SL2(R)
En mathématiques, le groupe spécial linéaire SL(2, R) ou SL2(R) est le groupe des matrices réelles 2 × 2 de déterminant un :

C'est un groupe de Lie réel simple non compact, connexe, de dimension 3, qui intervient dans des applications en géométrie, en topologie, en théorie des représentations et en physique.
Le groupe SL(2, R) agit sur le demi-plan de Poincaré par des fonctions homographiques. Cette action de groupe se factorise par le quotient PSL(2, R) (le groupe spécial linéaire projectif (en) d'ordre 2 sur R). Plus précisément,
- PSL(2, R) = SL(2, R) / {±I},
où I désigne la matrice identité de taille 2 × 2. Ce groupe contient le groupe modulaire PSL(2, Z).
Le groupe SL(2, R) admet un revêtement double, Mp(2, R), un groupe métaplectique, ce qui provient du fait qu'on peut considérer SL(2, R) comme un groupe symplectique.
Un autre groupe apparenté est SL±(2, R), le groupe des matrices réelles 2 × 2 de déterminant ±1 ; ce groupe est cependant plus souvent utilisé dans le contexte du groupe modulaire.
Descriptions
Le groupe SL(2, R) est le groupe de toutes les transformations linéaires bijectives de R2 qui préservent l'aire orientée. Il est isomorphe au groupe symplectique Sp(2, R) et au groupe spécial unitaire SU(1, 1). Il est également isomorphe au groupe des coquaternions de norme 1. Le groupe SL±(2, R) préserve l'aire non orientée : ses éléments peuvent inverser l'orientation.
Le quotient PSL(2, R) admet plusieurs descriptions intéressantes :
- c'est le groupe des transformations projectives qui préservent l'orientation de la droite projective réelle R ∪ {∞} ;
- c'est le groupe des automorphismes conformes du disque unité ;
- c'est le groupe des isométries préservant l'orientation du plan hyperbolique ;
- c'est le groupe de Lorentz restreint de l'espace de Minkowski de dimension trois ; de manière équivalente, il est isomorphe au groupe orthogonal SO+(1, 2) de la forme de signature (1, 2) ; il s'ensuit que SL(2, R) est isomorphe au groupe spinoriel Spin(2,1)+.
Les éléments du groupe modulaire PSL(2, Z) ont des interprétations supplémentaires, de même que les éléments du groupe SL(2, Z) (en tant que transformées linéaires du tore), et ces interprétations peuvent également être vues à la lumière de la théorie générale de SL(2, R).
Homographies
Les éléments de PSL(2, R) sont des homographies sur la droite projective réelle R ∪ {∞} :
![{\displaystyle [x,1]\mapsto [x,\ 1]{\begin{pmatrix}a&c\\b&d\end{pmatrix}}\ =\ [ax+b,\ cx+d]\ =\,\left[{\frac {ax+b}{cx+d}},\ 1\right].}](https://img.franco.wiki/i/ac9fecb3b29c144f054189bc958c230949c38129.svg)
Ces transformations projectives forment un sous-groupe de PSL(2, C), qui agit sur la sphère de Riemann par des transformations de Möbius.
Lorsque la droite réelle est considérée comme la frontière du plan hyperbolique, PSL(2, R) représente les déplacements hyperboliques.
Transformations de Möbius
Les éléments de PSL(2, R) agissent sur le plan complexe par des transformations de Möbius :

C'est précisément l'ensemble des transformations de Möbius complexes qui préservent le demi-plan supérieur. Il en résulte que PSL(2, R) est le groupe des automorphismes conformes du demi-plan supérieur. Par le théorème de représentation conforme de Riemann, ou simplement parce que la transformation conforme envoie le demi-plan de Poincaré sur le disque unité, il est également isomorphe au groupe des automorphismes conformes du disque unité.

Ces transformations de Möbius sont les isométries du modèle du demi-plan de Poincaré du plan hyperbolique, et les transformations de Möbius correspondantes du disque sont les isométries du modèle du disque de Poincaré.
La formule ci-dessus peut également être utilisée pour définir les transformations de Möbius des nombres duaux et déployés. Les géométries correspondantes entretiennent des relations non triviales[1] avec la géométrie de Lobatchevski.
Représentation adjointe
Le groupe SL(2, R) agit sur son algèbre de Lie sl(2, R) par conjugaison (rappelons que les éléments de l'algèbre de Lie sont toutes les matrices réelles 2 × 2), ce qui donne une représentation linéaire fidèle de dimension trois de PSL(2, R). Elle peut également être décrite comme l'action de PSL(2, R) sur l'espace des formes quadratiques sur R2. En choisissant des bases convenables, on obtient la représentation suivante :

La forme Killing sur sl(2, R) a pour signature (2, 1), elle induit un isomorphisme entre PSL(2, R) et le groupe de Lorentz SO+(2, 1). Cette action de PSL(2, R) sur l'espace de Minkowski se restreint à l'action de PSL(2, R) par isométries sur le modèle de l'hyperboloïde du plan hyperbolique.
Classification des éléments
Spectre
Une valeur propre d'un élément A ∈ SL(2, R) est une racine du polynôme caractéristique


de sorte que

Cela conduit à la classification suivante des éléments, avec une description correspondante de leur action sur le plan euclidien :
- si |tr(A)| < 2, alors A est dit elliptique et est conjugué à une rotation (les valeurs propres sont complexes conjuguées) ;
- si |tr(A)| = 2, alors A est appelé parabolique, et est une transvection (il y a une valeur propre double, égale à ± 1) ;
- si |tr(A)| > 2, alors A est appelé hyperbolique, et est une rotation hyperbolique (les valeurs propres sont réelles, inverses l'une de l'autre).
Les noms correspondent à la classification des coniques selon leur excentricité : si l'on définit l'excentricité comme la moitié de la valeur absolue de la trace (ε = ½ tr ; diviser par 2 tient compte de la dimension, alors que la valeur absolue correspond à travailler au signe près comme si l'on était dans PSL(2,R)), on obtient la correspondance suivante : , elliptique ; , parabolique ; , hyperbolique.



L'élément neutre I et son opposé −I (dans PSL(2, R) ils sont identifiés), ont une trace ±2, et sont donc des éléments paraboliques d'après la classification précédente, bien qu'ils soient souvent considérés à part.
La même classification est utilisée pour SL(2, C) mais aussi, puisque la trace d'un élément du groupe projectif est définie au signe près et que la classification ne tient compte que du module de la trace, pour PSL(2, C) (transformations de Möbius) et PSL(2, R) (transformations de Möbius réelles). Dans les groupes complexes, on trouve en plus des transformations dites loxodromiques lorsque la trace est complexe. Il existe des classifications analogues (en) par une notion d'excentricité.
Un sous-groupe qui ne contient que des éléments elliptiques (respectivement paraboliques, hyperboliques), en plus de l'identité et de son opposée, est appelé un sous-groupe elliptique (respectivement sous-groupe parabolique, sous-groupe hyperbolique).
Il s'agit d'une classification en sous-ensembles et non en sous-groupes : ces ensembles ne sont pas stables par multiplication (le produit de deux éléments paraboliques n'est pas toujours parabolique, etc.). Cependant, tout élément est conjugué à un élément de l'un de trois sous-groupes à un paramètre standards (éventuellement au signe près), comme détaillé ci-dessous.
Topologiquement, comme la trace est une application continue, les éléments elliptiques (en excluant ±I) forment un ensemble ouvert, tout comme les éléments hyperboliques (en excluant ±I), tandis que les éléments paraboliques (en incluant ±I) sont un ensemble fermé.
Éléments elliptiques
Les valeurs propres d'un élément elliptique sont toutes deux complexes, conjuguées et de module un. Un tel élément est conjugué à une rotation du plan euclidien – on peut les interpréter comme des rotations dans une base éventuellement non orthogonale – et l'élément correspondant de PSL(2, R) agit comme (conjugué à) une rotation du plan hyperbolique et de l'espace de Minkowski.
Les éléments elliptiques du groupe modulaire doivent avoir des valeurs propres {ω, ω−1}, où ω est une racine de l'unité primitive d'ordre trois, quatre ou six. Ce sont tous les éléments du groupe modulaire d'ordre fini, et ils agissent sur le tore comme des difféomorphismes périodiques.
Les éléments de trace nulle sont parfois appelés éléments circulaires (par analogie avec l'excentricité) ; ils correspondent à des éléments de valeurs propres ± i, et sont conjugués à une rotation d'angle 90°, dont le carré est – I : ce sont les involutions non triviales dans PSL(2).
Un élément elliptique admet un conjugué appartenant au sous-groupe des rotations du plan euclidien, le groupe spécial orthogonal SO(2) ; l'angle de la rotation est l'arccosinus de la moitié de la trace, il est défini à un signe près déterminé par l'orientation. (Une rotation et son inverse sont conjuguées dans GL(2) mais pas dans SL(2).)
Éléments paraboliques
Un élément parabolique n'a qu'une seule valeur propre, qui est soit 1, soit –1. Un tel élément agit comme une transvection sur le plan euclidien et l'élément correspondant de PSL(2, R) agit comme une rotation limite du plan hyperbolique et comme une rotation nulle de l'espace de Minkowski.
Les éléments paraboliques du groupe modulaire agissent sur le tore comme des torsions de Dehn.
Les éléments paraboliques sont conjugués dans le groupe à une transvection éventuellement multipliée par un signe, c'est-à-dire à une matrice de la forme . En fait, ils sont tous conjugués (dans SL(2)) à l'une des quatre matrices , (dans GL(2) ou SL±(2), le signe ± peut être omis, mais pas dans SL(2)).



Éléments hyperboliques
Les valeurs propres d'un élément hyperbolique sont à la fois réelles et inverses l'une de l'autre. Un tel élément agit comme une rotation hyperbolique du plan euclidien et l'élément correspondant de PSL(2, R) agit comme une translation du plan hyperbolique et comme un boost de Lorentz sur l'espace de Minkowski.
Les éléments hyperboliques du groupe modulaire agissent sur le tore comme des difféomorphismes d'Anosov.
Un élément hyperbolique est, au signe près, conjugué à une rotation hyperbolique standard, c'est-à-dire à une matrice de la forme ; l'angle hyperbolique de la rotation hyperbolique est l'argument du cosinus hyperbolique de la moitié de la trace, à un signe près : contrairement au cas elliptique, une rotation hyperbolique et son inverse sont conjugués dans SL(2) (par une rotation des axes ; pour les axes standards, un quart de tour).

Classes de conjugaison
Les matrices 2 × 2 ayant deux valeurs propres distinctes sont diagonalisables sur C donc les éléments non paraboliques de SL(2) sont, à conjugaison dans GL(2) près (ou même SL±(2)), classés par la trace (en effet le déterminant est fixé et la trace et le déterminant déterminent les valeurs propres des matrices 2 × 2 ; de plus, deux matrices réelles conjuguées dans GL(2, C) le sont aussi dans GL(2,R)). Pour les matrices ayant une valeur propre double, on observe que les éléments ± I et les éléments paraboliques de traces ±2 ne sont pas conjugués (les premiers sont diagonalisables, au contraire des seconds).
À conjugaison dans SL(2) près (au lieu de GL(2)), il faut introduire une donnée supplémentaire correspondant à l'orientation : une rotation et son inverse (éléments elliptiques) ne sont pas conjuguées, de même qu'une transvection positive et son inverse, comme on l'a vu ci-dessus. Ainsi pour une trace de valeur absolue strictement inférieure à 2, il y a deux classes de conjugaison pour chaque trace (rotations dans le sens trigonométrique et dans le sens des aiguilles d'une montre) ; pour une trace égale à ±2 il y a trois classes de conjugaison pour chaque trace (transvection positive, ± I, transvection négative) ; pour une trace de valeur absolue strictement supérieure à 2, il n'y a en revanche qu'une seule classe de conjugaison par trace.
Décomposition d'Iwasawa ou KAN
La décomposition d'Iwasawa d'un groupe est une méthode pour présenter le groupe comme un produit de trois sous-groupes de Lie K, A, N. Pour ces trois sous-groupes sont




L'énoncé précis exprime que l'application produit

est un homéomorphisme (mais bien sûr pas un morphisme de groupes).
Les groupes K, A et N contiennent respectivement les formes normales pour les sous-ensembles elliptique, hyperbolique et parabolique.
Topologie et revêtement universel
Comme espace topologique, PSL(2, R) peut être décrit comme le fibré tangent unitaire du plan hyperbolique. C'est un fibré en cercles (en), il a une structure de contact naturelle induite par la structure symplectique sur le plan hyperbolique. Quant à SL(2, R), c'est un revêtement double de PSL(2, R), il peut être considéré comme le fibré des spineurs sur le plan hyperbolique.
Le groupe fondamental de SL(2, R) est le groupe monogène infini Z. Le revêtement universel, noté , est un exemple de groupe de Lie de dimension finie qui n'est pas un groupe de matrices. Autrement dit, n'admet aucune représentation fidèle de dimension finie.

En tant qu'espace topologique, est un fibré en droites sur le plan hyperbolique. Lorsqu'il est muni d'une métrique invariante à gauche, la 3-variété devient l'une des huit géométries de Thurston. Par exemple, est la couverture universelle du fibré tangent unitaire de toute surface de Riemann hyperbolique. Toute variété modelée sur est orientable et c'est un fibré en cercles sur une orbifold hyperbolique de dimension deux (un fibré de Seifert).
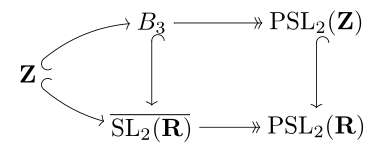
L'image réciproque par ce revêtement du groupe modulaire PSL(2, Z) est le groupe de tresses sur 3 brins, B3, qui est l'extension centrale universelle du groupe modulaire. Ces groupes sont des réseaux de groupes algébriques convenables et cela correspond algébriquement au revêtement universel en topologie.
Le groupe de revêtement double peut être identifié au groupe métaplectique Mp(2, R), quand on considère SL(2, R) comme le groupe symplectique Sp(2, R).
Les groupes mentionnés ci-dessus peuvent être mis ensemble dans un complexe :

Il existe d'autres revêtements de PSL(2, R). Plus précisément, il y en a un pour chaque entier naturel n car nZ est un sous-groupe de Z ≅ π1(PSL(2, R)). Ces groupes forment un treillis de groupes de revêtement ordonné par la divisibilité ; le groupe correspondant à n est un revêtement de SL(2, R) si et seulement si n est pair.
Structure algébrique
Le centre de SL(2, R) est le groupe à deux éléments {±I} et le quotient PSL(2, R) est simple.
Les sous-groupes discrets de PSL(2, R) sont appelés groupes fuchsiens (en). Ils sont l'analogue hyperbolique des groupes de papier peint euclidiens et des groupes de frises. Le plus célèbre d'entre eux est le groupe modulaire PSL(2, Z), qui agit sur un pavage du plan hyperbolique par des triangles idéaux.
Le groupe du cercle SO(2) est un sous-groupe compact maximal de SL(2, R), et le cercle SO(2) / {±I} est un sous-groupe compact maximal de PSL(2, R).
Le multiplicateur de Schur du groupe discret PSL(2, R) est beaucoup plus grand que Z et l'extension centrale universelle est beaucoup plus grande que le revêtement universel. Cependant ces grandes extensions centrales ne tiennent pas compte de la topologie et sont quelque peu pathologiques.
Théorie des représentations
Le groupe SL(2, R ) est un groupe de Lie simple réel et non compact, c'est la forme réelle scindée du groupe de Lie complexe SL(2, C). L'algèbre de Lie de SL(2, R), noté sl(2, R), est l'algèbre de Lie de toutes les matrices 2 × 2 réelles de trace nulle. C'est l'algèbre de Bianchi de type VIII.
La théorie des représentations en dimension finie de SL(2, R) est équivalente à la théorie des représentations de SU(2), qui est la forme réelle compacte de SL(2, C). En particulier, SL(2, R) n'a pas de représentation unitaire de dimension finie non triviale. C'est une caractéristique de tous les groupes de Lie simples connexes non compacts. Pour un aperçu de la preuve, voir la non-unitarisabilité des représentations (en).
La théorie des représentations de dimension infinie de SL(2, R) est vraiment intéressante. Le groupe admet plusieurs familles de représentations unitaires, qui ont été étudiées en détail par Gelfand et Naimark (1946), V. Bargmann (1947) et Harish-Chandra (1952).
Voir aussi
Articles connexes
- Groupe linéaire
- Groupe spécial linéaire
- Groupe projectif linéaire (en)
- Groupe modulaire
- SL(2, C) (transformations de Möbius)
- Transformation projective
- Groupe fuchsien (en)
- Table des groupes de Lie (en)
- Flot d'Anosov
Note
- Vladimir V. Kisil, Geometry of Möbius transformations. Elliptic, parabolic and hyperbolic actions of SL(2,R), Londres, Imperial College Press, , xiv+192 (ISBN 978-1-84816-858-9, DOI 10.1142/p835, MR 2977041)
Références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « SL(2,R) » (voir la liste des auteurs).
- Bargmann, « Irreducible Unitary Representations of the Lorentz Group », Annals of Mathematics, vol. 48, no 3, , p. 568–640 (DOI 10.2307/1969129, JSTOR 1969129, MR 0021942)
- Gelfand et Neumark, « Unitary representations of the Lorentz group », Acad. Sci. USSR. J. Phys., vol. 10, , p. 93–94 (MR 0017282)
- Harish-Chandra, « Plancherel formula for the 2×2 real unimodular group », Proc. Natl. Acad. Sci. U.S.A., vol. 38, no 4, , p. 337–342 (PMID 16589101, PMCID 1063558, DOI 10.1073/pnas.38.4.337, Bibcode 1952PNAS...38..337H, MR 0047055)
- Serge Lang, , vol. 105, New York, Springer-Verlag, coll. « Graduate Texts in Mathematics », (ISBN 0-387-96198-4, DOI 10.1007/978-1-4612-5142-2, MR 0803508)
- William Thurston, Three-dimensional geometry and topology. Vol. 1, vol. 35, Princeton, NJ, Princeton University Press, coll. « Princeton Mathematical Series », (ISBN 0-691-08304-5, MR 1435975)
