SuperCam
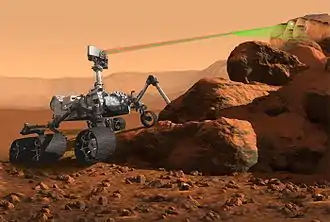
SuperCam est un des sept instruments scientifiques équipant l'astromobile américain Perseverance (mission Mars 2020) qui depuis début 2021 explore la surface de la planète Mars. L'objectif principal de cette mission est de collecter des échantillons du sol susceptibles d'avoir conservé des traces de forme de vie. Les carottes seront ramenées sur Terre pour analyse dans le cadre d'une mission ultérieure. Le rôle de SuperCam est d'effectuer une première analyse à distance (jusqu'à 7 mètres) de la composition du sol et des roches avoisinantes pour identifier les cibles présentant un intérêt scientifique et fournir le contexte géologique.
SuperCam met en œuvre quatre différentes techniques pour déterminer à distance la composition du sol, des roches et de l'atmosphère : les spectroscopie LIBS et spectroscopie Raman qui déterminent la composition élémentaire et moléculaire en analysant la lumière résultant du bombardement par un laser, la spectroscopie de réflectance visible et infrarouge qui contribue à identifier les minéraux et une caméra couleur qui fournit des informations sur la texture et la morphologie des roches. Enfin SuperCam comprend un microphone.
Supercam est l'héritier de l'instrument ChemCam installé à bord de l'astromobile Curiosity (mission Mars Science Laboratory) qui explore le sol martien depuis 2012. Comme ChemCam il est développé conjointement par l'Institut de recherche en astrophysique et planétologie (France), qui fournit la tête optique, le laser et le spectromètre infrarouge et le Laboratoire national de Los Alamos (Etats-Unis) qui fournit les spectromètres Raman et LIBS.
Historique
.jpg.webp)
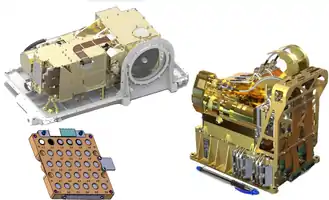
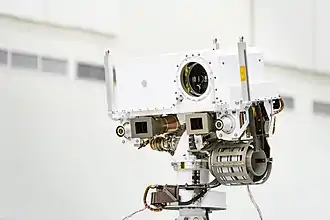
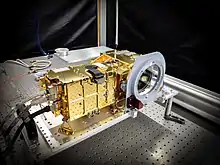
Le développement de SuperCam débute en juillet 2014 lorsque l'instrument est retenu pour faire partie de la charge utile de l'astromobile américain Perseverance (mission Mars 2020) qui doit explorer la surface de la planète Mars à compter de 2021. L'instrument SuperCam est une version fortement améliorée de l'instrument franco-américain ChemCam embarqué sur l'astromobile Curiosity qui explore la surface de Mars depuis 2012. Comme ce dernier SuperCam utilise un laser pour vaporiser à distance la couche superficielle des roches ciblées et générer un plasma. Celui-ci est analysé pour déterminer la composition élémentaire des roches. Mais alors que ChemCam disposait de deux fonctionnalités (spectroscopie LIBS et un imageur noir et blanc) SuperCam comporte cinq fonctionnalités : spectroscopie LIBS, spectroscopie Raman, spectroscopie infrarouge passive, imageur couleur et microphone. Comme pour ChemCam l'instrument est conçu et réalisé conjointement par le LANL américain responsable de trois des spectromètres (Body Unit) et l'institut de recherche en astrophysique et planétologie (IRAP) de l'université Paul Sabatier de Toulouse en France qui est le chef de file du sous-ensemble porté par le mât (Mast Unit) comprenant le laser, la partie optique, l'imageur, le spectromètre infrarouge et le micro. La maîtrise d'ouvrage de la participation française est prise en charge par l'agence spatiale française (CNES)[1] - [2]. Le responsable scientifique est Roger Wiens de Los Alamos et son adjoint Sylvestre Maurice de l'IRAP[3] - [4].
Le développement de l'instrument et l'analyse des données produites implique environ 300 personnes en France (répartis dans 15 laboratoires et 25 entreprises), 200 personnes aux Etats-Unis ainsi que plusieurs personnes en Espagne. Les principaux laboratoires français impliqués sont l'IRAP chef de file et le LESIA. Les deux principaux intégrateurs industriels sont Thales pour le laser et 3D PLUS pour l'imageur. Le cout de la participation française de la conception à l'exploitation des données est d'environ 40 millions € (coût global de la mission ~2 milliards €)[5].
Les concepteurs du Mast Unit confié à la France doivent satisfaire les mêmes contraintes de volume, masse et consommation électrique que pour ChemCam alors que SuperCam comporte de nombreuses fonctionnalités supplémentaires. Les caractéristiques héritées de l'instrument précédent sont finalement réduites. La revue critique de conception de l'instrument (CDR Critical Design Review) est franchie avec succès décembre 2016 et la construction du modèle de vol débute. En novembre 2018 à un mois de la livraison du Mast Unit au JPL (NASA), le modèle de vol est rendu inutilisable à la suite d'un incident technique[Note 1]. Les équipes doivent reconstruire et tester un nouveau modèle de vol en 6 mois. Celui-ci s'avère plus performant que le premier exemplaire grâce à des modifications dans le traitement du miroir qui permettent d'améliorer ses performances au froid. Le modèle de vol est livré au Jet Propulsion Laboratory (établissement de la NASA chargé de la mission) en juin 2019. Les tests d'intégration qui ont lieu d'abord au JPL puis au centre spatial Kennedy s'achèvent en juin 2020. L'astromobile est lancé dans l'espace le 30 juillet 2020 et atterrit sur le sol de Mars le 18 février 2021. Après une recette qui va de février à mai 2021, l'astromobile commence sa mission scientifique[4] - [5] - [6]..
Principes de fonctionnement
La caractéristique la plus notable de SuperCam est l'utilisation d'un laser pour analyser à distance (jusqu'à 7 mètres) la composition du sol et des roches situées à proximité de l'astromobile. Le faisceau laser envoie de brèves impulsions de lumière d'une durée de 5 nanosecondes sur une petite fraction du sol. Leur énergie vaporise la roche et produit un plasma dont la lumière est recueillie par le télescope de l'instrument doté d'une optique de 110 mm. Cette technique active est utilisée pour effectuer de la spectroscopie LIBS et Raman. Par ailleurs l'instrument permet des observations passives grâce à un spectromètre de réflectance en lumière visible et proche infrarouge et un imageur disposant d'un fort pouvoir de grossissement qui fournit le contexte de l'analyse effectuée. La lumière produite par les trois méthodes de spectroscopie est analysée par quatre spectromètres qui fournissent un spectre pouvant s'étendre selon les méthodes de l'ultraviolet (240 nanomètres) à l'infrarouge proche (2,6 microns).
Fonctionnalités de SuperCam
Spectroscopie LIBS
Le spectromètre LIBS (Laser-Induced Breakdown Spectroscopy) est une version améliorée du LIBS de ChemCam. L'instrument utilise le laser dans la longueur d'onde 1 064 nm (laser rouge) pour, in fine, identifier et quantifier les éléments chimiques présents dans la roche à une distance allant jusqu'à 7 mètres. Le spectromètre analyse la lumière de l'excitation rayonnée, dans la gamme du visible, débordant largement dans l'ultraviolet d'un côté, et de l'autre, dans la gamme dite du proche infra-rouge, au total, une bande spectrale allant de 240 nm (UV) à 850 nm (proche infra-rouge), et ce avec une résolution variable allant de 0,09 à 0,30 nm. À l'issue de la mesure physique, une chaîne de traitement des données spectrales fournit une composition dite élémentaire, le plus souvent en termes de pourcentages pondéraux des divers oxydes d'éléments chimiques, selon l'usage en pétrologie.
Cette technique de spectroscopie permet de déterminer les éléments chimiques majeurs (oxygène, sodium, magnésium, aluminium, silicium, potassium, calcium, fer) ainsi que certains éléments mineurs ou sous forme de trace (soufre, phosphore, hydrogène, azote, titane, chrome, nickel, cuivre, zinc, rubidium, arsenic, cadmium, plomb, fluor , chlore, lithium, strontium, baryum[5].
Spectroscopie de réflectance visible et infrarouge VISIR
Le spectromètre infrarouge passif VISIR (Visible and Infrared Spectroscopy) fourni par le Laboratoire d'études spatiales et d'instrumentation en astrophysique n'analyse pas le plasma généré par les impacts laser mais exploite la lumière réfléchie par la lumière sur le terrain. Il fournit des spectres en lumière visible-proche infrarouge (400-900 nm) et en proche infrarouge (1,3-2,6 microns) qui permettent d'identifier en particulier les argiles. Le spectre est obtenu à l'aide d'un filtre à dispersion acousto-optique dérivé des instruments CRISM (Mars Reconnaissance Orbiter) et OMEGA (Mars Express). La portée de l'instrument est de 10 kilomètres.
les minéraux détectés par cette technique de spectroscopie sont des silicates (pyroxènes, olivine, serpentines, smectite, talc, kaolinite, zeolites), des sulfates (mono et poly-hydratés), des carbonates, des composés d’intérêt astrobiologique (borates, nitrates et phosphates), des molécules d’eau (adsorbées, interstitielles, glaces) et des sels hydratés[5].
Spectroscopie Raman / fluorescence
Le spectromètre Raman / Fluorescence TRR/L (Time-Resolved Raman and Luminescence) utilise le laser dans la longueur d'onde 532 nm (vert) pour faire vibrer les molécules. Une faible fraction de la lumière interagit avec les molécules et change de longueur d'onde. Ce « signal Raman » est très faible et il faut l'intensifier. Il est analysé par le spectromètre et permet d'identifier les minéraux et les molécules présentes dans la cible. L'information fournie est complémentaire de celle produite par le spectromètre infrarouge décrit ci-dessous. Pour ce type d'analyse la portée du laser est de 12 mètres.
Les minéraux détectés par cette technique de spectroscopie sont les mêmes que ceux observés en infrarouge de réflectance avec toutefois une meilleure sensibilité aux organiques et une zone analysée beaucoup plus petite[5].
Micro-imageur couleur RMI
Le micro-imageur RMI (Remote Micro-Imager) est une caméra en couleurs à résolution spatiale élevée, placée derrière le télescope Schmidt-Cassegrain (ouverture de 110 mm et longueur focale de 563 mm), qui peut produire une image microscopique centrée sur la zone visée par le laser en fournissant des éléments de contexte géologique : texture de la roche et dans le cas d'un sol, des caractéristiques comme son hétérogénéité, sa structure et sa cohésion. La caméra est également utilisée pour effectuer des mesures des caractéristiques de l'atmosphère : profils verticaux, propriétés de la vapeur d'eau en suspension ainsi que d'autres gaz, poussière et particules de glace d'eau en suspension. Le champ de vue est de 18,8 milliradians et la résolution spatiale qui est supérieure à 80 microradians couvre 4 pixels et permet de distinguer des détail de 0,24 millimètres à une distance de 3 mètres. RMI permet de prendre des images jusqu'à l'infini. La caméra dispose d'un autofocus qui peut utiliser une des deux techniques suivantes : détection par une photodiode de la réflexion sur la cible à photographier du rayon laser fonctionnant en continu ou, méthode privilégiée, prise de plusieurs photos successives de la cible avec des ouvertures différentes et détermination de l'ouverture optimale par un logiciel analysant le contraste des images résultantes. Plusieurs fonctions peuvent être mises en oeuvre lors de la prise d'image : réalisation de quatre images avec des ouvertures différentes, fusion d'images prises avec des distances focales différentes, fusion de photos prises avec des temps d'exposition différentes pour améliorer la plage dynamique (HDR). L'image panchromatique est obtenue par la caméra CASPEX (Color CMOS Camera for Space Exploration) comprenant un détecteur CMOS CMV4000 de 4 mégapixels de la société AMS CMOSIS équipé de filtres colorés et de micro-lentilles au-dessus de chaque pixel L'ensemble de l'électronique et le détecteur sont empilés dans un ensemble cubique compact réalisé par la société 3D PLUS[7] - [8] - [9] - [10].
Microphone
L'instrument SuperCam comprend un microphone MIC situé aur la tête optique et couplé avec la caméra couleur. Le Mars Microphone enregistre les sons de claquage des étincelles des plasmas produits par le laser qui permettent d'en déduire différents paramètres physiques (dureté et densité) venant ainsi améliorer l'analyse des spectres LIBS. Ces sons, souvent appelés de manière imagée « impacts laser », sont audibles jusqu'à une distance de 4 mètres. L'atmosphère de Mars, très ténue, limite fortement la propagation du son qui est atténué de 20 décibels par rapport à la Terre[Note 2]. Le microphone enregistre également les bruits produits par les mécanismes de l'astromobile "Perseverance" (rotation de la tourelle, bruit de roulement, etc.), ce qui devrait contribuer à établir les diagnostics en cas de dysfonctionnement. Enfin, ce micro permettra d'enregistrer les sons de la planète Mars s'ils sont transmis par l'atmosphère très ténue (vent, tonnerre). L'instrument, qui ne fait pas partie de la charge utile scientifique, a été financé par l'association The Planetary Society et est identique au modèle lancé en 1999 déjà sponsorisé par cette association. Constitué principalement d'une carte électronique, il pèse environ 50 grammes[11] - [12] - [5].
Cibles d'étalonnage SCCT
_PIA24491.jpg.webp)
35 cibles sont utilisées pour étalonner les différents sous-systèmes de l'instrument et forment le SCCT (SuperCam Calibration Target). Elles sont montées sur une plaque de titane, située à gauche du générateur d'électricité (RTG) sous l'une des antennes principales de communication. Les cibles comprennent 23 échantillons géologiques, 5 cibles utilisées pour étalonner le spectromètre infrarouge passif, un échantillon organique, un diamant, quatre cibles destinées à étalonner l'imageur et un morceau d'astéroïde martienne récupérée sur Terre et destinée à une opération de sensibilisation du public. Les cibles passives, qui ne sont pas nettoyées par le laser, sont entourées par un aimant permanent qui permet de réduire l'accumulation de la poussière martienne (celle-ci est partiellement magnétisée). Le développement de ce sous-ensemble est sous la responsabilité de l'Université de Valladolid[13].
Caractéristiques techniques
SuperCam a une masse totale de 10,6 kg répartie entre le module optique logé dans le mât (Mast Unit 5,6 kg), les spectromètres logés dans le corps de l'astromobile (Body Unit 4,8 kg) et les cibles utilisées pour étalonner l'instrument (0,2 kg) qui sont fixées sur le pont supérieur à l'arrière de l'astromobile. Les données collectées par la tête optique sont transmises aux spectromètres du Body Unit par une fibre optique. L'instrument en fonctionnement consomme 17,9 watts. Il génère un volume de données moyen de 4,2 mégabits par jour[14].
Spectromètres
SuperCam dispose de quatre spectromètres qui couvrent chacun une partie de la bande spectrale observée par l'instrument et qui sont utilisés par une ou plusieurs techniques de spectroscopie. Le spectromètre infrarouge se situe dans le Mast Unit alors que les trois autres se trouvent dans le Body Unit.
| Bande spectrale analysée | Ultraviolet | Violet | Visible | Infrarouge |
|---|---|---|---|---|
| Type spectromètre | Monochromateur Czerny-Turner | EELS | AOTF | |
| Position | Chassis | Chassis | Chassis | Mât |
| Type spectroscopie | LIBS | LIBS et VISIR (visible et infrarouge) | Raman, LIBS, VISIR | VISIR |
| Détecteur | CCD | ICCD | Photodiode | |
| Longueurs d'onde (nm) | 240–340 | 385–475 | 535–855 | 1300–2600 |
| Nombre de canaux | 2048 | 2048 | 6000 | 256 |
| Résolution | 0.20 nm | 0.20 nm | 0.3–0.4 nm | 30/cm |
| Champ de vue | 0.7 mrad | 0.7 mrad | 0.7 mrad | 1.15 mrad |
Mise en œuvre
SuperCam peut être utilisé de différentes manières. Un enchainement typique commence par la sélection d'une cible (roche,...) par l'équipe scientifique sur Terre à partir de photos prises par l'astromobile et la transmission des coordonnées de la roche à analyser à l'ordinateur de l'astromobile ainsi que la séquence des commandes à exécuter. La cible peut être également déterminée de manière autonome par le logiciel embarqué AEGIS qui utilise un algorithme de reconnaissance de formes ou également en aveugle. La séquence suivante d'opérations est lancée[16] :
- Mise en température des détecteurs des spectromètres (refroidissement de 15-20 minutes), du laser (sa température est portée à -15 ou -10°)
- La partie optique est pointée vers la cible et la mise au point est effectuée par l'autofocus.
- Une photo de la cible est prise par l'imageur RMI
- Le laser (rouge) produit une rafale d'une trentaine d'impulsions dont les premières décapent la roche et les suivantes génèrent un plasma qui est analysé par spectroscopie LIBS pour produire autant de spectres. Le microphone est activé pour enregistrer le son produit par les impacts du laser.
- Le dispositif permettant de doubler la longueur d'onde du laser qui devient vert est activé et le laser produit de 100 à 200 impulsions avec une fréquence de 10 hertz. Les spectres produits sont enregistrés.
- Les opérations de spectroscopie passive infrarouge qui ne nécessitent pas la mise en œuvre du laser sont effectuées ensuite. À cet effet la température du détecteur est préalablement abaissée de 50° par rapport à la température du boitier qui le contient.
- Une fois tous ces spectres obtenus, une deuxième photo est prise avec l'imageur RMI et la première séquence de mesures s'achève. Celle-ci prend environ 19 minutes dont les deux tiers correspondent à la phase de préchauffage qui n'est pas répétée lorsque plusieurs parties de la cible situées côte à côte sont successivement analysées comme c'est généralement le cas. La puissance électrique totale consommée durant la première séquence est de 13,8 watts-heures avec un voltage en pointe de 69,7 watts. Le volume de données généré est de 26,5 mégaoctets. Pour effectuer une deuxième analyse de la cible, la tête optique se déplace pour pointer quelques millimètres plus loin et une nouvelle séquence de tirs lasers est entamée.
Notes et références
Notes
- Lors d'une opération de séchage d'un collage de la partie optique dans une étuve de l'IRAP, la température dépasse accidentellement les 50°C autorisés pour ce composant.
- Le son est filtré comme si, sur Terre, une cloison en plâtre de 1 cm d’épaisseur était interposé entre le micro et sa source.
Références
- « Mission > Instruments > SuperCam > For scientists », sur NASA - MARS 2020 (consulté le ).
- (en) Roger Wiens, « ‘SuperCam’ Update: Multi-purpose Instrument Coming Together for 2020 Launch to Mars », The Planetary Society, .
- « Mission > Instruments > SuperCam > Team », sur NASA - MARS 2020 (consulté le )
- « [MARS 2020] SuperCam, l’innovation made in France », CNES,
- « MISSION MARS 2020 - Atterrissage du rover Perseverance », CNES,
- « Exclusif : incident de fabrication sur la caméra laser toulousaine prête à partir sur Mars », La dépêche,
- « SuperCam et ses super capteurs », CNES,
- The SuperCam Instrument Suite on the NASA Mars 2020 Rover: Body Unit and Combined System Tests, p. 8-9
- (en) O. Gasnault, C. Virmontois, S. Maurice1 et R.C. Wiens « Whet SuperCam will seee : the remo micro-imager aboard perseverance » () (lire en ligne) [PDF]
—52nd Lunar and Planetary Science Conference 2021 - Mars 2020 Mission Overview, p. 141
- « Instrument Supercam sur le rover Mars 2020 », CNES, .
- (en) Nancy Atkinson, « Perseverance Microphones Fulfill Planetary Society Campaign to Hear Sounds from Mars », The Planetary Society, .
- (en) J.A. Manrique, G. Lopez-Reyes, A. Cousin et al., « SuperCam Calibration Targets: Design and Development », Space Science Reviews, no 216, , p. 1-27 (DOI 10.1007/s11214-020-00764-w.pdf, lire en ligne)
- « Mission > Instruments > SuperCam > Overview », sur NASA - Mars 2020 (consulté le )
- (en) Roger C. Wiens Rull Perez, Sylvestre Maurice, Fernando Rull Perez et al., « SuperCam Calibration Targets: Design and Development », Spectroscopy, vol. 32, no 5, , p. 50-55 (lire en ligne)
- The SuperCam Instrument Suite on the NASA Mars 2020 Rover: Body Unit and Combined System Tests, p. 39-42
Bibliographie
- (en) Roger C. Wiens, Sylvestre Maurice, Scott H. Robinson et al., « The SuperCam Instrument Suite on the NASA Mars 2020 Rover: Body Unit and Combined System Tests », Space Science Reviews, nos 216,4, , p. 1-87 (DOI https://doi.org/10.1007/s11214-020-00777-5, lire en ligne)Caractéristiques de l'instrument SuperCam et réalisation des tests d'intégration.
- (en) J.A. Manrique, G. Lopez-Reyes, A. Cousin et al., « SuperCam Calibration Targets: Design and Development », Space Science Reviews, no 216, , p. 1-27 (DOI 10.1007/s11214-020-00764-w.pdf, lire en ligne)Caractéristiques du système d'étalonnage.
- (en) Kenneth A. Farley, Kenneth H. Williford, Kathryn M. Stack, Rohit Bhartia, Al Chen et al., « Mars 2020 Mission Overview », Space Sci Rev, vol. 216, no 142, , p. 41 (DOI 10.1007/s11214-020-00762-y, lire en ligne)Présentation de la mission Mars 2020/Perseverance : caractéristiques techniques, déroulement, contexte et objectifs scientifiques.