Aérobot
Un aérobot est un engin spatial mis en œuvre pour explorer les planètes et les lunes du système solaire, qui se déplace grâce à la portance produite par leur atmosphère. Sa mise en œuvre pour l'exploration d'une planètes ou d'un satellite naturel nécessite que celle-ci soit pourvue d'une atmosphère suffisamment dense, ce qui exclue notamment la Lune et Mercure. Ce peut être un ballon ou un aérodyne à voilure fixe (avion ou planeur) ou à voilure tournante (hélicoptère comportant un ou plusieurs rotors).
Trois destinations sont privilégiées pour les aérobots : Vénus (aérobot de type ballon), Mars et Titan. Plusieurs caractéristiques de ces corps célestes, telles que la densité de l'atmosphère, la gravité, l'intensité du flux solaire et la température, jouent un rôle important dans l'architecture et les capacités d'un aérobot.
Au début de l'ère spatiale, l'exploration du système solaire est effectuée par des orbiteurs, engins spatiaux qui survolent les planètes ou se placent en orbite autour de celles-ci. Pour les études in situ de ces corps, les agences spatiales développent par la suite des engins se posant sur le sol de la planète, fixes (atterrisseur) ou mobiles (astromobiles). La mobilité de ces derniers est toutefois restreinte par les accidents de terrain. Un aérobot présente l'avantage de pouvoir se déplacer beaucoup plus rapidement et étudier de vastes étendues tout en ayant la capacité d'effectuer des observations à faible distance ou in situ.
Les premiers aérobots sont les ballons lâchés dans l'atmosphère de Vénus en 1985 par les deux missions soviétiques du programme Vega. Poussés par le vent sans toutefois contrôler leur déplacement, les instruments embarqués collectent des informations sur la composition et la dynamique de l'atmosphère de cette planète. Au cours des décennies suivantes, plusieurs projets d'aérobot sont étudiés, mais aucun ne débouche sur un développement. À la fin de la décennie 2010, les progrès effectués dans la production et le stockage d'énergie ainsi que dans le domaine de la robotique permettent de concevoir des engins suffisamment légers et autonomes pour se déplacer sans être directement contrôlés par un opérateur humain. L'agence spatiale américaine, la NASA, lance le développement de plusieurs missions incluant ou reposant sur un aérobot. Le premier engin de ce type est l'hélicoptère Ingenuity, prototype dépourvu d'instruments, envoyé à la surface de Mars dans le cadre de la mission Mars 2020 pour valider le concept dans l'atmosphère particulièrement ténue de cette planète. La mission Dragonfly, qui doit étudier Titan, satellite de Saturne, à compter de 2034, est entièrement prise en charge par un aérobot lourd. Enfin, la mission de retour d'échantillons martiens de la NASA et de l'Agence spatiale européenne doit embarquer deux hélicoptères qui auront pour mission de récupérer les tubes d'échantillons de sol martien en cas de défaillance de l'astromobile Perseverance.
Généralités
Types d'aérobots
Un aérobot est une catégorie d'engin spatial qui utilise pour se déplacer la portance produite par l' atmosphère de la planète ou du satellite naturel qu'il étudie. Ce peut être un ballon ou un aérodyne à voilure fixe (planeur ou avion) ou à voilure tournante (hélicoptère comportant un ou plusieurs rotors).
Ballons
Le recours à un ballon pour explorer une autre planète présente de nombreux avantages. Le poids d'un ballon et son coût sont faibles. Le ballon peut parcourir de grandes étendues de terrain et son altitude de vol permet d'obtenir beaucoup plus de détails qu'à partir d'un satellite. Dans le cadre de missions d'exploration, le fait de ne pas pouvoir les diriger constitue généralement une contrainte mineure. Un ballon conçu pour l'exploration planétaire transporte une petite nacelle contenant les instruments de mesure, la source d'énergie, les systèmes de contrôle et de communication. Pour des considérations de poids, l'équipement de communication sera de faible puissance pour économiser l'énergie et une sonde spatiale orbitant en altitude servira de relais. Le recherche sur les ballons utilisés pour l'exploration planétaire a donné naissance à quelques concepts originaux.
La montgolfière infrarouge solaire est un ballon à air chaud dont l'enveloppe est faite d'un matériau qui capture la lumière du soleil ou la lumière réfléchie par la surface d'une planète. Le noir est la meilleure couleur pour absorber la chaleur, mais d'autres facteurs font que l'enveloppe peut être de couleur différente. Les montgolfières solaires présentent plusieurs avantages pour l'exploration planétaire : elles sont plus faciles à mettre en œuvre qu'un ballon à gaz, ne nécessitent pas obligatoirement une réserve de gaz pour le gonflage et peuvent supporter de petites fuites. En revanche, elles présentent l'inconvénient de ne pouvoir être utilisées que de jour. Une montgolfière solaire se pose la nuit et est équipée d'une corde de guidage attachée à la nacelle qui s'enroulera sur le sol et ancrera le ballon pendant la nuit. La corde doit être faite de matériau à très faible coefficient de friction pour éviter qu'elle ne se bloque au sol.
À la place du système nacelle et corde de guidage, le ballon peut emporter une sorte de « serpent » plus épais qui, à lui seul, remplace ces deux éléments. Cette configuration est intéressante pour faire des mesures de surface directes. On peut aussi ancrer le ballon à un endroit précis pour effectuer des observations atmosphériques.
L'autre concept est celui d'un ballon à « fluide réversible ». Ce ballon consiste en une enveloppe reliée à un réservoir contenant un fluide facile à vaporiser. Ainsi le ballon monte lorsque le fluide se vaporise et descendre lorsque le gaz se recondense en liquide. Il y a plusieurs façons de réaliser ce système, qui toutes relèvent de ce principe.
L'aspect le plus compliqué de l'usage des ballons dans l'exploration planétaire est la mise en œuvre. Généralement le ballon pénètre l'atmosphère de la planète enfermé dans une coque protégée par un bouclier thermique en forme de cône. Après son entrée dans l'atmosphère, un parachute va extraire le ballon de sa coque qui tombera plus loin. Le ballon va alors se déployer et se gonfler. Une fois qu'il est opérationnel, l'aérobot remplira sa mission de façon très autonome recevant uniquement quelques ordres généraux de la Terre. L'aérobot doit savoir naviguer dans les trois dimensions, recueillir et mémoriser des données scientifiques, contrôler son propre vol en faisant varier son altitude et même se poser dans des endroits précis pour opérer des observations rapprochées.
Aérodynes à voilure fixe (avion ou planeur)
Le recours à un aérodyne à voilure fixe (avion) a été étudié pour l'exploration de l'atmosphère de Mars[1] - [2], de Vénus[3] et de Jupiter[4].
Aérodynes à voilure tournante (hélicoptère)
Un aérodyne à voilure tournante (hélicoptère) est un engin qui présente l'avantage d'être à la fois très manœuvrant et de pouvoir se poser sur pratiquement n'importe quel terrain. La sustentation est obtenue par le ou les rotors en rotation. Pour tenir dans l'air, l'hélicoptère doit générer un flux d'air dont la poussée contrebalance la gravité de l'astre. Ce peut être obtenu par un rotor à grand diamètre tournant à une vitesse relativement lente ou par un rotor tournant à très grande vitesse (comme les rotors de turbines de réacteur). La deuxième solution nécessite beaucoup plus d'énergie pour produire la même poussée[5].
Planètes et satellites éligibles
Pour pouvoir être mis en œuvre, la planète ou le satellite naturel exploré par l'aérobot doit être pourvu d'une atmosphère suffisamment dense, ce qui exclut des corps célestes comme Mercure ou la Lune. La densité de l'atmosphère, la gravité, la température, la vitesse du vent et l'intensité lumineuse (source d'énergie) jouent un rôle particulièrement important dans la conception et les capacités d'un aérobot[6] :
- la densité de l'atmosphère a un impact direct sur la portance. Cette force joue de manière importante sur la masse de l'aérobot lorsque celui-ci est un aérodyne à voilure fixe ou tournante et de manière moins importante lorsque celui-ci est un ballon (volume du ballon) ;
- la gravité du corps céleste joue également sur la masse de l'aérobot. Une gravité importante nécessite une portance plus importante ;
- le flux solaire impacte la capacité de production d'énergie si celle-ci est fournie par des cellules solaires. Un aérodyne à voilure fixe ou tournante a besoin d'une quantité importante d'énergie pour se déplacer ;
- une température peu élevée impose de consacrer une partie de l'énergie de l'aérobot à la préservation des organes les plus fragiles au détriment de la propulsion dans le cas d'un aérodyne à voilure fixe ou tournante ;
- la vitesse du vent (modulo la densité de l'atmosphère) impacte la capacité à contrôler la trajectoire de l'aérobot.
Les caractéristiques des principales destinations de l'exploration du système solaire (Mars, Vénus, Titan) sont résumées dans le tableau ci-dessous.
| Caractéristique | Vénus | Mars | Titan | Terre |
|---|---|---|---|---|
| Gravité (g) | 0,9 | 0,37 | 0,14 | 1 |
| Pression atmosphérique en surface (bar) | 92 | 0,0067 | 1,5 | 1 |
| Densité de l'air en surface (kg/m-3 | 64 | 0,015 | 5,4 | 1,2 |
| Flux solaire en surface (Watt/m2) | 5 | 700 | 1 | 600 |
| Température en surface (kelvin) | 735 | 230 | 94 | 290 |
| Variation de température diurne en surface (ΔT/T) | < 0,3 | 30 à 50 | < 1 | < 10 |
| Vitesse du vent à basse altitude (km/s) | 1 à 3 | 5 à 20 | 1 | 5 à 20 |
| Principal gaz de l'atmosphère | Dioxyde de carbone | Azote | ||
| Caractéristiques de la troposphère | ||||
| Altitude de la troposphère (km) | 65 | 11 | 40 | 17 |
| Pression de la troposphère (mbar) | 97 | 2,7 | 200 | 90 |
| Température dans la troposphère (kelvin) | 735 | 230 | 94 | 290 |
| Vitesse du vent dans la troposphère (km/s) | 80 à 100 | 20 à 30 | 15 | 20 à 30 |
Historique
L'exploration du Système solaire à l'aide de robots débute à la fin des années 1950. Commencée modestement, par des engins légers uniquement capables de survoler le corps céleste visé, elle s'est rapidement sophistiquée avec la mise au point en une quinzaine d'années d'engins capables de se placer en orbite (orbiteurs), puis de se poser (atterrisseurs) sur la surface, et enfin de se déplacer sur le sol (astromobiles ou rovers). La capacité d'exploration de ces astromobiles est toutefois restée limitée, notamment du fait de leur vitesse réduite et de la nécessité de déposer ceux-ci sur un terrain relativement plat. Les ingénieurs ont donc étudié l'envoi de robots capables de flotter, planer ou voler dans l'atmosphère : ces aérobots présentent l'avantage d'étendre la portée de l'exploration des planètes ou des lunes lorsque celles-ci sont dotées d'atmosphère (Vénus, Mars, Jupiter, Saturne, Titan, Uranus et Neptune). Vénus, qui dispose d'une atmosphère dense, est la première destination d'un aérobot et reste la seule jusqu'en 2021 : en 1985, un ballon équipé d'instruments scientifiques est largué par la sonde spatiale soviétique Vega et étudie avec succès l'atmosphère de la planète[8]. La planète Mars, cible privilégiée de l'exploration spatiale, est une destination compliquée pour ce type d'engin. Son atmosphère très ténue (seulement 1 % de la pression atmosphérique présente sur Terre) ne permet de produire qu'une portance très faible et la mise au point d'un aérobot est beaucoup plus difficile (pour flotter dans l'atmosphère de Mars, un ballon doit être 150 fois plus volumineux que son équivalent largué à 50 kilomètres d'altitude dans l'atmosphère de Vénus). Plusieurs projets martiens de planeurs ou d'avions propulsés sont étudiés et proposés à la NASA, sans qu'aucun ne soit retenu[9].
Exploration de Mars avec des aérobots
Aérobot de type aéronef
Faire voler un engin dans l'atmosphère de Mars nécessite de résoudre les difficultés suivantes[2] :
- la compréhension et la modélisation du faible nombre de Reynolds dans le cadre de l'aérodynamique à grande vitesse subsonique ;
- le dessin et la construction de cellules non conventionnelles et d'aérostructures ;
- le matriçage de la dynamique du déploiement du parachute de freinage au début de la descente du véhicule ;
- l'intégration dans le système d'un sous–système de propulsion sans air.
Un hélicoptère martien est handicapé par la faible densité de l'atmosphère de cette planète. En effet, la puissance requise pour sustenter l'engin (W) est définie de la manière suivante :

où :
- est la portance du rotor (N) ;
- est la superficie du disque rotor () ;
- est la masse volumique de l'atmosphère martienne ().





En vol stabilisé, la portance est égale en module et opposée au poids de l'engin, où est sa masse et la gravité sur Mars. La puissance requise est donc proportionnelle à la puissance 3/2 de la masse à sustenter, et inversement proportionnelle à la puissance 1/2 de la masse volumique de l'atmosphère. La pression atmosphérique martienne est environ 100 fois plus faible que la pression terrestre. Par contre, l'atmosphère martienne étant essentiellement constituée de gaz carbonique, sa masse volumique est 50% plus élevée dans les mêmes conditions de température et de pression. En tablant sur la valeur moyenne de pression de 600 Pa, on peut estimer que la masse volumique atmosphérique est 100 fois plus faible sur Mars que sur Terre au niveau du sol.



A contrario, la gravité martienne vaut 38 % de celle de la Terre, ce qui aide la sustentation.
Le rapport est, pour une même superficie du disque rotor, 2,34 fois plus élevé sur Mars que sur Terre ( = 2,34).


Pour limiter la puissance nécessaire au vol sur Mars et donc préserver une autonomie satisfaisante, une superficie du disque rotor plus élevée que celle d'un hélicoptère terrestre de masse équivalente est nécessaire.
Une difficulté supplémentaire est liée à la vitesse du son plus faible sur Mars (240 m/s contre 340 m/s sur Terre). Cela oblige à diminuer la vitesse de rotation du rotor dans les mêmes proportions, ce qui n'est favorable ni au bilan de masse, ni au rendement du moteur électrique s'il n'est pas équipé d'un train d'engrenages pour réduire la vitesse du rotor par rapport à celle du moteur.
Projet de ballon martien par le CNES
Après le succès rencontré par les ballons au cours du programme Vega en direction de Vénus, Jacques Blamont se consacre à une mission plus ambitieuse vers Mars. Le ballon sera embarqué par une sonde spatiale soviétique.
La pression atmosphérique sur Mars est environ 150 fois moindre que sur Terre. Dans une atmosphère aussi ténue, un ballon avec un volume de 5 000 à 10 000 m3 ne pourrait emporter une charge utile[10] que de 20 kg ; il faut envisager un ballon de 100 000 m3 pour enlever 200 kg. Blamont a déjà conduit de nombreuses expériences sur les montgolfières solaires avec plus de 30 vols à son actif entre la fin des années 1970 et le début des années 1990. Les montgolfières ont volé à une altitude de 35 km où l'atmosphère est aussi froide et raréfiée que sur Mars et l'une d'entre elles a passé 69 jours en l'air en bouclant deux fois le tour de la Terre. Les premières études de ballons pour Mars envisagent un système à « double ballon » avec un ballon étanche rempli à l'hydrogène ou à l'hélium, attaché à une montgolfière solaire. Le ballon à gaz léger est destiné à garder la montgolfière en vol durant la nuit. Au cours de la journée, la chaleur du soleil fait chauffer la montgolfière et l'ensemble du système prend de l'altitude. Finalement les chercheurs optent pour un ballon à hélium cylindrique en film de PET aluminisé et d'un volume de 5 500 m3. Le ballon devrait prendre de l'altitude dans la chaleur de la journée, et redescendre avec la fraîcheur de la nuit.
La masse totale du ballon est de 65 kg, comprenant une nacelle de 15 kg et une corde de guidage supportant l'instrumentation de 13,5 kg. Le ballon devrait pouvoir être opérationnel pendant 10 jours. Malheureusement, malgré les études considérables qui ont été faites sur le ballon et les systèmes environnants, les Russes, à cause de difficultés financières, repoussent l'envoi de la sonde Mars 96 de 1992 à 1994, puis à 1996. Toujours pour des raisons de coût le ballon n'a finalement pas fait partie du projet et, enfin, la sonde a été perdue au moment du lancement en 1996.
Études de ballon martien par la NASA
À la même époque, le Jet Propulsion Laboratory (JPL) de la NASA étudie des aérobots planétaires. Les premières de ces expériences étaient centrées sur une série de ballons à fluide réversible dans le cadre du projet Alice (Altitude Control Experiment, « expérimentation de contrôle en altitude »). Le premier ballon, Alice 1, a pris son vol en 1993, suivi par d'autres jusqu'à Alice 8 en 1997. Des travaux connexes ont porté sur la caractérisation de matériaux pour l'enveloppe d'un ballon pour Vénus et sur deux vols de ballon en 1996 pour tester les instrumentations embarquées.
En 1996, le JPL travaille sur une série d'expériences qualifiantes nommée PAT (Planetary Aerobot Testbed[11], « banc d'essai pour aérobot planétaire »), qui cherche à démontrer les capacités des aérobots planétaires à l'aide de vols dans l'atmosphère terrestre. Le banc d'essai prévoit un ballon à fluide réversible emportant une charge utile de 10 kg comportant le système de navigation et une caméra, et qui pourrait être rendu autonome par la suite. Le projet, jugé trop ambitieux, est abandonné en 1997.
Le JPL continue de travailler sur des expérimentations à moindre coût, très pointues, destinées à la mise au point d'un aérobot pour la planète Mars. Le programme, lancé en , porte le nom de « Mabvap » (Mars Aerobot Validation Program, « programme de qualification d'un aérobot pour Mars ») et prévoit des largages de ballons à partir de montgolfières ou d'hélicoptères pour étudier la phase très délicate du déploiement[12]. Mabvap développe également des enveloppes de ballons en surpression dans des matériaux susceptibles de permettre des missions de longue durée sur Mars.
Le JPL a également fourni des ensembles de capteurs atmosphériques, ou destinés à la navigation pour les vols de ballons avec pilote Solo Spirit round-the-world. Cette action visait à la fois à soutenir les missions en ballon et à optimiser la technique des aérobots planétaires.
Des expérimentations sur la technologie Mabvap du JPL sont menées en prévision d'une mission d'aérobot réelle (baptisée Mabtex, pour Mars Aerobot Technology Experiment, « expérimentation de la technique des aérobots pour Mars »). Mabtex est essentiellement conçue pour tester la technologie de façon opérationnelle en prévision de missions plus ambitieuses. Il s'agit d'envisager un petit ballon à surpression emporté par une mini–sonde ne pesant guère plus de 40 kg. Le ballon lui-même ne doit pas peser plus de 10 kg et doit rester opérationnel pendant une semaine. La nacelle doit contenir les systèmes de contrôle et de navigation ainsi qu'un système de prise de vue stéréoscopique, un spectromètre et un magnétomètre.
Les projets suivants envisagent une suite au Mabtex sous la forme d'un aérobot beaucoup plus sophistiqué appelé MGA (Mars Geoscience Aerobot, « Aérobot pour l'étude géophysique de Mars »). Les plans prévoient un ballon à surpression proche de celui de Mabtex mais beaucoup plus gros. MGA devrait transporter une charge utile dix fois plus importante que celle de Mabtex et être capable de rester en l'air trois mois en accomplissant 25 révolutions autour de Mars et en parcourant 500 000 km. La charge est composée d'éléments sophistiqués comme un système imageur stéréoscopique à ultra haute résolution doté de la possibilité de former des images en oblique, un sondeur radar pour détecter la présence d'eau sous la surface et un système de spectroscopie infrarouge pour caractériser les minéraux, un magnétomètre et des instruments météorologiques ou atmosphériques. Le Mabtex, pour sa part, doit donner naissance à un petit dirigeable de reconnaissance à énergie solaire nommé Masepa (Mars Solar Electric Propelled Aerobot, « aérobot martien à propulsion électrique »).
Pendant que ces essais et ces expérimentations avaient lieu, le JPL élaborait quelques projets de mission pour aérobots à destination de Mars, Vénus, Saturne, Titan et les planètes externes.
Projet ARES

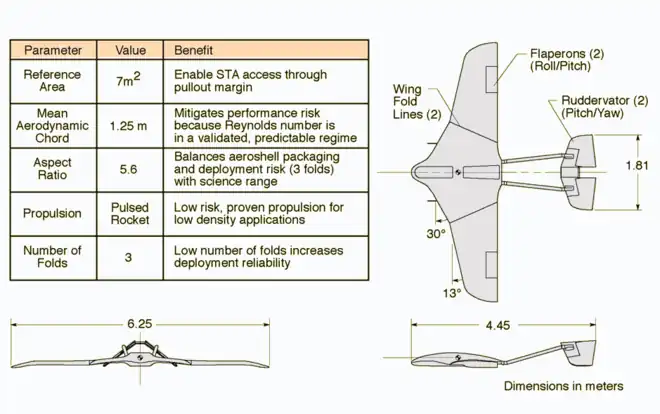
ARES est un projet d'avion propulsé pour l'exploration de Mars. Figurant en 2007 parmi les quatre finalistes pour le programme Mars Scout, sa candidature est écartée au profit de la mission mission Phoenix. ARES est un avion d'environ 125 kilogrammes (masse à sec de 66,5 kg) et d'une envergure de 6,2 mètres. Circulant à une altitude de 1 500 mètres durant environ une heure et demie (distance parcourue environ 850 kilomètres), il devait recueillir des données sur le champ magnétique et l'atmosphère de Mars à basse altitude. ARES devait emporter un magnétomètre, un spectromètre de masse, un spectromètre à neutrons, un détecteur de radiations ionisantes, une station météorologique et plusieurs caméras. L'avion, propulsé par un moteur-fusée, devait suivre de manière autonome une trajectoire pré-planifiée. Au cours de sa phase de conception, des maquettes de l'aéronef aux échelles 1/2 et 1 ont été expérimentés dans les conditions de l'atmosphère de Mars[13] - [14].
Plusieurs types de propulsion ont été étudiés pour l'avion ARES : d'une part le recours à une hélice, mise en mouvement soit par des moteurs électriques alimentés par des batteries ou des piles à combustible, soit par des moteurs à combustion interne, d'autre part des moteurs-fusées à ergols liquides soit monoergols soit biergols. Deux critères ont été utilisés pour évaluer ces différents systèmes : la capacité à effectuer un vol de 480 kilomètres et la maturité de la technologie dans le contexte martien (c'est-à-dire le degré de risque). La masse allouée au système propulsif (combustible et moteurs) était de 63 kilogrammes[15].
| Type de propulsion | Sous-catégorie | Masse à sec | Ergols | Autonomie (heures de vol) | Distance parcourue | Maturité technique |
|---|---|---|---|---|---|---|
| Moteurs à hélice | ||||||
| Propulsion électrique | Pile à combustible | 48 kg | 15 kg | 3 heures | 1512 km | Faible (TRL 4-5) |
| Batteries classiques | 63 kg | 0 kg | 0,4 heure | 202 km | Moyenne (TRL 4-6) | |
| Moteur à combustion interne | Piston Expander Engine | 19 kg | 44 kg | 2 heures | 1008 km | Faible (TRL 4-5) |
| Moteur à quatre temps | 21 kg | 42 kg | 4,1 heures | 2066 km | Faible (TRL 4-5) | |
| Moteurs-fusées | ||||||
| Moteur-fusées à ergols liquides | Bi-ergols | 15 kg | 48 kg | 1,2 heures | 605 km | Elevée (TRL 7-9) |
| Monoergol | 11 kg | 52 kg | 0,9 heures | 454 km | Elevée (TRL 7-9) | |
Dans l'environnement martien peu dense, le comportement d'une hélice, problématique, nécessitait des recherches approfondies que ne permettaient pas le budget alloué à une mission de type Mars Scout. Par ailleurs l'hélice, pour tenir dans le volume du bouclier thermique, devait être stockée en position repliée ajoutant un risque au moment déploiement. Le choix de moteurs-fusées biergols s'est donc imposé, le monoergol ne permettant pas d'atteindre les performances attendues. Pour réduire à la fois les risques, le cout et tenir le planning, l'avion ARES utilise trois petits moteurs-fusées développés par AMPA déjà utilisé à des milliers d'exemplaires. Brûlant un mélange de méthylhydrazine et de MON-3, chaque moteur à une poussée de 22 newtons de poussée et une impulsion spécifique de 293 secondes. Les ergols sont mis sous pression par de l'hélium. L'hélium et les deux ergols sont stockés dans des réservoirs situés près du centre de masse de l'avion[15].
Futurs projets d'hélicoptères martiens lourds (décennie 2020)
Sans attendre la fin des tests d'Ingenuity sur la planète Mars, la NASA a commencé à étudier une deuxième génération d'hélicoptère, capable cette fois de remplir une mission scientifique sur la planète, ayant une portée de deux kilomètres entre deux recharges de ses batteries et un temps de vol maximal de quatre minutes. La principale contrainte est le volume nécessaire pour stocker les pales des rotors. Selon une étude de la NASA publiée début 2020, le véhicule de descente des missions martiennes existantes de type Pathfinder utilisé par les astromobiles MER comme Sojourner (atterrisseur de 2,5 m de diamètre intérieur) pourrait transporter un hélicoptère d'une vingtaine de kilogrammes de type hexacoptère (six rotors) capable d'emporter une charge utile (instruments scientifiques, caméras) de deux à trois kilogrammes. Le volume disponible dans l'étage de descente permettrait d'embarquer des équipements supplémentaires comme un système de télécommunications, des instruments scientifiques, etc[16].
Prototype Ingenuity de la mission Mars 2020 (2021)
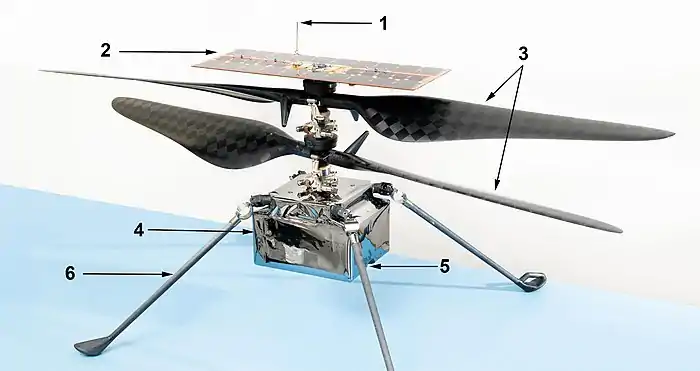
Les études d'aérobots plus lourds que l'air menés au Jet Propulsion Laboratory dans les années 2010 débouchent en 2018 sur le développement d'un projet concret. Ingenuity est un petit hélicoptère expérimental d'un peu moins de deux kilogrammes développé par le JPL qui doit être testé sur le sol de la planète Mars au cours de la mission Mars 2020 lancée le à bord d'une fusée Atlas V. L'engin, fixé au châssis de l'astromobile Perseverance, est libéré une fois celui-ci arrivé sur le sol martien. Pour la première fois dans l'histoire de l'ère spatiale, un engin plus lourd que l'air effectue un vol sur une autre planète. L'objectif est de tester les capacités d'un tel appareil dans le domaine de la reconnaissance optique du terrain dans cet environnement caractérisé par une atmosphère très ténue limitant la portance et des délais de communication qui interdisent tout contrôle direct du vol par un opérateur humain[17] - [18].
Architecture de l'aérobot
Le choix de la formule hélicoptère par opposition à celle du quadrirotor s'explique par la masse importante du rotor liée à sa grande taille pour les raisons vues plus haut. La stabilisation d'un quadrirotor est effectuée en agissant sur la vitesse de rotation des rotors, mais la vitesse de modulation est fonction de leur inertie, donc de leur masse. Dans le contexte martien, la stabilisation d'un quadrirotor devient problématique comme sur Terre à haute altitude. L'utilisation de rotors contrarotatifs coaxiaux permet de gagner en encombrement par rapport au recours à un rotor anticouple[19].
Pour parvenir à faire voler l'hélicoptère dans l'atmosphère de Mars, il fallait concevoir un engin suffisamment léger, ce qui n'a été rendu possible que grâce aux avancées réalisées dans le domaine des accumulateurs (liées au développement des téléphones portables), des cellules photovoltaïques (à rendement plus élevé), des systèmes inertiels et des ordinateurs embarqués[20]. Ainsi, il est conçu pour que sa masse ne dépasse pas 1,8 kg[21] - [20] (soit un poids de 6,69 newtons sur le sol martien).
La phase la plus délicate du vol de l'hélicoptère est l'atterrissage, du fait des turbulences qui peuvent déséquilibrer l'engin. La solution retenue est d'arrêter la propulsion à un mètre au-dessus du sol et de laisser l'hélicoptère atteindre le sol en chute libre. La vitesse verticale à l'atterrissage est en conséquence de plus d'1 m s−1. Le train d’atterrissage est conçu pour encaisser cette vitesse sur un sol qui peut présenter une pente importante[22].
Première utilisation opérationnelle sur Mars : la mission Mars Sample Return (vers 2028)

La mission Mars Sample Return, développée par la NASA en collaboration avec l'Agence spatiale européenne, a pour objectif de ramener sur Terre les échantillons de sol martien prélevés par l'astromobile Perseverance. Pour remplir cet objectif, la mission prévoit d'envoyer un atterrisseur, Sample Retrieval Lander (SRL), emportant un bras téléopéré. Si ces derniers se trouvent hors de portée de l'atterrisseur à la suite d'une panne de Perseverance, SRL dispose de deux hélicoptères Sample Recovery Helicopter équipés d'une pince[23].
Les deux hélicoptères Sample Recovery Helicopter sont directement inspirés de l'hélicoptère Ingenuity utilisé de manière expérimentale à partir de 2021 sur le sol martien dans le cadre de la mission Mars 2020 / Perseverance, dont ils reprennent l'architecture et la taille. Disposant d'un rotor de 1,2 mètres de diamètre et hauts de 52 centimètres, ils ont une masse de 2,26 kilogrammes (poids équivalent à 0,86 kilogrammes sur Mars). Ils se distinguent de Ingenuity par leur train d'atterrissage (les quatre pieds sont remplacés par des roues de dix centimètres de diamètre et de deux centimètres de large), qui leur permet de se déplacer sur le sol pour effectuer des déplacements courts, et par la présence d'une pince articulée, qui doit être utilisée pour saisir les tubes d'échantillons. Leur vitesse horizontale maximale est de cinq mètres par seconde (environ 18 km/h), leur rayon d'action est de 700 mètres et leur altitude maximale est de 20 mètres. L'énergie est fournie par des panneaux solaires qui chargent des accumulateurs lithium-ion[24].
Exploration de Vénus par des aérobots
Caractéristiques environnementales de Vénus
L'atmosphère de Vénus, très épaisse, a des caractéristiques extrêmes. Près du sol, la pression atmosphérique et la température limitent la durée de vie des engins spatiaux à quelques heures. Par contre, la troposphère de Vénus présente des caractéristiques très proches de celles de la Terre et donc favorables à la mise en œuvre de ballons[25].
Ballons du programme Véga (1985)

La première mission planétaire en ballon — et en 2023 la seule — a été menée en 1985 par l'Institut pour la recherche spatiale (IKI) de l'Académie des sciences de l'URSS avec une participation indirecte du Centre national d’études spatiales français (CNES). Un petit ballon, très semblable en apparence aux ballons–sondes météorologiques terrestres, était embarqué dans chacune des sondes spatiales soviétiques du programme Vega lancées en 1984. L'idée en revient à l'origine à Jacques Blamont, à l'époque directeur scientifique et technique du CNES, qui la propose en 1967 aux soviétiques dans le cadre de la coopération franco-soviétique dans le domaine spatial. Le projet consistait à développer une flottille de petits ballons. Mais les responsables soviétiques décident en 1972 de développer une mission, baptisée Eos-Vénus, emportant un ballon unique de grande taille (nacelle de 165 kg). Le projet, auquel la France collabore, est finalement abandonné par les soviétiques en 1980 au profit du développement de deux petits ballons qui doivent être déployés au cours des deux missions du programme Vega qui seront lancées en 1984. Le CNES se retire du projet, mais participe à la fourniture des batteries au lithium et du néphélomètre en servant d'intermédiaire entre les fournisseurs américains et les soviétiques (à cette époque de la guerre froide, les Américains n'ont théoriquement pas le droit d'exporter ce type d'équipement vers l'Union soviétique)[26].
Le ballon emporté par les missions Vega est à pression constante. D'un diamètre de 3,4 mètres et de forme sphérique, il est rempli d'hélium. Les équipements et les instruments sont contenus dans une nacelle pesant 6,9 kg et mesurant 1,3 mètre de long pour un diamètre de 20 centimètres. Celle-ci est suspendue sous le ballon au bout d'un câble de 13 mètres de long. L'énergie est fournie par des batteries au lithium dont la capacité détermine la durée de vie de la mission (environ 60 heures). La masse totale du ballon et de la nacelle est de 21,74 kilogrammes. Avant son largage sa masse est de 123 kilogrammes en incluant le parachute utilisé par son déploiement, le système de gonflage du ballon, un ballast, etc.Les instruments scientifiques permettent de mesurer la température, la pression atmosphérique et la vitesse verticale du vent, la rétrodiffusion de la lumière par les aérosols. Toutes les 30 minutes, une quantité très modeste de mesures (852 bits de données) étaient transmises vers la Terre[27] - [28].
Les ballons ont été déployés à une altitude de 54 km dans la partie la plus active de l'atmosphère de Vénus. Le premier ballon est entré dans l'atmosphère de Vénus le 11 juin 1985, suivi du second ballon le 15 juin. Le premier ballon est tombé en panne après 56 minutes, mais le second est resté opérationnel un peu moins de deux jours terrestres jusqu'à ce que ses batteries soient épuisées. Les deux ballons de Vega 1 et Vega 2 purent transmettre des données durant 46 heures[27] - [28]. Les résultats scientifiques de la sonde Véga compte tenu de la faible capacité d'emport sont modestes. Les principaux résultats sont la mesure des vents zonaux et verticaux. Mais ce qui était considéré par les soviétiques avant tout comme un démontrasteur technologique, a permis de valider l'apport des ballons pour l'exploration planétaire[26].
Venus Geoscience Aerobot
De la même façon, le JPL a également étudié des aérobots à destination de Vénus. Le Vebtex (Venus Aerobot Technology Experiment, « expérimentation de la technique des aérobots pour Vénus ») était destiné à valider la technologie de l'aérobot, mais, en réalité, s'est transformé en missions à caractère plus opérationnel. Une des missions, la Vams (Venus Aerobot Multisonde, « aérobot vénusien multisonde »), envisageait un aérobot pour opérer à une altitude supérieure à 50 km et qui devait larguer des sondes de surface sur différentes cibles précises. Le ballon servait alors de relais pour les communications depuis les sondes vers la Terre et à collecter des données sur le champ magnétique de la planète, entre autres informations. Le Vams ne mettait pas en jeu des technologies vraiment nouvelles, mais devait convenir à la politique de faible coût du programme Discovery de la Nasa.
Un travail important a été fait sur un projet plus ambitieux, le VGA (Venus Geoscience Aerobot, « Aérobot pour l'étude géophysique de Vénus »). Le programme VGA prévoit un ballon à fluide réversible relativement important empli d'hélium et d'eau qui pourrait descendre à la surface de Vénus pour récolter des échantillons de sol puis remonter à haute altitude pour refroidir.
Pour développer un aérobot susceptible de résister à la fois aux hautes pressions et aux hautes températures (près de 480 °C) à la surface de Vénus, ainsi qu'à la traversée de nuages d'acide sulfurique, il faut mettre en œuvre des technologies nouvelles. Dans ces conditions, VGA ne pourra être opérationnel qu'à la fin de la décennie 2030. Un prototype d'enveloppe de ballon a été fabriqué en Zylon (polybenzoxazole), un polymère qui présente une grande résistance mécanique et à la chaleur et dont la porosité est très faible pour les gaz légers. On ajoute un revêtement d'or pour permettre au ballon de résister à la traversée des nuages acides.
La nacelle proposée pour la mission VGA devait peser environ 30 kg. Dans cette configuration, la plupart des instruments sont enfermés dans un récipient résistant à la pression, de forme sphérique, formé d'une coque externe en titane et d'une coque interne en acier inoxydable. La sphère contient une caméra à semiconducteurs et divers instruments ainsi que les systèmes de communication et de contrôle. Elle est prévue pour résister à des pressions jusqu'à 100 atmosphères et pour maintenir la température interne en–deçà de 30 °C, même à la surface de Vénus. La sphère est fixée à l'arrière d'une sorte de panier hexagonal formé de panneaux solaires qui eux-mêmes sont attachés au ballon situé au-dessus. La sphère est entourée d'un anneau de tuyaux qui servent aux échanges de chaleur. Une antenne de radiocommunication en bande S est installée au bord du groupement d'antennes et une antenne pour le radar destiné aux études de la surface se déploie sur un mât.
Venus In Situ Explorer
Le composant principal de la mission VISE proposée à plusieurs reprises pour le programme New Frontiers de la NASA devait se poser sur le sol de Vénus pour en étudier les caractéristiques. Elle comportait également un petit ballon largué en altitude pour étudier l'atmosphère.
Exploration de Titan

Caractéristiques environnementales de Titan
Titan, le plus gros satellite de Saturne, est un cas intéressant pour l'exploration à l'aide d'un aérobot. Son atmosphère est beaucoup plus dense (4,4 fois) et plus froide que celle de la Terre. Elle est composée à 95 % d'azote, ce qui abaisse sa viscosité. En conséquence, le nombre de Reynolds de l'aérodyne Dragonfly sur Titan est plusieurs fois plus élevé que s'il volait sur Terre. Le profil des pales des rotors est adapté pour optimiser son efficacité et il est proche de celui adopté par les pales des éoliennes terrestres, ce qui présente l'avantage d'accroitre sa robustesse. Dans l'atmosphère de Titan, la vitesse du son est de 194 m/s, contre 340 m/s sur Terre, ce qui limite à la fois la vitesse de rotation des rotors et la longueur des pales. En pratique, cette contrainte a un impact réduit sur les performances de l'aéronef. Compte tenu de ces caractéristiques, Dragonfly (d'une masse d'environ 450 kg) pourra atteindre une vitesse maximale en vol de 10 m/s (36 km/h). Pour un vol sur une distance d'environ 40 km, la consommation électrique serait d'environ 2 kWh. Une batterie d'environ 30 kg, ayant une densité énergétique de 100 Wh/kg, permettrait donc de franchir 60 km. L'énergie nécessaire pour un vol ne croît pas de manière linéaire par rapport à la masse de l'aéronef, mais en portant cette valeur à la puissance 1,5, ce qui constitue une des caractéristiques limitant la masse de Dragonfly. Malgré la vitesse maximale modeste envisagée, les concepteurs de l'aéronef ont soigné son aérodynamisme, qui constitue un facteur de consommation électrique significatif dans l'atmosphère épaisse de Titan. Pour limiter les forces de traînée, la face avant de l'aéronef présente une forme aérodynamique, un carénage enveloppe les foreuses fixées sur les patins et l'antenne parabolique est repliée à plat pont en vol. L'aéronef pourra être utilisé pour réaliser des sondages verticaux de la basse atmosphère jusqu'à une altitude d'environ 4 km. Le mode de propulsion permet une ascension verticale mais interdit une descente verticale. Le modèle de circulation atmosphérique de Titan établi à l'aide des données recueillies par la sonde spatiale Cassini prédit des vents dont la vitesse atteint au maximum de 1 à 2 m/s. Ceux-ci ne devraient donc avoir qu'un impact mineur sur la distance franchissable par Dragonfly[29].
Études de la NASA
Un des concepts, nommé Titan Aerobot Multisite, met en œuvre un ballon à fluide réversible rempli d'argon, qui pourrait descendre d'une altitude élevée à la surface de Titan, faire des mesures, puis remonter à haute altitude pour faire d'autres mesures et se déplacer ensuite vers un nouveau site. Un autre concept, la mission Titan Aerobot Singlesite, utiliserait un ballon à surpression qui serait dirigé vers un seul site, lâcherait une grosse partie de son gaz, puis étudierait le site en détail.
Une variante de ce système, le Titan Aerover, combinerait aérobot et véhicule terrestre. Ce véhicule formerait un triangle sur lequel seraient fixés trois ballons, chacun d'environ deux mètres de diamètre. Après avoir pénétré l'atmosphère de Titan, l'aerover volerait jusqu'à ce qu'il trouve un site intéressant à étudier, puis lâchant de l'hélium il pourrait descendre sur la surface. Le JPL a construit un prototype rudimentaire qui ressemble à trois ballons de plage sur une structure tubulaire.
Quelle que soit la forme que prendra la mission Titan Biologic Explorer, le système nécessitera vraisemblablement un générateur thermoélectrique à radioisotope comme source d'énergie. L'énergie solaire n'est pas envisageable à cette distance du soleil et sous le « smog » de Titan. L'aérobot embarquera aussi un mini laboratoire de chimie pour rechercher des composés organiques complexes.
Mission Dragonfly (2027)

En décembre 2017, un aérobot est l'un des deux finalistes retenus pour la quatrième mission du programme New Frontiers, qui regroupe des projets d'exploration du système solaire de la NASA au coût plafonné à un milliard de dollars. Dragonfly est un aérogire à huit rotors qui doit effectuer de multiples vols de courte durée pour étudier la basse atmosphère et la surface de Titan. Sa masse est de plusieurs centaines de kilogrammes et son énergie est fournie par un générateur thermoélectrique à radioisotope multi-mission (MMRTG) fournissant environ 100 watts. Il emporte quatre suites instrumentales, dont deux spectromètres de masse, plusieurs caméras et un ensemble de capteurs météorologiques. La sélection définitive de la mission, qui est en concurrence avec une mission de retour d'échantillon du sol d'une comète, doit intervenir en 2019[30] - [31].
Jupiter
Les aérobots pourraient être utilisés pour explorer l'atmosphère de Jupiter et certainement d'autres planètes externes gazeuses. Comme l'atmosphère de ces planètes est composée en grande partie de duhydrogène, gaz le plus léger qui soit, ce genre d'aérobot devra être de type montgolfière. Étant donné que la lumière du soleil est faible à cette distance, l'aérobot prendra l'essentiel de sa chaleur dans le rayonnement de la planète qu'il survole.
Sur Jupiter, un aérobot doit opérer à des altitudes où la pression de l'air est comprise entre une et dix atmosphères, en descendant parfois plus bas pour des observations plus précises. On pourrait obtenir ainsi des mesures atmosphériques, des images et des données sur les phénomènes météorologiques comme la Grande Tache rouge. Un aérobot en mission sur Jupiter doit également larguer des sondes dans l'atmosphère et relayer leurs données vers un orbiteur jusqu'à ce que les sondes soient détruites par la température et la pression.
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Aerobot » (voir la liste des auteurs).
- (en) David Portree, « Vue d'ensemble de l'avion pour Mars Altaïr VI en 1978 »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?).
- (en) L'avion pour Mars « AME », concept, NASA, 1996.
- (en) Geoffrey A. Landis, Anthony Colozza, et Christopher M. LaMarre, Atmospheric Flight on Venus, AIAA 40e rassemblement pour les sciences aérospaciales, American Institute of Aeronautics and Astronautics, Reno, Nevada, 14-17 janvier 2002.
- (en) George Maise, Exploration of Jovian Atmosphere Using Nuclear Ramjet Flyer, présenté à la 4e NIAC. Rassemblement annuel NIAC report.
- Planetary Landers and entry Probes, p. 68-69.
- Planetary Landers and entry Probes, p. 59-61.
- Planetary Landers and entry Probes, p. 60
- (en-GB) « Nasa to fly Ingenuity Mars helicopter in early April », BBC News, (lire en ligne, consulté le ).
- (en) Andrew J. Ball, James R.C. Garry, Ralph D. Lorenz et Viktor V. Kerzhanovichl, Planetary Landers and entry Probes, Cambridge University Press, (ISBN 978-0-521-12958-9), p. 56-61.
- La charge utile est la masse de la matière transportée ou la matière elle-même ; à opposer à la masse de l'avion, du bateau ou du camion avec son équipage, ne servant qu'à transporter cette charge utile.
- « NASA Technical Reports Server (NTRS) », sur ntrs.nasa.gov (consulté le ).
- V. Kerzhanovich, J. Cutts, A. Bachelder et J. Cameron, « Mars aerobot validation program », dans International Balloon Technology Conference, American Institute of Aeronautics and Astronautics, coll. « Balloon Systems Conferences », (DOI 10.2514/6.1999-3853, lire en ligne).
- (en) « Ares Mars Airplane », NASA (version du 25 mars 2010 sur Internet Archive).
- (en) J.S. Levine et équipe du projet ARES, « The Aerial Regional-scale Environmental Survey (ARES) Mission to Mars » [PDF], NASA, .
- (en) Christopher A. Kuhl, Design of a Mars Airplane Propulsion System for the Aerial Regional-Scale Environmental Survey (ARES) Mission Concept, , 38 p. (lire en ligne)Conception du système de propulsion de la mission ARES.
- (en) Withrow-Maser Shannah, Koning, Witold, Kuang, Winnie et Johnson, Wayne R, « Recent Efforts Enabling Martian Rotorcraft Missions », Papier de conférence, , p. 1-10 (lire en ligne).
- (en) J. (Bob) Balaram, Timothy Canham, Courtney Duncan et al. « Mars Helicopter Technology Demonstrator » (lire en ligne) [PDF]
—2018 AIAA Atmospheric Flight Mechanics Conference (Kissimmee, Floride, 8-12 janvier 2018). - (en) NASA, Ingenuity Mars Helicopter landing press kit, NASA, , 33 p. (lire en ligne [PDF]).
- (en) Gary M Ortiz, « NASA Chooses Helicopter for Mars Drone », sur UAS Vision, .
- (en) Stephen Clark, « Helicopter to accompany NASA’s next Mars rover to Red Planet », sur spaceflightnow.com, .
- (en) Tony Greicius, « NASA's Mars Helicopter Completes Flight Tests », sur NASA, (consulté le ).
- (en) Gary M Ortiz, « Mars 2020 Helicopter Landing Gear Dynamics » [PDF], sur Jet Propulsion Laboratory, .
- (en) « Spacecraft › Sample Retrieval Lander », sur Mars Sample Return Mission (NASA), NASA (consulté le ).
- (en) « Spacecraft › Sample Recovery Helicopters », sur Mars Sample Return Mission (NASA), NASA (consulté le ).
- Planetary Landers and entry Probes, p. 59-60.
- (en) 50 ans de coopération spatiale France-URSS/Russie, Tessier & Ashpool, , 500 p. (ISBN 2-909467-14-7), p. 106-109.
- (en) Wesley T. Huntress et Mikhail Ya. Marov, Soviet robots in the Solar System : missions technologies and discoveries, Springer Praxis, (ISBN 978-1-4419-7898-1), p. 343-366
- Science, 1986, v.231, p. 1416
- (en) Ralph D. Lorenz, Elizabeth P. Turtle, Jason W. Barnes, Melissa G. Trainer et al., « Dragonfly: A Rotorcraft Lander Concept for Scientific Exploration at Titan », Johns Hopkins APL Technical Digest, vol. 34, no 3, , p. 1-14 (lire en ligne).
- (en) Ralph D. Lorenz, Elizabeth P. Turtle, Jason W. Barnes, Melissa G. Trainer et al., « Dragonfly: A Rotorcraft Lander Concept for Scientific Exploration at Titan », Johns Hopkins APL Technical Digest, , p. 1-14 (lire en ligne [PDF]).
- (en) « NASA Invests in Concept Development for Missions to Comet, Saturn Moon Titan », NASA, .
Bibliographie
Ouvrages généraux
- (en) Andrew J. Ball, James R.C. Garry, Ralph D. Lorenz et Viktor V. Kerzhanovichl, Planetary Landers and entry Probes, Cambridge University Press, (ISBN 978-0-521-12958-9)
- (en) Larry A. Young, Pascal Lee, Edwin Aiken, Geoffrey Briggs, Gregory M. Pisanich, Shannah Withrow-Maser et Haley Cummings « The Future of Rotorcraft and other Aerial Vehicles for Mars Exploration » () (lire en ligne) [PDF]
—Vertical Flight Society’s - (en) Barnes D.P., Summers, P., Shaw, A., An investigation into aerobot technologies for planetary exploration (étude sur la technique des aérobots pour l'exploration planétaire), in Proc. 6th ESA Workshop on Advanced Space Technologies for Robotics and Automation, ASTRA 2000. ESTEC Noordwijk, NL, pp. 3.6-5, December 2000. PDF version « Copie archivée » (version du 15 mai 2006 sur Internet Archive) [PDF].
- (en) Anthony Colozza, Geoffrey A. Landis, and Valerie Lyons, Overview of Innovative Aircraft Power and Propulsion Systems and Their Applications for Planetary Exploration (vue d'ensemble sur les nouveaux systèmes de propulsion des aéronefs et leurs applications dans l'exploration planétaire), NASA TM-2003-212459 (July 2003) link to NASA TM « Copie archivée » (version du 12 mai 2008 sur Internet Archive)
- (en) Garg, Kanika et Thomas Kuhn, « Balloon Design for Mars, Venus, and Titan Atmospheres », Applied Sciences, vol. 10, no 9, , p. 3204 (DOI 10.3390/app10093204, lire en ligne)
Projets d'aérobots
- (en) Robert D. Braun, Henry S. Wright, Mark A. Croom, Joel S. Levine et David A. Spencer, « Design of the ARES Mars Airplane and Mission Architecture », x, , p. 22 (lire en ligne)Conception et architecture de la mission ARES)
- (en) Mark D. Guynn, Mark A. Croom, Stephen C. Smith, Robert W. Parks et Paul A. Gelhausen « Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission » () (lire en ligne) [PDF]
—2nd AIAA "Unmanned Unlimited" Systems, Technologies, and Operations — Aerospac - (en) Withrow-Maser Shannah, Koning, Witold, Kuang, Winnie et Johnson, Wayne R, « Recent Efforts Enabling Martian Rotorcraft Missions », x, , p. 1-10 (lire en ligne)Etude de faisabilité d'un hélicoptère martien de deuxième génération (1er génération Ingenuity)
- (en) Ralph D. Lorenz, Elizabeth P. Turtle, Jason W. Barnes, Melissa G. Trainer et al., « Dragonfly: A Rotorcraft Lander Concept for Scientific Exploration at Titan », Johns Hopkins APL Technical Digest, vol. 34, no 3, , p. 1-14 (lire en ligne)
Voir aussi
- Sonde spatiale
- Programme Vega, missions emportant des ballons pour étudier l'atmosphère de Vénus.
- Ingenuity, aérobot expérimental de type hélicoptère faisant partie de la mission Mars 2020.
- Venus Entry Probe, projet de mission emportant un ballon pour l'étude de Vénus.
- Dragonfly, aérobot qui doit explorer la lune Titan.
- Mars Sample Return, mission marienne de deux hélicoptères.