Quadrirotor
Un quadrirotor ou quadricoptère est un giravion, un aéronef à voilure tournante comportant quatre rotors pour assurer sa portance. Les rotors sont généralement placés aux extrémités d'une croix. Afin d'éviter à l'appareil de tourner sur lui-même sur son axe de lacet, il est nécessaire que deux hélices tournent dans un sens et les deux autres dans l'autre sens. Pour pouvoir diriger l'appareil, il est nécessaire que chaque couple d'hélices tournant dans le même sens soit placé aux extrémités opposées d'une branche de la croix sur un châssis en « X » ou un châssis en « + ».

Histoire
Le premier quadrirotor[Note 1] à décoller du sol est le gyroplane Breguet-Richet, développé par société Breguet en 1907. Il ne décolle alors qu'à une hauteur de 60 cm et quatre hommes maintiennent la structure. L'année suivante, une seconde version, sur laquelle sont ajoutées des ailes biplans avance de quelques mètres en inclinant le fuselage de 12° vers l'avant. La version 2bis est présentée au Grand Palais en 1908.


À la suite d'un contrat engagé par l'armée américaine en , c'est l'Américain d'origine russe George de Bothezat qui fut le premier à faire voler un appareil quadrirotor[1]. Il réussit son premier vol en et réalise un vol de 1 min 42 s à 1,8 m du sol le . Le , l'appareil emporte deux personnes à 1,2 m du sol[1]. De nombreux vols furent effectués en 1923, mais l'appareil ne s’élèvera pas au-dessus de 5 mètres et l'armée mettra fin au contrat.
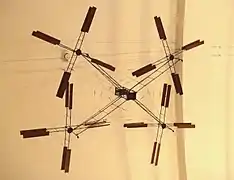
En Europe, le quadrirotor du Français Étienne Œhmichen, construit en 1922, réussit un vol stationnaire de cinq minutes en . En , il monte à plus de dix mètres d’altitude et effectue une boucle complète sur un kilomètre en sept minutes et quarante secondes devant le capitaine Cholat de l'Aéro-Club de France. En sus des quatre rotors de sustentation, le type no 2 d'Œhmichen était doté de huit hélices de direction.
Aujourd'hui, des quadrirotors sont principalement proposés comme maquettes télécommandées, appelés « drones ».
En , la société chinoise Ehlang, basée à Guangzhou, présente au CES de Las Vegas, aux États-Unis, un drone quadrirotor capable de transporter une personne pesant jusqu'à 100 kg à 500 mètres d'altitude[2].
Figures en vol
Le fonctionnement d'un quadrirotor est assez particulier. On distingue quatre mouvements possibles : les gaz, le lacet, le roulis et le tangage. Pour garder le contrôle du lacet, cela implique que deux hélices tournent dans le sens horaire (hélice à pas normal) et les deux autres dans le sens antihoraire (hélices à pas inversé).
3D
Le sens de rotation des moteurs BLDC peut être inversé au besoin ce qui augmente la complexité et la diversité des manœuvres sur certains modèles.
Gaz
Le mouvement de gaz correspond tout simplement à la montée/descente du quadrirotor. La montée est obtenue en augmentant la vitesse des quatre moteurs. La descente, qui elle est plus difficile à doser, s'obtient par la réduction de la vitesse des moteurs.
Lacet
Le mouvement de lacet sert à faire tourner le quadrirotor sur lui-même autour de l'axe central vertical. Il est obtenu en augmentant la vitesse des hélices à pas normal et/ou en diminuant proportionnellement la vitesse des hélices à pas inversé pour une rotation d'un côté et inversement de l'autre côté.
Roulis et tangage
Le roulis et le tangage sont des mouvements assez similaires visant à pencher le quadrirotor sur l'axe horizontal, vers l'avant ou l'arrière ou sur les côtés. Ce mouvement est obtenu en augmentant la vitesse des hélices et/ou en abaissant proportionnellement la vitesse des hélices opposées.
Utilisations et variantes
Des drones quadrirotor sont de plus en plus utilisés pour leur capacité à embarquer une caméra numérique et les nouveaux angles de prise de vue qu'ils offrent une fois en vol grâce à leur stabilité. L'opérateur reçoit, en général, les images directement sur une tablette tactile, un smartphone ou un poste de commande, ou les récupère après le vol. Ce type de drone peut être utilisé en essaim de drones, pour différents types de tâches.
Sur les drones de course, un domaine plus réservé au modélistes, où les drones sont assemblés et modifiés pour les besoins des utilisateurs, les vitesses peuvent passer de 0 à 100 km/h en 1 seconde et les stabilisateurs (Microelectromechanical systems, ou MEMS) sont souvent coupés afin d'augmenter la manœuvrabilité. Des visiocasques sont alors utilisées pour le pilotage en immersion (ou FPV dans le jargon ou vol à vue subjective) (BVLOS), par opposition au vol à vue direct (VLOS) dans ce domaine, décrivant un vol sans visiocasque en utilisant la commande et regardant le drone évoluer (à ne pas confondre avec le vol à vue en aéronautique qui s'oppose au vol aux instruments), et des systèmes de transmissions plus rapides, et permettant les défauts d'affichage (bruit, basse résolution) afin d'éviter les latences, sont utilisés.
Il existe aussi des drones octorotor ayant l'aspect des quadrirotor car ceux-ci ont des moteurs coaxiaux, donc deux sur un même bras. les moteurs sont montés l'un sur l'autre et tournent dans le sens opposé l'un de l'autre (système à redondance).
 Un Parrot AR.Drone.
Un Parrot AR.Drone. Drone quadrirotor canadien Aeryon Scout doté d'une caméra.
Drone quadrirotor canadien Aeryon Scout doté d'une caméra. Mini drone quadrirotor.
Mini drone quadrirotor. Octorotor coaxiaux OnyxStar FOX-C8 XT Observer d'AltiGator.
Octorotor coaxiaux OnyxStar FOX-C8 XT Observer d'AltiGator.
Professions liées aux drones quadrirotor
L'avènement du drone quadrirotor a permis la création de nouvelles méthodes de travail dans plusieurs domaines[3]. Ces drones sont utilisés par des journalistes, des réalisateurs et des photographes pour réaliser des prises de vue aériennes inédites mais également par les services de secours et d'intervention comme la police (surveillance des manifestations[4] ou filatures[5]), les pompiers, l'armée.
Ils sont également utilisés pour des relevés de terrain en utilisant toutes sortes de capteurs. Il peut s'agir de relevés topologiques, chimiques, volumétriques, permettant par exemple d'estimer les stocks, ou encore d'inspecter du matériel difficilement accessible[6].
Certains sont même utilisés par des trafiquants, par exemple pour livrer des produits illicites à l'intérieur de prisons[7].
Notes et références
Notes
- On parle également parfois de « quad-rotor » ou de « quad-copter ».
Références
- (en) De Bothezat helicopter - All the World's Helicopters and Rotorcraft.
- Jérôme Colombain, « Un drone pour le transport de personnes au CES de Las Vegas », France Info, .
- « Les drones multirotors », École française du drone.
- Benoit Hasse, « Paris : la préfecture de police va vous observer grâce à des drones », Le Parisien, .
- Judikael Hirel, « Vols de montres de luxe à Paris : cinq hommes arrêtés… grâce à un drone ! », sur Le Point, ).
- « Le 21 siècle : celui des drones », Kpotr image.
- Jean-Michel Normand, « Les drones se bousculent au-dessus des prisons », Le Monde, .