SCR-584
Le SCR-584 (SCR pour Signal Corps Radio) est un radar à micro-ondes mis au point par le MIT Radiation Laboratory[1] au cours de la Seconde Guerre mondiale. Il remplace — au fur et à mesure qu'il était fabriqué — le SCR-268, plus ancien et beaucoup plus complexe, qui est le principal dispositif de pointage antiaérien de l’US Army. En opération il se révèle exceptionnel, bien plus avancé que n'importe quel autre radar militaire au cours de la guerre.
Contexte
| Caractéristiques techniques du SCR-584 | |
|---|---|
| Longueur d'onde | 10 cm |
| Fréquence | Quatre bandes autour de 3 GHz |
| Magnétron | 2J32 |
| Puissance crête | 250 kW |
| Largeur d'impulsion | 0,8 µs |
| Fréquence de répétition des impulsions | 1 707 impulsions par seconde |
| Diamètre de l'antenne | 1,8 m |
| Largeur du faisceau à mi-puissance | 4 degrés |
| Portée maximale | |
| Affichage PPI | 64 km |
| Auto-Track | 30 km |
| Commande de l'artillerie | 25 km |
| Portée minimale | 450 à 900 m |
| Limite d'élévation inférieure | – 175 mils (– 9,8 degrés) |
| Limite d'élévation supérieure | + 1 580 mils (+ 88,9 degrés) |
| Couverture en azimut | 360 degrés |
| Vitesse de rotation en mode recherche | 5 tours par minute |
| Erreur sur la distance | 23 m |
| Erreur sur l'azimut | 1 mil (0,06 degré) |
| Précision en élévation | 1 mil (0,06 degré) |
| Alimentation électrique | 115 V, 60 Hz, triphasé, 10 kVA maximum (sans IFF) |
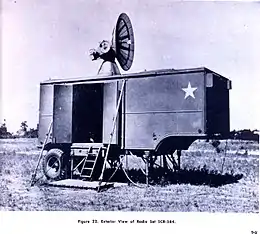
| Le SCR-584 est construit sur un chariot de type K-78. Son poids total est de 9,072 tonnes. Sa longueur hors tout est de 6 m, sa largeur de 2,45 m et sa hauteur de 3,15 m. | |
|
Données en provenance de l'U.S. War Department Technical livrets TM11-1324 et TM11-1524 (publiés en par le Bureau d'impression du gouvernement des États-Unis). | |
L'histoire du SCR-84 commence avec la Mission Tizard en quand un groupe de scientifiques britanniques se rend aux États-Unis pour présenter les résultats de leurs recherches pouvant être utiles à l'effort de guerre. Au départ, les Britanniques hésitent à livrer trop d'informations sans rien obtenir en retour. Ils apprennent cependant que les États-Unis sont en train de mettre au point trois dispositifs semblables aux leurs, le Chain Home, le radar CXAM de l’US Navy et le radar SCR-270. Aucun de ces systèmes n'a la précision suffisante pour diriger le tir des armes qui leur sont associées. Le radar de l'US Navy à une longueur d'onde de 10 cm permet une résolution suffisante, mais le klystron n'opère qu'à des puissances faibles, le rendant peu opérationnel. Le physicien britannique Edward George Bowen présente alors à l'ensemble des chercheurs l'un des tout premiers magnétrons à cavités. Il fonctionne également sur 10 cm mais offre une puissance plus importante que celles des radars américains de l'époque fonctionnant sur ondes longues. Plus tard, un historien américain en parlera « comme de la cargaison la plus importante jamais arrivée dans nos ports ». Le dispositif est tellement innovant par rapport à tout ce qui existe alors aux États-Unis qu'un programme de recherche intensive est aussitôt programmé, dans le but d'entrer en production le plus rapidement possible. C'est ainsi qu'est créé le Radiation Laboratory[1] (RadLab). À la fin de la guerre, les États-Unis ont la suprématie dans le domaine des radars.
Développement
En plus de son radar de veille lointaine (en) SCR-270, l’US Army travaille sur un dispositif de pointage associé, le SCR-268. Fondé sur une technologie à ondes longues, le SCR-268 est peu utile dans sa forme originale, la résolution étant trop basse pour pointer des armes. De plus, le SCR-268 avait une taille le rendant peu opérationnel. En effet, les équipements radioélectriques requièrent, en général, des antennes dont la taille est proportionnelle à la longueur d'onde utilisée, et donc inversement proportionnelle à la fréquence. Dans le cas du SCR-268, la fréquence de fonctionnement de 205 MHz correspondait à une longueur d'onde de 1,5 m nécessitant des antennes extrêmement grandes qui posaient d'importants problèmes logistique. Un radar à micro-ondes opérant aux alentours des 10 cm de longueur d'onde pouvait être pointé avec bien plus de précision en utilisant une antenne parabolique beaucoup plus petite. Pour une fréquence donnée, plus la dimension maximale de l'antenne est grande, plus le faisceau est étroit le long de la normale de cette dimension (c'est-à-dire perpendiculairement à cette dimension) et donc, meilleure est la résolution du relèvement.
En , le Signal Corps Radio propose officiellement l'abandon du SCR-268, car le RadLab est déjà en train de mettre au point des radars équipés d'un magnétron. Plutôt qu'un système simple comme le SCR-268, ils proposent un dispositif plus sophistiqué qui permet le pointage direct des armes. C'est un domaine dans lequel le MIT est particulièrement compétent en raison de ses travaux sur les servomécanismes (au Servomechanisms Lab).
Dès , le RadLab dispose d'un prototype opérationnel. Les équipes du RadLab, sous la direction de Lee Davenport[2], testent le système de pointage automatique en reliant le radar à une tourelle provenant d'un bombardier B-29 Superfortress et en remplaçant les canons par une caméra. Un avion léger a ensuite volé dans la zone et, dès le , le dispositif est capable de suivre les évolutions de l'avion avec précision. Des études sont alors lancées pour fabriquer un système adapté au combat et susceptible d'être transporté sur une seule remorque avec son antenne parabolique d'1,80 m de diamètre sur le toit. Ce dispositif a été testé pour la première fois à Fort Monroe en février 1942 sous le nom de « XT-1 » pour eXperimental Truck-1 (camion expérimental no 1).

Des recherches sont également conduites sur un calculateur assurant le pointage des armes à l'aide de systèmes électriques en remplacement des systèmes mécaniques. Les laboratoires Bell livrent un calculateur analogique connu sous le nom de M-9 Director[3] capable de contrôler quatre canons standards de 90 mm M3. L'ensemble du dispositif, y compris le M-9, est présenté le . Dès le lendemain, 122 exemplaires sont commandés. Bell travaille en parallèle sur son propre radar à micro-ondes en solution de secours.
Le SCR-284 est très en avance sur son temps. Pour obtenir son excellente précision il utilise le balayage conique par lequel le faisceau tourne autour de l'axe de l'antenne pour détecter le maximum de signal, ce qui indique la direction vers laquelle l'antenne doit être tournée pour que ce maximum soit dans son axe et pointer précisément vers la cible. Le système n'est pas nouveau, il existait déjà sur le radar Würzburg allemand en 1941. Cependant le SCR-584 va plus loin en adjoignant un mode de poursuite automatique. Une fois que la cible est détectée et se trouve à portée, le radar se verrouille dessus automatiquement grâce à des servomoteurs installés dans la base de l'antenne.
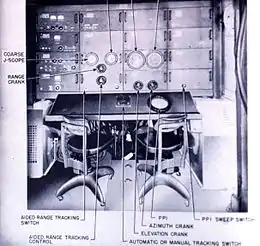
Le radar est utilisé avec quatre fréquences comprises entre 2,7 et 2,8 GHz (10 à 11 cm) en émettant des impulsions de 0,8 microseconde à une puissance de 300 kW. La fréquence de répétition des impulsions est de 1 707 impulsions par seconde. Il détecte des cibles de la taille d'un bombardier à 65 km et est capable d'engager une poursuite automatique à un distance de 30 km. La précision à cette distance était de 23 m en distance et 0,06 degré (1 mil) en azimut[4]. Les informations de distance sont affichées sur deux J–scopes[5] semblables au A–scope classique mais sur lesquels le résultat est affiché sous la forme d'un angle proportionnel au temps de retour de l'écho.
Pour la détection, par opposition à la poursuite, le radar possède un mode de balayage hélicoïdal qui permet la recherche des avions. Ce mode à un afficheur PPI (Plan Position Indicator) dédié qui facilite l'interprétation. Lorsqu'on est dans ce mode; l'antenne est entraînée mécaniquement à une vitesse de rotation azimutale de 4 tours par minute tout en assurant un mouvement de haut en bas et de bas en haut pour le balayage vertical.
Exploitation
Le premier radar opérationnel est livré en . Mais de nombreux problèmes administratifs retardent sa livraison sur le front. En , le SCR-584 est utilisé à Anzio pour la première fois en situation de combat. Rapidement, il joue un rôle capital en permettant de briser les attaques aériennes répétées de la Luftwaffe sur la tête de pont. Le SCR-584 est bien connu sur le front où il suit la troupe, il est aussi utilisé pour diriger les avions, localiser les véhicules ennemis (on rapporte qu'un radar a réussi à localiser des véhicules allemands à 26 km de distance) et suivre des trajectoires d'obus d'artillerie à la fois pour optimiser les tables balistiques des canons de 90 mm et pour préciser la position des batteries allemandes de tir de contre-batterie. Cependant le SCR-584 n'est pas déployé sur des lignes de front en mouvement, car on lui préfère des radars plus légers et moins précis comme l'AN/TPS-1.
Le SCR-584 fonctionne si bien qu'il est adapté pour l'US Navy. Le « CXBL », un prototype de la version navalisée, est installé sur le porte-avions USS Lexington en , et la version de série, le SM, fabriqué par General Electric, est mis en service sur les porte-avions USS Bunker Hill et USS Enterprise en . Le Radar SCR-784 est une version plus légère du même radar. La seule vraie différence est que ce dernier pesait 5 500 kg contre les 9 000 kg de la version originale.
Davenport rend étanches un certain nombre de ces radars, ce qui permet de les transporter pour le débarquement de Normandie en .
Après la guerre, le radar est transformé pour être utilisé dans les systèmes AN/MPQ-12 et AN/MPM-38 destinés au missile d'artillerie de campagne de l’US Army, le MGM-5 Corporal. Une version modifiée est également utilisée pour le contrôle et la poursuite (grâce à un transpondeur embarqué) du satellite espion Corona.
Bien qu'ils utilisent des tubes électroniques et un calculateur analogique, quelques spécimens du SCR-584 subsistent encore, par exemple, au National Severe Storms Laboratory à Norman (Oklahoma).
Le pointage automatique des armes (qui utilise le SCR-584, entre autres) et les fusées de proximité joue un rôle important dans l’Operation Diver[6], opération montée contre les V1 allemands. Ces deux dispositifs sont commandés par le AA Command (commandement britannique pour la lutte antiaérienne) et sont livrés en quantité à partir de , pour être positionnés sur la côte sud-est de l'Angleterre. Le déploiement anti-missile permet la destruction de 17 % des bombes volantes au cours de la première semaine. Ce chiffre est porté à 60 % le , et à 74 % pendant la dernière semaine du mois. Au cours d'une journée particulièrement remarquable, 82 % des V1 sont abattus. Le taux de réussite passe de 2 500 à 100 obus par V1.
En 1953 le SCR-584-Mod II est utilisé pour suivre le missile PGM-11 Redstone, sa portée ayant été étendue à 740 km par l'utilisation d'un émetteur-récepteur embarqué[7].
Remorque K-83
General Electric construit une remorque pour le SCR-584 appelé K-83. Le K-83 est conçu pour être attaché au crochet d'attelage d'un semi-remorque ce qui permet de tracter le SCR-584 à l'aide de véhicules plus légers.
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « SCR-584 radar » (voir la liste des auteurs).
- Le Radiation Laboratory appelé familièrement « Rad Lab » se trouvait au Massachusetts Institute of Technology (MIT) à Cambridge (Massachusetts) et a fonctionné d'octobre 1940 au 31 décembre 1945.
- [(en) https://www.nytimes.com/2011/10/01/science/01davenport.html?_r=1&ref=science Lee Davenport Dies at 95; Developed Battlefront Radar, New York Times, 30 septembre 2011].
- On appelle director un ordinateur mécanique ou électronique qui calcule en continu des solutions de tir trigonométriques pour une cible en mouvement et transmet les données pour le tir aux personnels servant l'arme.
- (en) Table SCR-584 Technical Characteristics
- Le J–scope est un système d'affichage circulaire sur lequel la distance à la cible est représentée sous forme d'un angle. Ce système permet une meilleure précision dans la lecture de la distance qu'avec un système linéaire sur une échelle (A–scope) car la totalité de la circonférence de l'afficheur présente une longueur supérieure à celle d'une échelle sur l'axe des abscisses (la longueur du tracé est ainsi fois plus grande). Une version électromécanique du J–scope équipait encore très récemment des sondeurs bathymétriques pour la navigation de plaisance. Voir affichage radar.
- Operation Diver était le nom de code britannique pour le système de contre-mesures contre les bombes volantes V1 envoyées par la Luftwaffe en 1944 contre Londres et d'autres régions de l'Angleterre. Le nom de code des V1 était « Diver ».
- (en) "The Evolution of Electronic Tracking", W.R. McMurran, NASA0TM-X-70077, 1973

- (en) The SCR-584 Radar, Electronics magazine, et
- (en) Manuels de service de l'armée américaine : FM 4-144, TM 11-1324, TM 11-1424, TM 11-1524, TM 9-2800, SNL G695 K-83 dolly (chariot) et SNL G698 K-78 trailer (remorque).