Aerial Regional-scale Environmental Survey
Aerial Regional-scale Environmental Survey, plus communément désigné par son acronyme ARES, est un projet de mission spatiale de type aérobot développé au début de la décennie 2000 par l'agence spatiale américaine, la NASA. Figurant en 2007 parmi les quatre finalistes du programme Mars Scout, sa candidature est écartée au profit de la mission mission Phoenix. ARES est un avion d'environ 125 kilogrammes (masse à sec de 66,5 kg) et d'une envergure de 6,2 mètres. Circulant à une altitude de 1 500 mètres durant environ 1 heure (distance parcourue environ 500 kilomètres), il devait recueillir des données sur le champ magnétique et l'atmosphère de Mars à basse altitude. ARES emportait un magnétomètre, un spectromètre de masse, un spectromètre à neutrons, un détecteur de radiations ionisantes, une station météorologique et plusieurs caméras. L'avion, propulsé par un moteur-fusée, devait suivre de manière autonome une trajectoire pré-planifiée.


Contexte : apport de l'avion pour l'exploration planétaire
Un avion survolant de manière autonome la surface de Mars à une altitude de quelques kilomètres peut fournir des données scientifiques inédites sur l'atmosphère, la surface et l'intérieur de la planète. Celles-ci combleront l'écart en matière d'échelle et de résolution spatiale entre les observations effectuées depuis l'orbite, qui fournissent des observations globales mais avec une résolution réduite, et les mesures in-situ réalisées par les engins se déplaçant à la surface de Mars (astromobiles) qui effectuent des mesures locales avec une résolution très élevée. En survolant des régions entières, les observations effectuées par un avion peuvent déboucher sur des découvertes scientifiques. Un avion permet également d'observer des terrains trop accidentés pour un engin se déplaçant sur le sol[1].
Historique
Première étude d'un avion propulsé martien (DSI - 1978)
L'utilisation de l'avion pour l'exploration d'une autre planète, nécessite la mise au point de technologies nouvelles. Au sein de l'agence spatiale américaine, la NASA, le premier projet d'avion martien est mené à la fin des années 1970 par la société DSI mandatée par le Jet Propulsion Laboratory. Cette étude s'appuie, en ce qui concerne la propulsion, sur l'architecture des petits avions pilotés à distance développés par le centre de recherche Dryden. Ces mini-avions, utilisés pour l'étude de l'atmosphère terrestre à très haute altitude, étaient propulsés par un moteur-fusée brulant de l'hydrazine. Plusieurs concepts sont analysés et le scénario choisi implique le lancement de trois engins spatiaux distincts emportant chacun quatre avions martiens repliés dans un bouclier thermique du même type que ceux protégeant les sondes spatiales Viking (diamètre 3,8 mètres). L'avion, d'une masse de 300 kilogrammes, a une envergure de 21 mètres et une surface alaire de 20 m2. Pour tenir dans un volume très réduit, l'avion était replié sur lui-même selon un schéma très complexe : les ailes étaient repliées sur elles-mêmes 6 fois, le fuselage trois fois et c'était également le cas des hélices. L'étude est arrêtée en 1978 par la NASA qui décide à l'époque de porter ses efforts sur d'autres projets martiens[2] - [3].
Projet MAP (1998-1999)
Le projet Mars Maicromission Airplane (MAP), mené en 1998-1999, est beaucoup moins ambitieux que l'étude précédente. Le projet est lancé par l'administrateur de la NASA Daniel Goldin dans le but de célébrer le 100e anniversaire du premier vol d'un avion par les frères Wright (2003), en réalisant la même première sur la planète Mars. L'avion martien devait tenir dans l'espace très restreint disponible pour la charge utile secondaire d'une fusée Ariane 5. Cette contrainte imposait un diamètre maximal de 80 centimètres au bouclier thermique dans lequel était enfermé l'avion. Le principal défi était de concevoir un avion pouvant tenir avec tous les systèmes annexes dans un volume aussi réduit. Les autres défis découlaient du nombre de Reynolds extrêmement faible et du régime de vol subsonique très élevé. L'avion propulsé par un moteur-fusée avait une masse de 19 kilogrammes et pouvait emporter une charge utile de 2,6 kilogrammes. L'envergure des ailes était de 1,73 mètres et la superficie alaire était de 0,67 m2. La quantité d'ergols emportée (3,2 kilogrammes) permettait de propulser l'avion durant 20 minutes ce qui lui permettait de franchir 200 kilomètres. Le projet, qui s'apparentait plus à un démonstrateur technologie qu'à une mission scientifique, fut annulé en novembre 1999. Malgré la différence de taille, les travaux menés dans le cadre du projet MAP ont fourni des bases solides pour la conception du projet ARES qui lui succède en 2001[4].
Développement de la mission ARES (2001-2002)
Le programme Mars Scout est créé en 2007 par l'agence spatiale américaine, la NASA, dans le but de développer des missions de reconnaissance de la planète Mars à faible cout utilisant des supports variés (atterrisseur, ballon, avion). Le projet d'avion martien ARES (acronyme de Aerial Regional-scale Environmental Survey) est conçu en 2001 et 2002 par le centre de recherche Langley de la NASA dans le but de concourir à la sélection de ce programme. Contrairement à MAP qui était surtout un démonstrateur technologique, ARES est une véritable mission scientifique qui a pour objectif de recueillir des données permettant d'améliorer notre connaissance de la nature et de l'évolution de l'atmosphère, de la surface et de la structure interne de Mars. Le déploiement d'une maquette à l'échelle 1/2 est testé avec succès dans la haute atmosphère terrestre (altitude 35 kilomètres) dont la densité est proche de celle de Mars. ARES fait partie des quatre projets qui passe la première phase de sélection du programme Scout en décembre 2002. Mais, six mois plus tard, c'est l'atterrisseur Phoenix qui est finalement retenu. Il se posera en mai 2008 à proximité de la calotte polaire nord[5] - [6].
Architecture
Cahier des charges
La robustesse, la simplicité, la réduction des risques sont les principes à la base de l'architecture retenue ainsi que la nécessité de convaincre les évaluateurs chargés de la sélection du programme Mars Scout. Le cahier des charges du projet repose sur l'utilisation d'un bouclier thermique de 2,65 mètres de diamètre (diamètre intérieur de 2,48 mètres) dérivé de celui développé pour les sondes spatiales Viking. Durant la mission scientifique l'avion spatial doit pouvoir suivre un trajet pré-programmé de manière autonome long de 500 kilomètres à une altitude comprise entre 1 et 2 kilomètres en fournissant une plateforme d'observation stable pour les instruments. Les données scientifiques sont transmises durant le vol ce qui impose une limitation des manœuvres effectuées pour maintenir la liaison utilisée pour la transmission des données[7].
Un volume de données scientifiques contraint
Comme toutes les sondes spatiales à destination de la surface, ARES comprend deux sous-ensembles : un module chargé du transit entre la Terre et Mars et la charge utile (avion) encapsulée dans le bouclier thermique avec des dispositifs de freinage (parachute,...) qui est larguée à l'approche de Mars. Cette planète ne disposant pas d'un réseau de satellites de télécommunications permettant une couverture continue pour relayer les données transmises par l'avion martien, cette tache est prise en charge par le module gérant le transit : à cet effet cette dernière, après avoir largué l'avion martien, effectue une manœuvre pour éviter de pénétrer dans l'atmosphère de Mars et afin de survoler la planète en maintenant une liaison télécom à la fois avec la Terre et l'avion martien. Mais le volume de données pouvant être transmis durant la mission est limité à la fois par les trajectoires respectives de l'avion martien et de la partie de la sonde spatiale assurant le relais et par l'énergie disponible à bord de l'avion martien pour les télécommunications. Cette contrainte a conduit à limiter en retour les performances de l'avion (distance parcourue) afin de ne pas produire de données qui ne seraient de toute façon jamais récupérées[7].
Aérodynamisme
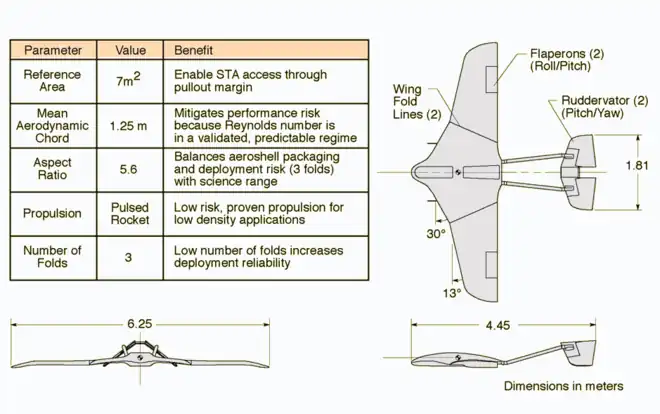
L'atmosphère de Mars présente des caractéristiques très différentes de celles de la Terre. Les formes aérodynamiques et les caractéristiques des structures chargées de contrôler le vol ont été mises au point dans le cadre d'une collaboration entre les centres de recherche de la NASA (Langley, Ames, Glenn), de l'industrie (Aurora) et des universités (Stanford, MIT) en utilisant des programmes de simulation 3D et 2D. L'avion est stocké à l'intérieur du bouclier thermique dont les dimensions limitées et la géométrie interne impose que celui-ci soit replié pour ne pas limiter l'envergure aux 2,65 mètres disponible. Le choix d'une aile gonflable, qui permettait de s'affranchir des contraintes imposée par les dimensions du bouclier, a été écarté parce qu'il présentait des risques supérieurs à ceux d'une aile fixe notamment du fait de l'exposition du matériau utilisé pour la structure gonflable aux conditions thermiques rigoureuses (froid) durant le transit entre la Terre et Mars. Pour le déploiement de l'avion un système reposant sur des ressorts a été préféré à un système télescopique solution qui comportait un historique émaillé d'incidents. Les concepteurs ont souhaité limiter au maximum le nombre d'opérations de déploiement, sources de risque. Le déploiement comporte trois étapes : deux pour déplier les ailes et une pour déplier la queue de l'avion. La géométrie de la queue de l'avion a été choisie de manière à éviter les interactions avec les jets de gaz expulsé par les moteurs-fusées assurant la propulsion[8].
La surface de l'aile de l'avion est fixée à une valeur de 7 m² pour lui permettre de remplir les objectifs de la mission. La cellule de l'avion comprend quatre sous-ensembles : le fuselage central (avec l'amorce des ailes), deux ailes identiques et l'empennage de la queue. La structure et la surface de ces pièces sont réalisées en sandwich composite. Le fuselage central comprend deux cloisons longitudinales pour rigidifier l'ensemble. L'empennage arrière en V inversé est rattaché au fuselage par deux poutres jumelles. Les mécanismes utilisés pour déployer l'avion, verrouiller les pièces articulées et absorbées l'énergie produites durant le déploiement sont réalisés en titane. L'avion dispose de quatre gouvernes : deux flaperons permettent de contrôler les mouvements de tangage et de roulis et deux grands gouvernails de direction permettant de contrôler les mouvements de tangage et de lacet. Chaque gouverne est actionnée par un moteur à courant continu[9].
Propulsion
Plusieurs types de propulsion ont été étudiés pour l'avion ARES : d'une part le recours à une hélice mise en mouvement soit par des moteurs électriques alimentés par des batteries ou des piles à combustible soit par des moteurs à combustion interne d'autre partdes moteurs-fusées à ergols liquides soit monoergols soit biergols. Deux critères ont été utilisés pour évaluer ces différents systèmes : la capacité à effectuer un vol de 480 kilomètres et la maturité de la technologie dans le contexte martien (cad finalement le degré de risque). La masse allouée au système propulsif (combustible et moteurs) était de 63 kilogrammes[10].
| Type de propulsion | Sous-catégorie | Masse à sec | Ergols | Autonomie (Heures de vol) | Distance parcourue | Maturité technique |
|---|---|---|---|---|---|---|
| Moteurs à hélice | ||||||
| Propulsion électrique | Pile à combustible | 48 kg | 15 kg | 3 heures | 1 512 km | Faible (TRL 4-5) |
| Batteries classiques | 63 kg | 0 kg | 0,4 heure | 202 km | Moyenne (TRL 4-6) | |
| Moteur à combustion interne | Piston Expander Engine | 19 kg | 44 kg | 2 heures | 1 008 km | Faible (TRL 4-5) |
| Moteur à quatre temps | 21 kg | 42 kg | 4,1 heures | 2 066 km | Faible (TRL 4-5) | |
| Moteurs-fusées | ||||||
| Moteur-fusées à ergols liquides | Bi-ergols | 15 kg | 48 kg | 1,2 heures | 605 km | Elevée (TRL 7-9) |
| Monoergol | 11 kg | 52 kg | 0,9 heures | 454 km | Elevée (TRL 7-9) | |
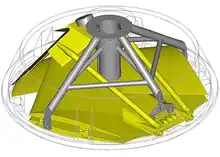
Dans l'environnement martien peu dense, le comportement d'une hélice, problématique, nécessitait des recherches approfondies que ne permettaient pas le budget alloué à une mission de type Mars Scout. Par ailleurs l'hélice, pour tenir dans le volume du bouclier thermique, devait être stockée en position repliée ajoutant un risque au moment déploiement. Le choix de moteurs-fusées biergols s'est donc imposé, le monoergol ne permettant pas d'atteindre les performances attendues. Pour réduire à la fois les risques, le cout et tenir le planning, l'avion ARES utilise trois petits moteurs-fusées développés par AMPA déjà utilisé à des milliers d'exemplaires. Brulant un mélange de méthylhydrazine et de MON-3, chaque moteur à une poussée de 22 Newtons de poussée et une impulsion spécifique de 293 secondes. Les ergols sont mis sous pression par de l'hélium. L'hélium et les deux ergols sont stockés dans des réservoirs situés près du centre de masse de l'avion[12].
- Système de propulsion d'ARES
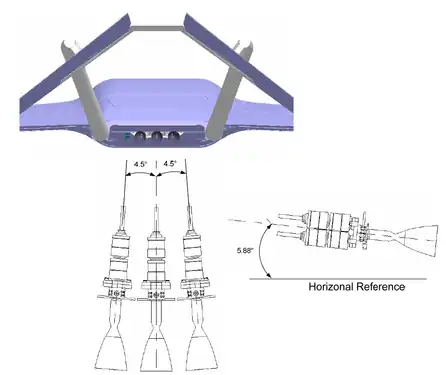 Position des trois moteurs-fusées d'ARES.
Position des trois moteurs-fusées d'ARES.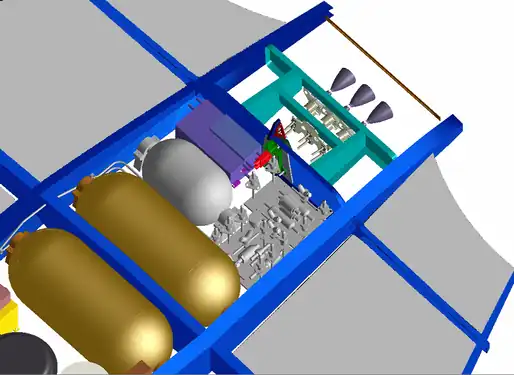 Schéma des différents composants du système de propulsion d'ARES.
Schéma des différents composants du système de propulsion d'ARES.
Objectifs scientifiques de la mission
La mission ARES devait contribuer à réduire les risques encourus par des astronautes en mission à la surface de Mars ainsi que contribuer à répondre à des questions scientifiques sur l'évolution et les caractéristiques actuelles de la planète[13] :
- L'absence d'un champ magnétique global entraine un niveau de radiations élevé à la surface de Mars qui limite son habitabilité pour les humains. Néanmoins certaines régions pourraient bénéficier d'un champ magnétique local suffisamment puissant pour assurer une certaine protection. ARES doit effectuer un relevé détaillé du champ magnétique généré par la croute planétaire des régions qu'il survolera avec une précision supérieure de deux ordres de magnitude à celle de l'orbiteur MGS à l'origine de la détection des champs magnétiques régionaux. Les détecteurs de rayonnement d'ARES doivent mesurer le flux de particules solaires énergétiques qui atteignent la surface de Mars et déterminer si les mini magnétosphères générées par le magnétisme régional assure une certaine protection la surface contre ces particules.
- La mission doit mesurer le champ électrique atmosphérique qui représente un danger potentiel en cas de décharge électrique atmosphérique durant la descente vers le sol d'un engin spatial robotique de grande taille ou durant les opérations des astronautes à la surface de Mars. La poussière qui circule à la surface et qui est chargée électriquement peut générer d'importants champs électriques. La mesure simultanée in situ de la quantité de poussière présente et du champ électrique doivent permettre d'évaluer cette hypothèse.
- ARES doit étudier la couche atmosphérique proche du sol en mesurant les principales caractéristiques de celle-ci durant son survol : pression, température, densité, direction et force du vent. À l'époque de l'étude d'ARES les seules informations disponibles sur cette partie de l'atmosphère étaient issues des mesures des atterrisseurs Viking et de la mission Mars Pathfinder.
- ARES doit étudier et mesurer le taux de déposition de gaz actifs sur le plan chimique (par exemple peroxyde d'hydrogène, ozone) qui se caractérisent par leur toxicité et leur action corrosive. Le spectromètre de masse d'ARES doit mesurer les concentrations de ces gaz à l'état de trace. Couplées avec les mesures tri-dimensionnelles du vent, ces données doivent permettre de calculer les flux et les dépôts de ces gaz à la surface de Mars.
Caractéristiques techniques
ARES est un avion d'environ 125 kilogrammes (masse à sec de 66,5 kg) et d'une envergure de 6,2 mètres. Circulant à une altitude de 1 500 mètres durant environ 1 heure 30 , il devait recueillir des données sur le champ magnétique et l'atmosphère de Mars à basse altitude. L'avion, propulsé par un moteur-fusée, devait suivre de manière autonome une trajectoire pré-planifiée[14].
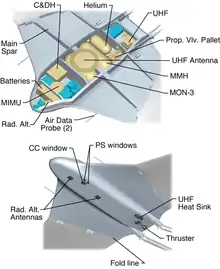
L'avion martien ARES devait emporter plusieurs instruments représentant une masse totale de 10,1 kilogrammes et consommant 30[15]:
- un magnétomètre avec deux capteurs montés en bout d'aile
- un spectromètre de masse situé dans le nez de l'appareil.
- une caméra dont l'objectif pointe vers le sol pour fournir le contexte.
- une caméra située dans la queue de l'appareil.
- un spectromètre tourné vers le nadir (surface de Mars)
La stabilité nécessaire pour obtenir une netteté inférieure au pixel dans les mesures effectuées par le spectromètre et de la caméra de contexte déterminent le degré de stabilité de l'avion. Cette stabilité est elle-même fonction de l'aérodynamique de l'avion, des turbulences atmosphériques et du temps d'intégration des mesures effectuées par les instruments. La reconstruction de la région du sol visée est impactée par les débits asynchrones des instruments scientifiques et la fréquence de la centrale à inertie (50 Herz). Les tests effectués dans la haute atmosphère terrestre ont validé les performances attendues en matière de stabilité et de pointage[15].
Déroulement de la mission
Lancement et transit vers Mars
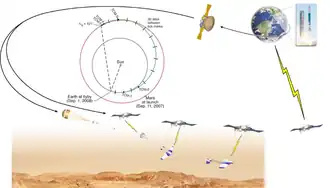
La mission ARES devait être lancée par une fusée Delta II de type 2925 qui fournissait une marge de 30% sur la masse satellisable par rapport au devis de poids prévus. Le lancement devait avoir lieu en septembre 2007 pour une arrivée à la surface de Mars en septembre 2008. L'arrivée à la surface de Mars était prévue 2h30 de l'après midi pour que Mars Reconnaissance Orbiter puisse servir de relais de télécommunications de secours en cas de défaillance du sous-ensemble de la sonde spatiale devant normalement assumer ce rôle[16].
Rentrée atmosphérique et déploiement de l'avion
La sonde spatiale comporte deux sous-ensembles : le module de descente contenant l'avion ARES qui pénètre dans l'atmosphère de Mars et le module chargé du transit Terre-Mars qui doit survoler Mars en jouant le rôle de relais de télécommunications entre l'avion ARES et la Terre. Ce dernier module de 225 kilogrammes, dérivé de celui de la mission Genesis peut fonctionner de manière autonome. Le scénario retenu est que le module de descente pénètre directement dans l'atmosphère de Mars sans mise en orbite préalable autour de Mars. Cette dernière solution a été écartée car elle nécessite un lanceur plus puissant (surcout de 15 à 20 millions US$) et parce que l'orbiteur ne permettrait pas de relayer aussi longtemps les communications entre l'avion et la Terre. Neuf heures avant l'arrivée sur Mars le module de descente contenant l'avion ARES se détache de la sonde spatiale . Cinquante minutes plus tard le module chargé du transit modifie à la fois son orientation et sa trajectoire de manière à survoler la planète Mars de manière à permettre d'acquérir les signaux de l'avion ARES sur toute la durée de sa mission[17].
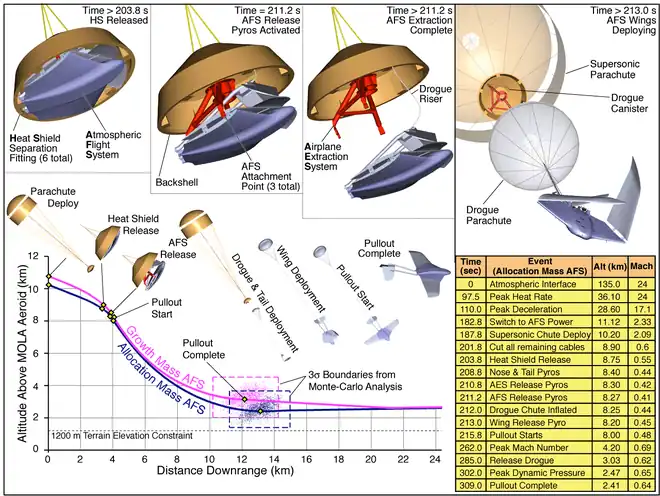
L'entrée dans l'atmosphère de Mars et la descente vers la surface se déroule de la même manière que pour les missions Mars Pathfinder et Mars Exploration Rover. L'angle de rentrée dans l'atmosphère est de -13° (à -10° la sonde spatiale rebondirait dans l'espace) et l'ensemble du processus de rentrée dure 5 minutes. Le parachute est déployé trois minutes après la rentrée atmosphérique alors que la vitesse de descente est encore supersonique. Le module de descente contenant l'avion largue le bouclier thermique avant puis sept secondes plus tard l'avion lui-même avec son système de déploiement : ce délai évite que l'avion vienne heurter le bouclier avant). Une fois libéré un parachute fixé à l'arrière de l'avion s'ouvre ce qui permet d'orienter correctement celui-ci et facilite le déploiement des ailes et de la queue de l'aéronef. Le déploiement est effectué par sectionnement des attaches maintenant ces parties repliées et par l'action de ressorts. L'avion utilise alors ses gouvernes pour entamer une ressource (réduire sa vitesse de descente). Une minute plus tard le parachute est largué et 30 secondes plus tard l'avion a complètement redressé sa trajectoire et se trouve à l'altitude à laquelle doit se dérouler la mission scientifique. L'ensemble des télémesures réalisées durant cette phase ainsi que les images du déploiement enregistrées durant le déploiement sont stoclées avant d'être retransmises par la suite vers la Terre pour analyse. L'ordinateur embarqué calcule la position de l'avion (altitude, position, direction et vitesse) afin de déterminer la route à suivre pour atteindre la prochaine étape du parcours pré-programmé[18].
Déroulement de la mission scientifique
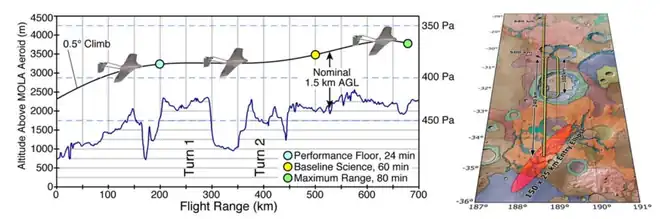
La mission scientifique débute alors. L'avion suit une trajectoire pré-programmée en utilisant les informations fournies par la centrale à inertie et l'altitude déterminée à l'aide des données du baromètre corrélées avec celles de l'altimètre radar. La mission dure 60 minutes durant lesquelles l'avion parcourt 500 kilomètres en transmettant de manière continue des données scientifiques et des télémesures. Celles-ci sont relayées vers la Terre par la partie de la sonde spatiale qui poursuit son vol en survolant Mars. Les données sont éventuellement stockées de manière à les retransmettre lorsque le débit est maximum (distance entre l'avion et la sonde spatiale la plus faible). Le relais peut être assuré, en plan de secours, par l'orbiteur de la NASA Mars Reconnaissance Orbiter. Pour maintenir un débit des transmissions maximum en maintenant un gain d'antenne au-dessus d'un certain seuil, les manœuvres programmées limitent l'inclinaison des ailes à 30° ce qui impose des virages avec un rayon minimum de 9 kilomètres. La vitesse de descente et de montée est réduite pour limiter les besoins de propulsion. La vitesse est pratiquement constante pour simplifier la collecte des données scientifiques. Une fois sa mission achevée, l'avion entame sa descente vers la surface de Mars. L'atterrissage se fait en douceur pour tenter d'éviter sa destruction. La liaison entre l'avion et la sonde spatiale qui survole Mars est maintenue après l'impact. Pour répondre à des contraintes de protection planétaire, il est nécessaire de connaitre avec précision le site de l'atterrissage (il est prévu que sa position soit connue avec une précision de 100 mètres). Les données collectées par la sonde qui survole Mars sont retransmises vers la Terre en bande X au cours des 24 heures suivantes [19]..
Sur Terre la trajectoire de l'avion est reconstruite en utilisation les données des capteurs embarquées avec les images fournies par la caméra de contexte et la caméra vidéo. La position au début de la mission scientifique est déterminée en utilisant les données de la centrale à inertie produites durant la phase de rentrée atmosphérique et de descente vers le sol. La position de l'avion durant la phase suivante est déterminée toutes les 10 secondes à l'aide de la caméra de contexte et sa progression entre ces intervalles est reconstruite à l'aide des données de la centrale à inertie. L'altitude est calculée en utilisant les données de la centrale à inertie, du radar altimètre et du baromètre qui sont rapprochées de la carte topographique de la surface de Mars réalisée grâce aux données collectées par les missions martiennes précédentes de la NASA. La trajectoire peut être reconstruite avec une précision de 10 mètres sur le plan horizontal et de 50 mètres sur le plan vertical[20].
Notes et références
- Design of the ARES Mars Airplane and Mission Architecture, p. 2
- (en) Development Science Inc, A concept study of a remotely piloted vehicle for Mars exploration, NASA, , 140 p. (lire en ligne)
- Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission, p. 2
- Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission, p. 2-3
- (en) Philippe Labrot, « Programme martien », sur Nirgal.net (consulté le )
- (en) « Aurora Chosen for NASA Mars Scout Mission Study », sur SpaceRef.com,
- Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission, p. 3
- Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission, p. 4-5
- Design of the ARES Mars Airplane and Mission Architecture, p. 11-12
- Design of a Mars Airplane Propulsion System for the Aerial Regional-Scale Environmental Survey (ARES) Mission Concept, p. 4-5
- Design of a Mars Airplane Propulsion System for the Aerial Regional-Scale Environmental Survey (ARES) Mission Concept, p. 10
- Design of a Mars Airplane Propulsion System for the Aerial Regional-Scale Environmental Survey (ARES) Mission Concept, p. 10-13
- (en) Joel S. Levine, M.A. Croom, H.S. Wright, B.D. Killoug et W.C. Edwards, « The Aerial Regional-scale Environmental Surveyor (ARES): New Mars Science to Reduce Human Risk and Prepare for the Human Exploration », X, , p. 2 (lire en ligne)
- (en) J.S. Levine, « THE AERIAL REGIONAL-SCALE ENVIRONMENTAL SURVEY (ARES) MISSION TO MARS », NASA,
- Design of the ARES Mars Airplane and Mission Architecture, p. 15
- Design of the ARES Mars Airplane and Mission Architecture, p. 2-3
- Design of the ARES Mars Airplane and Mission Architecture, p. 6-7
- Design of the ARES Mars Airplane and Mission Architecture, p. 7-9
- Design of the ARES Mars Airplane and Mission Architecture, p. 9
- Design of the ARES Mars Airplane and Mission Architecture, p. 9-10
Bibliographie
- (en) Robert D. Braun, Henry S. Wright, Mark A. Croom, Joel S. Levine et David A. Spencer, « Design of the ARES Mars Airplane and Mission Architecture », x, , p. 22 (lire en ligne)Conception et architecture de la mission ARES)
- (en) Mark D. Guynn, Mark A. Croom, Stephen C. Smith, Robert W. Parks et Paul A. Gelhausen « Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission » (lire en ligne) [PDF]
—2nd AIAA "Unmanned Unlimited" Systems, Technologies, and Operations — Aerospac () - (en) Christopher A. Kuhl, « Design of a Mars Airplane Propulsion System for the Aerial Regional-Scale Environmental Survey (ARES) Mission Concept », x, , p. 38 (lire en ligne)Conception du système de propulsion de la mission ARES
- (en) Christopher A. Kuhl, Henry S. Wright, Craig A. Hunter, Carl S. Guernsey et Anthony J. Colozza « Liquid Rocket Propulsion for Atmospheric Flight in the Proposed ARES Mars Scout Mission » () (lire en ligne) [PDF]
—AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit - (en) Henry S. Wright1, Joel S. Levine, Mark A. Croom1, William C. Edwards1, Garry D. Qualls1 et Joseph F. Gasbarre1 « Measurements from an Aerial Vehicle: A New Tool for Planetary Exploration » () (Measurements from an Aerial Vehicle: A New Tool for Planetary Exploration) [PDF]
—SPIE's 4th International Asia-Pacific Symposium on Remote Sensing of the Atmosphere, Ocean, Environment, and Space - (en) Henry Wright, Mark Croom, Robert Braun, Garry Qualls, Patrick Cosgrove et J. Levine « ARES Mission Overview - Capabilities and Requirements of the Robotic Aerial Platform » () (DOI 10.2514/6.2003-6577, lire en ligne) [PDF]
—2nd AIAA "Unmanned Unlimited" Conf. and Workshop & Exhibit - (en) Development Science Inc, A concept study of a remotely piloted vehicle for Mars exploration, NASA, , 140 p. (lire en ligne) — Première étude portant sur un avion propulsé pour l'exploration de Mars réalisée par la société DSI en 1978.
Voir aussi
- Aérobot
- Exploration du système martien
- Programme Mars Scout
- Ingenuity Aérobot expérimental de type hélicoptère faisant partie de la mission Mars 2020.