Acoustique sous-marine
L'acoustique sous-marine est l'étude de la propagation du son dans l'eau et de l'interaction des ondes mécaniques constituant le son avec l'eau, son contenu et ses frontières. L'eau peut être l'océan, un lac, une rivière ou un réservoir. Les fréquences typiques de l'acoustique sous-marine sont comprises entre 10 Hz et 1 MHz. La propagation du son dans l'océan à des fréquences inférieures à 10 Hz se poursuit dans les fonds marins, tandis que les fréquences supérieures à 1 MHz sont rarement utilisées car elles sont absorbées très rapidement. L'acoustique sous-marine est parfois connue sous le terme hydroacoustique.

Ce domaine est étroitement lié à d'autres domaines d'études acoustiques, tels que le sonar, la transduction, le traitement du signal acoustique et la bioacoustique.
Histoire
Les mammifères marins utilisent le son sous-marin depuis probablement des millions d'années. L'étude de l'acoustique sous-marine commença en 1490, quand Léonard de Vinci écrivit[1] :
« Si vous forcez votre bateau à l'arrêt, placez l'extrémité d'un long tube dans l'eau et placez l'autre extrémité à votre oreille, vous entendrez les bateaux se trouvant à une grande distance. »
En 1687 Isaac Newton écrivit Philosophiae naturalis principia mathematica t. I[2] et t. II[3], qui contient le premier traité mathématique sur le son.
En 1826, Daniel Colladon, physicien suisse, et Charles Sturm, mathématicien français mesurèrent sur le lac de Genève la différence de temps d'arrivée entre un éclair de lumière et le son d'une cloche de bateau immergée en utilisant une corne d'écoute sous-marine[4] sur une distance de 17 km. Ils évaluèrent la vitesse du son à 1 435 m/s, fournissant ainsi la première mesure quantitative de la vitesse du son dans l'eau[5]. Le résultat obtenu était précis à environ 2 % de la valeur réelle.
En 1877 Lord Rayleigh écrivit La Théorie du son et établit la théorie acoustique moderne.
Le naufrage du Titanic en 1912 et le début de la Première Guerre mondiale déclenchèrent une nouvelle vague de progrès dans l'acoustique sous-marine. Des systèmes de détection d'icebergs et de sous-marins furent développés. De nombreux brevets portant sur les sonars furent déposés en Europe et aux États-Unis, jusqu'à l'echo-ranger de Reginald Fessenden en 1914. Durant cette période Paul Langevin en France et A B Wood et associés en Angleterre réalisèrent le travail de pionnier[6]. Les sonars (SOund Navigation And Ranging) actifs ASDIC et passifs furent développés pendant la guerre à partir de 1917, du fait de l'efficacité des U-Boot pour perturber l'approvisionnement maritime de l'Europe[7]. L'acoustique sous-marine conduisit notamment à développer des mines acoustiques.
En 1919 fut publié le premier article scientifique sur l'acoustique sous-marine[8], donnant un modèle mathématique de la réfraction des ondes acoustiques par les gradients de température et de salinité dans l'océan. Des mesures de pertes de propagation validèrent expérimentalement les calculs de cet article.
Les deux décennies suivantes virent le développement de plusieurs applications d'acoustique sous-marine. L'écho-sondeur fut développé commercialement pendant les années 1920. Les premiers transducteurs utilisaient des matériaux naturels, mais dans les années 1930 des transducteurs piézo-électriques réalisés en matériaux synthétiques les remplacèrent dans les systèmes d'écoute passive et les systèmes de sonars actifs, utilisés avec succès pendant la Seconde Guerre mondiale sur les sous-marins et les frégates anti sous-marines. Le livre Physics of Sound in the Sea, publié en 1946 rassemble les avancées en acoustique sous-marine de l'époque de la guerre.
Après la Seconde Guerre mondiale, la guerre froide stimula le développement des systèmes sonars, menant à des avancées dans la compréhension théorique et pratique de l'acoustique sous-marine, aidée des techniques utilisant les ordinateurs.
Théorie
Ondes acoustiques dans l'eau
Une onde acoustique se propageant dans l'eau consiste en l'alternance de compressions et de raréfactions de l'eau. Ces compressions et raréfactions sont détectées par un récepteur, comme l'oreille humaine ou un hydrophone, comme des variations de pression. Ces ondes sont d'origine humaine ou naturellement générées.
Vitesse de son, densité et impédance
La vitesse du son , appelée également célérité du son (i.e. le mouvement longitudinal du front d'ondes) est liée à la fréquence et la longueur d'onde d'une onde par la relation suivante: .




Cette grandeur diffère de la vitesse particulaire , correspondant au mouvement des molécules dans le milieu dû au son. Celle-ci s'exprime par la relation entre la pression acoustique de l'onde plane , la densité du fluide et la vitesse du son :




Le produit de la formule précédente est appelé impédance acoustique. La puissance acoustique par unité de surface est appelée intensité acoustique, et pour une onde plane l'intensité moyenne est donnée par: , où est la racine carrée de la pression acoustique.



À 1 kHz, la longueur d'onde dans l'eau est d'environ 1,5 m.
L'écart important d'impédance entre l'eau et l'air (le ratio est d'environ 3600) et le niveau de rugosité de la surface a pour conséquence que la surface de l'eau se comporte comme un réflecteur parfait du son à des fréquences inférieures à 1 kHz. La vitesse du son dans l'eau est 4,4 fois plus importante que celle dans l'air, et le rapport de densité est d'environ 820.
Absorption du son
L'absorption du son de basse fréquence est faible[9]. (voir Technical Guides – Calculation of absorption of sound in seawater pour un outil de calcul en ligne). La cause principale d'atténuation du son dans l'eau douce, et à fréquence élevée dans l'eau de mer (au-delà de 100 kHz), est la viscosité. Les principales contributions additionnelles aux fréquences plus faibles dans l'eau de mer sont la relaxation ionique de l'acide borique (jusqu'à 10 kHz)[9] et du sulfate de magnésium (de 10 kHz à 100 kHz) [10].
Le son est également atténué du fait des pertes aux frontières du fluide. Près de la surface de la mer, une couche de bulles ou la glace peut accentuer les pertes, tandis qu'au fond de la mer le son peut pénétrer les sédiments et être atténué.
Surface
La frontière eau/air peut être considérée comme un réflecteur quasi parfait. L'écart d'impédance est tellement élevé qu'une très faible part de l'énergie traverse la frontière. La réflexion des ondes de pression acoustique sur la surface de l'eau provoque une inversion de phase. Ceci se représente mathématiquement par un coefficient de réflexion égal à -1[11].
Aux fréquences élevées (au-delà de 1 kHz) ou lorsque la mer est agitée, une partie du son incident est diffractée. La valeur absolue du coefficient de réflexion est alors inférieure à 1. Par exemple, à proximité de l'incidence normale, le coefficient de réflexion vaut , où h est la valeur efficace de la hauteur des vagues[12].

La présence de bulles générées par le vent ou de poissons proches de la surface de l'eau modifient également la réflexion du son[13]. Les bulles peuvent également former un panache qui absorbe et diffracte le son[14].
Fond marin
L'écart d'impédance acoustique entre l'eau et le fond est en général bien inférieur à celui avec la surface de l'eau, et est plus complexe. Il dépend de la nature du fond et de la profondeur des différentes couches. Plusieurs théories ont été développées pour prédire la propagation du son dans le fond marin, notamment celle de Biot [15] et celle de Buckingham[16].
Sur cible
La réflexion du son sur une cible dont les dimensions sont grandes comparées à la longueur d'onde acoustique dépend de sa taille, de sa forme et de son impédance acoustique.
Des formules permettent de calculer l'indice de cible de différentes formes simples, en fonction de l'angle d'incidence du son. L'indice de cible de formes plus complexes peut être approximé en combinant ceux de formes simples[1].
Propagation du son
La propagation acoustique sous-marine dépend de plusieurs facteurs. La direction de propagation du son est déterminée par le gradient de la vitesse du son dans l'eau. En mer les gradients verticaux sont en général beaucoup plus élevés que les horizontaux. Les variations de température et de salinité peuvent provoquer des inversions de gradient de célérité dans la thermocline, créant ainsi un guide d'ondes efficace à la profondeur correspondant au minimum de la célérité. Ce type de profil peut générer des régions à faible intensité sonores, appelées « zones d'ombre », et des régions à intensité élevée, appelées « Caustiques. » Ces régions peuvent être calculées par les méthodes de tracé de rayons.
À l'équateur et aux latitudes tempérées, la température de surface de l'océan est suffisamment élevée pour inverser l'effet de la pression, de sorte que le minimum de célérité apparaît à une profondeur de quelques mètres. La présence de ce minimum créé un canal spécial, appelé canal sonore profond (DSC), ou canal SOFAR (pour SOund Fixing and Ranging), permettant la propagation du son sur des milliers de kilomètres sans interaction avec la surface de la mer ou le fond marin. Les zones de convergence du son constituent également un autre phénomène. Dans ce cas le son est diffracté vers le bas à partir d'une source proche de la surface, puis renvoyé vers le haut. La distance horizontale de la source à laquelle ce phénomène apparaît dépend des gradients de célérité positifs et négatifs. Un conduit de surface peut également apparaître dans les eaux profondes ou modérément peu profondes quand il existe une diffraction vers le haut, par exemple du fait de températures de surface froides. La propagation se fait par rebonds successifs sur la surface.
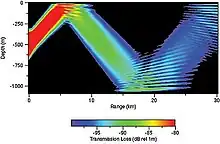
En général, la propagation du son dans l'eau entraîne une diminution de son intensité sonore lorsque la distance augmente, bien que dans certains cas un gain peut être obtenu du fait d'un focus de l'énergie. Les "pertes de propagation" (parfois appelées "pertes de transmission") sont une mesure quantitative de la réduction de l'intensité sonore entre deux points, en général la source sonore et le récepteur distant. Soit l'intensité en champ lointain de la source, référencée à un mètre de distance du centre acoustique, et l'intensité au niveau du récepteur, alors les pertes de propagation s'expriment par[1] : . Dans cette équation n'est pas exactement l'intensité acoustique au récepteur, qui est une quantité vectorielle, mais un scalaire égal à l'intensité de l'onde plane équivalente du champ sonore. Cette intensité est définie par l'amplitude de l'intensité d'une onde plane dont la valeur efficace de la pression est égale à celle du champ acoustique réel. À faible distance les pertes de propagation sont principalement dues à la divergence tandis que sur de longues distances elles sont principalement dues au pertes par absorption ou dispersion.



Il est possible de définir également les pertes de propagation en termes de pression et non d'intensité ainsi[17] : , où est la pression acoustique efficace en champ lointain du projecteur, référencé à 1 m, et est la pression efficace au niveau du récepteur.



Ces deux définitions ne sont pas rigoureusement équivalentes car l'impédance caractéristique du récepteur peut être différente de celle de la source. À cause de cela la définition en termes d'intensité amène à une définition de l'équation du sonar différente de celle basée sur le rapport des pressions[18]. Si la source et le récepteur sont tous deux dans l'eau, la différence est faible.
Modélisation de la propagation
La propagation du son dans l'eau est décrite par l'équation des ondes, avec les conditions aux limites appropriées. Un certain nombre de modèles ont été développés pour simplifier les calculs de propagation. Ces modèles incluent la théorie des rayons, les solutions de mode normal, et les simplifications par équation parabolique de l'équation des ondes[19]. Chaque jeu de solutions est en général valide et efficace en termes de puissance de calcul dans une bande de fréquence et une distance données. La théorie des rayons est plus appropriée sur de courtes distances et à fréquence élevée, tandis que les autres solutions fonctionnent mieux sur de longues distances et à basse fréquence[20]. Diverses formules empiriques et analytiques proviennent également de mesures, et constituent des approximations intéressantes[21].
Réverbération
Les sons transitoires génèrent un fond sonore en décroissance qui peut être de durée bien supérieure au signal transitoire initial. La cause de ce fond sonore, appelé réverbération, est partiellement due à la dispersion générée aux frontières rugueuses, et également à celle générée par les poissons et autre biote. Pour être détecté facilement, un signal acoustique doit dépasser le niveau de réverbération ainsi que le niveau de bruit ambiant.
Effet Doppler
Si un objet sous-marin se déplace relativement à un récepteur sous-marin, la fréquence du son reçu diffère de celle du son émis (ou réfléchi) par l'objet. Ce décalage en fréquence est appelé effet Doppler. Ce décalage peut être facilement observé dans les systèmes sonar actifs, en particulier ceux à bande étroite, car la fréquence d'émission est connue. Le déplacement relatif entre le sonar et l'objet peut alors être calculé. Parfois la fréquence du bruit émis (une tonalité) peut être connue; dans ce cas le même calcul peut être fait pour un sonar passif. Pour les systèmes actifs, le décalage en fréquence est égal à , avec F la fréquence émise, v la vitesse relative du réflecteur et c la célérité du son. Pour les systèmes passifs, le décalage est divisé par 2, la propagation ne se faisant que sur un aller. Le décalage est positif (la fréquence augmente) lorsque la cible s'approche.

Fluctuations d'intensité
Bien que les modélisations de propagation acoustique sont basées en général sur un niveau sonore reçu constant, en pratique il existe des fluctuations à la fois temporelles et spatiales. Elles sont dues à des phénomènes environnementaux à la fois locaux et globaux. Les trajets multiples, générés sur le trajet émetteur / récepteur, en sont une cause majeure: de faibles changements de phases dans le pattern d'interférence entre les différents trajets peut générer de grandes fluctuations dans l'intensité sonore.
Non-linéarités
Dans l'eau, notamment en présence de bulles d'air, le changement de densité provoqué par un changement de pression n'est pas exactement proportionnel. Cela génère des fréquences harmoniques et sous-harmoniques pour une onde sinusoïdale. Dans le cas où deux ondes sinusoïdales se rencontrent, de nouvelles fréquences résultant de la somme et de la soustraction des deux fréquences initiales sont générées. Ce phénomène est d'autant plus important que le niveau de source est élevé. Du fait de la non-linéarité la vitesse du son varie en fonction de la pression. Ainsi une onde sinusoïdale se transforme en onde en dent de scie avec un front montant raide, et un front descendant progressif. Ce phénomène est utilisé dans les sonars paramétriques et des théories ont été développées pour le prendre en compte, par exemple celle de Westerfield.
Mesures
Le son dans l'eau est mesuré grâce à un hydrophone, qui est l'équivalent sous-marin d'un microphone. Un hydrophone mesure des variations de pression, qui sont en général converties en niveau de pression acoustique (SPL), représentation logarithmique de la valeur efficace de la pression acoustique.
Les mesures sont en général exprimées dans l'une des trois formes suivantes :
- Pression acoustique RMS en micropascals (ou dB réf. 1 µPa)
- Pression acoustique RMS dans une bande passante donnée, en général octaves ou tiers d'octaves (dB réf. 1 µPa)
- Densité spectrale (pression RMS par unité de bande passante), en micropascal carré par hertz (dB réf. 1 µPa²/Hz)
L'échelle de pression acoustique dans l'eau diffère de celle utilisée pour le son dans l'air. Dans l'air la pression de référence est de 20 µPa contre 1 µPa dans l'eau. Pour une même valeur de SPL, l'intensité de l'onde plane (puissance par unité de surface, proportionnelle à la pression acoustique efficace divisée par l'impédance acoustique) dans l'air est d'environ 202×3 600 = 1 440 000 fois plus élevée que dans l'eau. De manière similaire, l'intensité est environ la même si le SPL est 61,6 dB plus élevé dans l'eau.
Vitesse du son
Les valeurs approximatives de la vitesse du son dans l'eau douce et l'eau salée sont respectivement de 1450 et 1500 m/s à la pression atmosphérique, tandis que la densité est respectivement de 1000 et 1 030 kg/m3[22].
La vitesse du son dans l'eau augmente avec la pression, la température et la salinité[23] - [24].
La vitesse maximale dans une eau pure à pression atmosphérique est atteinte à environ 74 °C ; le son se propage moins vite au-delà de cette température; le maximum augmente avec la pression [25].
Des outils de calculs en ligne sont disponibles ici: Technical Guides – Speed of Sound in Sea-Water et Technical Guides – Speed of Sound in Pure Water.
Absorption
De nombreuses campagnes de mesures de l'absorption du son se sont déroulées dans les lacs et les océans [9] - [10] (voir Technical Guides – Calculation of absorption of sound in seawater pour un outil de calcul en ligne).
Bruit ambiant
La mesure des signaux acoustiques est possible si leur amplitude dépasse un seuil minimal, déterminé en partie par le traitement du signal utilisé et également par le niveau de bruit de fond. Le bruit ambiant est la partie du bruit reçu qui est indépendante de la source, du récepteur et des caractéristiques de la plateforme. Cela exclut notamment la réverbération et le bruit hydrodynamique par exemple.
Les sources sonores transitoires contribuent également au bruit ambiant. Cela inclut l'activité géologique intermittente, telle que les séismes et les volcans sous-marins[26], la pluie en surface, l'activité biologique. Les sources biologiques incluent les cétacés et notamment la baleine bleue, le rorqual commun et le grand cachalot[27] - [28], certains types de poissons, et les Alpheidae.
La pluie peut générer un niveau de bruit ambiant élevé. Cependant la relation numérique entre l'intensité de la pluie et le niveau de bruit ambiant est difficile à déterminer car la mesure de l'intensité de la pluie est problématique en mer.
Réverbération
De nombreuses mesures de réverbération sur la surface de l'eau, le fond de la mer et de volume ont été réalisées. Certains modèles empiriques sont dérivés de ces mesures. L'équation de Chapman et Harris est couramment utilisée pour la bande 0,4 à 6,4 kHz[29]. Une forme d'onde sinusoïdale est élargie en fréquence du fait du mouvement de la surface. Pour la réverbération de fond la loi de Lambert s'applique de manière approximative (voir Mackenzie)[30]. La réverbération de volume apparaît en général dans les couches, qui changent de profondeur au cours de la journée (voir Marshall et Chapman)[31]. Le côté sub-surface de la glace peut également induire une forte réverbération quand il est rugueux (voir Milne)[32].
Pertes sur le fond
Des pertes sur le fond marin ont été mesurées en fonction de l'angle rasant pour différentes fréquences à différents endroits (mesures effectuées par le service géophysique de la Marine des États-Unis par exemple)[33]. Les pertes sont fonction de la vitesse du son dans le fond marin (affectées par les gradients et les couches), et par la rugosité. Des graphes de pertes ont été générés pour des environnements donnés. En eau peu profonde les pertes sur le fond marin ont un impact prépondérant en propagation longue distance. À faible fréquence le son peut se propager à travers le sédiment puis à nouveau dans l'eau.
Notes et références
- Urick, Robert J. Principles of Underwater Sound, 3e édition. New York. McGraw-Hill, 1983.
- Principes mathématiques de la philosophie naturelle, t. I, sur Gallica, trad. française de la marquise du Châtelet (1706-1749).
- Principes mathématiques de la philosophie naturelle, tome II, sur Gallica, trad. française de la marquise du Châtelet (1706-1749).
- C. S. Clay & H. Medwin, Acoustical Oceanography (Wiley, New York, 1977)
- Annales de chimie et de physique 36 [2] 236 (1827)
- A. B. Wood, From the Board of Invention and Research to the Royal Naval Scientific Service, Journal of the Royal Naval Scientific Service Vol. 20, No 4, p. 1–100 (185–284).
- (en) Everett Mendelsohn, « 11. Science, scientists and the military », dans John Krige & Dominique Pestre, Companion Encyclopedia to science in the twentieth century, (1re éd. 1997) (présentation en ligne)
- H. Lichte, « On the influence of horizontal temperature layers in sea water on the range of underwater sound signals », Physik. Z., vol. 17, no 385,
- R. E. Francois & G. R. Garrison, Sound absorption based on ocean measurements. Part II: Boric acid contribution and equation for total absorption, J. Acoust. Soc. Am. 72, 1879–1890 (1982).
- R. E. Francois and G. R. Garrison, Sound absorption based on ocean measurements. Part I: Pure water and magnesium sulfate contributions, J. Acoust. Soc. Am. 72, 896–907 (1982).
- Ainslie, M. A. (2010). Principles of Sonar Performance Modeling. Berlin: Springer. p36
- H. Medwin & C. S. Clay, Fundamentals of Acoustical Oceanography (Academic, Boston, 1998)
- D. E. Weston & P. A. Ching, Wind effects in shallow-water transmission, J. Acoust. Soc. Am. 86, 1530–1545 (1989)
- G. V. Norton & J. C. Novarini, On the relative role of sea-surface roughness and bubble plumes in shallow-water propagation in the low-kilohertz region, J. Acoust. Soc. Am. 110, 2946–2955 (2001)
- N Chotiros, Biot Model of Sound Propagation in Water Saturated Sand. J. Acoust. Soc. Am. 97, 199 (1995)
- M. J. Buckingham, Wave propagation, stress relaxation, and grain-to-grain shearing in saturated, unconsolidated marine sediments, J. Acoust. Soc. Am. 108, 2796–2815 (2000).
- C. L. Morfey, Dictionary of Acoustics (Academic Press, San Diego, 2001).
- M. A. Ainslie, The sonar equation and the definitions of propagation loss, J. Acoust. Soc. Am. 115, 131–134 (2004).
- F. B. Jensen, W. A. Kuperman, M. B. Porter & H. Schmidt, Computational Ocean Acoustics (AIP Press, NY, 1994).
- C. H. Harrison, Ocean propagation models, Applied Acoustics 27, 163–201 (1989).
- L. M. Brekhovskikh & Yu. P. Lysanov, Fundamentals of Ocean Acoustics, 3e édition (Springer-Verlag, NY, 2003).
- A. D. Pierce, Acoustics: An Introduction to its Physical Principles and Applications (American Institute of Physics, New York, 1989)
- Mackenzie, Nine-term equation for sound speed in the oceans, J. Acoust. Soc. Am. 70, 807–812 (1982).
- C. C. Leroy, The speed of sound in pure and neptunian water, in Handbook of Elastic Properties of Solids, Liquids and Gases, edited by Levy, Bass & Stern, Volume IV: Elastic Properties of Fluids: Liquids and Gases (Academic Press, 2001)
- Wayne D. Wilson, « Speed of Sound in Distilled Water as a Function of Temperature and Pressure », J. Acoust. Soc. Am., vol. 31, no 8, , p. 1067–1072 (DOI 10.1121/1.1907828, Bibcode 1959ASAJ...31.1067W, lire en ligne, consulté le )
- R. S. Dietz et M. J. Sheehy, Transpacific detection of myojin volcanic explosions by underwater sound. Bulletin of the Geological Society 2 942–956 (1954)
- M. A. McDonald, J. A. Hildebrand & S. M. Wiggins, Increases in deep ocean ambient noise in the Northeast Pacific west of San Nicolas Island, California, J. Acoust. Soc. Am. 120, 711–718 (2006)
- Ocean Noise and Marine Mammals, National Research Council of the National Academies (The National Academies Press, Washington, 2003)
- R Chapman et J Harris, Surface backscattering Strengths Measured with Explosive Sound Sources. J. Acoust. Soc. Am. 34, 547 (1962)
- K Mackenzie, Bottom Reverberation for 530 and 1030 cps Sound in Deep Water. J. Acoust. Soc. Am. 36, 1596 (1964)
- J. R. Marshall and R. P. Chapman, Reverberation from a Deep Scattering Layer Measured with Explosive Sound Sources. J. Acoust. Soc. Am. 36, 164 (1964)
- A. Milne, Underwater Backscattering Strengths of Arctic Pack Ice. J. Acoust. Soc. Am. 36, 1551 (1964)
- MGS Station Data Listing and Report Catalog, Nav Oceanog Office Special Publication 142, 1974
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Underwater acoustics » (voir la liste des auteurs).
Liens externes
- Ocean Acoustics Library
- Ultrasonics and Underwater Acoustics
- Monitoring the global ocean through underwater acoustics
- ASA Underwater Acoustics Technical Committee
- An Ocean of Sound
- Underwater Acoustic Communications
- Acoustic Communications Group de l'Institut océanographique de Woods Hole
- Sound in the Sea
- SFSU Underwater Acoustics Research Group
- Discovery of Sound in the Sea
- PAMBuoy Passively Acoustic Monitoring