Chang'e 5
Chang'e 5 (chinois : 嫦娥五号 ; pinyin : , de Chang'e, déesse de la Lune dans la mythologie chinoise) est une sonde spatiale de retour d'échantillons lunaires de l'agence spatiale chinoise (CNSA) développée et construite par la CASC, le principal industriel chinois du secteur spatial. La mission s'inscrit dans le cadre de la troisième phase du programme chinois d'exploration lunaire (CLEP), faisant suite aux orbiteurs Chang'e 1 et Chang'e 2 ainsi qu'aux atterrisseurs Chang'e 3 et Chang'e 4. Les études sur la sonde commencent dès le lancement du programme en , puis le projet est finalement approuvé en . La mission Chang'e 5 T1 est lancée en afin de tester la capsule de rentrée et différentes manœuvres en orbite lunaire.
sonde spatiale

| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Chang'e |
| Domaine | Exploration de la Lune |
| Type de mission | Mission de retour d'échantillons |
| Statut |
Mission achevée En orbite terrestre (orbiteur) |
| Base de lancement | Wenchang |
| Lanceur | Longue Marche 5 |
| Lancement | |
|---|---|
| Insertion en orbite autour de la Lune | |
| Atterrissage à la surface de la Lune | |
| Décollage depuis la surface de la Lune | |
| Amarrage en orbite autour de la Lune | |
| Départ de l'orbite lunaire vers la Terre | |
| Atterrissage sur Terre de la capsule |
| Masse au lancement |
8 250 kg dont 3 800 kg (atterrisseur) 800 kg (module de remontée) |
|---|---|
| Propulsion | Ergols liquides |
| Masse ergols | 5 450 kg |
| Contrôle d'attitude | Stabilisé 3 axes |
| Source d'énergie | Panneaux solaires |
| PCAM | Caméra panoramique |
|---|---|
| LRPR | Radar à pénétration de sol |
| LMS | Spectromètre visible/infrarouge |
Contrairement aux sondes soviétiques de retour d'échantillons du programme Luna, la mission Chang'e 5 a recours à la complexe méthode du rendez-vous en orbite lunaire de façon similaire au programme Apollo. L'atterrisseur qui se pose à la surface de la Lune est équipé de trois instruments scientifiques afin de donner le contexte du site de prélèvement : une caméra panoramique (PCAM), un radar à pénétration de sol (LRPR) et un spectromètre visible/infrarouge (LMS). La mission atterrit au nord de l'Océan des Tempêtes sur la face visible de la Lune dans la région du Mons Rümker inexplorée jusqu'ici. Les roches qui s'y trouvent ont un âge estimé de seulement 1,2 milliard d'années, bien plus jeunes que les échantillons rapportées par les missions des programmes Apollo et Luna datées d'entre 3,1 à 4,4 milliards d'années. Leur étude doit permettre de mieux comprendre la géologie lunaire, sa chronologie et les derniers évènements volcaniques à sa surface.
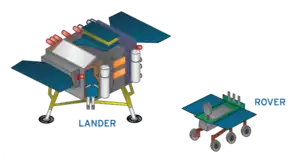
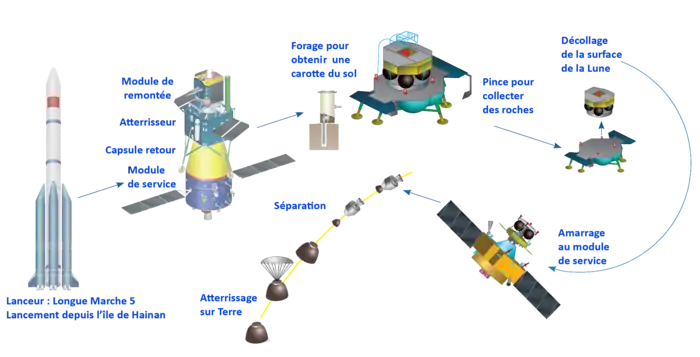
Chang'e 5, d'une masse totale de 8,2 tonnes, est constitué de quatre modules : l'orbiteur, l'atterrisseur, le module de remontée et la capsule de retour. La mission décolle le depuis la base de lancement de Wenchang sur l'île d'Hainan à bord du lanceur lourd Longue Marche 5. La sonde est injectée en orbite de transfert vers la Lune, puis l'orbiteur freine pour placer les quatre modules en orbite lunaire le . L'atterrisseur se sépare le puis se pose sur la Lune le . Un bras robotique et une foreuse prélèvent jusqu'à un maximum de 4 kilogrammes d'échantillons et jusqu'à 2 mètres de profondeur, puis les transfèrent dans le module de remontée. Ce dernier décolle le et s'insère en orbite autour de la Lune. Il effectue un rendez-vous spatial et s'amarre automatiquement avec l'orbiteur le , les échantillons sont ensuite transférés dans la capsule de retour. Le module de remontée est séparé, puis le l'orbiteur manœuvre afin de quitter l'orbite lunaire en direction de la Terre. Après son largage puis sa rentrée atmosphérique, la capsule se pose avec succès en Mongolie-Intérieure sous parachute le , avec 1 731 grammes d'échantillons.
La Chine devient avec Chang'e 5 le troisième pays après les États-Unis et l'Union Soviétique à ramener des échantillons lunaires sur Terre. La dernière mission de ce type était la sonde soviétique Luna 24 en .
Contexte
Précurseurs : Programme Apollo et Programme Luna

Les premières missions de retour d'échantillons lunaires de l'histoire eurent lieu durant la course à l'espace à la fin des années jusqu'au milieu des années . À l'époque, les États-Unis et l'Union soviétique sont lancés dans une compétition idéologique et technologique, et la Lune y occupe vite une place centrale. Les deux superpuissances y envoient tout d'abord des sondes pour effectuer des survols (comme Luna 1 et Pioneer 4), puis s'y placer en orbite (Luna 10 et Lunar Orbiter 1) et enfin s'y poser de façon automatique (Luna 9 et Surveyor 1). Parallèlement à leurs sondes robotiques, ils développent des programmes de vol habité dont l'objectif est de poser des astronautes à la surface de la Lune et de les ramener sur Terre. Une telle architecture de mission implique par conséquent la capacité de ramener des échantillons lunaires.

Dans ce but la NASA développe durant les années 1960 le programme Apollo. Ce dernier adopte la méthode du rendez-vous en orbite lunaire afin de limiter la charge à mettre en orbite par le lanceur, bien qu'il en résulte une architecture de mission plus complexe. Ainsi la fusée Saturn V injecte en orbite de transfert vers la Lune le module de commande et de service (CSM) et le module lunaire (LM) qui se placent ensuite tous deux en orbite basse lunaire. Les deux modules se séparent, puis le LM se pose à la surface de la Lune à l'aide de son étage de descente. Une fois les opérations au sol terminées, l'étage de remontée du LM décolle de la surface et effectue un rendez-vous spatial avec le CSM en orbite lunaire. Les deux modules se séparent, puis le CSM effectue le trajet de retour vers la Terre et amerrit dans l'océan. Cette architecture de mission porte ses fruits et à 6 reprises des astronautes parviennent à se poser à la surface de la Lune et à en ramener des échantillons, pour une masse totale de 382 kilogrammes[1].
Le programme lunaire habité soviétique retient également la méthode du rendez-vous en orbite lunaire, ses trois composants étant la fusée super lourde N-1, le vaisseau Soyouz 7K-LOK et le module lunaire LK. Mais, pour diverses raisons, le programme n'aboutit pas, le lanceur N-1 échouant à quatre reprises à atteindre l'orbite. Constatant l'avance prise par les Américains, les Soviétiques décident de développer parallèlement à leur programme lunaire habité des sondes robotiques chargées de ramener des échantillons lunaires. Dans le but de simplifier l'architecture de leurs missions et d'alléger leurs sondes, ils décident que le module de remontée rentrera directement sur Terre après son décollage depuis la surface, sans passer par un rendez-vous en orbite autour de la Lune. Malgré de nombreux échecs, trois missions parviennent à ramener des échantillons de la surface lunaire : Luna 16, Luna 20 et Luna 24, pour un total de 326 grammes[2].
Programme Chang'e
L'exploration lunaire est considérée dès les années 1960 par les scientifiques chinois, mais ce n'est qu'après le succès de la sonde japonaise Hiten au début des années 1990 que l'idée d'un programme d'exploration spatiale est sérieusement envisagée, mais les dirigeants chinois donneront la priorité au plus ambitieux programme habité Shenzhou. La communauté scientifique chinoise, en particulier l'Académie Chinoise des Sciences, mèneront plusieurs études de faisabilité jusqu'à ce que le programme lunaire baptisé Chang'e (du nom de la déesse Chang'e de la mythologie chinoise) soit approuvé en . L'architecture du programme divisé en trois phases de complexité croissante est approuvée en par le premier ministre Wen Jiabao. La première phase consiste à placer un orbiteur autour de la Lune, puis s'y poser, et enfin d'en ramener des échantillons. Afin de pallier d'éventuels échecs, chaque sonde est construite en deux exemplaires[3].

La première mission du programme, Chang'e 1, décolle le depuis la base de lancement de Xichang puis se place en orbite autour de la Lune deux semaines plus tard le . La mission est un succès complet et remplit tous ses objectifs en produisant notamment la première carte de la Lune en trois dimensions, puis elle s'écrase volontairement le . Sa doublure Chang'e 2 s'envole le , puis se place en orbite autour de la Lune quatre jours plus tard. Dotée d'instruments plus performants, elle remplit ses objectifs et permet de cartographier avec précision le site envisagé pour le premier atterrissage du programme, en plus de tester des manœuvres simulant une descente vers la surface lunaire. Elle quitte ensuite l'orbite de la Lune le pour se rendre au point de Lagrange L2 du système Terre-Soleil. Elle manœuvre de nouveau pour se placer dans une orbite héliocentrique avant de survoler l'astéroïde (4179) Toutatis le [4].
La première mission de la deuxième phase du programme, Chang'e 3, décolle le à bord d'une Longue Marche 3B, le plus puissant lanceur chinois à l'époque, puis se pose avec succès dans la Mer des Pluies le . Il s'agit alors du premier atterrissage sur la Lune depuis la sonde soviétique Luna 24 en . L'atterrisseur déploie un petit astromobile, Yutu, qui explore la surface lunaire durant un mois avant d'être immobilisé par une panne[5]. La doublure de la mission ayant déjà été construite, il est décidé de s'en servir pour accomplir le premier atterrissage de l'histoire sur la face cachée de la Lune. Cela est rendu difficile par l'impossibilité d'établir un lien de télécommunication direct avec la Terre, un problème que les ingénieurs chinois contourneront en plaçant un satellite relai, Queqiao, en orbite autour du point de Lagrange L2 du système Terre-Lune. Chang'e 4 décolle le , puis atterrit avec succès le dans le cratère Von Karman, déployant ensuite le rover Yutu 2[6].
Conception et construction de la sonde spatiale
Démarrage du projet

Les premières études commencent dès le lancement du projet en , alors que la Chine n'a encore lancé aucune sonde spatiale. Le scénario initialement préféré par les ingénieurs chinois est celui du retour direct sur le modèle des sondes soviétiques Luna de retour d'échantillons. Ces dernières avaient recourt à une trajectoire particulière qui permettait à l'étage de remontée, à l'aide d'un décollage depuis la surface lunaire très précis, d'effectuer le voyage de retour vers la Terre sans nécessiter de manœuvres de correction de trajectoire durant le transit. Cette méthode permet de gagner en masse et en simplicité, au prix d'un choix très restreint des sites d'atterrissage possibles, en raison des critères mathématiques de la trajectoire de retour à satisfaire. Les ingénieurs chinois décidèrent plutôt d'opter pour la méthode du rendez-vous en orbite lunaire, une architecture de mission similaire à celle adoptée par les Américains et les Soviétiques dans leur programme habité lunaire dans les années 1960. Cette technique a l'avantage de permettre un atterrissage à n'importe quel point de la surface lunaire (y compris les pôles), de ramener un échantillon plus conséquent et de développer des technologies utilisables a posteriori pour une mission habitée ou un retour d'échantillon martien. La mission est formellement approuvée par le gouvernement le pour un coût estimé de 2,5 milliards d'euros[7]. Le projet est supervisé par l'Administration d'État pour la Science, la Technologie et l'Industrie de la Défense nationale (SASTIND) via l'Administration spatiale nationale chinoise (CNSA)[8]. Comme pour toutes les sondes spatiales chinoises, la conception et la construction de la mission sont confiées à la Société de sciences et technologies aérospatiales de Chine (CASC) via ses trois filiales dédiées à la recherche et au développement des engins spatiaux. Ainsi l'Académie chinoise de technologie des lanceurs (CALT) est chargée de fournir la fusée Longue Marche 5 (alors encore en développement à l'époque)[9], tandis que l'Académie chinoise de technologie spatiale (CAST) devient le contractant principal de la sonde. Le développement et la construction de l'orbiteur et du système d'amarrage avec l'étage de remontée sont confiés à l'Académie de Shanghai pour la technologie des vols spatiaux (SAST)[10] - [11].
La mission de test Chang'e 5 T1
Les composants de Chang'e 5 sont séparément testés au sol ou validés par des missions précédentes employant des technologies similaires (comme le succès de l'atterrissage de Chang'e 3, par exemple). Mais la capsule de retour des échantillons devra employer la méthode de la rentrée par ricochets qui consiste à rebondir sur l'atmosphère lors de la rentrée atmosphérique afin de diminuer plus graduellement la vitesse et de limiter l'échauffement du bouclier thermique. Une telle manœuvre n'ayant encore jamais été accomplie en Chine, la SASTIND annonce en qu'une mission dénommée Chang'e 5 T1 (pour Test 1) doit décoller en afin de la valider en situation réelle. La sonde réutilise tout comme Chang'e 1 et 2 la plateforme d'un satellite DFH-3 sur laquelle est fixée la capsule de rentrée, une version miniaturisée de la capsule de rentrée du vaisseau habité Shenzhou. L'ensemble a une masse de 2 450 kilogrammes au décollage, dont 1 065 kilogrammes d'ergols et 330 kilogrammes pour la capsule de retour. Le lancement a finalement lieu plus tôt que prévu, le à bord d'une fusée Longue Marche 3C depuis la base de lancement de Xichang. La sonde est injectée dans une trajectoire de retour libre, puis survole la Lune trois jours plus tard le à 11 300 kilomètres d'altitude, avant de retourner en direction de la Terre. Alors que la sonde se trouve à 5 000 kilomètres de cette dernière le , la capsule de rentrée est larguée à 21h53 UTC, puis commence sa rentrée atmosphérique à 22h12 UTC. Le rebond sur l'atmosphère se passe comme prévu, la capsule reprenant de l'altitude, avant de retomber une nouvelle fois vers la Terre. Elle atterrit finalement en Mongolie-Intérieure à 22h42 UTC. La mission est un succès complet, faisant de la Chine le troisième pays après les États-Unis et l'Union soviétique à effectuer une mission aller-retour vers la Lune[12].
Après avoir largué la capsule de retour, la plateforme de la sonde manœuvre afin de contourner la Terre et de prolonger sa mission. Elle survole de nouveau la Lune le afin d'effectuer une assistance gravitationnelle qui lui permet de se placer en orbite autour du point de Lagrange L2 du système Terre-Soleil. La mission ne s'achève pas là et la sonde manœuvre de nouveau pour se placer dans une orbite basse circulaire de 200 kilomètres d'altitude autour de la Lune le . Par la suite, la mission pratique différents tests, simulant des phases de la mission Chang'e 5, telles que l'insertion en orbite lunaire du module de remontée et l'amarrage entre ce dernier et l'orbiteur. Elle permet également de photographier avec une grande précision (jusqu'à 1 mètre de résolution) de potentiels sites d'atterrissages pour de futures missions, en plus d'étudier le champ de gravitation de la Lune[13].
Développement de la sonde
La sonde s'appuie beaucoup sur les technologies développées pour les précédentes missions du programme, notamment le système d'atterrissage de Chang'e 3 et 4. De plus, des analystes ont constaté que ces atterrisseurs étaient plus grand que nécessaire pour les rover Yutu et Yutu 2 de 140 kilogrammes, les ingénieurs chinois les ayant probablement surdimensionnés afin qu'ils puissent ensuite être reconfigurés pour les missions de retour d'échantillon emportant un lourd étage de remontée[14]. La capsule de retour est quant à elle testée à partir de avec des essais de largage. L'orbiteur et le module de remontée ont recours à un nouveau moteur de 3 000 newtons de poussée qui est testé pour la première fois en . Il est mis à feu 37 fois avec succès à la fin du mois de . Par la suite, en , une série de tests des moteurs principaux de l'atterrisseur et du module de remontée sont conduits sur une période de 9 jours, avant que les deux modules soient finalement approuvés à la fin du mois de mars. Durant l'été une nouvelle série de tests a lieu, comprenant des essais de mise à feu des propulseurs d'attitude dans une chambre à vide, un test de la descente de l'atterrisseur suspendu à un portique afin de simuler la gravité lunaire, et un test du système de séparation entre la sonde et la fusée[15]. Lors du décollage depuis la surface lunaire, le moteur principal du module de remontée doit s'allumer alors qu'il se trouve juste au-dessus de l'atterrisseur. Le peu d'espace pour l'échappement des gaz rend cette phase complexe, c'est pourquoi elle est testée avec succès de juin à dans une chambre à vide simulant les conditions à la surface de la Lune[16]. Les capteurs utilisés pour l'amarrage automatisé en orbite lunaire entre le module de remontée et l'orbiteur, des versions miniaturisées de ceux employés pour le programme habité, comprenant des lidar et senseurs à micro-onde, passent leur tests d'étalonnage en . Le bras robotique est livré en . La foreuse de l'atterrisseur est testée sur différents matériaux dont cinq basaltes de haute densité, ainsi des briques de grès et d'argile simulant les roches susceptibles d'être rencontrées. Elle est également testée dans une chambre à vide, sans air pour dissiper la chaleur, le foret y atteint une température de 250 °C en 4 minutes. De telles conditions l'exposant à un risque de rupture, il est décidé de limiter la vitesse de forage à 120 tours par minute avec des pauses régulières de 5 minutes[15].
Report à cause de l'échec de la CZ-5
Une version de test du lanceur lourd Longue marche 5 fait pour la première fois le trajet de son bâtiment d'assemblage à son pas de tir le avec une maquette de la sonde Chang'e 5 sous la coiffe[17]. Mais le le deuxième vol de la fusée se solde par un échec, alors que le lancement de Chang'e 5 était prévu plus tard dans l'année. Le lanceur étant indispensable à la mission, le décollage de la sonde subit un retard de trois ans, le temps d'identifier le problème et de conduire de nouveaux vols d'essais[18]. Le la CASC annonce que la sonde Chang'e 5 — qui est complète depuis — décollera fin octobre[19].
Objectifs
Chang'e 5 se repose en partie sur les technologies développées pour les précédentes sondes du programme Chang'e, en particulier pour sa seconde phase dédiée à l'atterrissage sur la Lune. Il s'agit cependant de la première mission de retour d'échantillons chinoise et elle constitue à ce titre la mission la plus complexe et la plus ambitieuse du programme. Les nouvelles technologies développées pour sa réalisation gravitent essentiellement autour de la phase de collecte, de rendez-vous spatial et de retour sur Terre. Cela doit notamment permettre de développer par la suite des missions de retour d'échantillons depuis d'autres corps du Système solaire, comme Mars ou des astéroïdes[20].
Les objectifs technologiques de la mission sont les suivants :
- Valider la collecte d'échantillons à l'aide d'un bras robotique et d'une foreuse, le conditionnement des échantillons, le décollage depuis la surface lunaire, puis l'insertion en orbite autour de la Lune, le rendez-vous, puis l'amarrage automatique en orbite lunaire et le stockage des échantillons dans un laboratoire dédié. Faire progresser globalement les technologies de l'aérospatiale en Chine.
- Accomplir la première mission chinoise de collecte et de retour d'échantillons d'un autre corps céleste que la Terre, promouvoir le développement de la science et des technologies en Chine.
- Améliorer de façon globale les systèmes, les technologies et le savoir-faire mis en œuvre dans l'exploration lunaire chinoise, fournir une base au développement d'un programme lunaire habité et à des missions d'exploration du Système solaire.
Les objectifs scientifiques de la mission sont les suivants :
- Relever la topographie du site d'atterrissage et y conduire des analyses de la surface lunaire, établir le lien entre les données obtenues in-situ par la sonde et celles issues de l'étude en laboratoire sur Terre des échantillons ramenés.
- Contribuer à la recherche sur la structure, les propriétés physiques et la composition du sol lunaire, permettre d'approfondir les connaissances sur l'origine et l'évolution de la Lune[21].
Site d'atterrissage
.png.webp)
L'atterrisseur doit se poser dans la partie nord-ouest de l’Océan des Tempêtes, dans une zone majoritairement plate, située à environ 90 km au nord-est de la région du Mons Rümker, caractérisée par des roches volcaniques relativement jeunes (coordonnées : 41-45° N, 49-69° W). Cette région de la Lune n'a jusque là pas été étudiée par une mission Apollo ou robotique et aucun échantillon de sol de cette partie de la Lune n'a été retourné sur Terre. Cette région est caractérisée par de fortes concentrations de KREEP, un matériau caractérisé par l'abondance d'uranium, de thorium et de potassium. Dans cette région, l'activité volcanique est relativement récente (comparée au reste de la Lune — datation basée sur les comptages de cratères). La région explorée pourrait comporter des matériaux récents (moins de 3 milliards d'années, ce qui est sélénologiquement jeune). La région de Rümker est une des mers les plus récentes de la Lune. On sait que ses basaltes riches en titane font partie des roches lunaires les plus récentes parmi celles détenues sur Terre : elles auraient été formées il y a moins de 2,8 milliards d'années. L'objectif scientifique est de déterminer à quand remonte l'activité volcanique sur la Lune[22] - [23].

Caractéristiques techniques

La sonde spatiale Chang'e 5 comprend 4 sous-ensembles : l'orbiteur, l'atterrisseur, le module de remontée et la capsule de retour pour une masse cumulée de 8 250 kilogrammes au décollage, ce qui en fait la sonde (lunaire et planétaire) la plus lourde de l'histoire, surpassant les deux sondes soviétiques jumelles du programme Phobos. Cette masse élevée s'explique essentiellement par la présence de 5 450 kilogrammes d'ergols soit 66 % de la masse totale de l'engin spatial. Cette proportion très élevée s'explique par les nombreuses manœuvres que la sonde doit accomplir au cours de sa mission, en particulier l'insertion en orbite lunaire, l'atterrissage sur la Lune, le décollage depuis sa surface et enfin l'injection en orbite de transfert vers la Terre. La sonde utilise un total de 77 moteurs-fusées dont : 1 moteur à poussée variable de 7 500 newtons pour l'atterrisseur, 2 moteurs de 3 000 newtons pour l'orbiteur et le module de remontée, ainsi que des propulseurs de contrôle d'attitude de 150 newtons, 120 newtons, 25 newtons et 10 newtons[24].
Orbiteur
L'orbiteur de forme cylindrique est chargé des manœuvres de corrections de trajectoires pendant le transit entre la Terre et la Lune, puis de l'insertion en orbite lunaire. Après son décollage depuis la surface, le module de remontée vient s'amarrer à l'orbiteur afin de transférer les échantillons dans la capsule de rentrée. Cette dernière quitte ensuite l'orbite lunaire grâce à l'orbiteur, ici chargé de l'injection dans l'orbite de transfert en direction de la Terre. Il dispose d'un moteur principal à ergols liquides d'une poussée constante de 3 000 newtons, ainsi que de 2 ailes symétriques comportant chacune 3 panneaux solaires fournissant l'énergie. Ces deux caractéristiques en font un engin semblable à l'orbiteur de la sonde martienne Tianwen-1. Il dispose également de moyens de télécommunication afin de transmettre au contrôle au sol ses télémesures et de recevoir des commandes, ainsi que de petits propulseurs pour contrôler son attitude. En configuration de lancement, l'orbiteur est fixé sur le dernier étage de la fusée, il comporte de plus un adaptateur en forme de cône tronqué sur sa face supérieure qui fait la jonction avec l'atterrisseur[25]. Après l'amarrage avec le module de remontée en orbite lunaire, un mécanisme composé de deux bras robotiques est chargé de transférer le conteneur des échantillons dans la capsule de retour. Le conteneur est guidé par des rails tandis que les bras s'agrippent à des crans en forme de triangle inversé sur le flanc du conteneur, empêchant ce dernier de faire marche arrière. Les bras robotiques répètent leur mouvement 4 fois afin de compléter le transfert du conteneur[26].
Caractéristiques générales

L'atterrisseur est l'élément chargé de se poser à la surface de la Lune avec le module de remontée. Il reprend une architecture et des caractéristiques très similaires aux atterrisseurs mis en œuvre par les missions Chang'e 3 et Chang'e 4 qui l'ont précédé. D'une masse à sec d'une tonne, il pèse 3,8 tonnes avec les ergols. Pour se poser à la surface de la Lune, il utilise un moteur-fusée à ergols liquides principal dont la poussée peut être modulée entre 1 500 et 7 500 newtons. De cette manière il fonctionne en continu durant la descente vers la surface lunaire en diminuant progressivement sa poussée afin de maintenir une décélération constante compte tenu de l'allégement progressif de l'engin spatial dû à la consommation des ergols. Le contrôle d'attitude repose sur 28 petits propulseurs d'une poussée de 10 et 150 newtons. L’énergie est fournie par deux panneaux solaires déployables et repliables à la demande, notamment pour les protéger des projections de poussières lunaire lors de l'atterrissage qui pourraient les endommager. Une centrale à inertie est chargée de donner l'orientation de la sonde, tandis que durant la descente vers la surface lunaire l'ordinateur de bord utilise pour le guidage un altimètre laser, un altimètre à micro-onde, des caméras et un capteurs laser imageant le sol en trois dimensions, afin d'analyser la surface et de repérer les obstacles[27]. La précision de l'atterrissage est de 700 mètres. L'atterrisseur est conçu pour fonctionner dans des conditions proches du milieu de la journée lunaire, lorsque l'ensoleillement lui procure suffisamment d'énergie via ses panneaux solaires[25]. Contrairement aux atterrisseurs Chang'e 3 et Chang'e 4, il n'est pas équipé de source de chaleur radioactive ou d'un générateur thermoélectrique à radio-isotope et n'est donc pas conçu pour survivre à la nuit lunaire[28].
Système de prélèvement
Une fois posé, l'atterrisseur dispose d'un bras robotique télécommandé à 4 degrés de liberté de 3,6 mètres de long et d'une masse de 22 kilogrammes. Il est conçu pour fonctionner malgré la température à la surface lunaire qui dépasse les 100 °C et sa précision de positionnement est de 2 millimètres. Une caméra télescopique est positionnée sur le deuxième segment du bras afin de suivre les opérations. L'extrémité du bras est équipée de deux systèmes de prélèvement d'échantillons distincts, dits échantillonneurs A et B. Ils sont placés dos à dos sur un plateau de sorte que le bras fait pivoter sa dernière articulation pour placer l'un ou l'autre des échantillonneurs au contact du régolithe lunaire. L'échantillonneur A dispose d'une pelle rotative pour creuser un sol meuble, qui fonctionne de concert avec une autre pelle télescopique pour recueillir des échantillons superficiels. Leurs mouvements respectifs sont obtenus à l'aide de deux moteurs indépendants. Placées l'une contre l'autre les deux pelles permettent de contenir les échantillons et d'ainsi les transférer dans le conteneur. L'échantillonneur B a une forme cylindrique avec 8 pétales rétractables qui en position déployée forment une demi-sphère. Lors d'un prélèvement, les pétales sont en position ouverte et le cylindre est appliqué contre la surface. Un moteur fait tourner le cylindre sur lui-même, creusant le sol à l'aide de l'extrémité des pétales qui dépassent des bords du cylindre. Une fois enfoncé à son maximum, les pétales se déploient pour contenir le prélèvement, puis les échantillons sont transférés dans le conteneur. Un piston est chargé de pousser le prélèvement vers l'extérieur pour vider le cylindre. Deux caméras sont installés parallèlement à chaque échantillonneur afin de suivre les opérations de prélèvement[29]. Après chaque prélèvement, les échantillons sont transférés dans un conteneur situé sur l'atterrisseur à proximité du bras robotique. Lorsque les prélèvements sont terminés, le bras robotique à l'aide de l'échantillonneur A extrait le conteneur du corps de l'atterrisseur et vient le placer dans le module de remontée. Le conteneur et les deux échantillonneurs sont conçus par l'Université Polytechnique de Hong Kong[30]. L'atterrisseur dispose également d'une foreuse de type rotatif à percussion, capable de prélever des carottes du sol lunaire jusqu'à une profondeur de 2 mètres. Celles-ci sont ensuite stockées dans un tube en kevlar qui est transféré dans le module de remontée[25]. Le système est capable de prélever un maximum de 4 kilogrammes d'échantillons, mais l'objectif est d'en collecter un minimum de 2 kilogrammes, dont 0,5 kilogramme par la foreuse et 1,5 kilogramme par le bras robotique[31].
Module de remontée
Le module de remontée d'une masse de 800 kilogrammes est fixé sur le pont supérieur de l'atterrisseur où il reste en sommeil jusqu'à son décollage depuis la surface de la Lune. Un mécanisme relie latéralement les deux véhicules, canal par lequel transitent l'énergie, les données, mais également les échantillons. Cette interface se détache ensuite du module de remontée et s'écarte afin de laisser le champ libre au décollage[25]. Pour ce faire il utilise un moteur principal d'une poussée de 3 000 newtons identique à celui mis en œuvre sur l'orbiteur et dispose de 20 propulseurs d'attitude pour contrôler son orientation et effectuer de petites manœuvres. Sa tuyère se trouve à seulement 20 centimètres du haut de l'atterrisseur, un petit déflecteur de flamme en forme de cône joue le rôle de carneau en contrôlant l'écoulement des gaz générés lors de l'allumage du moteur. Ce dernier est isolé du reste du module de remontée par plusieurs couches d'isolant thermique pour que sa chaleur n'endommage pas ses composants. Le module de remontée est conçu pour pouvoir décoller de la surface lunaire même avec un atterrisseur incliné à 20 degrés. Le décollage depuis la surface lunaire repose sur le système de Guidage, Navigation et Contrôle qui se base sur les données de plusieurs capteurs, à savoir des gyroscopes, accéléromètres et viseurs d'étoiles pour corriger la trajectoire. Il est conçu pour gérer différentes situations d'urgence, comme une extinction prématurée du moteur principal, allumant dans un tel cas les propulseurs d'attitude pour compléter l'insertion en orbite[16]. Le rendez-vous orbital emploie un système miniaturisé de celui mis en œuvre dans le programme de vol habité, avec une combinaison de radar, de laser et de capteur micro-onde[27]. Le mécanisme d'amarrage passif sur le module de remontée est composé de 3 barres faisant un angle de 120° les unes avec les autres. Elles sont agrippées par 3 pinces sur le mécanisme de l'orbiteur, maintenant les deux modules fermement ensemble. Les échantillons sont ensuite transférés dans la capsule de retour[26].
Capsule de retour
La capsule de retour est fixée durant la majeure partie de la mission sur l'orbiteur, dans une cavité entre ses réservoirs d'ergols. Son architecture est très similaire à une version miniaturisée du vaisseau spatial habité Shenzhou, avec la forme en cloche caractéristique héritée des vaisseaux soviétiques Soyouz et Zond. La capsule de retour comprend un bouclier thermique chargé de la protéger de la forte chaleur générée lors de la rentrée atmosphérique, d'autant plus que cette dernière se fera à la seconde vitesse cosmique (environ 11 kilomètres/seconde). Durant cette phase la capsule dispose de propulseurs d'attitude, contrôlant de fait sa portance et donc sa trajectoire afin d'atterrir dans la zone visée. Une fois en dessous de 10 kilomètres d'altitude, elle déploie son parachute de freinage puis son parachute principal, indiquant à l'aide d'un balise sa position aux équipes au sol chargées de la récupérer[25].
Instruments scientifiques
L'atterrisseur emporte trois instruments scientifiques devant être mis en œuvre une fois posé sur la Lune, tous chargés de guider le prélèvement des échantillons et d'apporter des éléments de contexte géologique[32].
- PCAM (Panoramic Camera) est une caméra panoramique stéréoscopique (c'est-à-dire qu'elle est capable de faire des photographies en trois dimensions), similaire à celles embarquées sur les missions Chang'e 3 et 4. Elle est composée de deux systèmes optiques montés parallèlement sur une plateforme rotative. Une fois l'atterrisseur posé, l'instrument doit photographier la topographie de la surface lunaire et la structure géologique environnante afin d'apporter des éléments de contexte aux échantillons prélevés[33].
- LRPR (Lunar Regolith Penetrating Radar) est un radar à pénétration de sol Ultra wideband (UWB), chargé d'analyser l'épaisseur et la structure du régolithe lunaire du site d'atterrissage, ainsi que de guider les opérations de forage et de prélèvement des échantillons. L'instrument est composé d'un boîtier électronique contenant le contrôleur, le transmetteur, le récepteur et l'unité de distribution, ainsi que d'un réseau d'antennes. Ce dernier utilise 12 antennes Vivaldi séparées les unes des autres de 12 centimètres, formant ainsi un réseau d'une longueur d'1,6 mètre situé de part et d'autre de la foreuse, sous l'atterrisseur. L'instrument a une largeur de bande allant de 0,5 à 4 GHz avec une fréquence centrale de 2 GHz. Il est capable de sonder le sol à une profondeur de plus de 2 mètres pour une résolution d'environ 5 centimètres. L'instrument consomme 15 watts de puissance électrique et a une masse de 3,1 kilogrammes[34] - [35].
- LMS (Lunar Mineralogical Spectrometer) est un spectromètre fonctionnant dans le visible et le proche infrarouge chargé d'analyser la composition minéralogique de l'environnement direct de l'atterrisseur afin d'aider à la sélection du site de prélèvement. Les spectres récoltés sur place seront ensuite comparés à ceux obtenus à partir des échantillons ramenés sur Terre. L'instrument comporte deux modules : un premier, fonctionnant dans le visible et le proche infrarouge (de 479 à 955 nm) d'une résolution spectrale comprise entre 2,4 et 9,4 nm, et un autre, dédié à l'infrarouge (de 896 à 3 212 nm) d'une résolution spectrale comprise entre 7,6 à 24,9 nm. Les deux modules ont un champ de vue de 4,24 × 4,24°. Une plaque d'aluminium et une autre d'or servent à l'étalonnage respectivement du premier et du second module. L'instrument consomme 16 watts de puissance électrique et a une masse de 5,6 kilogrammes[36] - [37].
Déroulement de la mission
Chang'e 5 est une sonde spatiale particulièrement lourde (8,2 tonnes), ce qui impose que son lancement soit effectué par la fusée Longue Marche 5, le plus puissant des lanceurs dont dispose la Chine. La phase de transit vers la Lune dure environ 5 jours après quoi la sonde s'insère en orbite autour de la Lune. L'atterrisseur et le module de remontée se séparent, puis effectuent un atterrissage sur la Lune, tandis que l'orbiteur et la capsule de rentrée restent en orbite lunaire. Une fois que le prélèvement a été effectué, le module de remontée décolle et effectue un rendez-vous automatique avec l'orbiteur afin de transférer les échantillons dans la capsule de rentrée. Ils se séparent, puis l'orbiteur entame le trajet de retour vers la Terre. À l'approche de cette dernière, il largue la capsule de rentrée qui effectue une rentrée atmosphérique et se pose en Mongolie-Intérieure[38].
Lancement

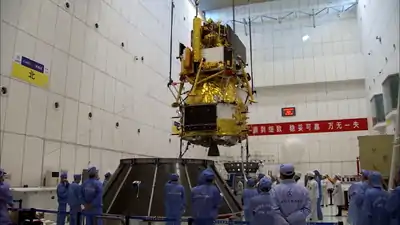
La sonde Chang'e 5 arrive par avion à la base de lancement de Wenchang en pour commencer les préparatifs[39]. Les médias d'État chinois annoncent que le lancement doit avoir lieu fin novembre, sans spécifier le jour ni l'heure. Le lanceur Longue Marche 5 est finalement transporté sur sa table de lancement depuis son bâtiment d'assemblage jusqu'à son pas de tir le , le trajet de 2,8 kilomètres durant environ 2 heures[40]. Le remplissage des réservoirs de la fusée avec l'oxygène liquide et l'hydrogène liquide cryogénique débute le à 10h30 UTC[41]. Le lancement a lieu de nuit pour plusieurs raisons : la mécanique orbitale impose des contraintes vis-à-vis de la position relative de la Terre et de la Lune ; éviter les perturbations que pourraient causer les radiations solaires sur l'électronique de la fusée ; la densité moindre de la couverture nuageuse de nuit facilite les télécommunications entre le contrôle au sol et le lanceur ; la lumière du jour pourrait "éblouir" les antennes des stations au sol, ce qui nuirait au suivi de la trajectoire de la sonde après sa séparation de la fusée[42].
Le à 20h30 UTC (T-0) la sonde s'envole à bord du sixième exemplaire de la fusée Longue Marche 5 depuis la base de lancement de Wenchang sur l'île d'Hainan. Les quatre propulseurs d'appoint apportant l'essentiel de la poussée au décollage comportent chacun deux YF-100, le seul moteur-fusée chinois brûlant du kérosène et de l'oxygène liquide. Ils se séparent de l'étage central comme prévu à T+3 minutes, puis la coiffe est larguée à T+6 minutes. La trajectoire de la fusée la conduit à survoler Luçon, la plus grande île des Philippines, les propulseurs d'appoint et la coiffe retombant dans l'océan au large de ses côtes. L'étage central cryogénique propulsé par deux YF-77 fonctionne jusqu'à T+8 minutes avant de se séparer à son tour, le deuxième étage prenant le relais. Ce qui reste de la fusée atteint finalement une orbite terrestre basse dite de parking à T+12 minutes 20 secondes. Les deux moteurs YF-75D du deuxième étage s'allument de nouveau à T+28 minutes pendant presque 7 minutes afin de procéder à l'injection trans-lunaire. Finalement la sonde se sépare du deuxième étage à T+36 minutes 25 secondes, le lancement est un succès. Les panneaux solaires de l'orbiteur se déploient à T+55 minutes, puis suivent ceux de l'atterrisseur. Ils sont disposés de façon perpendiculaire, de sorte qu'ils ne se gênent pas mutuellement[28]. L'intégralité du lancement est diffusée en direct par la télévision chinoise, notamment grâce à des caméras embarquées à bord de chacun des étages[43]. La sonde est alors dans une orbite de transfert vers la Lune, soit une orbite terrestre très elliptique de 200 × 410 000 kilomètres inclinée de 23,5° par rapport à l'équateur[44] - [45].
Transit, puis insertion en orbite lunaire
Au cours de son transit vers la Lune la sonde doit procéder à plusieurs manœuvres de correction de trajectoire ou TCM (de l'anglais Trajectory Correction Maneuver) afin de compenser certaines perturbations, telles que la pression de rayonnement provoquée par le Soleil qui pourraient causer d'importantes déviations en bout de course[46]. La première manœuvre de correction de trajectoire a lieu avec succès le à 14h06 UTC à l'aide du moteur principal de l'orbiteur de 3 000 newtons de poussée mis à feu durant 2 secondes. Cette mise à feu permet également de tester son bon fonctionnement, en prévision de la manœuvre cruciale d'insertion en orbite lunaire. L'ampleur de la correction à apporter est faible, car la précision du lancement a été meilleure que prévue. La sonde est alors dans l'espace depuis 17 heures et se trouve à 160 000 kilomètres de la Terre[47]. La deuxième manœuvre de correction de trajectoire a lieu le à 14h06 UTC lorsque l'orbiteur allume simultanément deux de ses moteurs d'attitude de 150 newtons de poussée durant 6 secondes. La sonde se trouve alors à 270 000 kilomètres de la Terre et est dans l'espace depuis 41 heures. La CNSA annonce de plus que tous les systèmes sont dans de bonnes conditions et que le suivi et les télécommunications de la sonde avec le sol se passent normalement[48] [... par le champ de gravité de la Lune]. La manœuvre dite d'insertion en orbite lunaire a lieu le à 12h58 UTC lorsque le moteur principal de l'orbiteur est mis à feu en continu durant 17 minutes. La sonde survole la Lune à une altitude de 400 kilomètres environ, 112 heures après son décollage depuis la Chine[49]. Cette manœuvre place la sonde dans une orbite elliptique qu'elle doit parcourir durant 24 heures avant de freiner une nouvelle fois pour se placer dans une orbite basse autour de la Lune. Cela est dû à la masse très importante de la sonde en comparaison de la poussée du moteur de l'orbiteur, ce qui contraint à avoir recours à deux freinage successifs[50]. La seconde manœuvre a finalement lieu le à 12h23 UTC à 400 kilomètres d'altitude[51]. La sonde s'insère dans une orbite basse circulaire de 200 kilomètres autour de la Lune, puis la séparation entre l'atterrisseur et l'orbiteur a lieu le à 20h30 UTC[52].
Atterrissage sur la Lune
La séquence d'atterrissage est très proche de celle mise en œuvre par les sondes Chang'e 3 et Chang'e 4. L'atterrisseur utilise son moteur principal pour se placer dans une orbite de 200 × 15 kilomètres, le périsélène étant positionné en amont du site visé. L'atterrisseur reste 3 jours dans cette orbite, attendant un ensoleillement favorable du site visé et analysant ce dernier à l'aide de ses capteurs embarqués. La séquence d'atterrissage commence le à 14h57 UTC lorsque l'atterrisseur allume son moteur à poussée variable au niveau du périsélène, et ce en continu durant 700 secondes dans le sens opposé à son déplacement afin de diminuer graduellement sa vitesse initiale qui était de 1,7 kilomètre/seconde. L'atterrisseur devient plus léger au fur et à mesure que les ergols sont consommés, il réduit donc la poussée de son moteur afin de maintenir une décélération constante.

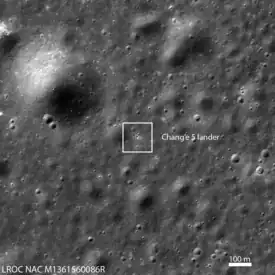
Aux alentours de 2 kilomètres d'altitude, l'atterrisseur utilise ses propulseurs d'attitude afin de changer progressivement son orientation de 90°, faisant ainsi la transition entre phase de descente horizontale et verticale. Lorsqu'il n'est plus qu'à 100 mètres d'altitude au-dessus de la surface lunaire, l'atterrisseur annule sa vitesse verticale afin d'analyser le sol à l'aide de nombreux capteurs dont une caméra optique et un capteur laser imageant le relief en trois dimensions. L'atterrisseur repère ainsi les obstacles et sélectionne un site dégagé vers lequel il se déplace horizontalement à l'aide de ses propulseurs d'attitude. Il descend ensuite verticalement à vitesse constante jusqu'à une altitude de 4 mètres. Il coupe alors son moteur principal et tombe en chute libre, les trains d'atterrissage amortissant l'impact[38] - [28]. Le contact avec le sol lunaire a lieu le à 15h11 UTC, l'atterrisseur se posant à 51,8 degrés ouest et 43,1 degrés nord, il est incliné de 2 degrés[16]. Il réalise ensuite un bilan de santé, puis déploie avec succès ses panneaux solaires et son antenne parabolique directionnelle[53].
Opérations au sol
L’atterrissage a lieu au début de la journée lunaire (d'une durée de 14 jours terrestres), lorsque la température à la surface de la Lune est optimale pour les opérations au sol. De plus, l'atterrisseur a besoin d'un bon ensoleillement, car ses systèmes de prélèvement consomment beaucoup d'énergie. Une fois posé, l'atterrisseur dispose de 48 heures pour récolter les échantillons et les transférer dans le module de remontée. Il n'est pas conçu pour résister à la baisse drastique de température liée à la nuit lunaire, et l'arrivée de cette dernière signifiera la fin de sa mission[28]. Il utilise ses instruments scientifiques, une caméra panoramique (PCAM), un radar à pénétration de sol (LRPR) et un spectromètre visible/infrarouge (LMS) pour étudier le site d'atterrissage. Les données récoltées permettent de donner le contexte géologique des échantillons et de sélectionner les sites de prélèvement les plus prometteurs sur le plan scientifique[32]. La foreuse de l'atterrisseur est la première à entrer en action, elle prélève une carotte de sol jusqu'à 2 mètres de profondeur qui est ensuite transférée dans le conteneur au sommet du module de remontée. La CNSA annonce que le forage a été réalisé avec succès le à 20h53 UTC[54].
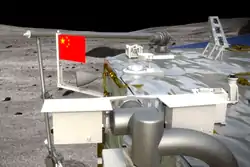
L'atterrisseur utilise son bras robotique afin de prélever du régolithe lunaire, qu'il verse ensuite dans le conteneur. Le bras est équipé de deux échantillonneurs A et B, mais l'échantillonneur B n'est finalement pas utilisé, car conçu en cas de site d'atterrissage difficile[55]. L'échantillonneur A qui se rapproche d'une pelle réalise 12 prélèvements au lieu des 15 prévus initialement, car la quantité de régolithe collectée est supérieure à celle attendue. Le prélèvement le plus rapide dure 50 minutes[56]. Un double de l'atterrisseur et de son bras robotique sont utilisés par les équipes au sol pour simuler le prélèvement et guider les opérations. De plus, la topographie de la zone d'échantillonnage est répliquée à l'identique à l'aide des images obtenus par l'atterrisseur afin de reproduire avec fidélité le contexte géologique. Le conteneur est scellé sur place pour que les échantillons ne soient pas contaminés lors du retour sur Terre, puis il est transféré par le bras robotique dans le module de remontée. Après 19 heures de travail, les opérations au sol sont terminées le à 14h00 UTC[57]. L'atterrisseur déploie également un petit drapeau de la République populaire de Chine qui est ensuite pris en photo par la caméra panoramique[58].
Décollage et rendez-vous en orbite lunaire
En préparation de l'amarrage avec le module de remontée, l'orbiteur largue l'adaptateur avec l'atterrisseur devenu inutile le à 19h46 UTC[59]. Le module de remontée décolle de la surface lunaire le à 15h10 UTC, s'insérant 6 minutes plus tard en orbite autour de la Lune à l'aide de son moteur principal de 3 000 newtons, l'atterrisseur lui ayant servi de table de lancement. C'est le premier décollage depuis un autre corps céleste que la Terre pour une mission spatiale chinoise. La lumière de la Lune empêchant le module de remontée de se repérer à l'aide de ses viseurs d'étoiles, il utilise ses capteurs internes afin de déterminer sa position et son attitude, avec le soutien de la télémesure du contrôle au sol[60]. Son orbite initiale est de 15 × 180 kilomètres autour de la Lune[38]. Le rendez-vous spatial entre l'orbiteur et le module de remontée se déroule en quatre phases, rapprochant successivement les deux modules à 50 kilomètres, 5 kilomètres, 1 kilomètre puis 100 mètres l'un de l'autre. L'amarrage est rendu difficile par la différence de masse entre les deux modules, l'orbiteur pesant encore 2,3 tonnes contre seulement 400 kilogrammes pour le module de remontée. C'est le premier rendez-vous et amarrage automatique en orbite d'un autre corps céleste que la Terre de l'histoire[61]. Le module de remontée s'amarre finalement à l'orbiteur le à 21h42 UTC. Le conteneur des échantillons est transféré dans la capsule de retour à 22h12 UTC[62].
Départ pour la Terre et transit

L'orbiteur et le module de remontée se séparent le à 4h35 UTC, ce dernier reste accroché à l'interface d'amarrage[63]. Le contrôle au sol commande finalement le à 22h59 UTC au module de remontée d'utiliser une dernière fois sa propulsion pour se désorbiter. Il s'écrase sur la Lune 30 minutes plus tard au point prévu, de coordonnées sélénographiques 0 degrés ouest et 30 degrés sud environ. Cette manœuvre permet d'éviter d'en faire un débris spatial, ce qui aurait pu affecter les futures missions lunaires de la communauté internationale[64]. Après 6 jours d'attente en orbite lunaire afin de viser une fenêtre de transfert optimale, l'orbiteur utilise de nouveau ses moteurs le à 1h54 UTC et se place dans une orbite elliptique en prévision du retour vers la Terre. Cette méthode en deux temps est semblable à celle employée lors de l'insertion en orbite lunaire deux semaines plus tôt[65]. Le à 1h51 UTC l'orbiteur s'insère finalement dans une orbite de transfert vers la Terre en allumant quatre de ses moteurs de 150 newtons durant 22 minutes. La sonde spatiale se trouve à 230 kilomètres d'altitude au-dessus de la Lune au moment de la manœuvre[66]. Comme durant le voyage aller au début de la mission, la sonde a recours à des manœuvres de correction de trajectoire afin d'ajuster sa course en direction de la Terre. La première d'entre elles a lieu le à 3h13 UTC lorsque l'orbiteur allume durant 28 secondes deux de ses moteurs de 25 newtons[67]. La deuxième manœuvre de correction de trajectoire a lieu le à 1h15 UTC, l'orbiteur utilisant deux de ses moteurs de 25 newtons durant 8 secondes[68].
Atterrissage sur Terre
Le à 17h00 UTC le contrôle au sol transmet à la sonde ses paramètres de navigation, puis la capsule se sépare de l'orbiteur à une altitude de 5 000 kilomètres au-dessus de l'océan Atlantique sud. L'orbiteur réalise ensuite une manœuvre d'évitement afin de ne pas se désintégrer dans l'atmosphère terrestre et de conduire une potentielle prolongation de mission. À 17h33 UTC la capsule débute sa rentrée atmosphérique à la deuxième vitesse cosmique, soit 11,2 kilomètres par seconde, pour une altitude d'environ 120 kilomètres au-dessus du sol[69]. Durant cette phase le bouclier thermique atteint plus de 2 000 °C tandis que la forme de la capsule génère une portance qui lui permet de contrôler sa trajectoire de rentrée[70]. Cette dernière utilise la méthode de la rentrée par ricochets : la capsule effectue une rentrée atmosphérique jusqu'à une altitude de 60 kilomètres avant de rebondir sur l'atmosphère. Elle décrit alors une parabole jusqu'à une altitude maximale comprise entre 100 et 140 kilomètres, puis retombe de nouveau et poursuit sa rentrée à une vitesse moindre. Cette méthode permet de prolonger la phase de la rentrée atmosphérique, limitant ainsi la décélération et l'échauffement du bouclier thermique[38]. À une altitude d'environ 10 kilomètres la capsule déploie son parachute, puis elle se pose finalement comme prévu dans la bannière de Siziwang en Mongolie-Intérieure le à 17h59 UTC. Les équipes au sol arrivent peu après sur le site d'atterrissage en prévision du transport par hélicoptère de la capsule vers Pékin où le conteneur des échantillons doit être extrait[69].
Extension de mission
Alors que la capsule contenant les échantillons rentre sur Terre, l'orbiteur effectue un survol de la Terre le après s'être séparé de la capsule et poursuit sa mission vers le point de Lagrange L1 du système Terre-Soleil. Il l'atteint le 15 mars 2021 après un trajet de 88 jours, en ayant effectué deux manœuvres de correction de trajectoire et deux manœuvres orbitales[71]. Il y effectue une mission de six mois avant de repartir vers la Terre en pour survoler la Lune le , se dirigeant vers une destination à l'époque inconnue[72]. L'orbiteur est placé à l'issue de son survol sur une orbite haute terrestre lui faisant faire un deuxième survol de la Lune le , et est détecté par des amateurs dans une orbite rétrograde distante (en) autour de la Lune à partir de [73].
Stockage
Le matin du une cérémonie a lieu à Pékin au siège de l'Administration spatiale nationale chinoise (CNSA), représentée par son directeur Zhang Kejiang, qui remet à cette occasion officiellement les échantillons à l'Académie Chinoise des Sciences (CAS), représentée par son président Hou Jianguo. Le conteneur est extrait de la capsule puis pesé, après quoi il est annoncé que la mission a rapporté 1 731 grammes d'échantillons[74]. La cérémonie a lieu en présence du Vice-Premier ministre de Chine Liu He[75]. Les échantillons sont ensuite transférés dans un laboratoire dédié des Observatoires astronomiques nationaux de l'Académie des sciences de Chine (NAOC). Ils y sont stockés et étudiés dans une atmosphère inerte de diazote, notamment à l'aide de microscopie optique, électronique à balayage, ou encore par spectrométrie de fluorescence des rayons X[76]. En plus de la recherche scientifique, les échantillons seront également exposés dans des musées ou offert en cadeau à des chefs d'État étrangers. Il est notamment prévu qu'ils puissent être partagés à l'international pour qu'ils soient étudiés par d'autres agences spatiales. Le directeur adjoint de la CNSA, Wu Yanhua, a cependant précisé lors d'une conférence de presse qu'en raison de la politique d'exclusion chinoise de la NASA (en) votée par le Congrès en , les États-Unis ne pourront pas recevoir d'échantillons[77].
Résultats scientifiques
Les résultats des premières études des échantillons ramenés du Mons Rümker sont publiés en octobre 2021. Une équipe de chercheurs chinois a analysé deux fragments d'une masse totale de 17,6 grammes et a déterminé leur âge : 1963 millions d'années ± 57 millions. Avant le lancement de la mission, l'âge de cette région, considérée comme la plus jeune de la Lune, était estimée par les modèles (basés sur l'inventaire des cratères) à environ 2000 millions d'années, mais certains spécialistes avançaient des âges allant de 1200 et 3200 millions d'années. Ces échantillons sont donc 1 milliard d'années plus jeunes que les roches ramenés par les astronautes du programme Apollo et les sondes spatiales soviétiques du Luna. Les résultats publiés confirment que c'est dans cette région de la Lune que s'est déroulé le dernier épisode volcanique de notre satellite au cours duquel environ 3000 km3 de basaltes se sont déversés à sa surface. Ces résultats contribuent également à valider les modèles permettant d'estimer l'âge des terrains. Par contre, l'analyse de la composition des échantillons n'a pas permis d'expliquer comment une éruption volcanique avait pu se produire à une période où la Lune était déjà géologiquement morte (trop froide pour produire des éruptions volcaniques). Une des explications avancées – une concentration locale d'isotopes radioactifs de potassium, radium et uranium ayant généré suffisamment de chaleur – n'a pas été confirmée par l'analyse des échantillons qui présentent la concentration habituelle de ces éléments chimiques dans les basaltes lunaires. Il n'y a pas non plus de concentration particulièrement élevée de KREEP. La seule différence notable par rapport aux roches basaltiques lunaires déjà analysées est une concentration plus élevée de fer et un déficit en magnésium. D'autres explications restent donc à trouver[78].
Segment sol

Deux navires de classe Yuanwang ont été positionnés dans l'océan Pacifique en amont du lancement afin d'assurer une part du relais des télécommunications et du suivi de la fusée. Environ 6 minutes après le décollage, le navire Yuanwang-6 détecte le véhicule, puis verrouille sa cible afin de transmettre les données du vol aux centres de contrôle de Wenchang et de Pékin. Le navire Yuanwang-5 prend le relais après 30 minutes de vol. Au total les deux bâtiments ont relayé les télécommunications durant 18 minutes et 20 secondes. Le navire Yuanwang-3 également déployé doit assurer une part du suivi durant le déroulement de la mission[79].
Durant le décollage une partie des télécommunications et du suivi se fait grâce à la station au sol de Kourou en Guyane, puis durant le retour sur Terre à la fin de la mission via celle de Maspalomas dans les îles Canaries, opérée par l'Institut national de technique aérospatiale, l'agence spatiale espagnole. Cela contribue à calculer avec précision la trajectoire de la capsule de retour, ce qui est déterminant pour anticiper son site d'atterrissage. Ce soutien est apporté en vertu d'un accord passé entre l'Administration spatiale nationale chinoise (CNSA) et l'Agence spatiale européenne (ESA)[80].
Suite du programme
Comme pour les deux précédentes phases du programme chinois d'exploration lunaire, une doublure de la sonde a été construite en cas d'échec de la mission. En cas de succès, cette sonde nommée Chang'e 6 doit être lancée en afin de ramener des échantillons du pôle Sud lunaire[40]. Chang'e 7 dont le décollage est prévu en est une sonde comportant un orbiteur, un satellite-relais, un atterrisseur, un rover et un robot sauteur qui doit explorer le pôle Sud de la Lune. Emportant un total de 23 instruments scientifiques, elle devra conduire une étude poussée de l'environnement lunaire et du pôle Sud, à la recherche de ressources, telles que la présence d'eau. Chang'e 8 doit également se poser au pôle Sud lunaire afin d'y conduire des expériences d'utilisation des ressources in situ (ISRU), notamment à l'aide de l'impression 3D. Ces missions doivent constituer un embryon de base lunaire robotisée, préparant le terrain et testant des technologies en vue de l'arrivée future de taïkonautes[81].
Notes et références
- Tom Lund 2018, p. 98-105
- Tom Lund 2018, p. 349-353
- Marco Aliberti 2015, p. 97-106
- Brian Harvey 2019, p. 443-459
- Brian Harvey 2019, p. 459-464
- Brian Harvey 2019, p. 1-11
- Brian Harvey 2019, p. 470-471
- Marco Aliberti 2015, p. 10-12
- Marco Aliberti 2015, p. 17-19
- (zh-CN) « 上海航天发射任务将达14-15发,嫦娥五号计划年底发射 | 航天爱好者网 », sur www.spaceflightfans.cn, (consulté le )
- (zh-CN) « 上海航天今年实施17次发射任务 为嫦娥五号研制轨道器 | 航天爱好者网 », sur www.spaceflightfans.cn, (consulté le )
- Brian Harvey 2019, p. 468-469
- Brian Harvey 2019, p. 470
- (en) Dwayne A. Day, « The Space Review: Red tortoise, blue turtle », sur www.thespacereview.com, (consulté le )
- Brian Harvey 2019, p. 472-473
- (zh-CN) « 深度丨一文解读嫦娥五号月面起飞 », sur mp.weixin.qq.com, (consulté le )
- Brian Harvey 2019, p. 82
- (en-US) Andrew Jones, « China rolls out Long March 5 rocket to launch Chang’e-5 lunar sample return mission », sur SpaceNews, (consulté le )
- (zh-CN) « 嫦娥五号10月底前后发射 计划带回1公斤以上样本 », sur www.spaceflightfans.cn, (consulté le )
- (en) « China launches Chang'e-5 to collect, return moon samples - Xinhua | English.news.cn », sur www.xinhuanet.com, (consulté le )
- (zh-CN) « 嫦娥五号探测器发射圆满成功 开启我国首次地外天体采样返回之旅 », sur www.cnsa.gov.cn, (consulté le )
- (en) Phil Stooke, « How did China decide where to land its upcoming Moon missions? », .
- (en) Long Xiao, « Farside Landing and Nearside Sample Return - China's New Lunar Missions Are on the Way », The Planetary Society, .
- (zh-CN) 索阿娣 赵聪, « 5.4吨推进剂如何注入中国史上最复杂航天器? », sur mp.weixin.qq.com, (consulté le )
- (en) Patric Blau, « Chang’e 5 Spacecraft Overview », sur spaceflight101.com (consulté le )
- (zh-CN) « 亲,小哥已完成取货,将以第二宇宙速度向你赶来 », sur mp.weixin.qq.com, (consulté le )
- Brian Harvey 2019, p. 470-473
- (zh-CN) 巅峰高地, « 嫦娥五号王者归来,就为取两公斤月球样本?载人壮志毫不掩饰 », sur zhuanlan.zhihu.com, (consulté le )
- (zh-CN) MA Ruqi, JIANG Shuiqing, LIU Bin, BAI Mei et LIN Yuncheng, « Design and Verification of a Lunar Sampling Manipulator System », 宇航学报, vol. 39, no 12, (ISSN 1000-1328, DOI 10.3873/j.issn.10001328.2018.12.001, lire en ligne, consulté le )
- (zh) « 理大為國家首個月球採樣返回任務研發太空儀器 », sur www.polyu.edu.hk, (consulté le )
- (zh-CN) « 嫦娥五号(Chang’e-5) », sur skywatcher2017.wordpress.com, (consulté le )
- (en) Long Xiao, « Farside Landing and Nearside Sample Return - China's New Lunar Missions Are on the Way », The Planetary Society,
- (en) Wei Yan, Xin Ren, Jianjun Liu et Xu Tan, « Measurement methods and accuracy analysis of Chang'E-5 Panoramic Camera installation parameters », EGU General Assembly Conference Abstracts, vol. 18, , EPSC2016–3858 (lire en ligne, consulté le )
- (en) Yuan Xiao, Yan Su, Shun Dai et Jianqing Feng, « Ground experiments of Chang’e-5 lunar regolith penetrating radar », Advances in Space Research, vol. 63, no 10, , p. 3404–3419 (DOI 10.1016/j.asr.2019.02.001, lire en ligne, consulté le )
- (en) S.X. Shen, X.L. Hua, B. Zhou et Y.X. Li, « Lunar Regolith Penetrating Radar on the Lander for Chang'E-5 Mission », 2018 17th International Conference on Ground Penetrating Radar (GPR), IEEE, , p. 1–4 (ISBN 978-1-5386-5777-5, DOI 10.1109/ICGPR.2018.8441614, lire en ligne, consulté le )
- (en) Bin Liu, Xin Ren, Wei Yan et Xuesen Xu, « Detection Capability Evaluation on Chang'e-5 Lunar Mineralogical Spectrometer (LMS) », EGU General Assembly Conference Abstracts, vol. 18, , EPSC2016–5644 (lire en ligne, consulté le )
- (en) Zhiping He, Chunlai Li, Rui Xu et Gang Lv, « Spectrometers based on acousto-optic tunable filters for in-situ lunar surface measurement », Journal of Applied Remote Sensing, vol. 13, no 2, , p. 027502 (ISSN 1931-3195 et 1931-3195, DOI 10.1117/1.JRS.13.027502, lire en ligne, consulté le )
- (zh-CN) PeiJian Ye, JiangChuan Huang, ZeZhou Sun et MengFei Yang, « The process and experience in the development of Chinese lunar probe », SCIENTIA SINICA Technologica, vol. 44, no 6, , p. 543–558 (ISSN 2095-946X, DOI 10.1360/N092014-00150, lire en ligne, consulté le )
- (zh-CN) « 嫦娥五号探测器发射成功!中国探月工程开启新篇章!-中国空间技术研究院 », sur www.cast.cn, (consulté le )
- (en-US) Andrew Jones, « China rolls out Long March 5 rocket to launch Chang’e-5 lunar sample return mission », sur spacenews.com, (consulté le )
- (zh-CN) « 长征五号遥五运载火箭加注低温推进剂 计划24日凌晨发射 », sur www.cnsa.gov.cn/, (consulté le )
- (en) Zhao Lei, « Reasons for predawn launch time explained », sur www.chinadaily.com.cn, (consulté le )
- Philippe Henarejos, « La sonde chinoise Chang’e 5 est en route vers la Lune », sur www.cieletespace.fr, (consulté le )
- (en) Deng Xiaoci et Fan Anqi, « China launches 1st lunar sample return mission, aims for multiple breakthroughs in aerospace history - Global Times », sur www.globaltimes.cn, (consulté le )
- (en-US) Thomas Burghardt, « China launches world's first lunar sample return mission since 1976 », sur www.nasaspaceflight.com, (consulté le )
- (en) « China's Chang'e-5 probe completes second orbital correction », sur news.cgtn.com, (consulté le )
- (zh-CN) « 嫦娥五号探测器完成第一次轨道修正 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器完成第二次轨道修正 », sur www.cnsa.gov.cn,
- (zh-CN) « 嫦娥五号探测器成功实施“刹车”制动 顺利进入环月轨道飞行 », sur www.cnsa.gov.cn, (consulté le )
- (en) Liu Hui, Wu Lei, Gong Zhe et Pan Zhaoyi, « China's Chang'e-5 lunar probe successfully brakes for lunar orbiting », sur news.cgtn.com, (consulté le )
- (zh-CN) « 嫦娥五号探测器再次实施制动 进入近圆形环月轨道飞行 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器组合体成功分离 将择机实施月面软着陆 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器实施动力下降并成功着陆将在预选区域开展月面采样工作 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器正按计划开展月面采样工作 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) 中国航天报, « 深度丨为了月球这抔土,嫦娥五号有多拼? », sur mp.weixin.qq.com, (consulté le )
- (zh-CN) CCTV, « 嫦娥五号探测器已进入到月面起飞准备工作中 - 河南一百度 », sur www.henan100.com, (consulté le )
- (zh-CN) « 嫦娥五号探测器完成月面自动采样封装 有效载荷工作正常 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 国家航天局公布嫦娥五号月表国旗展示照片 », sur www.cnsa.gov.cn, (consulté le )
- (en) Jonathan McDowell, « Jonathan's Space Report No. 787 », sur www.planet4589.org, (consulté le )
- (zh-CN) « 嫦娥五号上升器进入预定轨道 实现我国首次地外天体起飞 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) 中国探月工程, « 完整视频:国际首次地外天体轨道无人驾驶交会对接科普解读 », sur mp.weixin.qq.com (consulté le )
- (zh-CN) « 我国首次实现月球轨道交会对接 嫦娥五号探测器完成在轨样品转移 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器对接组合体成功分离 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号上升器受控落月 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号轨道器和返回器组合体 实施第一次月地转移入射 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号轨道器和返回器组合体实施第二次月地转移入射 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器完成第一次月地转移轨道修正 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器完成第二次月地转移轨道修正 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 嫦娥五号探测器圆满完成我国首次地外天体采样返回任务 », sur www.cnsa.gov.cn, (consulté le )
- (zh-CN) « 回家:重返地球的科技之路 », sur mp.weixin.qq.com, (consulté le )
- (zh) 中国航天科技集团, « 中国首颗!嫦娥五号轨道器进入日地L1点探测轨道 », sur mp.weixin.qq.com (consulté le )
- (en-US) Andrew Jones, « China’s Chang’e-5 orbiter is heading back to the moon », sur spacenews.com, (consulté le )
- (en) Scott Tilley, « Chang’e 5 Returns to the Moon », sur skyriddles.wordpress.com, (consulté le )
- (zh-CN) « 嫦娥五号任务月球样品交接仪式在京举行 », sur www.cnsa.gov.cn, (consulté le )
- (en) « China's Chang'e-5: 1,731 grams of lunar samples officially handed over », sur news.cgtn.com, (consulté le )
- (en) « Moon samples collected by China's Chang'e-5 probe to be unsealed at laboratory », sur www.xinhuanet.com, (consulté le )
- (en) « China to share access to moon 'treasures' with others », sur english.nao.cas.cn (consulté le )
- (es) Daniel Marin, « Analizando las muestras de la Chang’e 5: las rocas lunares más jóvenes conocidas », sur Eureka,
- (en) « Chinese space tracking ships complete monitoring of Chang'e-5 probe launch - Xinhua | English.news.cn », sur www.xinhuanet.com, (consulté le )
- (en) « ESA ground stations support Moon missions », sur www.esa.int, (consulté le )
- (en-US) Andrew Jones, « China is moving ahead with lunar south pole and near-Earth asteroid missions », sur spacenews.com, (consulté le )
Annexes
Bibliographie
- Programme Apollo et Programme Luna
- (en) Tom Lund, Early exploration of the moon : ranger to Apollo, Luna to Lunniy Korabl, Cham/Chichester, Springer Praxis, , 381 p. (ISBN 978-3-030-02071-2, 3-030-02071-1 et 3-030-02070-3, OCLC 1080998916, lire en ligne)
- Programme spatial chinois en général
Au sujet de la Lune
Au sujet de l'exploration de la Lune
- Exploration de la Lune
- Mission de retour d'échantillons
- Programme Luna, programme de sonde robotique lunaire mené par l'Union Soviétique de à
- Programme Apollo, programme de vol habité lunaire mené par la NASA de à
- Programme Artemis, programme de vol habité lunaire mené par la NASA à partir de
Au sujet du programme spatial de la Chine
- Programme spatial de la Chine
- Programme chinois d'exploration lunaire
- Chang'e 5 T1, sonde lunaire chinoise qui survola la Lune en 2014 et testa la capsule de rentrée
- Chang'e 4, sonde lunaire chinoise qui effectua le premier atterrissage sur la face cachée de la Lune en
Lien externe
- (en) Chang'e 5 sur le site Spaceflight101
- « La Lune, plus volcanique qu'on ne l'aurait pensé » sur le site du journal Le Temps