Rosalind Franklin (rover)
Le rover ExoMars, baptisé Rosalind Franklin, est un projet d'astromobile de l'Agence spatiale européenne dont l'objectif principal est la recherche de traces de vie passée à la surface de Mars. L'engin, développé dans le cadre du programme ExoMars, devait être lancé en 2022 par une fusée russe Proton fournie par l'agence spatiale russe Roscosmos, mais la mission a été suspendue jusqu'à nouvel ordre. Cette fusée devait également fournir le véhicule de rentrée atmosphérique et de descente qui doit déposer le rover sur le sol martien. Le rover ExoMars emporte plusieurs instruments, dont un mini laboratoire capable d'analyser les échantillons extraits du sous-sol martien par une foreuse. Il porte le nom de Rosalind Franklin, scientifique anglaise qui a œuvré à la découverte de la structure de l'ADN.
.jpg.webp)
| Organisation | Agence spatiale européenne et Roscosmos |
|---|---|
| Domaine | Étude in situ de Mars |
| Type de mission | Astromobile |
| Statut | En développement |
| Autres noms | Rosalind Franklin |
| Lancement | Août/octobre 2022 (très improbable) |
| Lanceur | Proton |
| Durée de vie | 218 jours martiens |
| Protection planétaire | Catégorie IVb[1] |
| Site | Site de l'Agence spatiale européenne |
| Masse au lancement | 2 600 kg dont 310 kg pour le rover |
|---|
| PanCam | Caméras |
|---|---|
| ISEM | Spectromètre infrarouge |
| CLUPI | Caméra |
| WISDOM | Radar |
| Adron | Détecteur de neutrons |
| Ma_MISS | Imageur multispectral |
| MicrOmega | Spectromètre imageur infrarouge |
| RLS | Spectromètre Raman |
| MOMA | Chromatographe-spectromètre de Masse |
Genèse
Au début des années 2000, un projet d'astromobile martien européen sous l'appellation d'ExoMars est mis à l'étude. Ce projet ambitieux est repoussé à plusieurs reprises car il nécessite à la fois des moyens financiers importants et la maîtrise des techniques d'atterrissage sur Mars. Il est inscrit en 2005 comme mission majeure (flagship mission) du programme Aurora. En , la NASA et l'Agence spatiale européenne (ESA) associent leurs projets d'exploration de la planète Mars dans le cadre de l'Initiative conjointe d'exploration de Mars. Cet accord prévoit le lancement de quatre engins spatiaux vers Mars dont le rover américain MAX-C. Mais courant 2011, ce partenariat est abandonné par la NASA qui est plongée dans de graves difficultés financières. L'Agence spatiale européenne ne peut financer seule le programme et elle propose à l'agence spatiale russe Roscosmos de remplir le rôle abandonné par la NASA. Au terme de l'accord mis au point en entre les deux agences, Roscosmos fournit deux lanceurs Proton et participe à la réalisation des trois engins spatiaux du programme :
- ExoMars Trace Gas Orbiter (TGO) est un orbiteur sous la responsabilité de l'ESA qui a pour mission primaire d'identifier l'origine du méthane et d'autres gaz rares présents dans l'atmosphère martienne. L'agence spatiale russe fournit plusieurs instruments scientifiques. TGO (ExoMars Trace Gas Orbiter) a été lancé en 2016 avec ExoMars EDM (Entry, Descent and Landing Demonstrator Module) ;
- ExoMars EDM est un atterrisseur développé par l'ESA qui devait se poser en 2016 sur la planète Mars. ExoMars EDM devait permettre de valider les techniques de rentrée atmosphérique et d'atterrissage qui seront mises en œuvre par de futures missions martiennes européennes, mais la sonde s'est écrasée sur la surface de Mars après une erreur du système de guidage, qui a pris la décision de couper le parachute durant la descente ;
- le rover ExoMars. La Russie fournit le véhicule de rentrée et de descente sur le sol martien Kazatchok (en) ;
- l'atterrisseur Kazatchok, qui, après avoir déposé le rover, fonctionnera comme sonde spatiale fixe, étant équipé de ses propres instruments.
Déroulement du projet
Sélection des industriels
En , une première réunion a lieu entre les différents industriels impliqués dans le projet notamment pour effectuer une première définition des interfaces entre les composants des sondes spatiales. Les participants sont Thales Alenia Space Italie, responsable de l'ensemble du projet ExoMars, Astrium Royaume-Uni qui développe le rover, l'Agence spatiale européenne (ESA), l'Agence spatiale italienne, Lavotchkine, constructeur russe du module de descente et d'atterrissage du rover, Khrounitchev le fabricant du lanceur Proton et le centre de recherche spatial russe Russian Space Research Institute qui coordonne la fourniture des instruments scientifiques de ce pays[2].
Changement de désignation
À la suite d'un concours lancé par l'agence spatiale britannique le , l'ESA officialise le nom du rover le . Il s'appelle désormais Rosalind-Franklin, en l'honneur de cette physico-chimiste britannique qui a œuvré à la découverte de la structure de l'ADN. Ce nom a été sélectionné parmi les 36 000 propositions reçues des citoyens provenant des différents pays membres de l'Agence spatiale européenne[3] - [4].
Fin du partenariat avec la Russie (mars 2022)
À la suite de l'invasion de l'Ukraine en 2022, les relations entre l'Union européenne (UE) et la Russie se dégradent, et partant la collaboration entre Roscosmos et l'ESA. D'après cette dernière, un lancement en 2022 semble « très improbable »[5]. Le , l'ESA annonce, dans le cadre des sanctions contre la Russie, qu’elle suspend sa collaboration avec Roscomos sur ce projet. Son directeur estime que le lancement pourrait avoir lieu au mieux en 2026[6]. En cas de rupture définitive de coopération avec la Russie, le programme pourrait être retardé au moins jusqu'en 2028, l'atterrisseur russe actuel du rover Kazatchok (en) devant être reconstruit par les partenaires de l'ESA, tout comme les éléments chauffants à radioisotope russes[7].
Nouveau plan (novembre 2022)
Le 23 novembre 2022, les responsables de l'Agence spatiale européenne, réunis pour la conférence ministérielle annuelle, décident de poursuivre le projet malgré l'abandon du partenariat avec la Russie et dégagent les moyens financiers pour y parvenir. Selon le scénario retenu, les composants que devaient fournir la Russie (d'un montant de 725 millions $), notamment l'atterrisseur, seront fournis par les industriels européens avec quelques exceptions. Ainsi les huit éléments chauffants à radioisotope utilisant du plutonium 238 seront fournis par la NASA, ce qui aura pour conséquence que le lancement sera pris en charge par une fusée américaine (ces composants ne sont pas exportables). La NASA donne un avis favorable à ce nouveau plan, mais n'a pas encore formalisé son accord en [8].
Objectifs
- rechercher des indices d'une vie passée ou présente sur la planète Mars ;
- étudier l'environnement géochimique des couches superficielles du sous-sol martien, en particulier la présence d'eau ;
- étudier les gaz présents à l'état de trace dans l'atmosphère martienne ;
- caractériser l'environnement à la surface de Mars.
Sélection du site d'atterrissage
Un groupe de travail d'une trentaine de spécialistes, le LSSWG (Landing Site Selection Working Group) a été formé en 2013 pour choisir le site d'atterrissage du rover ExoMars. Il comprend des membres du groupe de travail scientifique du rover (ESWT pour ExoMars Science Working Team), des représentants du groupe chargé de la protection planétaire (Planetary Protection Working Group ou PPWG) ainsi que des représentants des industriels impliqués dans le projet[10]. Un appel à propositions a été lancé fin 2013 pour la sélection du site. Celui-ci doit présenter les caractéristiques suivantes[11] :
- le site doit être ancien (plus de 3,6 milliards d'années) ;
- le site doit présenter de nombreux indices au niveau de sa morphologie et de sa minéralogie prouvant qu'il a connu des activités impliquant la présence d'eau à plusieurs reprises sur des périodes prolongées ;
- le site doit comporter des affleurements comportant des couches de roches sédimentaires ;
- les affleurements doivent être répartis sur l'ensemble de la zone d'atterrissage pour permettre au rover d'atteindre certains d'entre eux compte tenu de son autonomie limitée théoriquement à quelques kilomètres ;
- le site doit être recouvert par une faible épaisseur de poussière.
Un premier atelier a eu lieu en à Madrid. Le groupe de travail a retenu quatre des huit propositions initiales. Tous les sites sont situés près de l'équateur martien[12] :
- Mawrth Vallis ;
- Oxia Planum ;
- Hypanis Vallis (en) ;
- Aram Dorsum (it).
Le site identifié par l'Agence spatiale européenne en est Oxia Planum. Son sol est argileux, est âgé de quatre milliards d'années. Ce site a notamment été choisi parce que les scientifiques sont convaincus que « les sédiments à grains fins, déposés pendant l'ancienne époque noachienne, ont pu conserver la preuve de l'existence de micro-organismes dans ce milieu favorable et qu'ils sont aussi adaptés à la foreuse du rover ExoMars 2020 ». À cela s'ajoute que les spectromètres infrarouges de Mars Express et Mars Reconnaissance Orbiter ont montré la présence d'argiles et d'autres minéraux qui sont autant d'indices sur le passé humide de la planète[13].
Caractéristiques techniques
Véhicules de croisière et de descente
La sonde spatiale d'une masse totale de 2,6 tonnes comprend de manière classique :
- un module de croisière chargé de gérer la phase de vol comprise entre le lancement et l'arrivée à la limite de l'atmosphère martienne ;
- un module de descente, qui doit ralentir la sonde spatiale durant la rentrée atmosphérique et poser le rover en douceur sur le sol martien. Il comprend principalement un bouclier thermique pouvant résister à l'échauffement durant la phase de traversée de l'atmosphère, un système de parachute et un système d'atterrissage ;
- le rover, qui emporte plusieurs instruments ainsi qu'un bras muni d'une foreuse et d'un système de recueil d'échantillon.
Le tableau suivant présente les spécifications des éléments de la mission avant l'abandon de la collaboration entre l'ESA et Roscosmos.
| Composant | Masse | Agence spatiale | Industriel |
|---|---|---|---|
| Module de croisière | 400 kg | Agence spatiale européenne | |
| Ergols | 50 kg | ||
| Système de séparation | 50 kg | Roscosmos ? | |
| Module de descente | 1 790 kg | Roscosmos | Lavotchkine |
| Rover | 310 kg | Agence spatiale européenne | Airbus Royaume-Uni |
| Ensemble de la sonde spatiale | 2 600 kg |
Rover
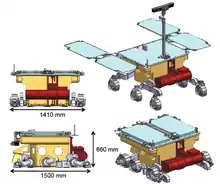
Le rover ExoMars, d'une masse d'environ 300 kg, se caractérise par sa mobilité et par sa capacité à forer et à recueillir un échantillon de sol martien puis à le traiter à l'aide d'un des trois instruments scientifiques formant le laboratoire Pasteur. Il comporte une suite d'instruments scientifiques permettant d'effectuer des recherches dans les domaines de l'exobiologie et de la géochimie. L'énergie est fournie par des panneaux solaires. Le rover comprend un mât sur lequel sont montés certains instruments dont les caméras principales, un bras muni d'une foreuse et de quelques instruments. Il possède six roues montées sur trois bogies indépendants[15].
Instruments scientifiques
La charge utile comprend neuf instruments scientifiques représentant une masse totale de 26 kg dont deux instruments panoramiques (PanCam (en) et WISDOM (en)), quatre instruments effectuant des analyses au contact (CLUPI (en), RLS (en), Ma_Miss (en) et Adron (en)) et trois instruments d'analyse des échantillons qui seront collectés par la foreuse du rover en surface et en profondeur jusqu'à deux mètres (MicrOmega (en), ISEM (en) et MOMA (en)). Les instruments Adron et ISEM sont fournis par la Russie[16].
Chromatographe-spectromètre de masse MOMA
MOMA (Mars Organic Molecule Analyser) est un instrument destiné à l'analyse moléculaire des échantillons collectés par la foreuse du rover, portant un intérêt particulier à l'analyse des molécules organiques. Cet instrument comprend un spectromètre de masse développé par un laboratoire du Goddard Space Flight Center de la NASA, couplé à un chromatographe en phase gazeuse développé par un consortium de trois laboratoires français (LISA, LATMOS et LGPM) et à un laser développé par la société allemande LZH. Cet ensemble instrumental permet l'utilisation de deux modes d'analyse des échantillons : le mode désorption/ionisation laser spectrométrie de masse, qui donne accès à des molécules organiques de poids moléculaires élevés ; le mode chromatographie en phase gazeuse couplée à la spectrométrie de masse, qui donne accès à l'analyse de molécules volatiles ou vaporisables. Ces deux modes sont complémentaires et permettent de détecter une large gamme de molécules organiques en vue de rechercher des espèces chimiques d'intérêt pour la vie. Cet instrument, qui est le plus important embarqué par le rover, est réalisé sous la supervision de l'Institut Max Planck pour l'étude du Système solaire, situé à Göttingen (Allemagne)[17].
Spectroscope Raman
Le spectroscope laser Raman RLS (Raman Laser Spectrometer) réalise à l'aide d'un laser l'analyse à distance de la composition des roches. Il est utilisé pour identifier les composants organiques et rechercher les indices de vie, pour identifier les minéraux et les indicateurs d'une activité biologique, pour caractériser les phases minérales produites par des processus liés à la présence d'eau et pour caractériser les minéraux ignés et les produits résultant d'un processus d'altération. L'instrument d'une masse de 2 kg est développé sous la supervision du Centro de Astrobiología (Espagne)[18].
Spectroscope infrarouge MicrOmega
Le spectromètre imageur infrarouge MicrOmega fait partie avec MOMA et RLS, des instruments chargés d'analyser les échantillons de sol martien prélevés par la foreuse. Il fournit à l'échelle d'un grain la composition moléculaire et minéralogique. Les images monochromatiques sont obtenues avec une résolution de 20 × 20 µm/pixel avec une résolution spectrale élevée pour les longueurs d'onde comprises entre 0,9 et 3,5 µm. Il est développé sous la supervision de l'Institut d'Astrophysique Spatiale (France)[19].
Caméras PanCam
PanCam (Panoramic Camera) comprend trois caméras installées dans le mât du rover : deux caméras avec un objectif grand angle (champ optique de 37°, focale fixe) constituent les yeux du rover et sont équipés de 12 filtres. Une caméra équipée d'un téléobjectif avec un champ optique de 5° fournit des images en couleur à haute définition. La fourniture de l'instrument est placée sous la supervision de l'University College London (Royaume-Uni)[20].
ADRON-RM
ADRON-RM est un détecteur de neutrons utilisé pour identifier et quantifier la présence d'hydrogène contenu dans la couche superficielle (moins de 1 m) du sol martien : eau ou glace d'eau et molécules OH et H2O présentes dans les minéraux hydratés. Le détecteur peut fonctionner de manière passive ou active. L'instrument est développé par l'institut de recherche spatial russe IKI[21].
Imageur multispectral Ma_MISS
Ma_MISS (Mars Multispectral Imager for Subsurface Studies) est un spectromètre imageur dont la partie optique est installée à l'intérieur du foret qui fournit des informations sur la stratigraphie, la distribution et l'état des minéraux associés à la présence d'eau. La partie optique comprend une source lumineuse dont la lumière est réfléchie par la paroi du trou foré et qui est analysée au fur et à mesure de l'enfoncement. Le spectre analysé est compris entre 0,4 et 2,2 µm et la résolution spectrale atteint 20 µm. L'instrument est développé sous la supervision de l'Instituto di Astrofisica Spaziale e Fisica Cosmica (Italie)[22].
Radar WISDOM
WISDOM (Water Ice and Subsurface Deposit Observation on Mars) est un radar à pénétration permettant de détecter la présence de dépôts de glace d'eau dans le sous-sol proche de la surface ou des objets denses tels que des roches. Un de ses buts est de détecter d'éventuels obstacles au forage jusqu'à deux mètres de profondeur qu'effectuera le rover. L'instrument est développé sous la supervision du laboratoire LATMOS (France)[23].
Caméra microscope CLUPI
La caméra CLUPI (Close-UP Imager) est un instrument monté sur le bras de la foreuse qui fournit des images en couleur en gros plan des roches, des falaises et du sol. Les images peuvent être prises d'une distance comprise entre 10 cm et l'infini avec une résolution comprise entre 7 µm par pixel à 10 cm de distance et 79 µm à 1 m de distance. Le capteur CCD a une définition de 2 652 × 1 768 pixels. Le responsable scientifique de l'instrument fait partie de l'Institut d'exploration spatiale de Neuchâtel (Suisse)[24].
Spectromètre infrarouge ISEM
Le spectromètre infrarouge ISEM (Infrared Spectrometer for ExoMars) est un instrument monté sur le mât du rover qui est utilisé pour déterminer à distance la composition minéralogique des rochers, des falaises et du sol. Sa partie optique a un champ de 1° et peut être orientée en azimut et en élévation. Le spectromètre analyse le spectre électromagnétique entre 1,15 et 3,3 micromètres. L'instrument d'une masse de 1,3 kg est fourni par l'institut IKI russe[25].
Foreuse et système de distribution des échantillons
Le rover dispose d'une foreuse capable de prélever des carottes jusqu'à une profondeur de deux mètres. Elle est capable de pénétrer dans le sol martien et d'y prélever une carotte d'un centimètre de diamètre et de 3 cm de long puis de transférer cet échantillon dans le mini laboratoire du rover. Le senseur de l'instrument Ma_MISS, un spectromètre infrarouge miniaturisé, est monté sur la tête de la foreuse pour permettre l'étude du forage. La foreuse est conçue pour permettre de travailler dans les différents sols qui sont envisagés pour la mission. Elle doit pouvoir effectuer sept forages plus deux d'une profondeur de deux mètres avec recueil de quatre carottes à chaque sondage profond. La foreuse comprend[26] :
- une tête de forage de 70 cm de long qui inclut le système permettant de recueillir la carotte et la tête de lecture du spectromètre ;
- trois tiges de 50 cm de long permettant à la tête de forage d'atteindre la profondeur de 2 m ;
- le moteur qui imprime le mouvement de rotation au système de forage ;
- une structure située sur le flanc du rover, dans laquelle la foreuse est rangée lorsqu'elle n'est pas utilisée.
Déroulement de la mission
Lancement, péripéties et transit vers Mars
Initialement, le lancement doit être effectué par une fusée russe Proton et la sonde doit arriver sur la planète Mars neuf mois plus tard, vers le . Du lancement jusqu'à l'atterrissage, le rover doit être installé sur une palette unique installée dans un ensemble formé par l'étage de croisière. Le véhicule de rentrée atmosphérique avec son bouclier thermique et l'étage de descente est fourni par Roscosmos, l'agence spatiale russe, avec une contribution de l'ESA[27].
Le lancement de la sonde n'est possible que lors de courtes fenêtres de lancement qui n'arrivent que tous les 26 mois. De multiples soucis techniques, notamment sur la fiabilité du système de parachutes, ont empêché le lancement de la sonde durant les fenêtres ouvertes en puis en . Des problèmes de ralentissement d'activités liées à la pandémie de Covid-19 ont notamment été avancés par l'Agence spatiale européenne (ESA) et Roscosmos[28]. Alors que la fenêtre suivante ouverte en semblait être la bonne, les problèmes techniques majeurs ayant été résolus, le déclenchement de l'invasion de l'Ukraine par les forces militaires russes en ont conduit à l'arrêt des collaborations entre l'ESA et Roscomos, à de rares exceptions près. Le lancement devant initialement être effectué par une fusée russe depuis le Kazakstan et le rover n'ayant pas été transporté sur le site de lancement, le lancement n'a pas eu lieu. Le rover se trouve donc alors à Turin, où il a été intégré[29] - [30].
Sauf évolution extrêmement rapide de la situation politique liée à la guerre russo-ukrainienne, dans des termes qui conviendraient à l'Union européenne, il est peu probable qu'une collaboration entre l'ESA et Roscosmos puisse reprendre sur ce projet. L'agence spatiale russe étant originellement responsable de la plateforme d'atterrissage du rover et des sources radioactives permettant de chauffer l'intérieur du rover européen, l'ESA doit à présent trouver une manière de pallier le retrait de la contribution russe au projet, sur une durée devant rester raisonnable pour que le rover et ses instruments ne deviennent pas obsolètes. Compte tenu que l'Europe n'a pas ses propres sources de chaleur radioactives pour le spatial, et ne dispose pas de système d'atterrissage d'un rover, la solution la plus viable reste l'appel à contribution d'un ou de plusieurs partenaires fiables ayant la capacité de fournir ou d'aider au développement rapides de ces technologies en Europe. L'ESA a donc fait appel à la NASA dans une opération d'aide à Exomars en avançant la collaboration étroite actuelle des deux agences dans le cadre de la mission Mars Sample Return, et la redéfinition de cette dernière mission avec l'abandon du fetch rover européen qui permet à la NASA de réaliser l'économie d'un lancement. Si la NASA a signifié son intérêt auprès de l'ESA en 2022 pour cette opération, la décision finale ne sera adressée par l'agence américaine que début 2023 et la consolidation de son budget. Pour l'ensemble de ces raisons, un lancement en 2024 semble totalement exclu aujourd'hui car le rover et la plateforme devraient être prêts fin 2023. Restent les fenêtres de 2026, 2028 et 2030 qui sont étudiées par l'ESA mais pour les mêmes raisons que celle avancées pour 2024, les développements techniques requis pour la mission ne semblent pas en adéquation avec un lancement pour 2026. La conférence ministérielle de l'ESA du 22-23 novembre 2022 confirme la mise en place de ce scénario du côté de l'ESA, prévoyant un lancement en 2028 impliquant une contribution américaine importante pour l'aide au développement de la plateforme d'atterrissage, la fourniture des RHU pour le rover, et la prise en charge du lancement. Si du côté européen tout est réglé, l'ESA est dans l'attente de la confirmation d'une participation ferme de la NASA, qui ne sera connue que début 2023 quand la consolidation du budget NASA sera décidée.
Une autre conséquence de la rupture de la collaboration entre l'ESA et Roscosmos est la demande de retourner les instruments russes (ADRON et ISEM) du rover en Russie, ainsi que l'atterrisseur Kazachok[27], qui embarque une dizaine d'instruments dont deux fournis par des pays membre de l'ESA. Si le retrait des deux instruments du rover ne remet pas en question sa capacité à mener sa mission principale, le retrait de l'atterrisseur et de ses instruments laisse des scientifiques et ingénieurs européens de ce projet sans plus aucune contribution car l'attendrisseur que pourrait développer l'ESA avec la NASA ne devrait pas embarquer de l'instrumentation pour garder son développement le plus simple possible afin de respecter les temps de développement et limiter son coût.
Exploration du sol martien
La durée nominale de la mission est de 180 sols (jours martiens). La mission est constituée de cycles d'expérimentation : chaque cycle comprend le repérage d'un lieu présentant un intérêt scientifique, le déplacement jusqu'à celui-ci, la mise en œuvre des instruments scientifiques et enfin la transmission vers la Terre des données scientifiques. Les instruments optiques, radar et infrarouge permettent d'effectuer des repérages dans un cercle d'environ 20 mètres autour du rover. Celui-ci a la capacité de parcourir plusieurs kilomètres entre deux sites intéressants mais il est probable que la distance entre deux sites sera généralement comprise entre 100 et 500 mètres[27].
Notes et références
- (en) « Solar System Missions », sur Office of Planetary Protection, NASA (consulté le ).
- (en) Anatoly Zak, « ExoMars-2016 mission », sur russianspaceweb.com (consulté le ).
- (en-GB) « Name Europe's robot to roam and search for life on Mars », sur exploration.esa.int (consulté le ).
- (en-GB) esa, « ESA’s Mars rover has a name – Rosalind Franklin », sur Agence spatiale européenne (consulté le ).
- (en-GB) « ESA statement regarding cooperation with Russia following a meeting with Member States on 28 February 2022 », no 6–2022, sur Agence spatiale européenne (consulté le ).
- Philippe Volvert, « L’Europe suspend sa collaboration avec la Russie pour la mission Exomars 2022 », (consulté le ).
- (en) Jeff Foust, « ExoMars official says launch unlikely before 2028 », sur Spacenews, (consulté le ).
- (en) « ESA’s ExoMars plans depend on NASA contributions », sur Spacenews, .
- (en) « Scientific objectives of the ExoMars Rover », sur Agence spatiale européenne (consulté le ).
- (en) « ExoMars 2018 Landing Site Selection Working Group », Agence spatiale européenne (consulté le ).
- (en) « Call for ExoMars 2018 Landing Site Selection », Agence spatiale européenne (consulté le ).
- (en) « Four candidate landing sites for ExoMars 2018 », Agence spatiale européenne, .
- Futura, « ExoMars 2020 : Oxia Planum est le site favori pour faire atterrir le rover », sur Futura (consulté le ).
- (en) Anatoly Zak, « ExoMars-2020 (formerly ExoMars-2018) », sur russianspaceweb.com, (consulté le ).
- (en) « ExoMars Rover », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite > MOMA - Mars Organics Molecule Analyser », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite > RLS - Raman Spectrometer », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite > The MicrOmega Infrared Spectrometer », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite > PanCam - the Panoramic Camera », Agence spatiale européenne (consulté le ).
- (en) Igor Mitrofanov et Sergey Nikiforov, « Instrument Adron-RM for ExoMars 2018 »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), Agence spatiale européenne, .
- (en) « The ExoMars Rover Instrument Suite > Ma_MISS - Mars Multispectral Imager for Subsurface Studies », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite > WISDOM - Water Ice and Subsurface Deposit Observation on Mars », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite > CLUPI - Close-UP Imager », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars Rover Instrument Suite > ISEM - Infrared Spectrometer for ExoMars », Agence spatiale européenne (consulté le ).
- (en) « The ExoMars drill unit », sur Agence spatiale européenne (consulté le ).
- (en) « ExoMars Rovers Mission (2018) », sur ESA (consulté le ).
- (en) « Second ExoMars mission moves to next launch opportunity in 2020 », sur European Space Agency (consulté le ).
- Pierre Barthélémy, « Espace : la mission ExoMars repoussée de deux ans », Le Monde, (lire en ligne).
- « C’est en 2022 qu’ExoMars décollera pour la planète rouge », Communiqué de presse, sur Agence spatiale européenne, .
Voir aussi
Sélection du site d'atterrissage
- (en) ESA, ExoMars 2018 Landing Site Proposal Guide & Template, Agence spatiale européenne, , 5 p. (lire en ligne).
- (en) ESA, ExoMars 2018 Landing site selection : User's manual, Agence spatiale européenne, , 19 p. (lire en ligne).
Historique du projet
- (en) Paolo Ulivi et David M. Harland, Robotic exploration of the solar system : Part 4 : the Modern Era 2004-2013, Springer Praxis, , 567 p. (ISBN 978-1-4614-4811-2).
Articles connexes
- Programme ExoMars qui englobe les quatre missions martiennes dont ExoMars EDM
- ExoMars Trace Gas Orbiter Orbiteur martien faisant partie du programme
- Mars Science Laboratory le rover martien de la NASA lancé fin 2011.
- Mars Exploration Rover, les deux rovers de la NASA de 2003 qui ont démontré les capacités de ce type d'engin.
Liens externes
- (en) Page de la mission, Agence spatiale européenne
- (en) Présentation du programme ExoMars par le constructeur Thales Alenia ()