Tenseur métrique
Définition
Le tenseur métrique d'un espace vectoriel  de dimension finie n est un tenseur covariant de rang 2 (c'est-à-dire une forme bilinéaire) défini sur :
de dimension finie n est un tenseur covariant de rang 2 (c'est-à-dire une forme bilinéaire) défini sur :

 est :
est :
- symétrique :
 ;
;
- non dégénérée :
 ;
;
- positive :
 (à l'exception des pseudo-métriques, voir ci-dessous). E, muni de ce tenseur, est alors un espace euclidien.
(à l'exception des pseudo-métriques, voir ci-dessous). E, muni de ce tenseur, est alors un espace euclidien.
Plus généralement, le tenseur métrique[1] d'une variété différentielle est la donnée, en chaque point de la variété, d'un tenseur métrique sur l'espace tangent à la variété en ce point. L'attribution d'un tenseur métrique à cette variété fait de celle-ci une variété riemannienne (ou une variété pseudo-riemannienne dans le cas d'une pseudo-métrique).
On note le produit scalaire de deux vecteurs  et
et  , où i = 1, ..., n, de la manière suivante :
, où i = 1, ..., n, de la manière suivante :

La notation  est conventionnellement utilisée pour les composantes du tenseur métrique. En Relativité Restreinte, puis Générale, le tenseur métrique est noté, par convention gμν où µ et ν sont éléments de l'ensemble {0,1,2,3}
est conventionnellement utilisée pour les composantes du tenseur métrique. En Relativité Restreinte, puis Générale, le tenseur métrique est noté, par convention gμν où µ et ν sont éléments de l'ensemble {0,1,2,3}
Dans l'espace dual de , la métrique conjuguée à celle de , notée  et appelée métrique duale ou métrique inverse (la matrice représentant ses composantes étant l'inverse de celle représentant les composantes de la métrique de ), est un tenseur contravariant. Il respecte l'identité
et appelée métrique duale ou métrique inverse (la matrice représentant ses composantes étant l'inverse de celle représentant les composantes de la métrique de ), est un tenseur contravariant. Il respecte l'identité  , qui permet de transformer des composantes contravariantes en composantes covariantes et vice versa.
, qui permet de transformer des composantes contravariantes en composantes covariantes et vice versa.
Pseudo-métrique
Lorsque  n'est pas toujours positif, on peut parler de pseudo-métrique (c'est par exemple le cas de la métrique lorentzienne (encore appelée métrique de Minkowski) de l'espace de Minkowski). Dans ce cadre[2], (que l'on note alors
n'est pas toujours positif, on peut parler de pseudo-métrique (c'est par exemple le cas de la métrique lorentzienne (encore appelée métrique de Minkowski) de l'espace de Minkowski). Dans ce cadre[2], (que l'on note alors  ) représente la pseudo-norme au carré.
) représente la pseudo-norme au carré.
Métrique minkowskienne (ou lorentzienne)
On note  la distance minkowskienne entre deux points
la distance minkowskienne entre deux points  et
et  définie par :
définie par :

avec comme matrice du produit scalaire[3] :

et  la distance minkowskienne au carré entre deux points infiniment voisins :
la distance minkowskienne au carré entre deux points infiniment voisins :

Pour un vecteur  d'un tel espace, nous avons les définitions suivantes[4] :
d'un tel espace, nous avons les définitions suivantes[4] :

Une courbe de cet espace-temps décrite par l'équation  , où
, où  est un paramètre, admet comme vecteur tangent
est un paramètre, admet comme vecteur tangent  . Le signe de la pseudo-norme au carré de ce vecteur est indépendant du choix de et nous avons les définitions suivantes (cf. relativité restreinte) :
. Le signe de la pseudo-norme au carré de ce vecteur est indépendant du choix de et nous avons les définitions suivantes (cf. relativité restreinte) :

Coordonnées rectilignes
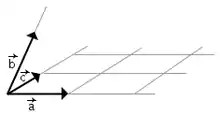
Dans le système de coordonnées d'une base quelconque  de l'espace vectoriel , le tenseur métrique sur se représente par ses composantes dans cette base. Ces composantes prennent la forme d'une matrice symétrique
de l'espace vectoriel , le tenseur métrique sur se représente par ses composantes dans cette base. Ces composantes prennent la forme d'une matrice symétrique  dont les entrées se transforment de façon covariante lors d'un changement de base:
dont les entrées se transforment de façon covariante lors d'un changement de base:

où  désigne le produit scalaire de
désigne le produit scalaire de  et de
et de  [5].
[5].
Si l'on connaît une autre base, mais qui soit orthonormée (par rapport au produit scalaire en question, c'est-à-dire celui associé au tenseur métrique), alors, en exprimant les vecteurs de la base en fonction de cette base orthonormée, il sera facile de calculer ces produits scalaires.
Cas des coordonnées curvilignes
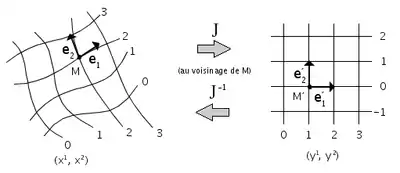
Lorsqu'il s'agit d'un système de coordonnées curvilignes[6] (sur une variété différentielle ℳ de dimension  ), nous ne pouvons pas y définir de base intrinsèque globale, car les vecteurs
), nous ne pouvons pas y définir de base intrinsèque globale, car les vecteurs  de la base (intrinsèque) locale varient lorsque le point courant (de coordonnées
de la base (intrinsèque) locale varient lorsque le point courant (de coordonnées  ) de ℳ varie. devient alors un champ tensoriel. Le « champ des bases locales » (appelé base holonome, base de coordonnées (en) ou repère lisse de coordonnées) que l'on a utilisé repère des vecteurs infinitésimaux, donc peut être vu comme un « produit scalaire infinitésimal ». On adopte alors l'écriture suivante:
) de ℳ varie. devient alors un champ tensoriel. Le « champ des bases locales » (appelé base holonome, base de coordonnées (en) ou repère lisse de coordonnées) que l'on a utilisé repère des vecteurs infinitésimaux, donc peut être vu comme un « produit scalaire infinitésimal ». On adopte alors l'écriture suivante:  (où
(où  désigne la longueur de l'arc infinitésimal).
désigne la longueur de l'arc infinitésimal).
Calcul à partir de données extrinsèques
Coordonnées curvilignes.
Si ℳ est immergée dans un espace euclidien (de dimension  ), le produit scalaire sur cet espace euclidien induira un produit scalaire sur ℳ. Recherchons le champ de tenseur métrique (induit) sur ℳ relatif à ce produit scalaire induit. Soit
), le produit scalaire sur cet espace euclidien induira un produit scalaire sur ℳ. Recherchons le champ de tenseur métrique (induit) sur ℳ relatif à ce produit scalaire induit. Soit  une base orthonormée de cet espace euclidien (qui est donc une base extrinsèque pour ℳ). Remarquons, au passage, que, dans une base orthonormée, les composantes du tenseur métrique sont
une base orthonormée de cet espace euclidien (qui est donc une base extrinsèque pour ℳ). Remarquons, au passage, que, dans une base orthonormée, les composantes du tenseur métrique sont  (cf. delta de Kronecker). Appelons
(cf. delta de Kronecker). Appelons  , la matrice jacobienne des coordonnées du point courant de ℳ dans la base
, la matrice jacobienne des coordonnées du point courant de ℳ dans la base  (donc ces coordonnées sont extrinsèques) exprimées en fonction des coordonnées curvilignes (intrinsèques à la variété ℳ) de ce même point. Les colonnes de , calculée au voisinage d'un point
(donc ces coordonnées sont extrinsèques) exprimées en fonction des coordonnées curvilignes (intrinsèques à la variété ℳ) de ce même point. Les colonnes de , calculée au voisinage d'un point  de ℳ, fournissent une approximation linéaire des lignes de coordonnées (curvilignes) au voisinage de ce point , puisqu'elles donnent les composantes dans la base de vecteurs qui sont tangents en aux lignes de coordonnées et qui constituent la base locale
de ℳ, fournissent une approximation linéaire des lignes de coordonnées (curvilignes) au voisinage de ce point , puisqu'elles donnent les composantes dans la base de vecteurs qui sont tangents en aux lignes de coordonnées et qui constituent la base locale  en associée aux coordonnées curvilignes en question. Il suffit alors de calculer les
en associée aux coordonnées curvilignes en question. Il suffit alors de calculer les  produits scalaires possibles des vecteurs de la base locale pour obtenir les composantes (dans la base locale) du tenseur métrique en . Ceci revient à calculer
produits scalaires possibles des vecteurs de la base locale pour obtenir les composantes (dans la base locale) du tenseur métrique en . Ceci revient à calculer  en . Constatons que cette matrice, qui représente donc les composantes du tenseur métrique dans la base locale et que l'on notera , est sa propre transposée, c'est-à-dire qu'elle est bien une matrice symétrique. Remarquons que c'est une matrice carrée (m×m), alors qu'en général, , qui est une matrice (n×m), ne l'est pas (car la dimension de la variété ℳ est en général inférieure à celle de l'espace euclidien dans lequel elle est immergée).
en . Constatons que cette matrice, qui représente donc les composantes du tenseur métrique dans la base locale et que l'on notera , est sa propre transposée, c'est-à-dire qu'elle est bien une matrice symétrique. Remarquons que c'est une matrice carrée (m×m), alors qu'en général, , qui est une matrice (n×m), ne l'est pas (car la dimension de la variété ℳ est en général inférieure à celle de l'espace euclidien dans lequel elle est immergée).

ou, en notation indicielle:

Montée et descente d'indices
Le tenseur métrique permet de faire monter ou descendre les indices des composantes des vecteurs, des formes différentielles ou des tenseurs.
Prenons le cas du vecteur  . Ce vecteur permet, par l'intermédiaire du tenseur métrique, de définir la forme linéaire
. Ce vecteur permet, par l'intermédiaire du tenseur métrique, de définir la forme linéaire  , élément de l'espace dual, qui, à un vecteur
, élément de l'espace dual, qui, à un vecteur  , associe le réel
, associe le réel  . En fonction des composantes des deux vecteurs et du tenseur métrique, ce réel s'exprime sous la forme :
. En fonction des composantes des deux vecteurs et du tenseur métrique, ce réel s'exprime sous la forme :

Dans la base duale  , cela signifie que la forme linéaire a pour composantes
, cela signifie que la forme linéaire a pour composantes  . Autrement dit, on passe des composantes d'un vecteur aux composantes de la forme linéaire associée en « abaissant les indices » au moyen du tenseur métrique, transformant le vecteur
. Autrement dit, on passe des composantes d'un vecteur aux composantes de la forme linéaire associée en « abaissant les indices » au moyen du tenseur métrique, transformant le vecteur  en le covecteur
en le covecteur  .
.
Réciproquement, si on se donne une forme linéaire  , on reconstitue le vecteur dont elle est issue en « remontant les indices » :
, on reconstitue le vecteur dont elle est issue en « remontant les indices » :  , le tenseur de composantes
, le tenseur de composantes  étant le tenseur métrique inverse de .
étant le tenseur métrique inverse de .
On a l'identité .
Distances et angles
La longueur d'un segment d'une courbe paramétrée par  , partant du point
, partant du point  en
en  et arrivant au point
et arrivant au point  en
en  est définie par :
est définie par :

où  est l'équation décrivant cette courbe dans le système de coordonnées local.
est l'équation décrivant cette courbe dans le système de coordonnées local.
L'angle  entre deux vecteurs
entre deux vecteurs  et
et  tangents en un même point[7] est défini par :
tangents en un même point[7] est défini par :

La connaissance du tenseur métrique permet également de déterminer les géodésiques de l'espace sur lequel ce tenseur est défini.
Changement de base
Lors d'un changement de base, les composantes du tenseur métrique se transforment de façon covariante, c'est-à-dire :

où est la matrice de passage d'une base dans laquelle on connaît les composantes de la métrique vers une autre base pour laquelle on cherche les composantes  de cette même métrique.
de cette même métrique.
Ou encore, en notation matricielle :

Produit doublement contracté avec sa dérivée partielle
Le produit contracté doublement du tenseur métrique et de sa dérivée partielle change de signe lorsqu'on remonte les indices d'un facteur du produit et que l'on descend les indices de l'autre facteur :
 .
.
Démonstration
La matrice est l'inverse de la matrice du tenseur métrique :
 .
.
En prenant  , on trouve
, on trouve
 où
où  est la dimension de l'espace considéré.
est la dimension de l'espace considéré.
En dérivant membre à membre selon l'indice  , on obtient
, on obtient
 ,
,
donc
 .
.
Comme le tenseur métrique est symétrique, cela équivaut à
 ,
,
qui est le résultat recherché.
 n'est pas un tenseur (sans quoi on aurait le signe
n'est pas un tenseur (sans quoi on aurait le signe  ).
).- Par contre, lorsque l'on calcule la dérivée covariante
 du tenseur métrique, on obtient un tenseur, mais ce tenseur est nul.
du tenseur métrique, on obtient un tenseur, mais ce tenseur est nul.
Quelques exemples
Exemple 1
Dans un espace euclidien à 2 dimensions, en prenant un repère cartésien orthonormé, les composantes du tenseur métrique sont données par :

et la longueur d'un arc de courbe vaut :

Exemple 2
On se propose de calculer les composantes du tenseur métrique pour le système de coordonnées sphériques d'un espace euclidien de dimension  . Les équations suivantes nous donnent les coordonnées
. Les équations suivantes nous donnent les coordonnées  d'un point de cet espace euclidien en rapport à un repère cartésien orthonormé exprimées en fonction des coordonnées sphériques de ce point
d'un point de cet espace euclidien en rapport à un repère cartésien orthonormé exprimées en fonction des coordonnées sphériques de ce point  :
:

On peut maintenant écrire la matrice jacobienne de ce changement de coordonnées :

En appliquant les résultats du §Calcul à partir de données extrinsèques, les composantes du tenseur métrique dans la base locale en rapport au système de coordonnées sphériques seront données par le produit de la transposée de cette matrice jacobienne par cette matrice jacobienne elle-même, donc on trouve :

Détails


Exemples de métriques
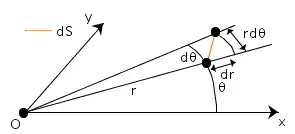
Coordonnées polaires.
Plan euclidien, coordonnées polaires : 


Espace euclidien, coordonnées cylindriques : 


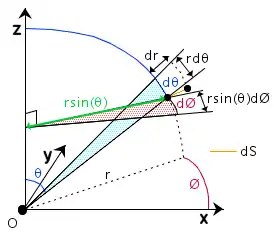
Coordonnées sphériques.
Espace euclidien, coordonnées sphériques : 


Espace de Minkowski, espace-temps plat (relativité restreinte) : 


Métrique de Schwarzschild (solution particulière de la relativité générale; l'espace est ici courbé) : 


Notes et références
- En toute rigueur, sur une variété différentielle, on devrait parler de champ de tenseur métrique, mais, par abus de langage, on parle souvent de tenseur métrique ou tout simplement de métrique.
- [PDF] Cours de relativité générale, p. 10-15, Bernard LINET, Laboratoire de Mathématiques et Physique théorique, Université François Rabelais, Tours.
- En prenant la signature (−, +, +, +). Certains auteurs préfèrent la signature (+, −, −, −).
- Ici pour la signature (−, +, +, +). Pour la signature (+, −, −, −), les définitions orienté espace et orienté temps doivent être permutées, ainsi que les définitions genre espace et genre temps.
- (en) Online Dictionary of Crystallography.
- (en) Mathemathics for Physics and Physicists, p. 455-459, Walter APPEL
- En coordonnées rectilignes (v. §Coordonnées rectilignes et §Cas des coordonnées curvilignes), l'espace tangent en un point de la variété différentielle qu'est un espace euclidien « s'identifie » à cet espace euclidien lui-même.
Voir aussi
Bibliographie
- Claude Semay, Bernard Silvestre-Brac, Introduction au calcul tensoriel, Applications à la physique, Dunod, 2007 (ISBN 978-2-10-050552-4)
Cet article est issu de
wikipedia. Text licence:
CC BY-SA 4.0, Des conditions supplémentaires peuvent s’appliquer aux fichiers multimédias.