Surveyor 7
Surveyor 7 est la septième et dernière sonde spatiale du programme Surveyor de la NASA dont l'objectif est d'étudier les caractéristiques du sol lunaire afin de préparer l'atterrissage des missions du programme Apollo. La sonde spatiale est lancée le et atterrit près du cratère Tycho le . Surveyor 7 est la cinquième sonde spatiale du programme Surveyor à réussir un atterrissage lunaire en douceur et la troisième mission à obtenir des données de composition in situ sur la Lune. Au total, 21 274 images sont transmises vers la Terre.
Sonde spatiale ( Lune )
| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Surveyor |
| Domaine | Exploration de la Lune |
| Type de mission | Atterrisseur |
| Statut | Mission terminé |
| Autres noms | Surveyor-G |
| Base de lancement | Cape Kennedy, LC-36A |
| Lancement | 7 janvier 1968 à 06 h 30 TU |
| Lanceur |
Atlas-Centaur (AC-15) (Atlas 3C # 5903C - Centaur D-1A) |
| Fin de mission | 21 février 1968 à 00 h 24 TU |
| Durée | 65 heures |
| Durée de vie | 45 jours (mission primaire) |
| Identifiant COSPAR | 1968-001A |
| Protection planétaire | Catégorie II[1] |
| Masse au lancement |
1 040,1 kg au lancement 305,7 kg à l'atterrissage |
|---|---|
| Propulsion | Chimique |
| Ergols | Hydrate d'hydrazine |
| Contrôle d'attitude | Stabilisé sur 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 85 watts |
| Orbite | Descente directe |
|---|---|
| Atterrissage |
10 janvier 1968 à 01 h 05 min 36,3 s TU |
| Localisation | 40,97° S et 11,44° O |
| Television Photography | Transmission de gros plans du sol lunaire |
|---|---|
| Alpha-Scattering Surface Analyzer | Mesurer les principaux éléments du sol lunaire |
| Hardness and Bearing Strength of Lunar Surface | Dureté et force portante du sol lunaire |
| Soil Mechanics Surface Sampler | Échantillonneur de sol lunaire |
Objectifs de la mission
Les principaux objectifs du programme Surveyor, une série de sept vols robotiques d'atterrissage en douceur, sont de soutenir les prochains atterrissages des équipages du programme Apollo en : 1° développant et validant la technologie d'atterrissage en douceur sur la Lune ; 2° fournir des données sur la compatibilité de la conception d'Apollo avec les conditions rencontrées sur la surface lunaire ; et 3° enrichir les connaissances scientifiques de la Lune.
Les objectifs spécifiques de cette mission sont les suivants : 1 ° effectuer un atterrissage lunaire en douceur (dans une zone montagneuse retirée pour fournir un type de photographie du sol et d'échantillons lunaires significativement différents de ceux des autres missions Surveyor) ; 2° obtenir des images télévisées ; 3° déterminer l'abondance relative des éléments chimiques ; 4° manipuler le matériau du sol lunaire ; 5° obtenir des données de la dynamique de l'atterrissage ; et 6° obtenir des données de réflectivité radar et thermique. Surveyor 7 est la seule sonde spatiale Surveyor à atterrir dans une région montagneuse lunaire.
Comme les Surveyor 1, Surveyor 3, Surveyor 5 et Surveyor 6 ont rempli avec succès les exigences du programme Apollo, la NASA choisit d'utiliser la dernière sonde lunaire Surveyor disponible pour une mission purement scientifique en dehors d'un site d'atterrissage pour les premiers vols Apollo.
Description du véhicule spatial
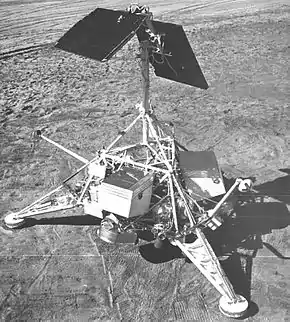
La structure de base de la sonde spatiale Surveyor se compose d'un trépied de tubes en aluminium à paroi mince et d'entretoises fournissant des surfaces de montage pour les systèmes d'alimentation, de communications, de propulsion, de contrôle de vol et des systèmes de charge utile. Un mât central est à environ un mètre au-dessus du sommet du trépied. Trois jambes d'atterrissage articulées sont fixées aux bas de la structure. Les jambes en aluminium ont des amortisseurs et le mécanisme de verrouillage se termine par trois pieds avec amortisseurs. Les trois pieds s'étendent à 4,3 mètres du centre de la sonde Surveyor. Le véhicule spatial mesure 3 mètres de haut. Les jambes sont repliées pour s'insérer sous la coiffe au lancement.
Une surface de 0,855 m2 avec 792 cellules photovoltaïques est installée au-dessus du mât et génère 85 watts de puissance emmagasinée dans un accumulateur argent-zinc. Les communications sont effectuées via une antenne mobile à gain élevé montée dans le haut du mât central pour transmettre des images de télévision, deux antennes omnidirectionnelles installées aux extrémités du mât pour les liaisons montante et descendante, ainsi que deux récepteurs et deux émetteurs.
Le contrôle thermique est obtenu par une combinaison de peinture blanche, de finition thermique à haute émittance infrarouge et de dessous en aluminium poli. Deux compartiments à contrôle thermique, équipés de couvertures super-isolantes, d'interrupteurs thermiques et de petits radiateurs électriques, sont installés sur la structure de la sonde spatiale. Un compartiment, maintenu entre 5 et 50 °C, abrite les communications et l'électronique pour l'alimentation de la sonde lunaire. L'autre compartiment, entre -20 et 50 °C, abrite les composants de contrôle et de traitement du signal de transmission.
La caméra de télévision est installée près du sommet du trépied et des jauges de contrainte, des capteurs de température et d'autres instruments d'ingénierie sont intégrés dans toute la sonde spatiale. Une cible photométrique est installée près de l'extrémité d'une des trois jambes d'atterrissage et une sur une courte perche s'étendant au bas de la structure. D'autres ensembles de charges utiles, qui diffèrent d'une mission à l'autre, sont installés sur différentes parties de la structure dépendant de leur fonction.
Un capteur solaire, un viseur de l'étoile Canopus et des gyroscopes sur trois axes fournissent une connaissance de l'attitude. La propulsion et le contrôle d'attitude sont assurés par des jets d'azote gazeux froid durant les phases de la trajectoire, trois moteurs verniers durant les phases propulsées, y compris l'atterrissage, et le moteur principal à propergol solide durant la descente finale vers la Lune. La tuyère du moteur principal en acier est installé au centre de la sonde spatiale.
Les moteurs verniers utilisent comme carburant de l'hydrate d'hydrazine et comme oxydant du MON-10 (90% N2O2, 10% NO). Chaque chambre de poussée peut produire de 130 N à 460 N de poussée sur commande, un moteur peut pivoter pour contrôler le roulis. Le carburant est emmagasiné dans des réservoirs sphériques installés sur la structure du trépied. Pour la séquence d'atterrissage, un radar d'altitude déclenche la mise à feu de la tuyère principale pour le freinage primaire. Une fois la mise à feu complétée, la tuyère et le radar sont largués et les radars doppler et altimètre sont activés. Ceux-ci fournissent des informations au pilote automatique qui contrôle le système de propulsion des moteurs verniers pour l'atterrissage.
Surveyor 7 est de conception similaire au Surveyor 6. Il transporte une caméra de télévision avec des filtres polarisants, un instrument de diffusion alpha, un échantillonneur de surface similaire à celui utilisé sur Surveyor 3, des aimants en forme de barre barre sur deux pieds des trois pieds de la sonde lunaire, deux aimants en fer à cheval sur la pelle et des miroirs auxiliaires.
Parmi les miroirs auxiliaires, trois sont utilisés pour observer les zones sous la sonde spatiale, un pour fournir des vues stéréoscopiques de la zone de l'échantillonneur de surface, et sept pour montrer le matériau lunaire déposé sur le véhicule spatial. Il apporte plus de 100 capteurs pour surveiller les aspects techniques des performances de la sonde spatiale. Surveyor 7 a une masse de 1 040,1 kg au lancement et de 305,7 kg à l'atterrissage.
Description des instruments
Caméra de télévision
La caméra de télévision embarquée est composée d'un tube Vidicon, de lentilles de 25 mm et 100 mm de focale, d'obturateurs, de filtres polarisants, et de l'iris installé sur un axe quasi vertical. La caméra est installée sous un miroir qui peut être déplacé en azimut et en élévation par un moteur pas-à-pas. Les filtres polarisants servent comme analyseurs pour la détection de la mesure de la composante linéaire polarisée de la lumière diffusée par la surface lunaire. Un miroir auxiliaire est utilisé pour visualiser la surface de la Lune sous le véhicule spatial.
La couverture image par image de la surface de la Lune est obtenue sur 360° en azimut et de 90° au-dessus du plan perpendiculaire à l'axe de la caméra et à 60° en dessous de ce même plan. Les deux modes de fonctionnement 600 lignes et 200 lignes sont utilisés. Le mode de fonctionnement 200 lignes est transmis par une antenne omnidirectionnelle à raison d'une image numérisée toutes les 61,8 secondes. La transmission complète d'une image 200 lignes prend 20 secondes en utilisant une bande passante de 1,2 kHz.
La plupart des transmissions consistent en des images de 600 lignes, qui sont transmises par une antenne directionnelle. Ces images sont numérisées toutes les 3,6 secondes. Chaque image nécessite nominalement 1 seconde pour être lue à partir du tube Vidicon et utilise une bande passante de 220 kHz pour la transmission.
La plage dynamique et la sensibilité de cette caméra sont légèrement inférieures à celles de la caméra de Surveyor 6. La résolution et la qualité sont excellentes. Les images de télévision sont affichées sur un moniteur à balayage lent recouvert d'un phosphore à longue persistance. La persistance est sélectionnée pour correspondre de façon optimale au débit d'image maximal nominal. Une image d'identification de télévision est reçue pour chaque nouvelle image de télévision entrante et est affichée en temps réel à un rythme compatible avec celui de la nouvelle image entrante. Ces données sont enregistrées sur un magnétoscope vidéo et sur un film de 70 mm.
La caméra de télévision transmet 20 961 images durant le premier jour lunaire, du 10 au . Du 12 au , la caméra fonctionne en mode 200 lignes en raison de la perte du balayage horizontal en mode 600 lignes. Au cours du deuxième jour lunaire, 45 images sont transmises avant que la perte de courant n'entraîne la suspension du fonctionnement de la caméra de télévision.
Analyseur de surface à diffusion alpha
L'analyseur de surface à diffusion alpha (Alpha-Scattering Surface Analyzer) est conçu pour mesurer directement le taux des principaux éléments chimiques du sol lunaire. L'instrumentation consiste en une source alpha (isotope curium 242) collimatée pour irradier une ouverture de 10 cm de diamètre au bas de l'instrument où se trouve l'échantillon et deux systèmes parallèles et indépendants de détection de particules irradiées. Un système, contenant deux capteurs, détecte les spectres d'énergie des particules alpha diffusées par la surface lunaire, et l'autre, contenant quatre capteurs, détecte les spectres d'énergie des protons produits par des réactions (alpha et protons) dans le matériau du sol lunaire.
Chaque détecteur est lié à un analyseur de hauteur d'impulsion (Pulse Height Analyzer). Un boîtier électronique numérique, situé dans un compartiment de la sonde lunaire, transmet en continu des signaux vers la Terre chaque fois que l'expérience est en cours. Les spectres contiennent des informations quantitatives sur tous les principaux éléments des échantillons à l'exception de l'hydrogène, de l'hélium et du lithium.
L'expérience fournit 46 heures de données à partir de trois mesures d'échantillons de la surface lunaire. Ces mesures concernent une partie de la surface non perturbée, une roche lunaire et une zone largement creusée du sol lunaire. Les données sont obtenues au cours des premier et deuxième jours lunaires, du 12 au et du 13 au .
Dureté et force portante de la surface lunaire
Dureté et force portante de la surface lunaire (Hardness and Bearing Strength of Lunar Surface), l'objectif de cette expérience est de déterminer la dureté et la force portante du sol lunaire en utilisant des jauges de contrainte, des accéléromètres et des gyroscopes.
Échantillonneur de surface pour la mécanique du sol lunaire
L'échantillonneur de surface pour la mécanique du sol lunaire (Lunar Soil Mechanics Surface Sampler) est conçu pour ramasser, gratter et creuser des tranchées du sol lunaire et pour transporter des matériaux de surface lunaire tout en étant photographié afin de déterminer les propriétés de la surface lunaire. L'échantillonneur est installé sous la caméra de télévision et consiste principalement en une pelle d'environ 12 cm de long et 5 cm de large. La pelle se compose d'un récipient, d'une lame affûtée et d'un moteur électrique pour ouvrir et fermer le récipient. La pelle a deux aimants en forme de fer à cheval. Une petite semelle est attachée à la porte de la pelle pour présenter une surface plane à la surface lunaire. La pelle est capable de contenir une quantité maximale d'environ 3,2 cm de diamètre de matériau lunaire solide et un maximum de 100 cm3 de matériau granulaire. La pelle est installé sur un bras de pantographe qui peut être étendu à environ 1,5 m ou rétracté à proximité du moteur de la sonde spatiale. Le bras peut être déplacé d'un azimut de +40° à -72° ou être élevé de 13 cm par un moteur. Il peut être projeté sur la surface lunaire par la force fournie par la gravité et un ressort.
La pelle est installé sous la caméra de télévision dans une position qui lui permet d'atteindre l'instrument de diffusion alpha dans sa position déployée et de le redéployer vers un autre emplacement. L'instrument effectue 16 essais de portance, sept essais de creusement de tranchées et deux essais d'impact. Il libère également l'instrument de diffusion alpha lorsqu'il n'a pas réussi à se déployer sur la surface lunaire, et déplacé cet instrument pour l'évaluation de d'autres échantillons.
La performance est impeccable durant 36 heures de fonctionnement entre le et le . L'instrument répond aux commandes du , qui vérifient qu'il a survécu à la nuit lunaire. Cependant, le système d'alimentation ne peut prendre en charge aucune opération.
Déroulement de la mission
Surveyor 7 est lancé à 06 h 30 min 00,54 s TU le sur le lanceur Atlas-Centaur (AC-15) depuis l'aire de lancement LC-36A de la base de lancement de Cap Kennedy. La sonde spatiale est placé sur une orbite d'attente terrestre, puis transféré sur une trajectoire lunaire par une deuxième mise à feu de l'étage Centaur. Surveyor 7 se sépare de l'étage Centaur à 07 h 05 min 16 s TU. Une correction de trajectoire est effectuée à 23 h 30 min 10 s TU le . L'atterrissage a lieu à 01 h 05 min 36,3 s TU le à 40,9811 S, 348,4873 E (déterminé à partir des images du Lunar Reconnaissance Orbiter) à environ 29 km au nord du cratère Tycho et à 2,4 km de sa cible dans les hautes terres lunaires.
Les opérations scientifiques commencent peu de temps après l'atterrissage. La caméra de télévision envoie 20 993 images le premier jour lunaire. Les premières photos de la surface montrent étonnamment peu de cratères, tout comme les sites de mers lunaires, bien que la zone générale soit plus rugueuse. Environ 21 heures après l'atterrissage, les contrôleurs au sol tirent des charges pyrotechniques pour faire tomber l'instrument de diffusion alpha sur la surface lunaire. Lorsque l'instrument ne réussit pas à dépasser une position intermédiaire, les contrôleurs utilisent l'échantillonneur de surface pour le forcer à descendre sur le sol lunaire. L'échantillonneur est ensuite utilisé pour placer l'instrument de diffusion alpha sur une roche, puis dans une tranchée qu'il a creusée. Environ 66 heures de données de diffusion alpha sont obtenues au cours du premier jour lunaire sur les trois sites. Les opérations se poursuivent après le coucher de Soleil et comprennent des photographies de la Terre, des étoiles et de la couronne solaire.
Les opérations se terminent à 14 h 12 TU le , 80 heures après le coucher de Soleil. Les opérations du deuxième jour lunaire commencent à 19 h 01 TU le et comprennent 45 images supplémentaires pour un total de 21 274 et 34 heures de données de diffusion alpha de l'intérieur d'une tranchée. Les opérations sont terminées le à 12 h 24 TU. L'échantillonneur de surface lunaire fonctionne parfaitement durant 36 heures et 21 minutes au total, creusant des tranchées et déplaçant et manipulant quatre roches.
Les résultats sont cohérents avec les missions précédentes, sauf que l'analyse chimique de la croûte des hautes terres lunaires montre qu'elle est plus pauvre en éléments du groupe du fer que les échantillons précédents, tous provenant de mers lunaires. Les expériences sur les aimants montrent la présence de composants magnétiques en quantités comparables à celles des sites Surveyor 5 et Surveyor 6. Surveyor 7 réussit également à détecter des faisceaux laser transmis depuis la Terre. Les objectifs de la mission sont pleinement satisfaits par les opérations de la sonde lunaire.