Surveyor 1
Surveyor 1 est la première sonde lunaire du programme Surveyor, de la NASA, conçue pour explorer la Lune. Le programme est géré par le Jet Propulsion Laboratory (JPL), et utilise des véhicules spatiaux conçus et construits par la compagnie Hughes Aircraft. Elle est lancée le et se pose avec succès le 2 juin 1966 sur l'océan des Tempêtes. Il s'agit du premier atterrissage en douceur sur la Lune par les États-Unis, quatre mois après celui de la sonde soviétique Luna 9 aux caractéristiques techniques et scientifiques sensiblement plus limitées. La sonde spatiale fournit des informations précieuses sur la consistance du sol lunaire qui permettent de préparer le premier atterrissage d'un engin habité sur la Lune. La sonde transmet en tout 11 240 images vers la Terre.
Sonde spatiale ( Lune )
| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Surveyor |
| Domaine | Exploration de la Lune |
| Type de mission | Atterrisseur |
| Statut | Mission terminée |
| Autres noms | Surveyor-A |
| Base de lancement | Cape Kennedy, LC-36A |
| Lancement | à 14 h 41 TU |
| Lanceur |
Atlas-Centaur (AC-10) (Atlas-D # 290 - Centaur D) |
| Fin de mission | 7 janvier 1967 |
| Durée | 63,6 heures |
| Durée de vie | 45 jours (mission primaire) |
| Identifiant COSPAR | 1966-045A |
| Protection planétaire | Catégorie II[1] |
| Masse au lancement |
995,2 kg au décollage 294,3 kg à l’atterrissage |
|---|---|
| Propulsion | Chimique |
| Ergols | Hydrate d'hydrazine |
| Contrôle d'attitude | Stabilisé sur 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 85 watts |
| Orbite | Descente directe |
|---|---|
| Atterrissage |
à 06 h 17 min 37 s TU |
| Localisation | 2,4745° S et 316,6602° E |
| Video Camera for Television | Transmission de gros plans de la surface lunaire |
|---|---|
| Strain Gauge | Jauge de contrainte |
Objectifs de la mission
Pour faire atterrir des hommes sur la lune dans le cadre du programme Apollo, la NASA a besoin de connaître la consistance du sol lunaire. À l'époque du lancement de la sonde, on ne savait ni comment le sol supporterait le poids du module lunaire Apollo, ni comment dimensionner les semelles sur lesquelles l'engin prendrait appui. Dans les hypothèses pessimistes, la sonde lunaire allait être engloutie par la poussière lunaire. Une autre information attendue est le comportement du sol lunaire vis-à-vis des ondes radar. En effet, le module lunaire doit utiliser un radar pour mesurer son altitude au-dessus du sol.
Les principaux objectifs du programme Surveyor, une série de sept vols robotiques avec atterrissage maîtrisé, doivent permettre de préparer les futurs atterrissages d'Apollo sous les aspects suivants : 1° développer et valider la technologie pour atterrir en douceur sur la Lune ; 2° fournir des données sur la compatibilité de la conception d'Apollo avec les conditions rencontrées sur la surface lunaire ; et 3° enrichir les connaissances scientifiques de la Lune.
Les objectifs spécifiques de cette mission sont de : 1° démontrer la capacité de la sonde spatiale Surveyor à effectuer avec succès des corrections de trajectoire et à réaliser un atterrissage en douceur sur la Lune ; 2° démontrer la capacité du système de communication Surveyor et du Deep Space Network à maintenir les communications avec le véhicule spatial durant son vol et après un atterrissage en douceur ; et 3° démontrer la capacité du lanceur Atlas-Centaur à injecter la sonde lunaire Surveyor sur une trajectoire d'interception lunaire.
Les objectifs secondaires sont d'obtenir des données d'ingénierie sur les sous-systèmes de véhicules spatiaux utilisés durant la trajectoire, la descente et après l'atterrissage. Les objectifs tertiaires sont d'obtenir des images de l'atterrissage d'un des pieds de la sonde, du matériau de surface qui l'entoure et de la topographie lunaire, et d'obtenir des données sur la réflectivité radar et la force portante de la surface lunaire, et sur les températures de la sonde lunaire.
Description du véhicule spatial
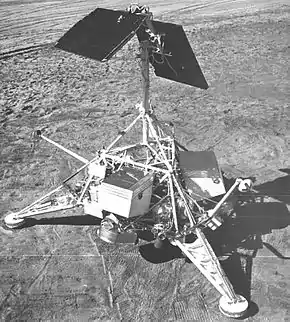
Contrairement aux atterrisseurs soviétiques Luna, Surveyor est un véritable atterrisseur, comprenant un véhicule de trois mètres de haut basé sur une structure triangulaire en aluminium à paroi mince de 27 kg avec une des trois jambes à chaque angle et un gros moteur à rétrofusée à propergol solide au centre (qui représente plus de 60% de la masse globale de la sonde lunaire). La sonde spatiale est équipée d'un système de détection de vitesse Doppler qui alimente en informations l'ordinateur de bord pour mettre en œuvre la descente contrôlée vers la surface lunaire. Chacun des trois pieds de la sonde comporte également des amortisseurs de type avion et des jauges de contrainte pour fournir des données sur les caractéristiques d'atterrissage, importantes pour les futures missions Apollo.
La structure de base de la sonde spatiale Surveyor se compose d'un trépied de tubes en aluminium à paroi mince et d'entretoises fournissant des surfaces de montage pour les systèmes d'alimentation, de communications, de propulsion, de commande de vol et de charge utile. Un mât central s'étend à environ un mètre au-dessus du sommet du trépied. Trois jambes d'atterrissage articulées sont fixées au bas de la structure. Les jambes en aluminium ont des amortisseurs et le mécanisme de verrouillage se termine par trois pieds avec amortisseurs. Les trois pieds se déploient jusqu'à 4,3 mètres du centre de la sonde Surveyor. Le véhicule spatial mesure 3 mètres de haut. Les jambes sont repliées pour s'insérer dans la coiffe de la fusée au lancement.
Une surface de 0,855 m2 de 792 cellules photovoltaïques est montée au-dessus du mât et génère jusqu'à 85 watts de puissance emmagasinée dans un accumulateur argent-zinc. Les communications sont réalisées via une antenne mobile à gain élevé montée près du haut du mât central pour transmettre des images de télévision, deux antennes omnidirectionnelles montées aux extrémités du mât pour les liaisons montante et descendante, ainsi que deux récepteurs et deux émetteurs.
Le contrôle thermique est obtenu par une combinaison de peinture blanche, de finition thermique à haute émittance infrarouge et de d'aluminium poli. Deux compartiments à contrôle thermique, équipés de couvertures super-isolantes, d'interrupteurs thermiques et de petits radiateurs électriques, sont montés sur la structure de la sonde. Un compartiment, maintenu entre 5 et 50 °C, abrite les communications et l'électronique de gestion de l'énergie. L'autre, maintenu entre −20 et 50 °C, abrite les composants de commande et de traitement du signal.
La caméra de télévision est montée près du sommet du trépied et des jauges de contrainte, des capteurs de température et d'autres instruments d'ingénierie sont intégrés dans toute la sonde spatiale. Une cible photométrique est montée près de l'extrémité d'une des jambes d'atterrissage et une autre sur une courte perche s'étendant au bas de la structure. D'autres éléments de charge utile, qui diffèrent d'une mission à l'autre, sont montés sur différentes parties de la structure en fonction de leur rôle.
Un capteur solaire, un viseur de l'étoile Canopus et des gyroscopes sur trois axes fournissent les données d'attitude. La propulsion et le contrôle d'attitude sont assurés par des jets d'azote gazeux froid durant les phases de vol, trois moteurs-fusées à vernier durant les phases propulsées, y compris l'atterrissage, et le moteur à propergol solide durant la descente finale. La rétrofusée est un boîtier sphérique en acier monté au centre de la sonde, en partie basse.
Les moteurs verniers utilisent comme carburant de l'hydrate d'hydrazine et un oxydant MON-10 (90% N2O2, 10% NO). Chaque chambre peut produire 130 N à 460 N de poussée sur commande, un moteur peut pivoter pour contrôler le roulis. Le carburant est emmagasiné dans des réservoirs sphériques montés sur la structure du trépied. Pour la séquence d'atterrissage, un radar d'altitude déclenche la mise à feu de la rétrofusée principale pour le freinage primaire. Une fois l'allumage terminé, la rétrofusée et le radar sont largués et les radars doppler et altimètre sont activés. Ceux-ci fournissent des informations au pilote automatique qui contrôle le système de propulsion vernier à l'atterrissage.
La sonde Surveyor 1 a une masse de 995,2 kg au lancement et 294,3 kg à l'atterrissage.

Description des instruments
Aucun instrument particulier pour des expériences n'est emporté, pourtant des informations scientifiques considérables sont obtenues. La sonde est équipée de deux caméras : une pour l'approche, qui n'est pas utilisée et une pour les opérations sur la surface lunaire. Plus de cent capteurs sont à bord.
Caméra de télévision
La caméra de télévision se compose d'un tube Vidicon, de deux objectifs de 25 mm et 100 mm de focale, avec obturateur, filtres et de diaphragme. L'axe de prise de vue est incliné à environ 16° par rapport à l'axe central de la sonde lunaire. La caméra est montée sous un miroir qui peut être déplacé en azimut et en élévation. Le fonctionnement de la caméra est entièrement commandé depuis la Terre. La couverture image par image de la surface lunaire est obtenue sur 360° en azimut et de 40° au-dessus du plan normal de l'axe Z de la caméra jusqu'à 65° en dessous de ce plan. Deux résolutions sont utilisées, 200 et 600 lignes.
Le mode 200 lignes transmet d'une antenne omnidirectionnelle les quatorze premières photos et numérise une image toutes les 61,8 secondes. Les transmissions suivantes sont des images de 600 lignes avec une antenne directionnelle, et chaque image est balayée toutes les 3,6 secondes. Chaque image de 200 lignes nécessite 20 secondes pour une transmission vidéo complète et une bande passante de 1,2 kHz.
Chaque image de 600 lignes nécessite une seconde (valeur nominale) pour être lue à partir du tube Vidicon et nécessite une bande passante de 220 kHz pour la transmission. Les transmissions de données sont converties en un signal de télévision standard pour la télévision en circuit fermé et la télévision publique. Les images de télévision sont affichées sur Terre sur un moniteur à balayage lent recouvert de phosphore à longue persistance. La persistance est sélectionnée pour correspondre optimalement à la fréquence d'images maximale nominale. Une trame d'identification de télévision est reçue pour chaque trame de télévision entrante et est affichée en temps réel à un débit compatible avec l'image entrante. Ces données sont enregistrées sur un magnétoscope vidéo. Plus de 10 000 photos sont prises par Surveyor 1 avant le coucher de Soleil lunaire du 14 juin 1966. Elles comprennent des panoramas grand angle, des photographies photométriques, et des images du ciel. La sonde lunaire répond aux commandes d'activation de la caméra le 7 juillet et, le 14 juillet 1966, renvoie près de 1 000 images supplémentaires.
Jauges de contrainte
Les jauges de contrainte sont montées sur l'absorbeur de chocs de chaque pied pour enregistrer les forces axiales maximales lors de l'impact à l'atterrissage de la sonde. Elles sont conçues pour une force de 800 kg.
Déroulement de la mission
La sonde Surveyor 1 est lancée le 30 mai 1966 à 14 h 41 TU sur le lanceur Atlas-Centaur (AC-10) de l'aire de lancement LC-36A de la base de lancement de Cap Kennedy sur une trajectoire directe d'impact vers la Lune. Après une correction de trajectoire à 06 h 45 TU le 31 mai, la sonde lunaire atteint la Lune environ 63 heures après son lancement. À une altitude de 75,3 km et à une vitesse de 2 612 m/s, la rétrofusée principale, alertée par le radar d'altitude, est mise à feu pour un allumage de 40 secondes et est larguée à une altitude d'environ 11 km après avoir ralenti la sonde à 110 m/s. La descente se poursuit avec les moteurs verniers sous le contrôle des radars doppler et d'altimètrie. Les moteurs sont arrêtés à une hauteur de 3,4 m au-dessus de la surface lunaire et la sonde lunaire tombe librement de cette hauteur.
Surveyor 1 atterrit sur la surface lunaire le 2 juin 1966 à 06 h 17 min 36 s TU à environ 3 m/s. Le site d'atterrissage est à 2,4745 S, 316,6602 E (déterminé à partir des images du Lunar Reconnaissance Orbiter) sur une zone plane à l'intérieur d'un cratère de 100 km, qui contient des rochers de plus d'un mètre dispersés tout autour et des montagnes à l'horizon, au nord du cratère Flamsteed dans le sud-ouest de l'océan des tempêtes (Oceanus Procellarum) à 14 km de sa cible. La première heure de Surveyor 1 sur la Lune est consacrée à des essais d'ingénierie. Des séances de photographie sont ensuite réalisées durant le reste de la journée lunaire. Les capteurs indiquent que le sol lunaire est plus ferme que ce qui était prévu. Le système de télévision transmet des images d'un des pieds de la sonde lunaire et du sol lunaire environnant et des matériaux de surface. Quelque 10 338 photos sont transmises avant la tombée de la nuit lunaire le 14 juin 1966. La sonde spatiale acquiert également des données sur la réflectivité radar de la surface lunaire, la force portante de la surface lunaire et les températures de l'engin. Surveyor 1 est capable de résister à la première nuit lunaire et près de midi le deuxième jour lunaire, le 7 juillet 1966, des photographies sont à nouveau envoyées. Le 13 juillet 1966 à 07 h 30 TU, après la transmission d'un total de 11 240 photos, la mission de Surveyor 1 est interrompue en raison d'une chute spectaculaire de la tension de l'accumulateur juste après le coucher de Soleil. L'engin continuera à être sollicité jusqu'au 7 janvier 1967. Tous les objectifs de la mission sont atteints. La mission est considérée comme un succès complet et la démonstration de la technologie nécessaire pour réaliser l'atterrissage et les opérations des missions habitées Apollo sur la surface lunaire est concluante.
Sans aucun doute, Surveyor 1 est l’une des grandes réussites du programme lunaire et interplanétaire de la NASA.
Trophée Collier de 1967
En 1967, le trophée Collier est accordé à Lawrence A. Hyland, au nom de Hughes Aircraft et de l'équipe du Jet Propulsion Laboratory de la NASA pour « la plus grande réussite en aéronautique ou astronautique en Amérique en ce qui concerne l'amélioration de la performance, de l'efficacité, et de la sécurité d'un véhicule aérien ou spatial, dont la valeur a été minutieusement démontrée par l'usage réel l'année précédente. »