Grandeur d'orientation
Une grandeur d'orientation est une grandeur physique qui se limite à décrire l'orientation de la grandeur physique scalaire associée, suivant l'un des quatre éléments d'un groupe de Klein, interprété ici comme trois grandeurs à caractère directionnel 1x, 1y et 1z, susceptibles de représenter trois sortes d'orientation différentes, et la grandeur 10, élément neutre du groupe représentant un scalaire. Dans l'analyse dimensionnelle standard, la dimension de cette grandeur est « sans unité », et elle ne joue pas de rôle. Une interprétation possible de cette extension par le groupe de Klein est de considérer que les grandeurs physiques ne sont pas uniquement caractérisées à travers les grandeurs des unités de base du Système international, mais également par une « grandeur d'orientation » donnant une information sur leur rapport à la dimensionnalité spatiale.
Cette approche conduit en particulier à attribuer au radian une grandeur d'orientation intrinsèque non scalaire, ce qui permet de formaliser simplement l'analogie entre rotation et translation, et la différence intrinsèque entre grandeur physique de mêmes unités de base en USI mais néanmoins incommensurables, comme le couple et le travail, ou la fréquence et la vitesse de rotation. Plus généralement, n'importe quelle grandeur physique dérivée peut de même, de proche en proche, être caractérisée par une certaine grandeur d'orientation, utilisable en tant que telle dans une équation aux dimensions.
Une autre approche consiste à attribuer à un paramètre physique, intervenant dans un problème particulier, une certaine grandeur d'orientation, traduisant cette fois-ci l'orientation géométrique suivant laquelle cette grandeur intervient dans le problème. Elle permet d'affiner l'analyse dimensionnelle du problème en lui donnant une perspective spatiale, ce qui permet notamment de prendre en compte l'effet de rotations angulaires, et permet de distinguer l'effet de la contrainte d'homogénéité qu'impose l'analyse dimensionnelle sur les trois directions de l'espace. Dans le cas où cette grandeur physique est vectorielle ou un pseudovecteur, la grandeur d'orientation traduit une information sur l'orientation du vecteur correspondant, par rapport au problème initial.
Ces deux approches peuvent être simultanément employées, mais ne doivent pas être confondues.
Historique
Quelle est la dimension d'un angle ?
L'idée qu'une dimension particulière puisse être associée aux mesures angulaires n'est pas nouvelle, mais se heurte à des difficultés. Pour Maxwell[1], l'analyse dimensionnelle permet en particulier de se rendre indépendant du choix d'un système d'unité particulier, en permettant de traduire la valeur numérique d'une mesure physique d'un système à l'autre :
- « Connaissant la dimension de n'importe quelle mesure physique, nous pouvons immédiatement déduire sa valeur numérique exprimée dans un système d'unité à partir de sa valeur numérique exprimée dans un autre système. »
De ce point de vue, l'équation aux dimensions d'une grandeur physique décrit donc la manière dont cette mesure varie suivant le choix de l'unité, ou est relié au choix déjà fait d'unités fondamentales de ce système. Dans ce cas, il est logique qu'une dimensionnalité puisse également être attribuée aux mesures angulaires :
- « Puisque la mesure d'un angle dépend du choix d'une unité (degré ou radian) et que le choix de cette unité est indépendant du choix fait pour les autres unités de base, on peut conclure qu'un "angle" n'est pas "sans unité", mais que les dimensions [θ] et [Ω] des angles plans et solides sont ordinairement supprimées ou négligées. »
Il est relativement facile de montrer que l'unité attribuée à un angle doit alors être telle que , mais en déduire que est une restriction non justifiée. Il suffit que [θ] soit une racine carrée de l'unité, comme on en trouve dans les nombres complexes et les quaternions[2].
![{\displaystyle [\theta ]^{2}=1}](https://img.franco.wiki/i/a49d5982e3e2e7b0617669d92f2a53e2b75db047.svg)
![{\displaystyle [\theta ]=1}](https://img.franco.wiki/i/b52c23add59f1912f624ac15b59ea4972da94629.svg)
Approche projectionnelle
Une extension proposée par Huntley[3] à l'analyse dimensionnelle consiste à considérer que les trois composantes d'un vecteur doivent être considérés comme relevant de grandeurs distinctes. Dans ce cas, au lieu de n'avoir qu'une longueur L indifférenciée, on aura une longueur Lx dans la direction des x, et ainsi de suite.
On voit donc que cette approche consiste à ramener un problème situé dans l'espace de dimension trois à plusieurs problèmes dans des espaces linéaires de dimension un. La justification profonde d'une telle approche est que chaque composante d'une équation dimensionnellement consistante doit lui-même être dimensionnellement consistant, que l'équation soit scalaire, vectorielle ou tensorielle. Par conséquent, en projetant le problème sur l'un ou l'autre de ses axes de symétrie, on peut (parfois) identifier des équations indépendantes, et chaque équation supplémentaire permettra de résoudre une nouvelle variable.
Bien que souvent utile, donc, cette extension de la méthode proposée par Huntley présente encore quelques insuffisances :
- Elle ne gère pas bien les situations impliquant des produits vectoriels ;
- Il n'est pas toujours facile d'assigner aux différentes variables du problème ces grandeurs L, Lx, Ly et Lz, c'est-à-dire d'identifier des axes de projection pertinents ;
- Elle ne permet surtout pas de gérer les angles considérés comme des variables physiques.
Plutôt que d'introduire seulement trois dimensions de longueur Lx d'orientation distinctes, comme proposé par Huntley[3], Donald Siano[4] - [5] a proposé pour représenter le caractère vectoriel de certaines grandeurs de retenir comme grandeur à part entière des « grandeurs d'orientation » 1x, 1y et 1z dans l'équation aux dimensions, le symbole représentant de son côté une grandeur scalaire sans orientation. Avec cette approche, la dimension projetée proposée par Huntley devient une grandeur dérivée composée L·1x, où L traduit le caractère de « longueur », et 1x traduit le caractère d'« orientation » dans une direction particulière, donc le caractère essentiellement vectoriel de cette grandeur.


Dans les formules dimensionnelles, les grandeurs scalaires ont alors une dimension de 10 quelle que soit la direction de l'espace où elles sont projetés, mais les grandeurs vectorielles reçoivent une dimension d'orientation non nulle — dont le choix en x, y, z est relativement arbitraire tant que ces choix se simplifient dans l'équation aux dimensions. La direction peut être par exemple « celle du problème » 1x lorsqu'une seule direction est impliquée, mais devient « l'autre direction du plan » 1y lorsqu'une deuxième intervient, et « la direction orthogonale aux deux autres » 1z, en tant que de besoin.
Algèbre des orientations
Avec cette convention, Siano[5] montre que ces symboles d'orientation suivent une algèbre propre, celle du groupe de Klein pour sa loi additive, donnée par :
- est l'élément neutre, donc . Ceci reflète le fait que la multiplication par un scalaire ne change pas l'orientation d'un vecteur.
- Chaque élément est son propre inverse, donc . Ceci reflète le fait que pour le produit scalaire de deux vecteurs, dont l'un est d'orientation , la seule composante du second qui intervient est la projection du second sur cette même orientation , toutes les autres composantes ayant une contribution nulle ; et le résultat est un scalaire d'orientation 10. La conséquence est donc que : , et , c'est-à-dire que seule la parité de l'orientation intervient dans la dimension d'une unité.
- La composée de deux grandeurs d'orientation différente (non scalaires) donne la troisième, c'est-à-dire pour les indices différents et non nuls. Ceci reflète le fait que dans le produit vectoriel de deux vecteurs, dont l'un est d'orientation , la seule composante du second qui intervient est la composante orthogonale d'orientation , la composante parallèle ayant une contribution nulle ; et le résultat est un nouveau vecteur d'orientation perpendiculaire aux deux premiers, donc d'orientation . Noter cependant que contrairement au produit vectoriel, la multiplication est commutative, le résultat ne change pas de signe lorsqu'on permute les deux orientations (puisqu'une orientation est son propre inverse) : .









Les grandeurs d'orientation présentent donc une forte analogie avec l'algèbre des quaternions, la différence essentielle étant que là où le produit de quaternions comporte un signe négatif traduisant une orientation des directions de l'espace dans un sens particulier, le produit des grandeurs d'orientation est toujours positif, distinguant entre trois dimensions, mais sans en préciser le sens.
Dimension d'une rotation
Avec ces considérations, Siano[5] montre que l'angle, sans avoir une « dimension » au sens habituel du terme, peut cependant être porteur d'une « grandeur d'orientation » sans dimension, sur le plan géométrique.
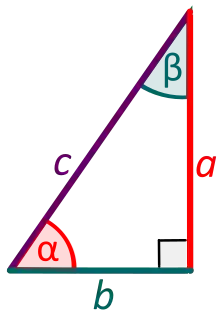
Considérons en effet la figure géométrique classique d'un triangle rectangle, sur laquelle sont définies les différentes fonctions trigonométriques : par rapport à l'axe des x, un rayon du cercle unitaire fait un angle α. Le côté adjacent du triangle est une longueur portée par le premier axe des x, et a donc pour grandeur d'orientation géométrique L·1x. Le côté opposé est dans une direction perpendiculaire portée par un second axe des y, et a donc pour grandeur d'orientation géométrique L·1y. Par conséquent, la tangente de l'angle α, qui est le rapport du côté opposé au côté adjacent, a pour grandeur d'orientation géométrique .

De toute évidence, la fonction mathématique "tangente" ne peut pas par elle-même imposer une dimension à son résultat, fût-elle limitée à une grandeur d'orientation. Cette grandeur est donc héritée de la dimension propre que doit, par conséquent, avoir l'angle α.
Cette dimension d'orientation d'un angle doit en particulier laisser homogène la formule du développement de la fonction en série de Taylor :

Si donc une tangente est de dimension d'orientation 1z, l'angle α doit donc nécessairement avoir cette même direction d'orientation 1z. Ceci n'est possible que parce que cette dimension est son propre inverse : comme tous les termes en α sont de puissance impaire dans ce développement en série, ils ont tous la même dimension d'orientation 1z, et l'ensemble de la somme est donc dans ce cas de dimension homogène. Ce ne peut pas être le cas pour des dimensions classiques comme les longueurs ou les masses, parce que ces grandeurs n'étant pas leur propre inverse, la série ne serait pas homogène et n'a donc pas de sens physique ; c'est pour cette raison qu'en général, une fonction mathématique ne peut s'appliquer qu'à une variable sans dimension.
Pour être parfaitement exact, ce n'est pas l'angle plan proprement dit qui a cette dimension (c'est-à-dire le gisement par rapport à une position de référence), mais l'écart angulaire qui traduit une rotation dans un espace à trois dimensions :
Le même résultat peut s'obtenir directement en remarquant qu'en coordonnées polaires (r, α), une variation élémentaire dα entraîne un déplacement orthogonal dx=r.dα : dx étant de grandeur d'orientation géométrique par rapport à la distance r posée d'orientation 1x, l'homogénéité de la formule impose que dα est de grandeur d'orientation géométrique 1z, ce qui est donc ici la dimension du radian. La figure étant générique, c'est également la grandeur d'orientation attribuée conventionnellement aux rotations, donc à la grandeur d'écart angulaire.
Si ce raisonnement montre qu'un angle peut être porteur d'une dimension d'orientation, il n'en impose pas une en particulier, et l'assignation de telle orientation à telle grandeur physique est en réalité indifférente par rapport à une permutation circulaire des trois grandeurs d'orientation.
Grandeur d'orientation des fonctions
Fonctions trigonométriques
L'angle étant donc exprimé en unité de dimension d'orientation 1z, on voit par un développement en série que le sinus est de même de dimension 1z, tandis que le cosinus est un scalaire de dimension 10.
Ces deux dimensions sont différentes, ce dont on peut conclure, par exemple, qu'il ne peut pas y avoir de solution à une équation physique qui soit de la forme générale , où a et b seraient des scalaires, parce que cette formule ne serait alors pas homogène.

Rotations et écarts angulaires
Il faut cependant être prudent sur les cas particuliers, et noter par exemple qu'une formule comme est homogène malgré les apparences, parce qu'elle est un cas particulier de la formule donnant le sinus d'une somme de deux angles, qui dans le cas général s'écrit, en explicitant les dimensions d'orientation :


Dans le cas particulier où et , la formule se simplifie en , qui est bien homogène, parce que le terme en cos est en réalité multiplié par un sin(π/2) invisible qui lui donne la bonne orientation.



Sur le plan des équations aux dimensions, en effet, les grandeurs physiques sont définies à une constante multiplicative près, mais pas par une constante additive. Les solutions en θ sont donc des solutions en k.θ, mais ne peuvent pas se traduire immédiatement en k.θ+Cte.
Fonction complexe
Certaines grandeurs physiques sont représentées par un nombre complexe. À partir de l'équation :

on voit que le nombre imaginaire pur i doit être de dimension d'orientation 1z pour rendre la formule homogène, c'est-à-dire qu'il a la même dimension d'orientation qu'une rotation.
Ceci étant acquis, le facteur iθ est bien un scalaire d'orientation 10, et l'ensemble de la formule est alors de dimension scalaire. De plus, la fonction exponentielle n'étant ni paire ni impaire, il est bien nécessaire que son argument soit un scalaire, donc que la grandeur d'orientation de i soit la même que celle de l'angle qu'il multiplie.
Fonctions paires et impaires
Plus généralement, le développement des fonctions mathématiques en série montre facilement que :
- Une fonction impaire peut accepter un argument de dimension d'orientation en 1z, et est dans ce cas le résultat est de même dimension 1z ;
- Une fonction paire peut accepter un argument de dimension d'orientation 1z, et donne toujours un résultat de dimension scalaire en 10 ;
- Dans les autres cas, une fonction mathématique ne peut accepter que des arguments scalaires en 10 (et donne évidemment un résultat de dimension scalaire en 10).
On peut remarquer que du fait que i a pour dimension d'orientation , cette règle gouvernant l'homogénéité des formules sur le plan physique est identique à la règle correspondante sur le plan mathématique : une fonction analytique appliquée à une variable imaginaire pure sera imaginaire pure si la fonction est impaire, sera réelle si la fonction est paire, et sera mixte dans les autres cas.
Grandeur d'orientation d'une grandeur physique
Orientation d'une grandeur
L'exemple ci-dessus montre qu'il est possible d'assigner une grandeur d'orientation aux grandeurs d'un problème physique particulier. Cet exemple montre en même temps que l'assignation est nécessairement arbitraire, le même problème pouvant être résolu de la même manière modulo une permutation circulaire arbitraire des trois grandeurs d'orientation.
Il est également possible d'utiliser ces grandeurs d'orientation pour l'analyse dimensionnelle non pas d'un problème physique donné, mais d'une grandeur physique donnée. L'assignation d'une grandeur d'orientation à une grandeur physique est dans ce cas tout aussi arbitraire, mais elle est nécessairement fixe, ne dépendant pas de la géométrie « du problème » puisqu'elle ne se rattache pas à un problème particulier. Une telle assignation permet de dire, par exemple, qu'une vitesse est une grandeur physique intrinsèquement vectorielle de dimension L·T −1·1x, au lieu qu'elle soit une grandeur en L·T −1, qui « par ailleurs » est un vecteur. Le caractère vectoriel se rattache alors à la nature même de la grandeur physique, au lieu d'être une caractéristique surajoutée à sa mesure. De même, elle permet d'expliciter les « unités auxiliaire » que sont le radian et le stéradian[6] - [7], en donnant un contenu objectif et spécifique aux grandeurs physiques associées[8].
La prise en compte de la grandeur d'orientation permet de distinguer entre unités qui par ailleurs s'appuient sur les mêmes unités de base. C'est ainsi que la différence entre un couple et une énergie est intrinsèque, parce que bien qu'exprimés tous les deux en kg2⋅m2⋅s−2, un couple est un pseudovecteur en M 2·L 2·T −2·1y compte tenu de sa grandeur d'orientation, alors qu'une énergie est un scalaire en M 2·L 2·T −2·10, donc de dimensionnalité en réalité incompatible[2]. De même :
- Bien que toutes deux en s−1, une fréquence est un scalaire en T −1·10, tandis qu'une vitesse de rotation est un pseudoscalaire en T −1·1z.
- Bien que toutes deux en kg⋅s−1, une impédance mécanique est un scalaire en M·T −1·10, tandis qu'un débit massique est un flux en M·T −1·1z.
- Bien que toutes en kg⋅m2⋅s−1, l'action (physique) est un scalaire en M·L 2·T −1·10, de même que la constante de Planck ; le moment cinétique est un pseudovecteur en M·L 2·T −1·1y ; et la constante de Planck réduite est un pseudoscalaire en M·L 2·T −1·1z.
Conventions d'assignation
- Orientations en 1x (vecteurs vrais)
Par rapport aux unités de base du Système international, la seule grandeur qui ait un caractère intrinsèquement vectoriel est la longueur, sous la forme d'un déplacement. Par convention, le choix étant arbitraire, elle se verra attribuer comme ci-dessus une grandeur d'orientation en 1x, celle de « la ligne d'écriture » : tant qu'il n'y a pas de différence d'orientation, tous les vecteurs considérés sont alignés dans un sens ou dans l'autre le long de cette ligne. Ainsi, un déplacement géométrique est essentiellement effectué « dans la direction de référence », et sa dimension est, par convention, en 1x.
Les grandeurs d'orientation des grandeurs physiques dérivées peuvent ensuite en être déduite, de la même manière que leur dimension: de proche en proche, à travers les relations qui les lient. D'une manière générale, on pourra constater que les grandeurs physiques qui se traduisent par des vecteurs vrais peuvent toujours recevoir une orientation en 1x, sans que cela puisse introduire d'incohérence : l'orientation 1x est celle des vecteurs vrais.
- Orientations en 1y (pseudovecteurs)
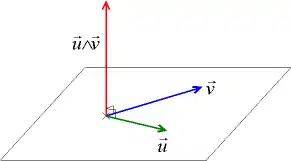



La surface d'un parallélogramme déterminé par deux déplacements et est donnée par le produit vectoriel de ces deux vecteurs :



Sur le plan de l'équation aux dimensions, le produit des deux dimensions propres des deux déplacements, en L·1x, donne une dimension scalaire en L 2·10 au lieu du pseudovecteur attendu. C'est donc l'opérateur « produit vectoriel » qui introduit par lui-même le caractère pseudovectoriel[2] propre de la surface, ce qui conduit à assigner à cet opérateur une dimension notée 1y. Cette attribution permet en particulier de retrouver la même dimension en 1y pour l'élément de surface.
D'une manière générale, on pourra constater de même, de proche en proche, que la dimension d'orientation en 1y est caractéristique des pseudovecteurs. L'assignation d'une grandeur d'orientation à un opérateur qu'est le produit vectoriel n'est pas inhabituel en physique, et elle permet bien de retrouver correctement les règles usuelles de composition entre vecteurs et pseudovecteurs : compte tenu des règles sur l'algèbre des grandeurs d'orientation, rappelées ci-dessus, le produit vectoriel de deux vecteurs vrais est en 1x.1y.1x = 1y, donc un pseudovecteur; le produit de deux pseudovecteurs est en 1y.1y.1y = 1y, donc également un pseudovecteur ; tandis que le cas mixte est en 1x.1y.1y = 1x, donc un vecteur vrai.
- Orientations en 1z (flux et angles)
La troisième grandeur d'orientation doit donc être le produit des deux précédentes, non pas sous forme vectorielle (qui introduirait encore une dimension en 1y), mais sous forme de produit scalaire. C'est par exemple cette combinaison que l'on retrouve dans toutes les intégrales de flux, sous la forme élémentaire :

Si est une vitesse en L·T −1·1x, son produit par une surface élémentaire en L 2·1y sera exprimé par un débit, dont la dimension sera donc en L 3·T −1·1z.
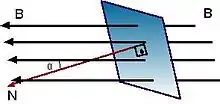
Cette grandeur d'orientation est également celle des angles, ce que l'on peut retrouver dans la formule donnant le produit vectoriel, noté cette fois-ci sous forme d'un scalaire multipliant le vecteur normal à la surface :

La surface étant un pseudovecteur en 1y, et le vecteur normal un vecteur vrai 1x, le qui apparaît dans la formule numérique donnant la valeur de cette surface doit être en 1z, et donc d'une manière générale c'est comme ci-dessus la dimension de l'angle θ que font les deux vecteurs.

D'une manière générale, la dimension d'orientation en 1z est effectivement celle des grandeurs de flux, des angles, ou des angles solides — qui sont visuellement plus parlants. Quelques remarques peuvent être faites sur la construction de cette troisième grandeur d'orientation, celle des pseudoscalaires :
- Si le flux macroscopique à travers une surface définie se comporte effectivement comme une grandeur scalaire, le flux élémentaires est néanmoins une grandeur essentiellement orientée, dans la mesure où sa valeur dépend de l'angle entre la surface et le vecteur, et qu'elle est maximale quand ces deux (pseudo)vecteurs sont alignés. Le flux n'est défini que par rapport à l'orientation d'une surface de référence ; et fondamentalement, « le flux en un point » abstraction faite de la surface ne peut être qu'une grandeur orientée.
- Le flux est maximum lorsque et sont de même « direction », alors même que l'un est en 1x et l'autre en 1y : ceci montre bien la différence qu'il faut faire entre l'orientation d'un vecteur ou d'un pseudovecteur particulier dans un problème physique, et la grandeur d'orientation de l'unité associée : ce n'est pas parce qu'une grandeur est intrinsèquement cataloguée comme en 1x qu'elle sera orienté dans la direction des x dans tel ou tel problème physique concret.
- Sur le plan géométrique, le concept important pour les rotations est celui de la rotation, et celui du plan sur lequel se déroule le phénomène physique considéré. En soi, une rotation suivant l'axe des x ne change rien à cet axe, les effets d'une rotation s'observent en géométrie plane dans l'axe xy, et l'axe de rotation correspondant, en trois dimensions, est alors celui de l'axe des z.

Orientation de quelques unités
L'affectation des quatre éléments du groupe de Klein aux dimensions des grandeurs physiques est conventionnelle, et reflète surtout la différence entre les vecteurs et les pseudovecteurs. La différence entre les deux se manifeste lorsqu'on transforme une situation physique par une symétrie centrale (ou ce qui revient au même, par une symétrie dans un miroir) : un vecteur est changé en son opposé, tandis qu'un pseudovecteur reste invariant. De même, dans une telle transformation, les scalaires restent inchangés, tandis que les grandeurs de flux changent de signe. Les grandeurs physiques se répartissent alors en quatre classes, dont les règles de composition par rapport au produit scalaire sont celles du groupe de Klein, et celles concernant le produit vectoriel s'en déduisent en attribuant à cet opérateur une grandeur en 1z.
Le caractère variant de certaines grandeurs par rapport à une symétrie centrale est souvent occulté par la convention d'orientation qui veut que les volumes des corps physiques, par exemple, soient toujours comptés positivement, ce qui revient à multiplier la grandeur considérée par une constante unité en 1y : c'est le cas des volumes, des pressions, des surfaces orientées « vers l'extérieur », etc.
| 10 Scalaire | 1x Vecteur | 1y Pseudovecteur | 1z Pseudoscalaire |
|---|---|---|---|
| Angle plan : 1z | |||
| Masse inerte : M·10 | Déplacement : L·1x | Surface : L 2·1y | Volume : L 3·1z |
| Fréquence : T −1·10 | Vitesse : L·T −1·1x | Vitesse de rotation : T −1·1z | |
| Énergie : M·L 2·T −2·10 | Force : M·L·T −2·1x | Couple : M·L 2·T −2·1y | Pression : M·L −1·T −2·1z |
| Moment d'inertie : M·L 2·10 | Quantité de mouvement : M·L·T −1·1x | Moment cinétique : M·L 2·T −1·1y | Angle solide : 1z |
| Charge électrique : T·I·10 | Champ électrique : M·L·T −3·I −1·1x | Champ magnétique : M·T −2·I −1·1y | Débit : L 3·T −1·1z |
| Courant électrique : I·10 | Densité de courant : L −2·I·1y | Densité de charge : L −3·T·I·1z |
S'il est relativement simple de distinguer entre vecteurs en 1x et pseudovecteurs en 1y, la distinction entre scalaires et grandeurs en 1z n'est pas évidente et est parfois contrintuitive. Ainsi, s'il peut paraître logique d'assigner à un débit une grandeur de flux en 1y, la même assignation pour le volume paraît étrange. Elle est pourtant logique, que ce soit parce qu'une grandeur est nécessairement du même type que sa vitesse d'évolution, ou parce qu'un volume est effectivement le produit d'une surface (pseudovecteur) par une hauteur (vecteur).
- Effet de la convention d'orientation
Le volume, par lui-même, est bien une grandeur en 1z, qui donc change de signe lorsqu'on fait subir au repère une symétrie centrale. Cependant, dans la mesure où il n'existe pas de corps physique ayant un volume négatif, le volume d'un système physique réel est toujours compté positivement, ce qui revient à le multiplier par la convention d'orientation en 1z. Le volume d'un corps physique est alors un scalaire, à cause de la convention d'orientation.
De même, un élément de surface est normalement un pseudovecteur en 1y, mais la convention d'orientation qui veut que son orientation sur une surface fermée soit dirigée vers l'extérieur revient à le multiplier par la convention d'orientation en 1z, ce qui en fait alors un vecteur en 1x.
L'utilisation de cette convention d'orientation peut être problématique dans l'analyse dimensionnelle, parce qu'elle correspond à une grandeur par ailleurs généralement invisible dans les données du problème.
Grandeur d'orientation en équation aux dimensions
Exemple
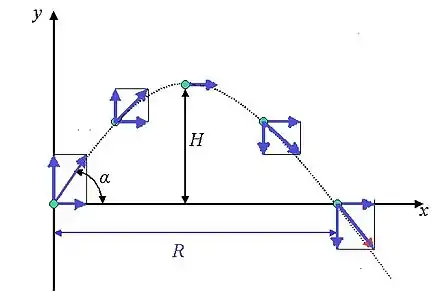
En exemple d'application, Siano prend[5] le problème de la portée d'un projectile. Par rapport à la direction du point d'impact, l'angle de tir α impose une rotation de cette direction dans un plan perpendiculaire, et peut être notée ; et la gravité est un vecteur dans ce même plan vertical mais tourné par rapport à , donc d'orientation . Avec ces conventions d'orientation, la portée P est alors de la forme :
- , ce qui implique que :


L'homogénéité dimensionnelle impose alors correctement que a = −1 et b = 2 ; et par rapport à la grandeur d'orientation, c doit alors être un entier impair (donc, peut être pris égal à l'unité).
Une analyse complémentaire montre que la fonction recherchée en α, nécessairement impaire pour des raisons d'homogénéité, est périodique de période 2π (donc de la forme ) et s'annule pour α=0 et α=π/2 : donc n=2 et la fonction recherchée est . On a donc :



Détermination des fonctions angulaires
Dans une équation aux dimensions, la prise en compte d'une grandeur d'orientation permet donc de gagner une information complémentaire par rapport à une dimension angulaire, là où l'approche classique élimine complètement ce paramètre, mais cette information reste très fragmentaire. La seule information réellement obtenue est du type « pair / impair », c'est-à-dire de savoir si une telle fonction existe ou non. En outre, trois points doivent être gardés en mémoire dans la recherche de la solution par des moyens complémentaires :
- Lorsqu'une équation aux dimensions impliquant un angle montre que cette dimension peut être imputée à une fonction trigonométrique, la solution peut donc être au premier ordre de la forme si la dimension est en ou en si la dimension est en , mais dans tous les cas, l'angle est bien nécessairement l'écart angulaire par rapport à zéro, et non par rapport « à une constante arbitraire près » (une constante additive angulaire imposerait un décalage angulaire à la direction et modifierait par conséquent son orientation dans l'équation).


- La fonction trigonométrique impliquée, de la forme n'est déterminée qu'à une constante multiplicative près. Une analyse complémentaire rapide d'une solution en permet souvent de cerner la valeur du coefficient de proportionnalité arbitraire (mais souvent petite) k : la solution est souvent périodique en 2π, ce qui implique que k est entier ; et des zéros de la fonction sont souvent facilement identifiables, ce qui permet de cerner les valeurs possibles pour k.
- Si l'analyse dimensionnelle montre que le facteur doit être de dimension d'orientation en , la fonction recherchée est dans le cas général de type , où f est une fonction impaire. Une solution en ainsi identifiée n'est donc valable qu'au premier ordre, la formule réelle pouvant comprendre de plus les harmoniques de cette fonction de base. C'est typiquement le cas, par exemple, pour la période d'oscillation du pendule pesant.

Orientation d'un problème physique
L'exemple ci-dessus montre également que l'assignation d'une grandeur d'orientation à une variable particulière dépend au cas par cas de la géométrie du problème, puisque le vecteur déterminant le point d'impact étant noté en 1x, le champ gravitationnel est noté en 1y parce qu'il est orthogonal au premier.
Les interactions entre grandeurs orientées correspondront à des produits scalaires ou des produits vectoriels, il est toujours possible, pour résoudre l'équation aux dimensions d'un problème physique particulier, de considérer que le problème ne se joue qu'en trois directions perpendiculaires deux à deux : les composantes autres que parallèle ou orthogonales auront de toute manière une contribution nulle à la solution.
Il convient de souligner que la grandeur d'orientation, tout en suivant toujours l'algèbre du groupe de Klein, correspond à deux cas d'utilisations distincts suivant que l'on s'adresse à l'équation aux dimensions d'un problème physique donné, ou à celle d'une grandeur physique particulière. S'il faut tenir compte à la fois des grandeurs d'orientations correspondant aux directions vectorielles, et celles correspondant aux grandeurs physiques impliquées, les deux sont incommensurables, et il importe de ne pas les confondre. Dans ce cas le problème peut effectivement être traité suivant les deux aspects, parce que l'équation physique doit être homogène à la fois suivant les grandeurs d'orientation des grandeurs physiques, et suivant l'orientation géométrique que prend tel ou tel vecteur ou pseudovecteur dans le problème particulier. La notation peut facilement refléter cette contrainte, en notant par exemple 1zx un pseudovecteur (en z) qui serait aligné suivant l'axe des x dans le problème particulier.
Notes et références
Références
- Encyclopaedia Britannica, Ninth Edition. VII, 241
- Physical Entities and Mathematical Representation. Chester H. Page, Journal of research of the National Bureau of Standards-B. Mathematics and Mathematical Physics. Vol 65B, No.4, October-December 1961.
- Huntley, H. E. (1967), Dimensional Analysis, Dover, LOC 67-17978
- Donald Siano, Orientational Analysis – A Supplement to Dimensional Analysis – I, vol. 320, , 267–283 p. (DOI 10.1016/0016-0032(85)90031-6)
- Donald Siano, Orientational Analysis, Tensor Analysis and The Group Properties of the SI Supplementary Units – II, vol. 320, , 285–302 p. (DOI 10.1016/0016-0032(85)90032-8)
- Depuis la 20e conférence générale du Bureau international des poids et mesures, le radian a perdu son statut singulier d'« unité auxiliaire » et est à présent considéré comme une unité dérivée, « unité sans dimension dont le nom et le symbole peut être utilisé, mais pas nécessairement, dans les expressions d'autres unités dérivées SI, suivant les besoins ». Son emploi est donc toujours facultatif en ce qui concerne l'expression des unités du Système international d'unités.
- « Résolution 8 de la 20e CGPM – Suppression de la classe des unités supplémentaires dans le SI », sur bipm.org, Bureau international des poids et mesures, .
- Checking SCADE models for correct usage of physical units, Schlick R., Herzner W., Le Sergent. In Computer Safety, Reliability, and Security: 25th International Conference, SAFECOMP 2006, Gdansk, Poland, September 27-29, 2006, Proceedings. Springer, 28 septembre 2006.
Liens internes
Liens externes
- Orientational analysis, tensor analysis and the group properties of the SI supplementary units—II, Donald B. Siano,
- Dimensional Analysis of Matrices, State-Space Models and Dimensionless Units. Harish J. Palanthandalam-madapusi ; Dennis S. Bernstein ; Ravinder Venugopal, IEEE Control Systems Magazine, .
- What Are the Physical Dimensions of the A Matrix? Harish J. Palanthandalam-Madapusi, Dennis S. Bernstein and Ravinder Venugopal, Proceedings of the 2007 American Control Conference.
- Revisiting the rocking block: closed-form solutions and similarity laws. Elias G. Dimitrakopoulos and Matthew J. DeJong, Proc. R. Soc. A. 2012 468 , 2294-2318.
- Can Angles be Assigned a Dimension? Derek Bolton, November 12, 2016.
- Dimensionless Units in the SI, Peter J. Mohr & William D. Phillips, arXiv:1409.2794v1 [physics.data-an] .