas été possibles sans ces véhicules[22].
Études en cours et projets abandonnés
Plusieurs véhicules d'exploration lunaire ou martienne ont été créés. Aucun n'a abouti pour l'instant. La NASA développe en ce moment un astromobile d'exploration lunaire pouvant contenir plus de quatre personnes. Toyota et la JAXA, l'agence spatiale japonaise, travaillent en ce moment sur un véhicule lunaire.
Notes et références
- Commission d’enrichissement de la langue française, « astromobile », sur FranceTerme, ministère de la Culture.
- Arrêté du 20 février 1995 relatif à la terminologie des sciences et techniques spatiales.
- (en) Robert Christy, « The Mission of Luna 17 », sur zarya (consulté le ).
- (en) Artem Ivankov, « Luna 17/Lunokhod 1 », sur NASA -NSSDC (consulté le ).
- (en) Artem Ivankov, « Luna 21/Lunokhod 2 », sur NASA -NSSDC (consulté le ).
- Le chiffre de 37 km, avancé pendant 40 ans, a été révisé à la hausse en juin 2013 : d'après des images prises depuis orbite, Lunokhod 2 aurait en effet parcouru entre 42,1 km et 42,2 km. http://www.nature.com/news/space-rovers-in-record-race-1.13229 [archive] Représentation du parcours : http://fr.rian.ru/infographie/20100322/186299882.html
- Le précédent engin était la sonde soviétique Luna 24, en août 1976.
- Sky & Telescope, http://www.skyandtelescope.com/astronomy-news/change-3-lunar-layers-031320154
- La sonde chinoise Chang'e-4 passe de nouveau en mode veille, Renmin Ribao (« Quotidien du Peuple »), édition française, 14 février 2019
- (en) Jason Davis, « India's Vikram Spacecraft Apparently Crash-Lands on Moon », The Planetary Society, .
- (en) NASA, NASA’s Lunar Exploration Program Overview, NASA, , 74 p. (lire en ligne [PDF]).
- (en) Artem Ivankov, « Mars 3 », sur NASA -NSSDC (consulté le ).
- (en) Fast Facts, « Mars 3 » [archive du ], sur NASA -Solar System Exploration (consulté le ).
- (en) David R. Williams., « Mars Pathfinder Rover », sur NASA -NSSDC (consulté le ).
- (en) JPL, « Update: Spirit and Opportunity », sur NASA -NSSDC (consulté le ).
- http://curiosityrover.com/tracking/drivelog.html
- Le Monde avec AFP, « La Chine a lancé une sonde vers Mars, dans l’espoir de faire des analyses à la surface. », sur Le Monde, (consulté le ).
- Rémy Decourt, « Tianwen-1 : lancement réussi de l'ambitieuse mission chinoise vers Mars. », sur Futura, (consulté le ).
- Le Monde avec AFP, « Le robot de la NASA qui cherchera des traces de vie passée sur Mars a quitté la Terre. », sur Le Monde, (consulté le )
- Xavier Demeersman, « En vidéo : revivez le lancement vers Mars de la mission historique Perseverance. », sur Futura, (consulté le )
- Lucie Aubourg, AFP, « La sonde Perseverance se pose sur Mars », La Presse, .
- (en) David R. Williams, « The Apollo Lunar Roving Vehicle », sur NASA -NSSDC (consulté le ).
Voir aussi
Bibliographie
- (en) Andrew J. Ball, James R.C. Garry, Ralph D. Lorenz et Viktor V. Kerzhanovichl, Planetary Landers and entry Probes, Cambridge University Press, (ISBN 978-0-521-12958-9)Généralités sur les astromobiles.
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, Springer Praxis, , 529 p. (ISBN 978-0-387-09627-8, présentation en ligne)À propos de Sejourner.
- (en) Paolo Ulivi et David M. Harland, Robotic exploration of the solar system : Part 4 : the Modern Era 2004-2013, Springer Praxis, , 567 p. (ISBN 978-1-4614-4811-2)À propos de MER et Curiosity.
- (en) Wesley T. Huntress et Mikhail Ya. Marov, Soviet Robots in the Solar System : missions technologies and discoveries, New York, Springer Praxis, , 453 p. (ISBN 978-1-4419-7898-1, BNF 44661949, présentation en ligne)À propos des missions Lunokhod.
- (en) Roger Wiens, Red Rover, Basic Books, , 256 p. (ISBN 978-0-465-05598-2)Historique du projet de l'astromobile Curiosity.
- (en) Emily Lakdawalla, The Design and Engineering of Curiosity : How the Mars Rover Performs Its Job, Springer, (ISBN 978-3-319-68144-3)Historique et caractéristiques de l'astromobile Curiosity.
- (en) Rob Manning et William L. Simon, Mars Rover Curiosity : An Inside Account from Curiosity's Chief Engineer, Smithsonian Books, , 240 p. (ISBN 978-1-58834-474-8, présentation en ligne)Historique du projet de l'astromobile Curiosity.
- (en) Michel van Pelt, Space Invaders : how robotics spacecraft explore the solar system, Praxis, , 312 p. (ISBN 978-0-387-33232-1).
Articles connexes
- Sonde spatiale
- Programme Lunokhod
- Rover lunaire Apollo
- Mars Exploration Rover
- Mars Science Laboratory, embaruant l'astromobile Curiosity
- Chang'e 3
- Rover ExoMars