Aérogire
Un aérogire est un aérodyne à voilure tournante, c'est-à-dire un aéronef plus lourd que l'air dont la sustentation (portance) est assurée par la rotation d'un ou plusieurs rotors. L'hélicoptère équipé d'un rotor principal assurant également sa propulsion et d'un rotor anticouple en queue, est le représentant le plus courant de cette catégorie, mais il existe de nombreuses autres configurations, telles que l'autogire.

Les autres aérodynes (avions et planeurs) sont dits à « voilure fixe ».
Types d'aérogires
Autogire

L'autogire dispose d'une voilure tournante passive, entrainée par le mouvement de translation généré par une hélice. Il a connu un développement significatif depuis les années 1930.
| Catégorie | Configuration | Particularité(s) | Illustration |
|---|---|---|---|
|
Autogires à :
|
Sustentation par rotor libre. Propulsion par hélice. L'axe rotor est incliné vers l'arrière par rapport au plan de vol. Absence de couple rotor. Vol stationnaire impossible. |
Ces trois types se différencient par le système de lancement du rotor mais sans modification de la silhouette générale. |
|
| Autogire planeur | Sustentation par rotor libre. Décollage assisté par treuil. Non motorisé, les pales sont en autorotation sous l'effet du vent relatif | Développé par l'Allemagne pendant la Seconde Guerre mondiale, il a été utilisé pour des missions d'observation. |  Planeur autogire Focke-Achgelis Fa 330 exposé au Musée de l'air de Dayton, Ohio, États-Unis. |

Hélicoptère
L'aérogire le plus répandu est l'hélicoptère dont la voilure tournante assure à la fois la portance et la translation.
Le rotor et le système de commande (pas cyclique et pas collectif) des pales est la partie la plus complexe de l'hélicoptère. Les progrès obtenus sur la construction des pales permettent de privilégier la configuration à un seul rotor, même pour les hélicoptères lourds. La simplification du système de commande compense les avantages des configurations bi-rotors sur l'encombrement et l'absence de rotor anticouple d'autant qu'ils nécessitent un système de couplage ou de synchronisation des rotors.
| Catégorie | Configuration | Particularité(s) | Illustration |
|---|---|---|---|
| Hélicoptère mono-rotor et rotor anticouple | Sustentation et propulsion par un seul rotor. Petit rotor anticouple à la queue. Les deux rotors sont entraînés à vitesse constante par le groupe motopropulseur. | Configuration la plus courante des hélicoptères en service opérationnel de la fin du XXe et début du XXIe siècle. | 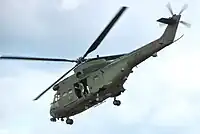 Hélicoptère SA330 Puma construit par Westland, UK, sous licence Aérospatiale, France. |
| Hélicoptère birotors en tandem | Sustentation et propulsion par deux rotors contrarotatifs à l'avant et à l'arrière du fuselage. Synchronisation nécessaire si les rotors sont partiellement superposés. | Configuration utilisée sur hélicoptères lourds lorsqu'un seul rotor ne pouvait suffire. | .jpg.webp) Boeing CH-47 Chinook |
| Hélicoptère birotors latéraux | Sustentation et propulsion par deux rotors contrarotatifs placés aux deux extrémités d'une poutre de part et d'autre du fuselage. La poutre peut participer à la sustentation. Rotors synchronisés. | Configuration utilisée sur hélicoptères lourds par des constructeurs soviétiques. | _Groningen_Airport.jpg.webp) Mil V-12, le plus grand hélicoptère construit. |
| Hélicoptère birotors engrenants | Sustentation et propulsion par deux rotors contrarotatifs dont les axes forment un V. Configuration intermédiaire entre rotors côte à côte et rotors coaxiaux. Rotors synchronisés avec précision. | Configuration principalement utilisée par un constructeur américain. |  Prototype construit par Kaman, USA. On distingue bien les deux rotors engrenants. |
| Hélicoptère birotors coaxiaux | Sustentation et propulsion par deux rotors contrarotatifs. Commande en lacet par différenciation du pas collectif et cyclique entre les deux rotors. | Configuration pratiquement abandonnée en raison de la complexité de la tête de rotor. |  Kamov Ka-31. On note la complexité de la tête du rotor. |
| Hélicoptère monorotor à éjection de gaz | L'absence de couple permet de supprimer le rotor de queue. | Configuration dont le Djinn, développé par Aérospatiale reste le seul exemple de production en série. Le Gyroptère de 1910 était une tentative utilisant une pale unique, configuration reprise sur des petits prototypes de drones. | 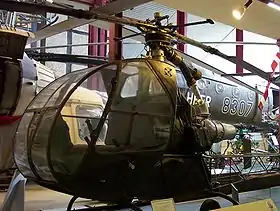 Le SO.1221 Djinn reste le seul modèle du type à avoir été construit en série. |
Girodyne

Combinaison d'hélicoptère, d'autogire et d'avion de ligne à hélice qui n'a jamais atteint la production en série (1959).
Le girodyne dispose d'une voilure tournante assurant la seule portance, la translation étant assurée par des moteurs dédiés.
| Catégorie | Configuration | Particularité(s) | Illustration |
|---|---|---|---|
| Girodyne (combiné hélicoptère) | Sustentation par rotor. Propulsion par hélice ou réacteur. Plan de rotation du rotor sensiblement horizontal en vol de croisière pour diminuer la traînée. | Configuration utilisée sur projets pour tenter de combiner les avantages de l'hélicoptère et ceux de l'avion. | .JPEG.webp) Le Sikorsky S-697/XH-59A (en), appareil expérimental de Sikorsky équipé de réacteurs (1973-1981). |
Convertiplane
Le convertiplane est un aérodyne à groupes motopropulseurs basculants assurant la sustentation en vol vertical et la propulsion en croisière — la portance est alors assurée par une voilure fixe.
| Catégorie | Configuration | Particularité(s) | Illustration |
|---|---|---|---|
| Convertiplane | Groupe motopropulseur basculant. Les hélices tournent dans le plan horizontal pendant les phases de décollage et d'atterrissage et assurent la sustentation. Elles tournent dans le plan vertical en croisière et assurent la propulsion. | Configuration utilisée sur certains ADAV. La phase transitoire entre le vol stationnaire et le vol horizontal est difficile à gérer. | .jpg.webp) Le V-22 Osprey est le seul convertible en service opérationnel. |
Multirotor

Les drones — dont la fonction principale n'est pas le transport — recourent fréquemment à la technique de la voilure tournante multirotor (4, 6 ou 8 rotors de sens de rotation deux à deux opposé).
Toutefois la technologie des drones quadrirotors pourrait être appliquée à d’authentiques aéronefs capables de transporter passagers ou fret.
| Catégorie | Configuration | Particularité(s) | Illustration |
|---|---|---|---|
| Quadrirotor | Sustentation et propulsion assurée par quatre rotors disposés en croix, le plus souvent sur un même plan. Afin d'éviter à l'appareil de tourner sur lui-même sur son axe de lacet, deux hélices tournent dans un sens et les deux autres dans l'autre sens. | C'est la configuration qui fut à l'origine des premiers vols stationnaires stables (Gyroplane Breguet-Richet). Solution retenue aujourd'hui pour des drones (voir Parrot AR.Drone), des jouets, ou des projets d'appareils de type convertiplane. |  Maquette du concept CityAirbus. |
Cycloptère

Le cycloptère se distingue par une voilure disposée non pas radialement mais parallèlement à l'axe de rotation, cette fois horizontal. Le principe est inspiré de la roue à aubes du bateau à vapeur. Quelques prototypes ont été réalisés dans les années 1930 mais n'ont pas donné de résultats satisfaisants.
Le cycloptère ne doit pas être confondu avec le rotor d'Anton Flettner qui utilise l'effet Magnus et n'utilise donc pas de voilure tournante à proprement parler.
Historique
Les tableaux ci-dessus rassemblent les configurations relativement récentes et les plus utilisées. Les premiers hélicoptères ont souvent utilisé des configurations à rotors multiples, superposés ou répartis ou des rotors auxiliaires de direction pour des raisons de stabilité et surtout pour obtenir une sustentation suffisante alors que la construction de pales profilées de grande longueur n'était pas encore possible.
Notes et références
Voir aussi
Bibliographie
- (en) J. Gordon Leishman, Principles of helicopter aerodynamics, Cambridge New York, Cambridge University Press, coll. « aerospace » (no 18), , 826 p. (ISBN 978-0-521-85860-1, lire en ligne).