Communication acoustique sous-marine
La notion de communication acoustique sous-marine ("CAS" ou parfois dite hydroacoustique ou encore "UAC", pour « underwater acoustic communications ») regroupe les moyens (biologiques et artificiels) d'envoi/réception d'informations sous l'eau[1]. La plupart des systèmes acoustiques subaquatiques sont actifs (émetteurs, récepteurs ou récepteurs de signal réfléchi), mais il existe aussi quelques dispositifs passifs destinés à l'interception de signaux sonores circulant dans l'eau[2].

Les animaux aquatiques ont développé de nombreux moyens de communication faisant intervenir la vue, des émissions lumineuses, des changements de couleur, le champ électromagnétique ou encore l'émission de sons et l'ouïe.
L’homme a développé plusieurs techniques pour une telle communication (ex : hydrophones, transducteurs…).
Difficultés
Comparativement à la communication aérienne la communication sous-marine (sans fil) pose de nombreux problèmes et elle se solde généralement par de faibles débits d'information, principalement car elle doit presque toujours utiliser des ondes acoustiques au lieu d'ondes électromagnétiques. En effet l'eau (et notamment l'eau salée très conductrice) est un frein à la propagation des ondes électromagnétiques, en raison principalement de son caractère très dissipatif.
La communication sous l'eau est en outre rendue difficile par des facteurs tels que la propagation par trajets multiples (multi-path), les variations temporelles du canal, la faible largeur de bande disponible et une forte atténuation du signal (sur les longues distances notamment sauf dans les basses fréquences d'ondes sonores (utilisées par exemple par les baleines), mais qui ont une faible « bande passante »).
Si les ondes sonores se propagent mieux et plus vite dans l'eau que dans l'air, elles le font avec d'autres contraintes, et notamment avec des perturbations dues au bruit ambiant, aux échos parasites à certains mouvements de l'eau et aux changements de sa densité (liés à des différences de températures, de densité et/ou de salinité qui induisent des phénomènes de réflexion du son ou des modifications locales de vitesse du signal sonore[2]. La surface de l'eau (par ailleurs parfois mouvante) et le fond ou certaines parois se comportent aussi comme des réflecteurs. L'insonification du milieu marin n'est pas homogène (le son ne s'y propage pas de manière rectiligne). Enfin dans ce milieu mouvant le déplacement fréquent de l'émetteur et/ou du récepteur (sonar/cible par ex) sont source d'un effet Doppler. La pollution sonore induite par les activités humaines (trafic maritime et sondages géologiques notamment) s'ajoute au bruit de fond naturel (l'océan n'est pas "le monde du silence"[2]).
Enfin, expérimenter dans la mer ou de manière générale sous-l'eau est significativement plus coûteux et complexe que dans l'air[2].
Dans le monde animal
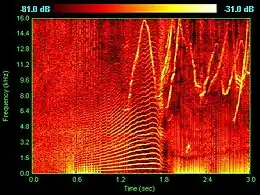
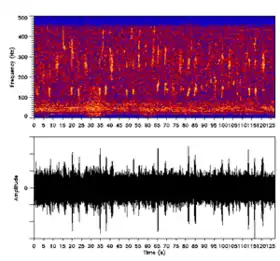
Un cas particulier est celui du son émis par un poisson (mâle de Cynoscion othonopterus) émis lors du frai[3]. C'est non seulement le son le plus fort jamais entendu venant de poissons, mais aussi l'un des sons les plus forts jamais captés sous l'eau. Selon les auteurs de l'étude ce grésillement hurlant collectivement émis par le banc de poissons au moment du frai (1,5 million d'individus environ) est si intense qu'il pourrait nuire à l'ouïe d'animaux marins tels que phoques et baleines éventuellement attirés par cette manne de nourriture[4]. Le son émis par un individu unique est constitué de séquences de neuf impulsions. Il se fond dans un chœur continu à des fréquences inférieures à 2000 Hz[3]. Sur le lieu de reproduction, plus la densité en poisson est importante, plus le bruit qu'ils émettent est intense, et on suppose donc que ce phénomène était autrefois bien plus intense, car ce poisson présente des effectifs qui ont fortement décliné en raison de la surpêche (et peut être de la pollution de son milieu)[5] - [6].
Dans le domaine des usages par l'Homme
Histoire
Au début du XXe siècle, certains navires ont communiqué par des cloches sous-marines. Ce système très primitif de communication rendait alors le même service que le service de radionavigation maritime encore alors très primitif[7].
La communication acoustique sous-marine est née selon Xavier Lurton au début du XXe siècle avec les travaux de Paul Langevin[2]. Mais elle s'est surtout développée près d'un demi-siècle plus tard (à partir de la Seconde Guerre mondiale pour les besoins de la guerre sur mer). Les techniques qu'elle utilise ont aussi servi à l'océanographie (tomographie, sondeurs multifaisceaux, sonar latéral bathymétrique)[2], à la recherche géologique sous-marine notamment destinée à la recherche de pétrole et de gaz offshore, à l'archéologie subaquatique ainsi qu'à la pêche et à certains moyens d'imagerie subaquatique[2].
Une première étape avait été franchie avec l'invention du transducteur électro-acoustique (dit oscillateur de Fessenden, car inventé par Reginald Fessenden) qui a permis la communication avec les sous-marins (ou entre sous-marins), avec de premières application dès 1912 (à la Submarine Signal Company de Boston) ; cet appareil était capable de créer des sons sous-marins et de capter leurs échos.
Une seconde étape a été l'apparition de dispositifs piézoélectriques.
Types de modulation utilisés pour la communication acoustique sous-marine
Ce sont les méthodes de modulation créées pour la communication radio qui ont souvent été ensuite adaptées à la communication acoustique sous-marine, mais seuls quelques schémas de modulation sont adaptées au milieu subaquatique.
Parmi les méthodes de modulation utilisées pour l'UAC figurent :
- La modulation par déplacement de fréquence (MDF), plus connue sous sa dénomination anglophone de frequency-shift keying (FSK), qui est un mode de modulation de fréquence (numérique dans lequel le signal modulé varie entre des fréquences prédéterminées ;
- La « modulation par commutation de phase » ou encore « modulation par changement de phase » (ou phase-shift keying, désigné par PSK) ; Ce groupe de méthodes de modulations numériques vise à véhiculer de l'information binaire uniquement via la phase d'un signal de référence (porteuse) ;
- L'« Étalement de spectre par saut de fréquence » aussi dit « étalement de spectre par évasion de fréquence » (ou FHSS pour « Frequency Hopped Spread Spectrum »), qui est une transmission par ondes radio utilisant alternativement plusieurs canaux (sous-porteuses) répartis dans une bande de fréquence selon une séquence pseudo-aléatoire uniquement connue de l'émetteur et du récepteur ;
- L' « étalement de spectre à séquence directe », (ou DSSS pour : « direct-sequence spread spectrum ») ; une technique d'étalement de spectre utilisée dans les communications par satellite, les réseaux sans fil (Wi-Fi notamment), définie par la norme IEEE 802.11b, visant notamment à être plus résistante aux brouillages et aux interférences ;
- Modulation de fréquence (FPPM) et « modulation en position d'impulsions » (ou PPM pour « Pulse-position modulation »), par exemple utilisé en communication optique, mais inadaptée à la plupart des configurations subaquatiques (perturbées par des interférences dues au phénomène de trajets multiples) ;
- « Modulation par déplacement de fréquence multiple » ou (MFSK) pour « Multiple Frequency Shift Keying » ;
- L’OFDM (Orthogonal frequency-division multiplexing) ; mode de codage numérique par répartition « en fréquences orthogonales » sous forme de multiples sous-porteuses ; il permet de lutter contre les canaux sélectifs en fréquence en permettant une égalisation de faible complexité (ces canaux se manifestent surtout en présence de trajets multiples qui posent d’autant plus de problème que débit de transmission est élevé. Cette technique est donc surtout utilisée par les applications à très haut débit.
Notes et références
- Akyildiz I.F, Pompili D & Melodia T (2005) "Underwater Acoustic Sensor Networks: Research Challenges," Ad Hoc Networks (Elsevier), vol. 3, no. 3, pp. 257-279, Mars
- Lurton X (1998) Acoustique sous-marine: présentation et applications Editions Quae | 110 page
- Erisman B.E & Rowell T.J (2017) A sound worth saving: acoustic characteristics of a massive fish spawning aggregation| Biology Letters| 20 décembre 2017 | DOI: 10.1098/rsbl.2017.0656 |datas
- Shultz D (2017) One of the loudest underwater sounds is made by an animal you wouldn’t expect, News publiée par le journal Science le 19 décembre 2017]
- Erisman BE, Apel A, MacCall A, Roman-Rodriguez M, Fujita R. (2014) The influence of gear selectivity and spawning behavior on a data-poor assessment of a spawning aggregation fishery. Fish. Res. 159, 75–87 (doi:10.1016/j.fishres.2014.05.013)
- Erisman BE, Aburto-Oropeza O, Gonzalez-Abraham C, Mascareñas-Osorio I, Moreno-Báez M, Hastings PA (2012) Spatio-temporal dynamics of a fish spawning aggregation and its fishery in the Gulf of California. Sci. Rep. 2, 284. (doi:10.1038/srep00284)
- « Submarine Signaling on Steamships », sur www.gjenvick.com (consulté le )
Voir aussi
Articles connexes
Liens externes
- A paper on denoising of underwater signals
- DSPComm - Underwater acoustic modem manufacturer
- (en) Informations sur les projets ELF aux États-Unis.
- (en) Informations sur le projet ELF russe : Zeus par Trond Jacobsen à ALFLAB, Halden en Norvège.
- (en) Informations sur le site ELF de Clam Lake dans le Wisconsin, publié par l'US Navy.