Coordonnées orthogonales
En mathématiques, les coordonnées orthogonales sont définies comme un ensemble de d coordonnées q = (q1, q2..., qd) dans lequel toutes les surfaces coordonnées se rencontrent à angle droit. Une surface coordonnée particulière de coordonnée qk est une courbe, une surface ou une hypersurface sur laquelle chaque qk est une constante. Par exemple, le système de coordonnées cartésiennes de dimension 3 (x, y, z) est un système de coordonnées orthogonales puisque ses surfaces coordonnées x = constante, y = constante et z = constante sont des plans deux à deux perpendiculaires. Le système de coordonnées orthogonales est un cas particulier mais très courant des systèmes de coordonnées curvilignes.
Motivation

Alors que les opérations vectorielles et les lois physiques sont usuellement plus facile à exprimer en coordonnées cartésiennes, les coordonnées orthogonales non cartésiennes sont souvent préférées lorsque la géométrie du problème permet de résoudre plus facilement un problème comme les problèmes aux limites (résolution d'équation aux dérivées partielles) que l'on rencontre en mécanique quantique, mécanique des fluides, électromagnétisme, diffusion d'espèces chimiques ou encore pour la résolution de l'équation de la chaleur.
Le principal avantage d'un systèmes de coordonnées non cartésiennes est qu'on peut le choisir pour tirer parti des symétries du problème. Par exemple, considérons l'onde de pression due à une explosion ponctuelle ; cette onde se propage dans toutes les directions de l'espace tri-dimensionnel de telle sorte que l'onde de pression peut être caractérisée uniquement par la distance au point d'explosion en fonction du temps, ce qui devient un problème unidimensionnel en coordonnées sphériques. Citons un autre exemple, le mouvement d'un fluide dans un tube à section circulaire : en coordonnées cartésiennes, on doit résoudre une équation aux dérivées partielles en dimension 2 avec des conditions aux limites alors qu'en coordonnées cylindriques, le problème devient unidimensionnel et ne met en œuvre qu'une équation différentielle ordinaire.
Les systèmes de coordonnées orthogonales sont préférés aux coordonnées curvilignes pour leur simplicité : de nombreuses complications techniques apparaissent lorsque les coordonnées ne sont pas orthogonales. À titre d'exemple, de nombreux problèmes (modélisés avec des équations différentielles) peuvent être résolus par la méthode dite de séparation des variables qui permet de convertir un problème complexe en dimension d en d problèmes unidimensionnels, chacun étant potentiellement beaucoup plus simple à résoudre. De nombreux problèmes peuvent être ramenés à la résolution de l'équation de Laplace ou l'équation de Helmholtz qui sont respectivement séparables dans 13 et 11 systèmes de coordonnées orthogonales[1] - [2].
Les coordonnées orthogonales ne présentent jamais de termes non nuls en dehors de la diagonale dans leur tenseur métrique. En d'autres termes, le carré de la distance infinitésimale ds2 peut toujours être exprimé comme une somme pondérée des carrés des différentielles des coordonnées

où d est la dimension et les facteurs d'échelle (ou poids)

sont les racines carrées des termes diagonaux du tenseur métrique, soit encore les normes des vecteurs de la base locale décrite ci-dessous. Ces facteurs d'échelles h(nd) sont utilisés pour exprimer dans le nouveau système de coordonnées les opérateurs différentiels usuels comme le gradient, le laplacien, la divergence et le rotationnel.

Pour générer un système de coordonnées orthogonales en dimension 2, on peut simplement prendre l'image par une transformation conforme d'une grille 2D de coordonnées cartésiennes (x, y). On peut former un nombre complexe z = x + iy à partir des nombres réels x et y, i étant « la » racine carrée de -1. Près d'un point z0 où la dérivée d'une fonction holomorphe f est non nulle, f est une transformation conforme. Si l'on écrit w = f(z) = u + iv, alors les courbes isovaleurs de u et v se croisent à angle droit, de la même manière que les lignes à x constant, ou y constant.
On peut créer un système de coordonnées orthogonales en 3 dimensions et plus à partir d'un système de coordonnées orthogonales en 2 dimensions que l'on prolonge dans une nouvelle dimension (par exemple les coordonnées cylindriques) ou par rotation du système 2D autour d'un axe de symétrie. Notons qu'il existe des systèmes de coordonnées orthogonales en 3D qui ne peuvent pas être obtenus par l'une de ces méthodes comme les coordonnées ellipsoïdales (en). Une manière plus générale d'obtenir un système de coordonnées orthogonales consiste à partir des surfaces à coordonnées constantes puis à construire les trajectoires orthogonales associées.
Bases et systèmes de coordonnées
Base covariante
En coordonnées cartésiennes, les vecteurs de base sont fixés (constants). Dans le cas plus général des coordonnées curvilignes, on définit en chaque point de l'espace une base dont les vecteurs ne sont généralement pas constants (ils changent quand on déplace le point de l'espace considéré). Ce qui caractérise les coordonnées orthogonales est que ces vecteurs de base sont toujours orthogonaux entre eux en tout point de l'espace. En d'autres termes,

Ces vecteurs de base sont par définition les vecteurs tangents des courbes obtenues en faisant varier une seule coordonnée, les autres étant maintenues fixées :
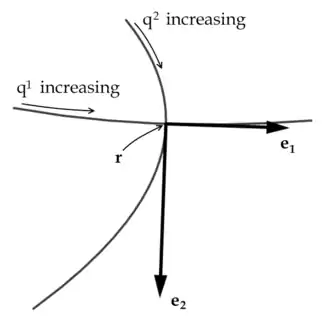

où r est un point donné et qi est la coordonnée pour laquelle on identifie le vecteur de base. En d'autres termes, la courbe où l'on fixe toutes les coordonnées sauf une peut être vue comme une courbe paramétrée par cette coordonnée, et la dérivée de la courbe par rapport au paramètre est exactement le vecteur de base associé à la coordonnée considérée dans le système de coordonnées orthogonales.
On remarque que les vecteurs n'ont pas nécessairement la même norme. Les fonctions appelées facteur d'échelle sont simplement les normes des vecteurs de base (cf. la table ci-dessous). Les facteurs d'échelle sont encore appelés parfois coefficients de Lamé, mais il ne faut pas les confondre avec les coefficients (plus connus) du même nom définis en mécanique des milieux continus dans le cadre de l'élasticité linéaire.


Les vecteurs de base une fois normalisés (c'est-à-dire rendu unitaires) sont notés avec un chapeau :

Base contravariante
Les vecteurs de base mentionnés précédemment sont des vecteurs covariants. Dans le cas d'un système de coordonnées orthogonales, la base de vecteurs contravariants est facile à identifier puisque chaque vecteur est un vecteur de la base covariante mais avec une norme inversée (pour cette raison, les deux bases sont dites réciproque l'un de l'autre) :

Cela résulte du fait que, par définition, , en utilisant le symbole de Kronecker. On peut remarquer que :


Le système de coordonnées orthogonales est muni à présent de trois base de vecteurs : la base covariante ei, la base contravariante ei, et la base canonique normalisée êi. Alors qu'un vecteur est une quantité qui peut être définie indépendamment d'un système de coordonnée, les composantes du vecteur sont évidemment liées à la base choisie pour le représenter.
Afin d'éviter toute confusion, les composantes du vecteur x dans la base ei sont notées xi, tandis que les composantes dans la base ei sont xi :

La position des indices suit la convention de sommation d'Einstein. Le symbole de somme ∑ (Sigma majuscule) et les indices de début et fin de la somme (i = 1, 2, … , d), sont omis. Le passage des composantes d'une base à l'autre est défini alors par :

Algèbre vectorielle
L'addition de vecteur et la multiplication par un scalaire se fait composante par composante comme en coordonnées cartésiennes. Cependant un soin particulier doit être apporté pour les autres opérations vectorielles.
Il convient de rappeler que dans le cas général, la base de vecteurs d'un système de coordonnées orthogonales varie d'un point à l'autre ; cela doit être pris en considération pour définir les opérations suivantes.
Produit scalaire
Le produit scalaire en coordonnées cartésiennes (espace Euclidien avec une base orthonormale) est défini par la somme des produits des composantes. En coordonnées orthogonales, le produit scalaire de deux vecteurs x et y prend la forme bien connue lorsque les composantes des vecteurs sont exprimées dans une base normalisée :

C'est une conséquence immédiate du fait que la base locale est une base orthonormale.
En utilisant les composantes des bases covariantes ou contravariante,

Ceci peut se déduire par exemple en 2D en utilisant la décomposition sur une base normalisée :
![{\displaystyle {\begin{aligned}\mathbf {x} \cdot \mathbf {y} &=\left(x^{1}\mathbf {e} _{1}+x^{2}\mathbf {e} _{2}\right)\cdot \left(y_{1}\mathbf {e} ^{1}+y_{2}\mathbf {e} ^{2}\right)\\[10pt]&=\left(x^{1}h_{1}{\hat {\mathbf {e} }}_{1}+x^{2}h_{2}{\hat {\mathbf {e} }}_{2}\right)\cdot \left(y_{1}{\frac {{\hat {\mathbf {e} }}^{1}}{h_{1}}}+y_{2}{\frac {{\hat {\mathbf {e} }}^{2}}{h_{2}}}\right)=x^{1}y_{1}+x^{2}y_{2}.\end{aligned}}}](https://img.franco.wiki/i/7d07b8539d82397b67ca6d6d3af3c18d42081ee5.svg)
Produit vectoriel
Le produit vectoriel en coordonnées cartésiennes 3D est donné par:

La formule ci-dessus reste valide dans un système de coordonnées orthogonales pourvu que les vecteurs de base soient normalisés.
Pour construire le produit vectoriel en coordonnées orthogonales avec une base covariante ou contravariante, on doit là encore utiliser des vecteurs de base normalisés :

qui, en développant, devient,

On peut obtenir une notation plus compacte en utilisant le tenseur de Levi-Civita, qui permet également de simplifier la généralisation aux systèmes de coordonnées non orthogonales et en dimension supérieure.
Analyse vectorielle
Dérivée
Considérons un déplacement infinitésimal

Par définition, le gradient d'une fonction f (ou tenseur) vérifie la relation :

On rappelle également la définition de l'opérateur nabla :

qui reste valable en coordonnées curvilignes.
Éléments différentiels
En notant dr un déplacement infinitésimal et êi les vecteurs de base normalisés, on peut déterminer les éléments différentiels suivants[3] - [4].
Élément différentiel Vecteurs Scalaires Élément linéaire (en) Vecteur tangent à la courbe iso-qi : longueur infinitésimale Élément de surface Normale à la surface iso-qk : Élément de volume Non disponible





où

est le jacobien (déterminant de la matrice jacobienne), et que l'on peut interpréter géométriquement comme la déformation du cube infiniment petit dxdydz vers le volume image en coordonnées orthogonales.
Intégration
En utilisant l'élément linéaire défini précédemment, l'intégrale curviligne le long de la courbe d'un vecteur F est :


On définit l'infiniment petit de surface dA pour une isosurface à qk constant :

De même, l'infiniment petit de volume est :

où le symbole ∏ (Pi majuscule) désigne un produit tout comme ∑ désigne une somme. On peut remarquer que le produit des facteurs d'échelle est égal au jacobien.
À titre d'exemple, l'intégrale de surface d'une fonction vectorielle F sur une surface isovaleur q1 = constante en 3D s'écrit :


On peut remarquer que F1/h1 est la composante de F normale à la surface.
Opérateurs d'analyse vectorielle en 3 dimensions
Ces opérateurs sont représentés dans la base normalisée : .

Operator Expression Gradient d'un champ scalaire Divergence d'un champ de vecteurs Rotationnel d'un champ de vecteurs Laplacien d'un champ scalaire

![{\displaystyle \nabla \cdot \mathbf {F} ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left(F_{1}h_{2}h_{3}\right)+{\frac {\partial }{\partial q^{2}}}\left(F_{2}h_{3}h_{1}\right)+{\frac {\partial }{\partial q^{3}}}\left(F_{3}h_{1}h_{2}\right)\right]}](https://img.franco.wiki/i/507074e0312d74f218fab31eb2c8b8f5b1f4c006.svg)
![{\displaystyle {\begin{aligned}\nabla \times \mathbf {F} &={\frac {{\hat {\mathbf {e} }}_{1}}{h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{2}}}\left(h_{3}F_{3}\right)-{\frac {\partial }{\partial q^{3}}}\left(h_{2}F_{2}\right)\right]+{\frac {{\hat {\mathbf {e} }}_{2}}{h_{3}h_{1}}}\left[{\frac {\partial }{\partial q^{3}}}\left(h_{1}F_{1}\right)-{\frac {\partial }{\partial q^{1}}}\left(h_{3}F_{3}\right)\right]\\[10pt]&+{\frac {{\hat {\mathbf {e} }}_{3}}{h_{1}h_{2}}}\left[{\frac {\partial }{\partial q^{1}}}\left(h_{2}F_{2}\right)-{\frac {\partial }{\partial q^{2}}}\left(h_{1}F_{1}\right)\right]={\frac {1}{h_{1}h_{2}h_{3}}}{\begin{vmatrix}h_{1}{\hat {\mathbf {e} }}_{1}&h_{2}{\hat {\mathbf {e} }}_{2}&h_{3}{\hat {\mathbf {e} }}_{3}\\{\dfrac {\partial }{\partial q^{1}}}&{\dfrac {\partial }{\partial q^{2}}}&{\dfrac {\partial }{\partial q^{3}}}\\h_{1}F_{1}&h_{2}F_{2}&h_{3}F_{3}\end{vmatrix}}\end{aligned}}}](https://img.franco.wiki/i/6f0cf253355fd6c635882210ba8aea0ce0a2ed69.svg)
![{\displaystyle \nabla ^{2}\phi ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left({\frac {h_{2}h_{3}}{h_{1}}}{\frac {\partial \phi }{\partial q^{1}}}\right)+{\frac {\partial }{\partial q^{2}}}\left({\frac {h_{3}h_{1}}{h_{2}}}{\frac {\partial \phi }{\partial q^{2}}}\right)+{\frac {\partial }{\partial q^{3}}}\left({\frac {h_{1}h_{2}}{h_{3}}}{\frac {\partial \phi }{\partial q^{3}}}\right)\right]}](https://img.franco.wiki/i/c36a46d097a001f5efcd7baeb71a704a4b7d12a7.svg)
On peut simplifier les expressions ci-dessus en utilisant le symbole de Levi-Civita, en définissant , et en admettant une sommation sur les indices répétés :

Operateur Expression Gradient d'un champ scalaire Divergence d'un champ de vecteurs Rotationnel d'un champ de vecteur Laplacien d'un champ scalaire




Systèmes de coordonnées orthogonales usuels
Voici quelques exemples de systèmes de coordonnées orthogonales[4]. L'intervalle de définition est mentionné dans la colonne des coordonnées.
Coordonnées curvillignes (q1, q2, q3) Transformation depuis les coordonnées cartésiennes (x, y, z) Facteurs d'échelle Coordonnées sphériques Coordonnées cylindriques Coordonnées cylindriques paraboliques (en) Coordonnées paraboloïdales Coordonnées cylindriques elliptiques (en) Coordonnées sphériques étirées (en) Coordonnées sphériques aplaties (en) Coordonnées ellipsoïdales (en) où
Coordonnées bipolaires Coordonnées toroïdales (en) Coordonnées coniques (en)
![{\displaystyle (r,\theta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}](https://img.franco.wiki/i/05f80374da8b4cc0a2a38db8d858474b585b0574.svg)














![{\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}](https://img.franco.wiki/i/58c343b31aeed0f8843151e697f796a225a14491.svg)


![{\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times \left[-{\frac {\pi }{2}},{\frac {\pi }{2}}\right]\times [0,2\pi )}](https://img.franco.wiki/i/93628d06c8efe1c6f60365cc5f80f615c07bca13.svg)









![{\displaystyle (u,v,\phi )\in (-\pi ,\pi ]\times [0,\infty )\times [0,2\pi )}](https://img.franco.wiki/i/000c3d0efd5294a2c0d125ea8f4a1052147fc971.svg)





Notes et références
- (en) Eric W. Weisstein, « Orthogonal Coordinate System », sur MathWorld.
- (en) Philip McCord Morse et Herman Feshbach, Methods of Theoretical Physics, vol. 1, McGraw-Hill, 1953, p. 494-523 et 655-666.
- (en) Murray R. Spiegel et J. Liu, Mathematical handbook of formulas and tables, New York, McGraw-Hill, , 3e éd., 312 p. (ISBN 978-0-07-154855-7).
- (en) M. R. Spiegel, S. Lipschutz et D. Spellman, Vector analysis and an introduction to tensor analysis, New York, McGraw-Hill, , 2e éd., 238 p. (ISBN 978-0-07-161545-7).
Bibliographie
- (en) G. A. Korn et T. M. Korn, Mathematical Handbook for Scientists and Engineers, McGraw-Hill, 1961, p. 164-182
- (en) H. Margenau et G. M. Murphy, The Mathematics of Physics and Chemistry, 2e éd., Van Nostrand, 1956, p. 172-192
- (en) Leonid P. Lebedev et Michael J. Cloud, Tensor analysis, River Edge, NJ, World Scientific Pub, , 191 p. (ISBN 978-981-256-446-7, 9789812383600 et 9781281876850, lire en ligne), p. 81-88