Ingenuity (hélicoptère)
Ingenuity ou Mars Helicopter Scout (MHS) est un petit hélicoptère d'un peu moins de deux kilogrammes développé par l'agence spatiale américaine, la NASA, qui est mis en œuvre à titre expérimental sur le sol de la planète Mars au cours de la mission Mars 2020, lancée le à bord d'une fusée Atlas V et dont l'atterrissage a eu lieu le . L'hélicoptère est embarqué à bord du rover Perseverance avant d'être déposé le 3 avril 2021 sur le sol martien.
Hélicoptère d'exploration de Mars
| Organisation |
|
|---|---|
| Constructeur | JPL |
| Vaisseau mère | Mars 2020/astromobile Perseverance |
| Type engin | Aérobot de type hélicoptère |
| Rôle | Engin expérimental |
| Statut | Opérationnel |
| Site exploré | Cratère Jezero (planète Mars) |
| Début de mission opérationnelle |
| Rayon d'action | 600 mètres |
|---|---|
| Vitesse |
Horizontale : 10 m/s Verticale : 3 m/s |
| Masse | 1,8 kg (dont 273 g de batteries) |
| Dimensions |
Fuselage : 13,6 × 19,5 cm Diam. rotors : 1,21 m |
| Propulsion | Rotors |
| Source d'énergie | Cellules solaires |
| Accumulateurs | Batteries lithium-ion |
| Autre caractéristique |
Plafond vol : 12 mètres Durée vol : 160 secondes |
| Charge utile | Caméras couleur |
|---|
Le , pour la première fois dans l'histoire de l'ère spatiale, un engin effectue un vol motorisé sur une autre planète. L'objectif est de tester les capacités d'un tel appareil dans le domaine de la reconnaissance optique du terrain, dans cet environnement caractérisé par une atmosphère très ténue limitant la portance et par des délais de communication qui interdisent tout contrôle direct du vol par un opérateur humain.
Ingenuity est un hélicoptère de 1,8 kilogrammes disposant de 2 rotors contrerotatifs coaxiaux. Il tire son énergie de 6 batteries lithium-ion rechargées par des cellules solaires qui lui permettent de voler 160 secondes et de parcourir au maximum 600 mètres. Son système de navigation lui permet de suivre sans intervention humaine un trajet pré-programmé. Sa seule charge utile est une caméra.
Au cours des deux premières années de la mission sur Mars, Ingenuity a largement prouvé ses capacités en effectuant 51 vols (actualisé au 3 mai 2023) et en parcourant 11,7 kilomètres avec un temps de vol total 91,4 minutes. Ingenuity a réalisé de nombreuses photos aériennes qui ont été utilisées par les pilotes de l'astromobile Perseverance pour identifier les obstacles et les sites prometteurs et a prouvé sa robustesse en résistant à l'hiver martien. Ingenuity ouvre de nouvelles perspectives pour l'exploration de Mars. L'architecture de la mission de retour d'échantillons martiens développée par la NASA et l'Agence spatiale européenne a été modifiée pour comprendre deux hélicoptères similaires à Ingenuity. Ceux-ci seront chargés de collecter les tubes contenant des échantillons de sol martien déposés par l'astromobile Perseverance en cas de panne de celui-ci.
Contexte : l'exploration du système solaire par des aérobots

L'exploration du système solaire à l'aide de robots débute à la fin des années 1950. Commencée modestement, avec des engins légers uniquement capables de survoler le corps céleste visé, elle s'est rapidement sophistiquée avec la mise au point en une quinzaine d'années d'engins capables de se placer en orbite (orbiteur), puis de se poser (atterrisseur) sur la surface et enfin de se déplacer sur le sol (astromobile ou rover). La capacité d'exploration de ces astromobiles est toutefois restée limitée, notamment du fait de leur vitesse réduite et de la nécessité de déposer ceux-ci sur un terrain relativement plat. Très rapidement, les ingénieurs ont étudié l'envoi de robots capables de flotter, planer ou voler dans l'atmosphère : ces aérobots présentent l'avantage d'étendre la portée de l'exploration des planètes ou des lunes lorsque celles-ci sont dotées d'atmosphère (Vénus, Mars, Jupiter, Saturne, Titan, Uranus et Neptune). Vénus, qui dispose d'une atmosphère dense, est la première destination d'un aérobot et reste la seule jusqu'en 2021 : en 1985, un ballon équipé d'instruments scientifiques, est largué par la sonde spatiale soviétique Vega et étudie avec succès l'atmosphère de Vénus[1]. Le cas de la planète Mars, cible privilégiée de l'exploration spatiale, est une destination compliquée pour ce type d'engin. L'atmosphère très ténue (seulement 1 % de la pression atmosphérique présente sur Terre) ne permet de produire qu'une portance très faible et la mise au point d'un aérobot est beaucoup plus difficile (pour flotter dans l'atmosphère de Mars, un ballon doit être 150 fois plus volumineux que son équivalent largué à 50 kilomètres d'altitude dans l'atmosphère de Vénus). Plusieurs projets martiens de planeurs ou d'avions propulsés sont étudiés et proposés à la NASA, sans qu'aucun ne soit retenu[2].
Développement du projet d'hélicoptère martien
Une étude suggérant le recours à un hélicoptère autonome pour explorer Mars est publiée en 2002[3]. En 2014, un article décrivant le concept d'hélicoptère martien préfigurant Ingenuity, est publié par AeroVironment et le Jet Propulsion Laboratory[4]. En , l'agence spatiale américaine (la NASA) décide, après une phase d'évaluation, que la mission Mars 2020 embarquera, à titre expérimental, le petit hélicoptère de 1,8 kilogramme afin de tester le recours à des vols de reconnaissance optique. Cette expérimentation doit durer une trentaine de jours. Son coût, évalué à 55 millions de dollars américains, n'est pas inclus dans le projet Mars 2020[5] - [6]. Cette décision est prise, malgré l'opposition du responsable scientifique de la mission Mars 2020 pour qui les tests prévus ne contribuent pas à la mission mais viennent bousculer le calendrier déjà très chargé des opérations de l'astromobile sur le sol de Mars[4].
L'hélicoptère, qui doit être embarqué, est l'aboutissement de développements entamés cinq ans plus tôt au Jet Propulsion Laboratory (JPL) de la NASA. Début 2019, pour vérifier le comportement de l'hélicoptère dans les conditions martiennes, l'équipe qui développe l'hélicoptère effectue d'abord des tests avec un modèle d'ingénierie qui représente une approximation proche de l'hélicoptère réel. Après avoir accumulé un temps de vol supérieur à 75 minutes, des tests plus réalistes sont effectués avec un modèle similaire à celui qui doit être envoyé sur Mars. Celui-ci est placé dans la chambre à vide de 7,5 mètres de diamètre du JPL, dans laquelle est reproduite la composition de l'atmosphère raréfiée de Mars et sont simulées sa pression (1 % de celle de l'atmosphère terrestre) et les températures extrêmes (jusqu'à −90 °C). Pour reproduire la pesanteur de Mars (un tiers de celle de la Terre), une élingue dont la tension est adaptée en permanence soulève l'hélicoptère[4] - [7] - [8].
Le petit hélicoptère est baptisé Ingenuity (Ingéniosité) à la suite d'un appel à nommage lancé par la NASA auprès des élèves et étudiants américains[9].
Choix architecturaux

Contraintes du vol sur Mars et conséquences sur les caractéristiques du Mars Helicopter Scout
Un hélicoptère martien est handicapé par la faible densité de l'atmosphère de cette planète. En effet, la puissance requise pour sustenter l'engin (W) est définie de la manière suivante :

où :
- est la portance du rotor (N)
- est la superficie du disque rotor ()
- est la masse volumique de l'atmosphère martienne ()





En vol stabilisé, la portance est égale en module et opposée au poids de l'engin, où est sa masse et la gravité sur Mars.



La puissance requise est donc proportionnelle à la puissance 3/2 de la masse à sustenter, et inversement proportionnelle à la puissance 1/2 de la masse volumique de l'atmosphère.
La pression atmosphérique martienne est environ 100 fois plus faible que la pression terrestre. Par contre, l'atmosphère martienne étant essentiellement constituée de gaz carbonique, sa masse volumique est 50% plus élevée dans les mêmes conditions de température et de pression. En tablant sur la valeur moyenne de pression de 600 Pa, on peut estimer que la masse volumique atmosphérique est 100 fois plus faible sur Mars que sur Terre au niveau du sol.
A contrario, la gravité martienne vaut 38 % de celle de la Terre, ce qui aide la sustentation.
Le rapport est, pour une même superficie du disque rotor, 2.34 fois plus élevé sur Mars que sur Terre ( = 2.34).


Pour limiter la puissance nécessaire au vol sur Mars, et donc préserver une autonomie satisfaisante, une superficie du disque rotor plus élevée que celle d'un hélicoptère terrestre de masse équivalente est nécessaire.
Une difficulté supplémentaire est liée à la vitesse du son plus faible sur Mars (240 m/s contre 340 m/s sur terre). Ceci oblige à diminuer la vitesse de rotation du rotor dans les mêmes proportions, ce qui n'est favorable ni au bilan de masse, ni au rendement du moteur électrique s'il n'est pas équipé d'un train d'engrenages pour réduire la vitesse du rotor par rapport à celle du moteur.
Type d'aéronef
Le choix de la formule hélicoptère par opposition à celle du quadrirotor s'explique par la masse importante du rotor liée à sa grande taille pour les raisons vues plus haut. La stabilisation d'un quadrirotor est effectuée en agissant sur la vitesse de rotation des rotors mais la vitesse de modulation est fonction de la masse de ceux-ci (inertie). Dans le contexte martien, la stabilisation d'un quadrirotor devient problématique comme sur Terre à haute altitude. L'utilisation de rotors contrarotatifs coaxiaux permet de gagner en encombrement par rapport au recours à un rotor anticouple[10].
Contraintes de masse
Pour parvenir à faire voler l'hélicoptère dans l'atmosphère de Mars, il fallait concevoir un engin suffisamment léger, ce qui n'a été rendu possible que récemment grâce aux avancées réalisées dans le domaine des accumulateurs (liées au développement des téléphones portables), des cellules photovoltaïques (rendement), des systèmes inertiels et des ordinateurs embarqués[8]. Ainsi, il est conçu pour que sa masse ne dépasse pas 1,8 kg[7] (soit un poids de 6,69 newtons sur le sol martien).
Une phase d'atterrissage délicate
La phase la plus délicate du vol de l'hélicoptère est l'atterrissage, du fait des turbulences qui peuvent déséquilibrer l'engin. La solution retenue est d'arrêter la propulsion à un mètre au-dessus du sol et de laisser l'hélicoptère atteindre le sol en chute libre. La vitesse verticale à l'atterrissage est en conséquence de plus d'1 m s−1. Le train d’atterrissage est conçu pour encaisser cette vitesse sur un sol qui peut présenter une pente importante[11].
- Assemblage de l'hélicoptère (2019)
 L'hélicoptère est fixé sous le châssis du rover avec ses hélices alignées en position couchée sur le côté (avril 2020).
L'hélicoptère est fixé sous le châssis du rover avec ses hélices alignées en position couchée sur le côté (avril 2020). L'hélicoptère et quelques membres du projet.
L'hélicoptère et quelques membres du projet.
Caractéristiques techniques
Structure
Les dimensions du fuselage de l'hélicoptère sont de 13,6 × 19,5 centimètres, soit la taille d'un ballon de basket-ball. Avec son train d'atterrissage, ses rotors et les panneaux solaires qui les coiffent, Ingenuity est haut de 49 centimètres. Le volume très réduit du fuselage contient les ordinateurs, les batteries, les capteurs (caméras, altimètre) et le système de télécommunications. L'hélicoptère est construit autour d'un tube vertical, dans lequel circulent les liaisons électriques reliant le processeur aux rotors ainsi qu'au vaisseau mère (l'astromobile Perseverance) durant le transit vers Mars. Sur ce tube sont attachés de haut en bas : le système de fixation à l'astromobile, un panneau solaire, les deux rotors ainsi que les servomoteurs les mettant en mouvement, la partie centrale du train d'atterrissage et enfin le fuselage de forme cubique. Le train d'atterrissage comprend quatre pieds en composite carbone longs de 38,4 centimètres fixés au corps d'Ingenuity en faisant un angle oblique avec la verticale, qui maintiennent le corps de l'aéronef à une hauteur de 13 centimètres au-dessus d'un terrain plat[12] - [13]. Ingenuity a une masse de 1,8 kilogrammes sur Terre comme sur Mars, mais son poids plus faible sur Mars équivaut à celui d'une masse de 680 grammes sur Terre, du fait de la différence de gravité entre ces deux planètes[14].
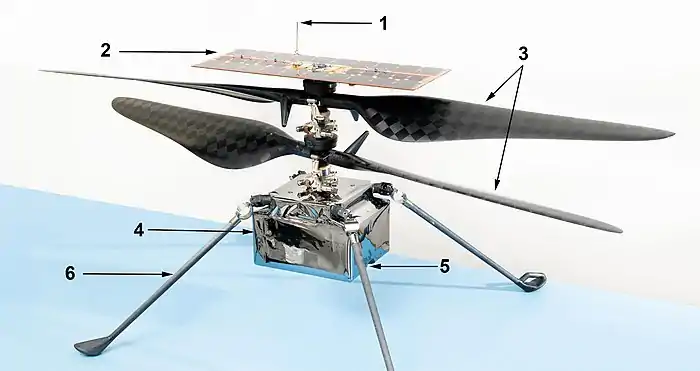
Propulsion



L'hélicoptère se déplace dans les airs grâce à deux rotors contrarotatifs coaxiaux bipales. Le diamètre des rotors est de 1,21 mètre et ils se situent à 0,8 mètre de hauteur. Les pales sont réalisées en fibre de carbone. La vitesse de rotation est comprise entre 2 400 et 2 900 tours par minute, soit dix fois celle d'un rotor principal d'hélicoptère sur Terre, pour pouvoir être efficace dans l'air particulièrement peu dense de Mars (équivalent à l'atmosphère terrestre à une altitude de 25 kilomètres)[15].
Énergie
L'énergie est le principal facteur limitatif concernant les capacités de l'hélicoptère. L'énergie nécessaire pour la propulsion, le fonctionnement des capteurs (altimètre, caméras), les résistances chauffantes, l'avionique, les processeurs et le système de télécommunications est fournie par six accumulateurs lithium-ion, d'une capacité de 36 watts-heures et d'une masse totale de 273 grammes, qui occupent une grande partie du volume du fuselage. D'une capacité équivalente à seulement trois batteries de smartphone, ils sont rechargés par des cellules photovoltaïques qui sont fixées au-dessus des rotors et qui ont une surface active de 544 cm2. Sur ces 36 watts-heures, 30% (10,7 watts-heures), sont gardés en réserve. 21 watt-heures environ sont nécessaires pour l'alimentation des résistances chauffantes chargées de maintenir les différents systèmes à une température compatible avec les contraintes de fonctionnement durant la nuit martienne. 10 watts-heures sont disponibles pour un vol de 90 secondes sur la base d'une consommation en pointe de 510 watts durant 20 % du temps et de 350 watts durant le reste du vol[14] - [16]. L'emplacement des batteries, entourées par les circuits électroniques qui contrôlent l'appareil, est étudié pour que ces éléments maintiennent de manière efficace une température correcte pendant leur mission sur le sol martien[17].
Capteurs
Les capteurs, qui sont des composants achetés sur le marché, comprennent une caméra de navigation noir et blanc, une caméra couleur haute définition, une centrale à inertie, un inclinomètre et un altimètre[18] :
- La caméra de navigation NAV (NAVCAM) est située sous le fuselage et fournit des images en noir et blanc de 0,5 mégapixel. Elle est pointée vers le sol et est utilisée pour déterminer l'altitude et la position de l'hélicoptère. Elle dispose d'un champ de vue de 133° sur 100 degrés. et permet d'acquérir 10 images par seconde.
- La caméra couleur RTE (Return to Earth) à haute définition (13 mégapixels) de Sony a un champ de vue de 47° sur 47°. Elle est fixée sur un des coins inférieurs du fuselage et pointe 22° sous l'horizon. Elle doit effectuer quelques prises d'image du terrain qui sont transmises à la Terre pour tester les capacités de reconnaissance d'Ingenuity.
- L'hélicoptère dispose de deux centrales à inertie 3 axes pour assurer une redondance utilisant la technologie MEMS et fournies par Bosch.
- L'inclinomètre 2 axes utilise également la technologie MEMS.
- L'altimètre fourni par Garmin mesure l'altitude jusqu'à une hauteur de quelques dizaines de mètres.
Télécommunications
Compte tenu du délai dans les échanges avec la Terre (une dizaine de minutes dans la configuration Terre-Mars la plus favorable), l'hélicoptère est obligé de voler de manière autonome en appliquant des instructions transmises avant le vol. Un système radio embarqué à bord de l'hélicoptère reçoit ces commandes et transmet les images et les télémesures. Les échanges avec la Terre sont relayés par un système de télécommunications dédié installé sur l'astromobile. L'hélicoptère dispose de deux émetteurs-récepteurs radio fonctionnant à une fréquence de 900 MHz avec une puissance d'émission de 0,9 watt en consommant 3 watts à l'émission et 0,15 watt à la réception. L'antenne filaire est fixée au sommet de l'hélicoptère. Le débit est compris entre 20 et 250 kilobits par seconde, pour une portée allant jusqu'à 1 000 mètres. En vol, l'hélicoptère ne reçoit pas mais émet pour communiquer les données collectées[16].
Avionique et processeurs
L'avionique est répartie sur cinq circuits imprimés, dont quatre forment les côtés du fuselage cubique et le cinquième sa partie inférieure. L'ordinateur embarqué utilise un microprocesseur Snapdragon cadencé à 2,26 Ghz et doté d'une mémoire vive de 2 gigaoctets et d'une mémoire flash de 32 gigaoctets. L'ordinateur prend en charge la fonction de navigation en utilisant les données fournies par les caméras et pilote en conséquence les rotors via deux microcontrôleurs redondants. Le logiciel qui tourne sur le microprocesseur est assisté par un circuit intégré de type FPGA, qui prend en charge certaines fonctionnalités comme le contrôle d'attitude (avec une fréquence de rafraichissement de 500 Hz), la gestion des entrées-sorties de la centrale à inertie, de l'altimètre et de l'inclinomètre, et la gestion des télécommunications. Le FPGA est une version militarisée du ProASIC3L de MicroSemi[19].
Le système d'exploitation choisie pour gérer Ingénuity est GNU/Linux. Ol a été choisi car il fournit une plates-forme particulièrement stables. Selon Open Source pour U, "la disponibilité des serveurs Linux est très élevée et la disponibilité est d'environ 99,9 %", Ingenuity de redémarrer son serveur Linux après chaque mise à jour ou correctif. Il s'agit d'une caractéristique très importante pour le premier drone hélicoptère nouvellement construit de Mars, qui sera le premier avion à effectuer un vol atmosphérique contrôlé sur une planète autre que la Terre[20]
Système de navigation
Compte tenu de la distance entre la Terre et Mars, il n'est pas possible à un opérateur sur Terre de contrôler l'hélicoptère en vol : un signal radio met en moyenne douze minutes pour parvenir jusqu'à sa destination. L'hélicoptère doit donc disposer d'un système de navigation lui permettant de prendre des décisions de manière autonome en s'appuyant sur les instructions transmises avant le vol par les opérateurs sur Terre tout en prenant en compte les différents facteurs perturbateurs tels que le vent, les anomalies de fonctionnement des systèmes embarqués, etc. Les instructions décrivent précisément les différentes phases de vol théorique (altitude, vitesse, points de passage, site d'atterrissage). Le système de navigation utilise les données fournies par l'altimètre laser (distance au sol), la caméra (images du sol) et la centrale à inertie (accélération et vitesse de rotation) pour déterminer l'orientation de l'hélicoptère, sa position, la vitesse et sa direction. Lors du décollage et jusqu'à 1 mètre du sol, seules les données de la centrale à inertie sont exploitées car la poussière soulevée peuvent perturber la caméra et l'altimètre[21].
Durant le vol, le système de navigation s'appuie d'abord sur les données de la centrale à inertie pour déterminer la position, la vitesse et l'orientation de l'hélicoptère. À partir de ces données, il transmet éventuellement des instructions au système de contrôle de la propulsion pour corriger les paramètres de vol. Ces instructions sont transmises 500 fois par seconde. Pour pallier la dérive de la centrale à inertie, le système de navigation s'appuie également sur les photos du sol prises par la caméra à un rythme de trente images par seconde. Chaque photo prise est comparée à la précédente. Le changement de position des éléments les plus remarquables (variations de couleur, rochers, ondulation de terrain) est rapproché par l'algorithme du logiciel avec ce qu'il aurait dû être compte tenu des instructions transmises par la Terre. En cas de déviation, des instructions de correction sont transmises au système contrôlant la propulsion[22].
Durant la phase d'atterrissage, pour les mêmes raisons qu'au décollage (poussière), seules les données de la centrale à inertie sont utilisées pour guider l'hélicoptère dès que l'altimètre indique que celui-ci se trouve à moins d'un mètre du sol[21]
Des capacités opérationnelles très réduites
Ingenuity est un engin qui a des capacités opérationnelles particulièrement réduites. L'énergie dont il dispose lui fournit une autonomie de seulement 90 secondes car la faible densité de l'atmosphère martienne nécessite de faire tourner à grande vitesse ses rotors et ses batteries sont limitées par sa capacité d'emport découlant également de la faible portance de ses pales. Il ne peut voler de nuit car son système de guidage repose sur les images prises par ses caméras. En début de journée, l'hélicoptère doit reconstituer l'énergie perdue durant la nuit pour maintenir une température minimale dans ses systèmes (la température sur Mars chute à −90 °C durant la nuit). Il ne doit également pas voler trop tard dans la journée, car il lui faut reconstituer alors l'énergie perdue pour survivre à la nuit qui suit. Tous ces paramètres font que seulement un tiers environ de l'énergie dont dispose Ingenuity est réellement utilisée pour le vol à proprement parler[17]. Enfin, le vent ne doit pas souffler trop fort[23].
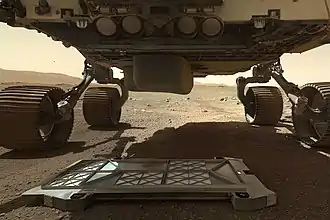
Déploiement sur le sol de Mars
.jpg.webp)
.jpg.webp)
.jpg.webp)
.png.webp)
Deux jours après l'atterrissage de Mars 2020 à la surface de la planète le , l'hélicoptère transmet des informations sur son statut[24]. L'hélicoptère martien embarqué est fixé sous le châssis de l'astromobile Perseverance avec ses hélices alignées en position couchée sur le côté. Une fois Perseverance à la surface de Mars, une vérification générale de ses différents sous-systèmes est effectuée, dont ceux de l'hélicoptère. Les batteries de celui-ci sont rechargées. Une fois cette phase achevée, l'astromobile se met à circuler en recherchant un terrain de 10 × 10 mètres pouvant servir de zone d'atterrissage pour l'hélicoptère. L'équipe projet a calculé que la probabilité de trouver un terrain convenable (terrain quasi plat, pas de roche de plus de 5 centimètres de haut) dans l'ellipse retenue pour l'atterrissage (7,6 × 6,6 kilomètres) était de 75 %. Le cache, qui protège l'hélicoptère des débris à l'atterrissage, est largué le . Les pieds du train d'atterrissage d'Ingenuity sont déployés puis il est pivoté dans sa position naturelle, avant d'être largué sur le sol (la garde au sol de l'astromobile est supérieure à la hauteur de l'hélicoptère déployé) (voir vidéo en annexe) début avril[25]. De nombreux tests statiques sont effectués.
Le fonctionnement du rotor est testé le mais est interrompu par un dispositif de protection du logiciel de vol. Le premier vol est repoussé au puis au [26] - [27].
Mise en œuvre
Dix jours ont été prévus pour le déploiement et trente jours pour tester les capacités en vol. Pour le premier vol, l'astromobile s'éloigne de l'hélicoptère à une distance de sécurité (50 à 100 mètres) puis l'hélicoptère s'élève à la verticale jusqu'à une hauteur de 3 mètres avant de faire du surplace durant 30 secondes (voir animation en annexe). Quatre autres vols de quelques centaines de mètres sont prévus avec une durée pouvant aller jusqu'à 90 secondes[5]. Une fois la phase d'expérimentation achevée, il était initialement prévu d'abandonner l'hélicoptère à l'endroit du site de son dernier atterrissage après le cinquième et dernier vol d'essai programmé. Toutefois, vu les résultats très encourageant des quatre premiers vols dépassant toutes les espérances, la NASA a décidé de prolonger la mission d'Ingenuity et de passer à une phase opérationnelle pilote durant laquelle l'hélicoptère effectuerait des missions de reconnaissance pour l'astromobile au début de sa mission scientifique. Les tests effectués durant les cinq premiers vols programmés et le début de la phase opérationnelle pilote sont les suivants[6] - [28]:

Les cinq premier vols de démonstration technologique
| N° vol | Objectif | Déroulement |
|---|---|---|
| 1 | Validation fonctionnement en vol | Vol effectué vers 11 heures du matin (vents faibles). Ascension à 3 m avec une vitesse verticale de 1 m/s, vol stationnaire durant 20 secondes et descente avec une vitesse verticale de 1 m/s (voir animation/vidéo en annexe). |
| 2 | Vol horizontal distance réduite | Vol jusqu'à 5 m de hauteur et quelques mètres de distance. |
| 3 | Vol horizontal distance accrue | Distance horizontale portée à 50 m. |
| 4 | Vol horizontal distance accrue | Distance horizontale portée à 266 m. |
| 5 | Objectif fixé en fonction des résultats des vols précédents | Vol sur une distance de 129 m. Altitude record de 10 m. Site d'atterrissage différent de celui de décollage. |
| 6 | Atterrissage sur un autre site jamais exploré et photographié | Premier vol de la phase opérationnelle pilote. Atterrissage impromptu à la suite d'oscillations incontrôlées en vol causées par un problème du système de navigation, mais Ingenuity a survécu. |
Le premier vol est réalisé avec succès le lundi . Ingenuity devient le premier engin propulsé volant mis en œuvre sur un autre corps du système solaire que la Terre. Durant ce test d'une durée de 39 secondes l'hélicoptère s'élève de 3 mètres puis effectue un vol stationnaire avant de se reposer[30] - [31].
Le second vol comprenant un déplacement horizontal de deux mètres est effectué le jeudi 22 avril[32].
Au cours du troisième vol qui a lieu le . Ingenuity effectue une boucle de 100 m à une altitude de 5 m en s'éloignant de 50 mètres de son point de départ[33] - [34].
La première tentative de 4ème vol d'Ingenuity le 29 avril 2021 échoue car l'hélicoptère ne parvient pas à passer en mode vol. La seconde tentative, qui a lieu le 30 avril 2021, est un succès et le vol dure 117 secondes[35]. Comme pour les deux vols précédents, l'hélicoptère monte d'abord à une altitude de 5 mètres. Il vole ensuite vers le sud sur une distance de 133 mètres puis revient à son point de départ couvrant ainsi une distance totale de 266 mètres[36]. Un nombre record d'images a été capturé, environ 60 au total pendant les 50 derniers mètres avant que l'hélicoptère ne fasse demi-tour[36].
Le 7 mai, peu avant le cinquième vol d'Ingenuity, un enregistrement sonore du quatrième vol, capté par un microphone placé sur l'astromobile Perseverance, est publié par l'agence spatiale. Cet enregistrement est à la limite des capacités du système d'enregistrement car la très faible densité de l'atmosphère martienne (1 % à peine de celle de l'atmosphère terrestre) et sa composition très différente (96 % CO2) réduisent la propagation du son. L'atmosphère très ténue de Mars atténue considérablement la propagation des ondes sonores qui sont également perçues comme beaucoup plus sourdes. Comme l'hélicoptère se trouve à plus de 80 mètres du microphone de la Supercam du rover Perseverance, les ingénieurs ont du amplifier le signal sonore et soustraire le bruit de fond produit par les rafales de vent pour obtenir un rapport signal sur bruit audible[37] - [38].
Le cinquième vol a lieu le . Ingenuity monte à une altitude de 10 m et parcourt une distance horizontale de 129 m à la vitesse de 3,5 m/s. Le vol dure 108 secondes et, pour la première fois, l'hélicoptère ne retourne pas à son point de départ mais se pose sur un nouveau site d'atterrissage[39]. Ce cinquième vol marque la fin de la phase de démonstration technologique de l'engin.
Une nouvelle phase de démonstration dédiée à l'évaluation des capacités opérationnelles d'un hélicoptère martien
Compte tenu des bons résultats obtenus durant les premiers vols (télécommunications, énergie, navigation) et la bonne santé d'Ingenuity, l'agence spatiale américaine décide dès le mois d'avril de prolonger l'expérience qui ne devait initialement durer que 30 jours. Cette nouvelle phase doit permettre d'évaluer les capacités d'un hélicoptère à réaliser des expériences de reconnaissance ainsi qu'à prendre en charge d'autres fonctions dans le cadre de futures missions martiennes[40].
Durant cette nouvelle phase, Ingenuity doit accompagner Perseverance ou même le précéder pour effectuer des opérations de reconnaissance aérienne pour déterminer les routes que peut emprunter l'astromobile, évaluer l'intérêt scientifique de sites et réaliser des images stéréos permettant de réaliser des cartes topographiques. La fréquence des vols devrait se ralentir et passer d'un vol tous les deux/trois jours à un vol toutes les deux à trois semaines pour ne pas générer d'interférences avec les opérations scientifiques de Perseverance[40].
Sixième vol
Le sixième vol réalisé le est un succès partiel, car en raison d'une défaillance technique, Ingenuity a dû interrompre celui-ci et se poser 5 m avant le site d'atterrissage prévu. Mais cet atterrissage a pu se faire en douceur et l'hélicoptère est toujours opérationnel[41]. L'incident a été provoqué par le processus du processus gérant la navigation de l'hélicoptère qui repose à la fois sur la centrale à inertie (IMU) et les images fournies par la caméra couleurs produisant des images du sol. La centrale à inertie qui détermine la vitesse de déplacement corrige ses résultats en utilisant les images du sol fournies par la caméra. Trente images sont prises chaque seconde. L'origine du problème provient d'une erreur de transmission d'une seule image par cette caméra au calculateur de navigation. La perte de données ainsi occasionnée a provoqué une erreur cumulée dans l'horodatage (timestamp) des images suivantes qui ont toutes été décalées dans le temps de quelques dizaines de millisecondes. Cela a suffi pour générer des erreurs de calcul de la position, de la vitesse, de l'altitude et de l'attitude de l'engin. Celui-ci s'est mis à osciller. Heureusement, la robustesse d'autres systèmes embarqués contrôlant la phase d'atterrissage et ne nécessitant pas les images de navigation a permis un atterrissage en douceur de l'hélicoptère[41]. Malgré elle, la NASA a exploré les limites de l'enveloppe de vol d'Ingenuity et dispose ainsi de données inédites et acquises en conditions réelles dans l'atmosphère très ténue de Mars qui lui permettront peut-être d'améliorer la robustesse du programme de calcul de navigation autonome d'Ingenuity.
Septième vol
Le Ingenuity a réalisé un vol de 62,8 secondes à une vitesse maximale de 4 m/s. Il a parcouru 106 m à une altitude de 3 m au-dessus du sol pour atterrir à un nouvel endroit non encore reconnu situé au sud de son lieu de départ[42] - [43] - [44]. C'est le second vol de l'hélicoptère à avoir atterri sur un nouveau site sans l'avoir survolé au préalable. Cependant, l'équipe d'Ingenuity s'était assurée auparavant que le site d'atterrissage n'était pas trop accidenté grâce aux images de la caméra HiRISE embarquée à bord de l'orbiteur MRO (Mars Reconnaissance Orbiter) de la NASA. L'objectif de ce vol était la collecte de photographies couleurs stéréos afin de tester la faisabilité de prises de vue aérienne pour faciliter la navigation du rover Perseverance. Le vol s'est déroulé sans encombre.
Huitième vol
Le Ingenuity a volé environ 160 m dans la direction sud- sud-est (157,5 degrés dans le sens horlogique à partir du nord) pour atterrir sur le site E, à environ 133,5 m de Persévérance[45] - [46]. La durée du vol a été de 77,4 secondes, l'altitude maximale de 10 m, la distance horizontale de 160 m, la vitesse maximale de 4 m/s. Le vol a été couronné de succès.
Le , le JPL a également annoncé avoir téléchargé la semaine précédente une mise à jour du programme de contrôle de vol pour résoudre définitivement le problème du micro-contrôleur ("watchdog"), et que le test du rotor et le huitième vol ont confirmé que la mise à jour fonctionnait[47].
La NASA doit encore réaliser une autre mise à jour critique affectant une partie importante du logiciel de contrôle de vol afin de pouvoir résoudre les problèmes rencontrés lors du sixième vol avec la surcharge du processeur central (CPU) due à la lourdeur du transfert des photos de la caméra couleur (13 megapixels). Le problème n'étant pas encore résolu, les vols 7 et 8 n'ont pas utilisé la caméra couleur afin d'éviter de répéter l'incident du vol 6. Cette mise à jour importante devrait être faite avant le neuvième vol[47].
Neuvième vol
Lors du neuvième vol réalisé le , Ingenuity parcourt une distance record de 625 m (aller simple) en 166,4 secondes en direction du sud à la vitesse de 5 m/s. Il survole le site de Séítah particulièrement intéressant sur le plan scientifique, mais difficile d'accès pour Perseverance du fait de ses ondulations sableuses. Ce neuvième vol est risqué en raison de la topographie inégale du terrain. Le survol du site de Séítah couvert de dunes de sable de hauteur variable rend difficile la tâche du système de navigation qui s'appuie sur les images du sol pour déterminer la trajectoire. même si l'hélicoptère ralentit lors de la partie la plus délicate de son parcours. Il s’est posé sans encombre au point F[48] - [49] - [50].
Dixième vol
Le dixième vol qui a lieu le . dure 165,4 secondes. Ingenuity parcourt une distance de 233 m à 12 m d’altitude et à une vitesse moyenne de 5 m/s. Entre les points de départ et d’arrivée (nouveau site d’atterrissage G), Ingenuity se dirige vers le sud puis l’ouest en survolant les Raised Ridges (18,42808° N, 77,44373° E) et 8 points prédifinis dont il prend à chaque fois deux photographies couleur, permettant ainsi de réaliser une représentation stéréoscopique du terrain[51]. Ces photographies sont utilisées pour préparer l'étude des Raised Ridges par l'astromobile Perseverance[52] - [53] - [54].
Onzième vol
Le onzième vol a eu lieu le [55] - [56]. Ce vol est une étape de transition destinée à déplacer l’hélicoptère vers un nouvel endroit scientifiquement intéressant pour l'astromobile Perseverance et d’où Ingenuity pourra le guider dans ses missions de reconnaissance. Le vol a duré 130,9 secondes. Le déplacement de 383 m en direction du nord-ouest s’est effectué à une altitude maximale de 12 m et à la vitesse maximale de 5 m/s. Ingenuity atterrit sur le site H (18,43278° N, 77,43919° E. Depuis cette nouvelle base il pourra survoler la partie sud de Séítah qui présente un intérêt géologique.
Douzième vol
Le Ingenuity a réalisé son douzième vol à une altitude de 10 mètres et à une vitesse de 5 m/s afin de survoler la région sud de Séítah lors d’un trajet aller et retour de 450 mètres avant de revenir se poser à son point de départ (site H, 18,43278° N, 77,43919° E). L'hélicoptère est resté en l'air pendant 169 secondes. C'est la durée de vol la plus longue effectuée jusqu'à présent et le deuxième parcours le plus long, le rayon d'action d'Ingenuity étant surtout limité par l'échauffement de son moteur essentiellement fonction de la durée du vol. Le but de l’opération était de prendre une dizaine d’images couleurs stéréoscopiques afin d'assister l’équipe de Perseverance dans le choix des éléments les plus pertinents à étudier sur ce site[57]. L’hélicoptère totalise 22 minutes de vol cumulées au cours de ses 12 sorties[58].
Treizième vol
Le treizième vol d'Ingenuity a eu lieu le (Sol 193). L'hélicoptère fait une boucle deux fois plus courte (~ 210 m) que celle du vol précédent (~ 450 m) pour une durée comparable (161 s). Le vol est réalisé à plus basse altitude (8 m) et à plus faible vitesse (3.3 m/s) pour améliorer la qualité des prises de vue. L’objectif est d’obtenir une dizaine d’images couleurs détaillées d’une zone particulière de la région de Séítah sud. Il s'agit de compléter le relèvement topographique de la crête et des flancs d'une dune dans la direction sud-ouest, c.-à-d. en sens opposé des prises de vue du vol précédent (N° 12, photographies dans la direction nord-est). Après s’être éloigné de son point de départ (18,43278° N, 77,43919° E) d’une distance de 105 m, Ingenuity est revenu s’y poser[59].

Quatorzième vol : Conjonction solaire et test d'augmentation de la vitesse de rotation (octobre 2021)
En raison de l'allongement de sa mission, Ingenuity est amené à voler dans des conditions météorologiques non prévues et dégradées du fait du cycles des saisons sur Mars. Avec l'accroissement progressif de la température au printemps et en été, la densité de l'air diminue. Elle se réduit de 0.0145 kg/m3 à 0.012 kg/m3. L'enveloppe de vol d'Ingenuity a été conçue pour des densités de l'air comprises entre 0.0145 et 0.0185 kg/m3, soit l'équivalent de 1.2 –1.5 % de la densité de l'atmosphère terrestre au niveau de la mer. A la conception de l'hélicoptère il était prévu qu'Ingenuity dispose d'une réserve de puissance de 30 % pour le décollage et les phases ascensionnelles de ses vols. Avec la baisse de la pression atmosphérique, Ingenuity ne dispose plus que d'une marge de 8 % et s'approche des conditions de décrochage aérodynamique provoquées par la perte de portance. La NASA décide donc d'augmenter la vitesse de rotation du rotor et de la faire passer à 2 700 RPM (révolution par minute) pour regagner de la puissance. Cela implique de plus grandes sollicitations pour l'hélicoptère. Non seulement, la puissance à fournir par les batteries est plus élevée, mais les forces exercées sur les pales du rotor sont accrues. La vitesse à l'extrémité des pales s'approche de Mach 0.8, ce qui crée une traînée plus importante et risque aussi de provoquer des vibrations intempestives si la structure de l'hélicoptère entre en résonance. Le but de ce quatorzième vol est donc de tester le comportement de l'appareil dans ces conditions limites[60]
Un premier essai effectué le statique (au sol) teste le comportement de l'hélicoptère. L'objectif est de s'assurer que le niveau de vibrations produites ne perturbent pas le fonctionnement des capteurs et ne sont pas susceptible d'endommager la structure) lorsque la vitesse de rotation du rotor est portée 2 800 tours par minute. Ingenuity réussit ce test et un vol est programmé pour le 18 septembre. L'hélicoptère devait s'élever jusqu'à une altitude de 5 mètres avant de se poser. Mais ce vol est annulé car durant les vérifications avant chaque vol, l'hélicoptère signale une anomalie (oscillation de 1 degré autour de la position attendue) au niveau de deux des servo-moteurs qui contrôlent l'angle des pales. Deux explications sont envisagées : une usure due à un nombre de vols plus élevé que prévu qui aurait augmenté le jeu entre les pièces ou un phénomène d'oscillation généré par la vitesse de rotation du rotor plus élevée que prévu dans les scpécifications. Les ingénieurs disposent de plusieurs semaines pour identifier l'origine du problème car les opérations sur Mars doivent marquer une pause du fait de la conjonction solaire martienne qui doit durer jusqu'à la mi-octobre 2021. Durant cette période Mars vu de la Terre se situe derrière le soleil, ce qui interrompt les communications entre l'astromobile et le centre de contrôle sur Terr [61] - [62].
Le 24 octobre les communications avec l'astromobile sont rétablies et Ingenuity effectue un vol très court (23 secondes) au cours duquel il s'élève à 5 mètres au-dessus du sol et il effectue une translation horizontale de 2 mètres. Pour la première fois la caméra de navigation réalise des photos en noir et blanc à une fréquence élevée (7 images par seconde). Ce quatorzième vol, peu spectaculaire mais réussi, permet de valider la poursuite des opérations dans les conditions dégradées par la baisse de densité de l'atmosphère[63].
Le défi de l'hiver martien (mai-décembre 2022)
À compter de mai 2022, l'hélicoptère doit subir l'hiver martien, d'une durée de six mois, caractérisé par des nuits très froides (la température peut chuter jusqu'à (-90 °C)) et des tempêtes de poussière qui, en obscurcissant le ciel et en recouvrant les cellules solaires de particules, limitent la capacité de recharge des six accumulateurs lithium-ion qui fournissent l'énergie. Or ceux-ci comme certains composants électroniques de l'hélicoptère ne sont pas conçus pour résister à de telles températures. L'hélicoptère dispose de résistances chauffantes pour que la température des composants les plus fragiles ne chutent pas sous un certain seuil mais ces radiateurs nécessitent de l'énergie pour pouvoir fonctionner[64].
Le 3 mai 2022, l'astromobile ne parvient pas à reprendre contact avec l'hélicoptère. En effet celui-ci a du, durant la nuit, arrêter son ordinateur interne pour préserver le peu d'énergie disponible pour les résistances chauffantes. Le lendemain, les cellules solaires permettent le redémarrage de l'électronique mais l'horloge interne de l'hélicoptère a été réinitialisée. Ne disposant plus d'une horloge synchronisée avec celle de l'astromobile, Ingenuity tente de contacter celui-ci à une heure où il n'était pas à l'écoute (les sessions de télécommunications entre les deux engins se font sur des plages de temps bien précises). Les ingénieurs modifient la programmation pour que l'astromobile maintienne son canal de communications ouvert durant toute la journée du 5 mai et le contact avec Ingenuity peut être rétabli. Pour que l'incident ne se reproduise pas, les ingénieurs de la NASA prennent temporairement une décision risquée car non prévue à la conception de l'hélicoptère. Le seuil de déclenchement des résistances chauffantes est abaissé de -15°C à -40°C ce qui devrait limiter l'énergie consommée et permettre au bout de quelques jours de recharger suffisamment les accumulateurs pour reprendre un mode de fonctionnement normal. Quelques jours plus tard, les ingénieurs constatent que cette décision a été la bonne et un nouveau vol est programmé (le 29 ème). La menace représentée par la baisse des températures devrait toutefois persister jusqu'en octobre[64] - [65].
Défaillance de l'inclinomètre
L'inclinomètre est un capteur de l'hélicoptère qui fournit avant le décollage l'inclinaison de celui-ci par rapport à la verticale. Cette donnée est utilisée pour définir la trajectoire suivie au décollage. Les ingénieurs de la NASA découvrent en préparant le 29e vol que ce capteur est tombé en panne. Une solution de secours avait été préparée avant cette défaillance. Un patch est téléchargé pour que les données fournies par l'inclinomètre soient désormais obtenues à partir des sorties de la centrale à inertie. Le résultat est moins précis mais suffisant pour permettre la reprise des vols[66].
Interruption hivernale des vols
Le 11 juin l'hélicoptère effectue son 29e vol relativement court. Mais les vols sont interrompus les deux mois suivants pour laisser passer les tempêtes de poussière qui atteignent leur paroxysme en juillet[67].
Reprise des vols (aout 2022)
Mi-aout il fait toujours aussi froid (-86°C durant la nuit) mais le ciel est plus clair ce qui permet la reprise de vols, qui seront toutefois brefs pour ne pas trop solliciter les accumulateurs. Les ingénieurs vérifient que l'hélicoptère est toujours en état de voler après ce long arrêt hivernal en faisant un test statique du fonctionnement du rotor. Celui-ci est d'abord mis en rotation à une vitesse de 50 tours par minute le 6 aout puis de 2573 tours par minute le 15 aout. Les résultats satisfaisants permettent la reprise des vols[68].
Au cours des six mois suivants une dizaine de vols sont effectués et permettent à l'hélicoptère de suivre l'astromobile dans ses déplacements (pour que les liaisons avec la Terre qui passent par Perseverance, l'hélicoptère ne doit pas trop s'éloigner de celui-ci). Mais l'hiver martien se prolonge avec des tempêtes de poussière qui persistent jusqu'en janvier 2023 limitant la durée de ces vols. Ce n'est finalement que fin janvier que les batteries parviennent à retrouver un taux de charge de 90% en fin de journée permettant d'envisager des vols de longue durée. Cette restauration des capacités d'Ingenuity viennent à point pour permettre de suivre l'astromobile dans son exploration du sommet du delta. Celle-ci constitue un nouveau défi car le terrain très irrégulier pourrait entrainer la perte des liaisons entre l'hélicoptère et l'astromobile[69].
Exploration de la partie amont du delta (janvier 2023-)
En janvier 2023 l'astromobile Perseverance commence à explorer la partie amont du delta caractérisée par des terrains relativement jeunes particulièrement intéressants sur le plan scientifique. Pour atteindre les sites les plus prometteurs, il est prévu que l'astromobile effectue un transit rapide en s'enfonçant dans un canyon relativement encaissé et étroit, qui rendent la navigation difficile. Dans ce contexte, l'équipe projet a assigné à l'hélicoptère un rôle important: celui-ci doit effectuer des missions de reconnaissance qui permettent d'identifier à l'avance les obstacles situés sur la trajectoire de l'astromobile (il s'agit notamment de vérifier si les photos prises par le satellite MRO utilisées par l'équipe en charge de la navigation sont fiables) et de trouver les sites intéressants à étudier. Néanmoins le relief de la région handicape l'hélicoptère à deux titres. D'une part celui-ci, pour maintenir la liaison avec la Terre, doit rester en contact visuel avec l'astromobile (sans obstacle entre les deux engins) qui lui sert de relais télécom. D'autre part la trajectoire de l'hélicoptère ne doit pas lui faire survoler l'astromobile pour ne pas risquer d'endommager ce dernier en cas de mauvais fonctionnement de son système de navigation ou de panne mécanique ce qui devient difficile du fait de l'étroitesse du canyon dans lequel le rover circule. Le premier vol dans cette nouvelle région a lieu le 27 janvier 2023 (vol n° 41). Pour remplir sses objectifs il est prévu que l'hélicoptère devance systématiquement de deux jours l'astromobile mais cet objectif se révèle difficile à tenir. Pour y parvenir, la fréquence des vols et la vitesse en vol est augmentée (lors du vol 45 l'hélicoptère établit un nouveau record de vitesse à 6 mètres par seconde)[70].
- Vidéos des premiers vols test d'Ingenuity, filmés par le rover Perseverance.
- Vol test inaugural du 19 avril 2021.
- Second vol test du 22 avril 2021.
- Troisième vol test du 25 avril 2021.
Synthèse des vols effectués
| N° | Date | Distance horizontale |
Altitude maximale |
Vitesse maximale |
Durée (secondes) |
Remarques |
|---|---|---|---|---|---|---|
| 1 | 19 avril 2021 | 0 m. | 3 m. | 0 m/s | 39,1 s. | |
| 2 | 22 avril 2021 | 4 m. | 5 m. | 0,5 m/s | 51,9 s. | |
| 3 | 25 avril 2021 | 100 m. | 5 m. | 2 m/s | 80,3 s. | |
| 4 | 30 avril 2021 | 266 m. | 5 m. | 3,5 m/s | 116,9 s. | |
| 5 | 7 mai 2021 | 129 m. | 10 m. | 2 m/s | 108,2 s. | |
| "Vols opérationnels" | ||||||
| 6 | 22 mai 2021 | 215 m. | 10 m. | 4 m/s | 139,9 s. | |
| 7 | 8 juin 2021 | 106 m. | 10 m. | 4 m/s | 62,8 s. | |
| 8 | 21 juin 2021 | 160 m. | 10 m. | 4 m/s | 77,4 s. | |
| 9 | 5 juillet 2021 | 625 m. | 10 m. | 5 m/s | 166,4 s. | |
| 10 | 24 juillet 2021 | 233 m. | 12 m. | 5 m/s | 165,4 s. | |
| 11 | 4 aout 2021 | 383 m. | 12 m. | 5 m/s | 130,9 s. | |
| 12 | 16 aout 2021 | 450 m. | 10 m. | 4,3 m/s | 169,5 s. | |
| 13 | 4 septembre 2021 | 210 m. | 8 m. | 3,3 m/s | 160,5 s. | |
| 14 | 24 octobre 2021 | 2 m. | 5 m. | 0,5 m/s | 23 s. | |
| 15 | 6 novembre 2021 | 407 m. | 12 m. | 5 m/s | 128,8 s. | |
| 16 | 20 novembre 2021 | 116 m. | 10 m. | 1,5 m/s | 39,1 s. | |
| 17 | 5 décembre 2021 | 187 m. | 10 m. | 2,5 m/s | 116,8 | |
| 18 | 15 décembre 2021 | 230 m. | 10 m. | 2,5 m/s | 124,3 s. | |
| 19 | 7 février 2022 | 63 m. | 10 m. | 1 m/s | 99,8 s. | |
| 20 | 25 février 2022 | 391 m. | 10 m. | 4,4 m/s | 130,3 s. | |
| 21 | 10 mars 2022 | 370 m. | 10 m. | 3,85 m/s | 129,2 s. | Début de la saison hivernale. Durant 8 mois, l’hélicoptère dispose d’une énergie limitée qui ne lui permet que des vols courts. |
| 22 | 19 mars 2022 | 68 m. | 10 m. | 1 m/s | 101,4 s. | |
| 23 | 23 mars 2022 | 358 m. | 10 m. | 4 m/s | 129,1 s. | |
| 24 | 3 avril 2022 | 47 m. | 102 m. | 1,45 m/s | 69,5 s. | |
| 25 | 8 avril 2022 | 704 m. | 10 m. | 5,5 m/s | 161,3 s. | |
| 26 | 19 avril 2022 | 360 m. | 8 m. | 3,8 m/s | 159 s. | |
| 27 | 23 avril 2022 | 307 m. | 10 m. | 3 m/s | 152,9 s. | |
| 28 | 29 avril 2022 | 418 m. | 10 m. | 3,6 m/s | 152,4 s. | |
| 29 | 11 juin 2022 | 179 m. | 10 m. | 5,5 m/s | 66,6 s. | Premier vol après la" résurrection de l'hélicoptère". Une pause de deux mois est effectuée pour laisser passer les tempêtes de poussière hivernales. |
| 30 | 20 aout 2022 | 2 m. | 5 m. | 0,5 m/s | 33,3 s. | Les tempêtes de poussière se calment autorisant des vols courts. |
| 31 | 6 septembre 2022 | 97 m. | 10 m. | 4,75 m/s | 56,6 s. | |
| 32 | 17 septembre 2022 | 94 m. | 10 m. | 4,75 m/s | 55,3 s. | |
| 33 | 24 septembre 2022 | 111 m. | 10 m. | 4,75 m/s | 55,2 s. | |
| 34 | 22 novembre 2022 | 0 m. | 0 m. | 0 m/s | 18,3 s. | |
| 35 | 3 décembre 2022 | 15 m. | 14 m. | 3 m/s | 52 s. | |
| 36 | 10 décembre 2022 | 110 m. | 10 m. | 5,5 m/s | 60,5 s. | |
| 37 | 17 décembre 2022 | 62 m. | 10 m. | 3 m/s | 55,2 s. | |
| 38 | 4 janvier 2023 | 111 m. | 10 m. | 3,5 m/s | 74,3 s. | |
| 39 | 11 janvier 2023 | 140 m. | 10 m. | 4 m/s | 78,7 s. | |
| 40 | 19 janvier 2023 | 178 m. | 10 m. | 3,2 m/s | 91,61 s. | |
| 41 | 27 janvier 2023 | 183 m. | 10 m. | 3 m/s | 109,1 s. | |
| 42 | 4 février 2023 | 248 m. | 10 m. | 3 m/s | 137,2 s. | |
| 43 | 16 février 2023 | 390 m. | 12 m. | 4 m/s | 146 s. | Les tempêtes de poussière se calment enfin permettant la reprise des vols longs. |
| 44 | 19 février 2023 | 334 m. | 12 m. | 3,5 m/s | 141,3 s. | |
| 45 | 22 février 2023 | 496 m. | 12 m. | 6 m/s | 144,5 s. | |
| 46 | 25 février 2023 | 445 m. | 12 m. | 5,3 m/s | 135,9 s. | |
| 47 | 9 mars 2023 | 440 m. | 12 m. | 5,3 m/s | 146,1 s. | |
| 48 | 21 mars 2023 | 398 m. | 12 m. | 4,65 m/s | 149,9 s. | |
| 49 | 2 avril 2023 | 282 m. | 16 m. | 6,5 m/s | 142,7 s. | |
| 50 | 13 avril 2023 | 322 m. | 18 m. | 4,6 m/s | 145,7 s. | |
| 51 | 22 avril 2023 | 188 m. | 12 m. | 4 m/s | 136,9 s. |
Vers une utilisation future à des fins opérationnelles
Des résultats qui ouvrent des perspectives nouvelles pour l'exploration martienne
Alors que l'objectif était de réaliser des vols durant 30 jours martiens, Ingenuity continue de fonctionner début mai 2023 soit 700 jours après l'atterrissage de Perseverance sur Mars. Courant novembre 2022 il avait effectué 51 vols (91 minutes de vol en temps cumulé), parcouru 11,7 kilomètres, effectué 25 décollages et atterrissages, pris milliers de photos avec sa caméra de navigation et plusieurs centaines photos couleurs haute définition. Il a largement démontré sa valeur aussi bien pour les taches scientifiques que pour les opérateurs planifiant les déplacements de l'astromobile. Son état lui permet de continuer à accompagner l'astromobile sur le sommet du delta qui doit être exploré en 2023[72] - [51].
Ingenuity a démontré qu'un hélicoptère martien disposait de la capacité unique d'atteindre des sites inaccessibles par tout autre moyen, notamment par un engin sur roues, comme les dunes de Seitah dans le cratère Jezzero. Un hélicoptère permettrait d'étudier les parois verticales d'un cratère ou de pénétrer dans des tubes de lave. Leur masse peu élevée permettrait d'envisager une mission sur les hauts plateaux de Mars que les astromobiles ne peuvent explorer (en altitude, la couche atmosphérique n'est pas assez importante pour freiner suffisamment les engins spatiaux arrivant à grande vitesse sur Mars). Un aérobot (hélicoptère ou autre engin volant) peut franchir de grandes distances. Le rayon d'action d' Ingenuity a été volontairement limité à un kilomètre car il s'agissait d'un prototype. Un hélicoptère plus lourd pourrait franchir plusieurs dizaines de kilomètres. Ce changement d'échelle permettrait de lancer une exploration exhaustive de la planète Mars, d'explorer les calottes polaires de Mars ou d'étudier l'immense canyon de Valles Marineris. La surface de la planète Mars a été photographiée avec une résolution spatiale moyenne par les satellites placés en orbite basse comme MRO et quelques sites ont été photographiés de manière détaillées par les astromobiles martiens. Un aérobot dispose de la capacité unique d'emporter des caméras et des instruments scientifiques permettant de pouvoir effectuer des observations à une altitude de quelques mètres et même de quelques centimètres sur l'ensemble de la planète. Enfin l'aérobot permet d'envisager une nouvelle manière d'explorer Mars grâce à sa capacité à se déplacer sans intervention humaine, son rayon d'action et sa capacité à déplacer des charges d'un endroit à un autre. Des instruments pourraient ainsi être positionnés à un endroit puis déplacés sur un autre site pour recueillir de nouvelles données[72].
Vers une mission martienne centrée sur un hélicoptère lourd ?
Sans attendre la fin des tests d'Ingenuity sur la planète Mars, la NASA a commencé à étudier une deuxième génération d'hélicoptère, capable cette fois de remplir une mission scientifique sur la planète Mars, avec une portée de 2 kilomètres entre deux recharges de ses batteries et un temps de vol maximal de 4 minutes. La principale contrainte est le volume nécessaire pour stocker les pales des rotors. Selon une étude de la NASA publiée début 2020, le véhicule de descente des missions martiennes existantes de type Pathfinder utilisé par les astromobiles MER comme Sojourner (atterrisseur de 2,5 m de diamètre intérieur) pourrait transporter un hélicoptère d'une vingtaine de kilogrammes de type hexacoptère (six rotors) capable d'emporter une charge utile (instruments scientifiques, caméras) de 2 à 3 kilogrammes. Le volume disponible dans l'étage de descente permettrait d'embarquer des équipements supplémentaires comme un système de télécommunications permettant des liaisons directes avec la Terre, des instruments scientifiques, etc[73].
Une première utilisation opérationnelle : la mission Mars Sample Return

La mission Mars Sample Return développée par la NASA en collaboration avec l'Agence spatiale européenne a pour objectif de ramener sur Terre les échantillons de sol martien prélevés par l'astromobile Perseverance. Pour remplir cet objectif la mission prévoit d'envoyer un atterrisseur, Sample Retrieval Lander (SRL), emportant un bras téléopéré permettant de récupérer les tubes contenant les échantillons de sol. Si ces derniers se trouvent hors de portée de l'atterrisseur à la suite d'une panne de Perseverance, SRL dispose de deux hélicoptères hélicoptères Sample Recovery Helicopter équipés d'une pince pour récupérer les tubes là où ils ont été déposés[74].
Les deux hélicoptères Sample Recovery Helicopter sont directement dérivés de l'hélicoptère Ingenuity utilisé de manière expérimentale à partir de 2021 sur le sol martien dans le cadre de la mission Mars 2020 / Perseverance dont ils reprennent l'architecture et la taille. Disposant d'un rotor de 1,2 mètres de diamètre et hauts de 52 centimètres, ils ont une masse de 2,26 kilogrammes (poids de 0,86 kilogrammes sur Mars). Ils se distinguent de Ingenuity par leur train d'atterrissage - les quatre pieds sont remplacés par des roues de 10 centimètres de diamètre et de 2 centimètres de large) qui leur permet de se déplacer sur le sol pour effectuer des déplacements courts et par la présence d'une pince articulée qui sera utilisée pour saisir les tubes d'échantillons. Leur vitesse horizontale maximale est de 5 mètres par seconde (environ 18 km/h), leur rayon d'action est de 700 mètres et l'altitude maximale est de 20 mètres. L'énergie est fournie par des panneaux solaires qui chargent des accumulateurs lithium-ion[75].
L'aérobot Dragonfly
Il est très probable que les recherches réalisées pour la conception d'Ingenuity seront utilisées pour le développement de la mission Dragonfly. Cet aérobot de type aérogire d'une masse de 450 kg doit s'envoler en 2027 à destination du plus grand satellite de Saturne Titan. Son objectif est d'effectuer de multiples vols de courte durée pour étudier la basse atmosphère et la surface de Titan. Pour disposer de suffisamment d'énergie pour fonctionner et survivre à une température moyenne de -180°C, l'engin spatial dispose d'un générateur thermoélectrique à radioisotope[76].
Notes et références
Références
- (en-GB) « Nasa to fly Ingenuity Mars helicopter in early April », BBC News, (lire en ligne, consulté le ).
- (en) Andrew J. Ball, James R.C. Garry, Ralph D. Lorenz et Viktor V. Kerzhanovichl, Planetary Landers and entry Probes, Cambridge University Press, (ISBN 978-0-521-12958-9), p. 56-61.
- (en) Larry Young, E.W. Aiken, Virginia Gulick, Rocco Mancinelli et Geoffrey Briggs, Rotorcraft as Mars Scouts, vol. 1, 1 er février 2002, 1–378 vol.1 (ISBN 978-0780372313, DOI 10.1109/AERO.2002.1036856, lire en ligne).
- (en) Håvard Fjær Grip, Wayne Johnson, Carlos Malpica, Daniel P. Scharf, Milan Mandić, Larry Young, Brian Allan, Bérénice Mettler et Miguel San Martin, « Flight Dynamics of a Mars Helicopter » [PDF], sur rotorcraft.arc.nasa.gov.
- (en) NASA (trad. Un hélicoptère martien volera sur la prochaine mission d'un rover de la NASA sur la planète rouge), « Mars Helicopter to Fly on NASA’s Next Red Planet Rover Mission », NASA, .
- (en) Kenneth Chang, « A Helicopter on Mars? NASA Wants to Try », New York Times, .
- (en) Tony Greicius, « NASA's Mars Helicopter Completes Flight Tests », sur NASA, (consulté le ).
- (en) Stephen Clark, « Helicopter to accompany NASA’s next Mars rover to Red Planet », sur spaceflightnow.com, .
- (en) « Alabama High School Student Names NASA's Mars Helicopter », NASA, .
- (en) Gary M Ortiz, « NASA Chooses Helicopter for Mars Drone », sur UAS Vision, .
- (en) Gary M Ortiz, « Mars 2020 Helicopter Landing Gear Dynamics » [PDF], sur Jet Propulsion Laboratory, .
- Mars Helicopter Technology Demonstrator, p. 9-10.
- Ingenuity Mars Helicopter landing press kit, p. 25.
- Ingenuity Mars Helicopter landing press kit, p. 12.
- Mars Helicopter Technology Demonstrator, p. 8-9.
- Mars Helicopter Technology Demonstrator, p. 15.
- (en) [vidéo] Veritasium, This Helicopter Just Flew On Mars! sur YouTube, (consulté le ).
- Mars Helicopter Technology Demonstrator, p. 13-14.
- Mars Helicopter Technology Demonstrator, p. 10-13.
- (en) « Linux on Mars: How the Operating System will Support Ingenuity’s First Flight on Mars », sur Data Machines,
- (en) Håvard Grip, « What We’re Learning About Ingenuity’s Flight Control and Aerodynamic Performance », sur NASA Science Mars, NASA,
- (en) Håvard Grip, « Surviving an In-Flight Anomaly: What Happened on Ingenuity’s Sixth Flight », sur NASA Science Mars, NASA, 37 mai 2021
- (en) Bob Balaram, « When Should Ingenuity Fly? », sur Blog Ingenuity, NASA, .
- (en) « NASA's Mars Helicopter Reports In », sur NASA, .
- (en) Stephen Clark, « Mars rover deploys Ingenuity helicopter for historic flight », sur blog Ingenuity, .
- (en) « Mars Helicopter Flight Delayed to No Earlier than April 14 », sur blog Ingenuity, .
- (en) « Work Progresses Toward Ingenuity’s First Flight on Mars », sur blog Ingenuity, .
- Ingenuity Mars Helicopter landing press kit, p. 18-21.
- Ingenuity Mars Helicopter landing press kit, p. 21--22.
- (en) « NASA's Mars Helicopter to Make First Flight Attempt Sunday », NASA,
- « L’hélicoptère Ingenuity décolle de Mars, le premier vol motorisé sur une autre planète », sur nouvelobs.com, L'Obs, (consulté le ).
- Tony Greicius, « NASA’s Ingenuity Mars Helicopter Logs Second Successful Flight », sur NASA, (consulté le )
- (en) « We Are Prepping for Ingenuity's Third Flight », .
- (en) « NASA’s Ingenuity Mars Helicopter Flies Faster, Farther on Third Flight », .
- (en) Kenneth Chang, « NASA’s Mars helicopter flies again and gets a new mission – Ahead of a successful fourth flight, the agency announced that Ingenuity would continue to fly beyond its original month long mission. », sur The New York Times, (consulté le )
- (en) mars.nasa.gov, « Ingenuity completes its fourth flight », sur mars.nasa.gov (consulté le )
- « Espace : les premiers enregistrements sonores du vol d’Ingenuity sur Mars », Le Monde.fr, (consulté le )
- « Espace. La Nasa parvient à enregistrer le son produit par son hélicoptère Ingenuity sur Mars », Courrier international, (consulté le )
- Mike Wall, « NASA's Mars helicopter Ingenuity lands at new airfield after 5th flight », Space.com, (consulté le )
- « NASA's Ingenuity helicopter to begin new demonstration phase », sur NASA, (consulté le )
- Håvard Grip (trad. « Survivre à une anomalie en vol: ce qui s'est passé lors du sixième vol d'Ingenuity »), « Surviving an In-Flight Anomaly: What Happened on Ingenuity’s Sixth Flight », sur NASA's Mars Exploration Program, (consulté le )
- (en) NASA/JPL (trad. Images depuis le rover Persévérance), « Images from the Mars Perseverance Rover », sur mars.nasa.gov (consulté le )
- (en) NASA/JPL (trad. Aperçu du vol 7 d'Ingenuity), « Ingenuity Flight 7 Preview », sur mars.nasa.gov (consulté le )
- (en) NASA/JPL (trad. Encore un autre vol réussi), « Another successful flight », sur Twitter (consulté le )
- (en) « NASA JPL on Twitter », sur Twitter (consulté le )
- (en) mars.nasa.gov, « Images from the Mars Perseverance Rover », sur mars.nasa.gov (consulté le )
- Teddy Tzanetos (trad. Succès du vol 8, mises à jour du software et prochaines étapes), « Flight 8 success, software updates, and next steps », sur Mars Helicopter Tech Demo, NASA, (consulté le )
- (en) Håvard Grip, Chef Pilote & Bob Balaram, Chef Ingénieur au Jet Propulsion Laboratory de la NASA, « We’re Going Big for Flight 9 », sur mars.nasa.gov (consulté le )
- (en) mars.nasa.gov, « Images from the Mars Perseverance Rover », sur mars.nasa.gov (consulté le )
- (en) « https://twitter.com/nasajpl/status/1412092497552019458 », sur Twitter (consulté le )
- « Flight Log », sur Mars Helicopter Tech Demo, NASA (consulté le )
- Aria Bendix, « NASA's Mars helicopter nailed its 10th flight — double what engineers had hoped Ingenuity would do », sur Business Insider, (consulté le )
- (en) Teddy Tzanetos, « Aerial scouting of ‘Raised Ridges’ for Ingenuity’s flight 10 », sur Status #316, NASA/JPL, (consulté le )
- Tariq Malik, « NASA's Mars helicopter soars past 1-mile mark in 10th flight over Red Planet », Space.com, (lire en ligne)
- (en) Josh Ravich, « North-By-Northwest for Ingenuity’s 11th Flight », sur Status #318, NASA/JPL, (consulté le )
- (en) « #MarsHelicopter has safely flown to a new location! », sur Twitter (consulté le )
- (en) Teddy Tzanetos (trad. : Meilleur à la douzaine – Ingenuity entame son douzième envol), « Better by the dozen – Ingenuity takes on flight 12 », Status #321, NASA/JPL, (consulté le )
- Eric Berger (trad. : Après une douzaine de vols, l'hélico de la NASA n'a pas encore eu de pépin), « After a dozen flights, NASA’s chopper has yet to come a cropper », Ars Technica, (consulté le )
- (en) NASA (trad. : Treize, un nombre porte bonheur – Ingenuity volera plus bas pour des images plus détaillées lors de son prochain vol), « Lucky 13 – Ingenuity to get lower for more detailed images during next flight », sur mars.nasa.gov (consulté le )
- (en) Håvard Grip, « Flying on Mars Is Getting Harder and Harder », sur NASA Science - Mars Helicopter Science Demo,
- (en) mars.nasa.gov, « Solar conjunction | Mars in our night sky », sur NASA’s Mars Exploration Program (consulté le )
- (en) Jaakko Karras, « 2,800 RPM Spin a Success, but Flight 14 Delayed to Post Conjunction », sur NASA Science - Mars Helicopter Science Demo,
- (en) NASA/JPL, « Flight 14 Successful », sur NASA Science - Mars Helicopter Science Demo,
- (en) David Agle, « NASA’s Ingenuity in Contact With Perseverance Rover After Communications Dropout », sur NASAScience - Mars Helicopter Science Demo,
- (en) Teddy Tzanetos, « Ingenuity Adapts for Mars Winter Operations », sur NASAScience - Mars Helicopter Science Demo,
- (en) Håvard Grip, « Keeping Our Sense of Direction: Dealing With a Dead Sensor », sur NASAScience - Mars Helicopter Science Demo,
- (en) « Ingenuity Postpones Flights Until August », sur NASAScience - Mars Helicopter Science Demo,
- (en) Teddy Tzanetos, « Ingenuity Team Spun Up for Upcoming Flight 30 », sur NASAScience - Mars Helicopter Science Demo,
- (en) Travis Brown, « Perseverance's Four-Legged Companion is Ready », sur NASAScience - Mars Helicopter Science Demo,
- (en) Travis Brown, « Status updates - The Race Is On », sur NASAScience - Mars Helicopter Science Demo,
- « Flight Log », sur Mars Helocopter Tech Demo, NASA (consulté le )
- (en) Bob Balaram, « Mars Helicopters - The 4R's », sur Mars Science- Mars Helicopter Tech Demo, NASA (consulté le )
- (en) Withrow-Maser Shannah, Koning, Witold, Kuang, Winnie et Johnson, Wayne R, « Recent Efforts Enabling Martian Rotorcraft Missions », Papier de conférence, , p. 1-10 (lire en ligne).
- (en) « Spacecraft › Sample Retrieval Lander », sur Mars Sample Return Mission (NASA), NASA (consulté le )
- (en) « Spacecraft › Sample Recovery Helicopters », sur Mars Sample Return Mission (NASA), NASA (consulté le )
- (en) Jason W. Barnes, Elizabeth P. Turtle, Melissa G. Trainer, Ralph D. Lorenz, Shannon M. MacKenzie, Carolyn M. Ernst, Caroline Freissinet, Kevin P. Hand, Alexander G. Hayes, William B. Brinckerhoff, Morgan L. Cable et al., « Science Goals and Objectives for the Dragonfly Titan Rotorcraft Relocatable Lander », The Planetary Science Journal, vol. 2, no 4, , p. 130 (DOI 10.3847/psj/abfdc, lire en ligne)
Bibliographie
- (en) J. (Bob) Balaram et al. « Mars Helicopter Technology Demonstrator » (8–12 janvier 2018) (lire en ligne) [PDF]
—2018 AIAA Atmospheric Flight Mechanics Conference — Caractéristiques techniques détaillées, description des études et des tests effectués. - (en) NASA, Ingenuity Mars Helicopter landing press kit, NASA, , 33 p. (lire en ligne [PDF]) — Dossier de presse de la NASA sur l'hélicoptère Ingenuity.
- (en) Andrew J. Ball, James R.C. Garry, Ralph D. Lorenz et Viktor V. Kerzhanovichl, Planetary Landers and entry Probes, Cambridge University Press, (ISBN 978-0-521-12958-9).
- (en) Shannah Withrow-Maser, Witold Koning, Winnie Kuang et Wayne R. Johnson, « Recent Efforts Enabling Martian Rotorcraft Missions », Papier de conférence, , p. 1–10 (lire en ligne)Étude de faisabilité d'un hélicoptère martien de deuxième génération (1re génération Ingenuity).
Voir aussi
Articles connexes
- Exploration de Mars par Perseverance : déroulement des tests à la surface de Mars.
- Mars 2020 : mission au cours de laquelle l'hélicoptère est testé.
- Aérobot
- Dragonfly : aérobot qui doit explorer la lune Titan.
Vidéos
- Vidéo des tests de déploiement de l'hélicoptère sur le sol de Mars.
- Animation montrant un vol de l'hélicoptère.
Liens externes
- NASA Mars Helicopter flight log: accès direct aux données des vols d'Ingenuity