Sondeur bathymétrique
Un sondeur bathymétrique est un appareil servant à mesurer la profondeur.
Les sondeurs sont généralement acoustiques : la profondeur est déduite de la mesure du temps de trajet d'un signal acoustique réfléchi par le fond.
Il existe deux types de sondeurs acoustiques : les sondeurs monofaisceau et les sondeurs multifaisceaux.
Histoire
La pose d'un câble télégraphique transatlantique avec succès en 1866 a incité les savants à déterminer avec précision la profondeur des océans.
En 1876, le biologiste suisse Hermann Fol imagine l'appareil capable de mesurer cette profondeur, appelé piétromètre enregistreur basé sur un manomètre. Mais son appareil resta à l'état de projet[1].

L'année suivante, l'inventeur allemand Werner Siemens, imagine un nouvel appareil, appelé bathomètre, dont le principe repose sur le fait que l'intensité de la pesanteur d'un corps diminue proportionnellement à la densité des couches immédiatement sous-jacentes[2].
Sondeurs acoustiques monofaisceaux
Les sondeurs acoustiques les plus courants sont des sondeurs monofaisceau : le signal acoustique est émis vers le nadir par un transducteur à large ouverture (typiquement plus de 30°) et réfléchi par le fond ; l'écho est reçu par le même transducteur. Connaissant la célérité moyenne du son, la mesure du temps de parcours permet d'accéder à la profondeur minimale entre l'émetteur/récepteur et le fond.
Sondeurs acoustiques multifaisceaux
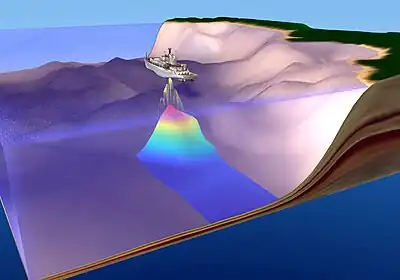
Les sondeurs acoustiques les plus modernes sont des sondeurs multifaisceaux, qui permettent en un seul passage (fauchée) de décrire la bathymétrie d'une bande pouvant atteindre plusieurs kilomètres de largeur. Le principe de la mesure est le suivant :
- un signal acoustique est émis par un transducteur (ou plutôt, généralement, un ensemble de transducteurs) à large ouverture angulaire latérale;
- le signal réfléchi par le fond est reçu par un réseau de transducteurs perpendiculaire à la coque du navire.
Par combinaison des signaux reçus par les transducteurs du réseau (formation de voies), on peut reconstituer le signal réfléchi par le fond dans des faisceaux angulaires étroits (de l'ordre de 1°, ou moins) : les sondeurs modernes peuvent ainsi former plusieurs dizaines ou plusieurs centaines de voies. À chaque signal émis ("ping") correspondent ainsi plusieurs dizaines ou plusieurs centaines de signaux reçus, chacun représentant le signal réfléchi par un secteur angulaire étroit, et donc une petite zone du fond ; sur chacun de ces signaux on peut mesurer :
- un temps de parcours, et donc, une distance oblique, d'où peut se déduire une profondeur à une position donnée si l'on connaît la géométrie de la mesure (position et attitude du navire)
- une intensité de signal, qui dépend de la géométrie de la mesure et de la réflectivité du fond (donc, de sa nature : roche, vase, etc.). La combinaison des informations reçues, pour des fauchées successives, permet de décrire très finement les profondeurs sur une largeur qui dépend de l'ouverture angulaire du sondeur (de quelques dizaines de mètres par faibles fonds, à plus de 20 km par grands fonds), mais aussi de constituer une image du fond représentative de la nature des fonds marins.
Autres techniques
Le plomb de sonde n'est plus utilisé depuis le milieu du XXe siècle, mais il fait toujours partie de l'équipement de sécurité obligatoire pour tout bateau à partir de la 4e catégorie[3]. C'est un lest profilé à l'extrémité d'une ligne graduée ; si l'on souhaitait connaître la nature du fond, une cavité du plomb pouvait recevoir une substance malléable - traditionnellement du suif - qui recueillait des particules de sédiment sur le fond (sable ou vase), ou restait marquée par la rugosité du fond.
Seules les techniques acoustiques sont utilisables dès que la profondeur à mesurer dépasse quelques dizaines de mètres. Par faibles fonds, d'autres techniques peuvent être employées, comme la bathymétrie laser, qui peut être mise en œuvre à partir d'un aéronef, et est basée sur la mesure de la différence de temps de parcours d'un même rayon lumineux réfléchi par la surface de la mer et par le fond : connaissant la géométrie de la mesure (position de l'émetteur, attitude, angle d'émission, etc.) et la célérité de la lumière dans l'eau de mer, on peut en déduire la profondeur et la position associée. Cette technique permet une bonne précision (jusqu'à quelques centimètres sur la verticale) et une très bonne résolution horizontale (meilleure que le mètre), mais elle est limitée aux faibles profondeurs (quelques dizaines de mètres, suivant la transparence de l'eau de mer et la couleur du laser choisi ; les meilleures pénétrations sont obtenues dans le bleu-vert).
Le sondeur de Thompson. Il est constitué de quatre parties: le plomb et l'avançon; l'enregistreur; la ligne (en acier) et enfin la machine à sonder. Le plomb est une masse en fer galvanisé visant à faire descendre le tout vers le fond. De forme conique, il est relié par une sardine en fer au reste du mécanisme. Celle-ci est reliée par un câble en acier jusqu'au tambour de stockage. À la base du plomb se trouve un creux, que l'on remplit de suif. Ainsi lorsque le plomb touche le sol, le suif s’imprègne de la nature du sol, et servira de preuve que le plomb a bien touché le sol lorsque l'opérateur remontera le plomb. Cet échantillon du fond permettra de connaître la nature du fond marin indispensable pour l'ancrage des navires.
Attaché à la ligne, l'enregistreur de profondeur est contenu dans un cylindre en laiton ouvert vers le bas, afin de permettre à l'eau d'entrer. L'enregistreur est un tube en verre de 1 m de long et d'un petit diamètre. Celui-ci est recouvert de chromate d'argent de couleur brune. Lors de l'immersion de la ligne, l'eau de mer entre dans le tube de verre à mesure que la ligne s'enfonce profondément. Une réaction chimique a alors lieu. Le chlorure de sodium présent dans l'eau de mer, attaque en longueur le chromate d'argent présent sur le tube en verre. Il y a alors formation de chlorure d'argent de coloration blanche. Grâce à la loi de Boyle-Mariotte, il nous est possible en mesurant la longueur de la tache de chlorure d'argent, de déterminer la profondeur. Une règle de profondeurs calculées à l'aide d'une formule est d'ailleurs fournie avec le sondeur. Il suffit donc d'appliquer cette règle contre la partie non décolorée du tube pour lire directement la profondeur relevée. La pression atmosphérique modifie de manière très légère les données lues sur cette règle, ainsi des corrections additives ou soustractives sont à appliquer aux lectures selon que la pression est supérieure ou inférieure à 754 mm de mercure (soit 1005 mbar).
Pour la température, on n'applique jamais de correction; cependant une trop grande différence de température entre l'air et l'eau de mer peut engendrer des erreurs de données. Il suffit alors de plonger le tube dans un seau d'eau de mer sur presque toute sa longueur en gardant l'extrémité ouverte vers le haut et en prenant garde de ne pas y faire entrer des gouttes d'eau.
La ligne, attachée d'une part à la manille et enroulée d'autre part sur la poulie est un fil d'acier de 500 mètres de long environ pesant 350 à 400 grammes par 100 mètres; avec un diamètre de 0,75 millimètre; et une charge de rupture supérieure à 100 kilogrammes lorsqu'elle est neuve. Afin de prévenir tout risque de rouille, la ligne est conservée dans un récipient d'eau et de chaux mélangées.
Enfin, la machine à sonder est composée d'une poulie en fonte à double réa, d'un compteur adapté au châssis de l'axe de la poulie, d'une caisse à double compartiments servant aussi de support et enfin d'un appareil de freinage à corde.
Un tel sondage nécessite 3 hommes. Le premier pour diriger les opérations, le deuxième pour s'occuper du plomb et de la ligne et enfin le troisième est responsable du frein. Il faut alors enduire de suif le plomb, remonter le tambour sur lequel la ligne est enroulée, vérifier le frein, introduire le tube de chromate d'argent dans la boite en laiton le long de la ligne. On déroule ensuite progressivement la ligne en mer en veillant à ce qu'il n'y ait ni de nœuds, ni de mou. Lorsque la ligne se met à mollir soudainement, le fond est alors atteint. Il faut alors remonter la ligne, vérifier la nature du sol incrusté dans le suif du plomb. Il ne reste alors plus qu'à sortir le tube de sa boite en laiton et d'en faire la lecture.
Remarques : L'entretien de la sonde est très important, à sa remontée la ligne est séchée, graissée et enroulée sur le tambour. Souvent, afin de faciliter la manœuvre de sondage, la machine est pourvue d'un moteur électrique.
Précautions d'utilisation pour la navigation
- Vérifier le zéro (quel tirant d'eau a été introduit en mémoire auparavant, le sondeur mesurant la profondeur sous la quille de manière générale)
- Choisir l'échelle adaptée à la mesure recherchée, dans l'incertitude, aller de la plus forte à la plus faible.
- Ajuster le gain d'amplification pour avoir un signal correct, ni trop fort ni trop faible.
- Ajuster le TVG pour des profondeurs entre 0 et 50 m. TVG mini réduira les signaux dans la zone proche du transducteur ou il peut y avoir des perturbations et bulles d'air.
- Observer l'échelle directement supérieure pour contrôler la mesure, en effet si le retour d'écho revient après le départ de l'impulsion suivante, il sera pris à tort pour une profondeur plus faible, alors qu'il n'en est rien.
- La vitesse de propagation du son dans l'eau peut varier en fonction de la température (de 1 450 m/s en eau douce et froide à 1 550 m/s en eau salée et chaude), ne pas prendre les indications du sondeurs pour vérités vraies. Ceci est d'ailleurs valable en général. Toujours recroiser les renseignements (Système de positionnement par satellites, Radar, Sondeur, observation astronomique, etc.).
- La précision usuelle d'un sondeur est de l'ordre de 3 % (c’est-à-dire que l'erreur sur la mesure est généralement inférieure à 3 % de la profondeur mesurée).
- connaître les paramètres géodésiques de la zone de sondage.
- tenir compte de la marée et la corriger par rapport au zéro géodésique (ellipsoïde) employé.
- connaître les paramètres DGPS en Z.
- utiliser une centrale d'attitude pour corriger les mouvements du mobile sur lequel est fixé la sonde (houle, roulis, tangage et pilonnement).
Notes et références
- Hermann Fol, « Un projet de bathomètre », La Nature, , p. 165 (lire en ligne)
- Louis Figuier, L'année scientifique et industrielle, Paris, Librairie de L. Hachette & Cie, (lire en ligne), p. 156 Le bathomètre ou instrument pour déterminer avec précision la profondeur de la mer
- Bloc marine