Force centripète
Le terme force centripète (« qui tend à rapprocher du centre », en latin) désigne une force permettant de maintenir un objet dans une trajectoire incurvée, généralement une conique (cercle, ellipse, parabole, hyperbole). En effet, tout objet décrivant une trajectoire de ce type possède en coordonnées cylindriques une accélération radiale non nulle, appelée accélération centripète, qui est dirigée vers le centre de courbure. D'un point de vue dynamique, le principe fondamental de la dynamique (PFD) indique alors la présence d'une force radiale dirigée elle aussi vers le centre de courbure.
Cette force est au sens de Newton une force réelle, qui pourra avoir diverses origines, par exemple :
- force de gravitation (mouvement des planètes) ;
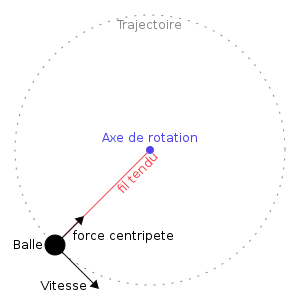
- force de tension (mouvement circulaire d'une masse accrochée à un fil tendu dont l'autre extrémité est généralement fixe ou presque).
Sans force centripète, l'objet ne peut pas tourner ou cesse de tourner. Dans l'illustration ci-contre, si le fil casse, la balle cesse de tourner et poursuit par simple inertie un mouvement rectiligne, tangent à son ancienne trajectoire circulaire. Ce point de vue est celui d'un observateur situé en dehors du dispositif tournant (comme le lecteur qui regarde le schéma — ce repère est galiléen). Pour un observateur situé au centre de rotation et tournant avec lui (le repère est alors non galiléen) l'éjection de la balle est perçue différemment, comme l'effet d'une force dite force centrifuge (la force centrifuge est dite fictive car elle n'intervient que dans le repère en rotation, pour interpréter un effet subjectif).
Dans un référentiel galiléen un corps isolé possède, s'il est en mouvement, un mouvement rectiligne uniforme (uniforme: vitesse constante). Lui faire parcourir une trajectoire elliptique revient à le dévier constamment, et donc à lui appliquer à tout instant une force dirigée vers le centre de courbure. Cette force est alors qualifiée de centripète. Le caractère centripète d'une force n'est pas intrinsèque, mais lui est conféré par son effet sur la trajectoire de l'objet. Il serait plus correct de parler de force à effet centripète.
Par construction, la force centripète est radiale, dirigée vers le centre de courbure, et son intensité est inversement proportionnelle au rayon de courbure de la trajectoire du point d'application.
Formule de base
Le vecteur vitesse est défini par la vitesse et la direction du mouvement. Si la résultante (c'est-à-dire la somme des vecteurs) des forces appliquées à un objet est nulle, cet objet n'accélère pas et donc se déplace sur une ligne droite à vitesse constante : le vecteur vitesse est constant. Par contre, un objet qui se déplace à vitesse constante et dont la trajectoire est un cercle change en permanence de direction de mouvement. Le taux de variation du vecteur vitesse est alors appelé accélération centripète.
Cette accélération centripète dépend du rayon r du cercle et de la vitesse v de l'objet. Plus la vitesse est grande, plus l'accélération augmente, de même plus le rayon est petit, plus elle augmente. De manière plus précise, l'accélération centripète est donnée par la formule


où ω = v / r est la vitesse angulaire. Le signe négatif indique que la direction de cette accélération est dirigée vers le centre du cercle, c'est-à-dire opposée au vecteur position . (On suppose que l'origine de est placée au centre du cercle.) désigne le vecteur unitaire dans la direction de .


D'après la Seconde loi de Newton, , la force physique doit être appliquée à une masse m pour produire une telle accélération. La quantité de force nécessaire pour se déplacer à la vitesse v sur le cercle de rayon r est:



l'expression ayant été formulée de différentes manières équivalentes. Ici, est le vecteur de vitesse angulaire. Ici encore, le signe négatif indique que la direction est dirigée vers l'intérieur vers le centre du cercle et dans la direction opposée au vecteur rayon . Si la force appliquée est moins forte - respectivement plus forte - que , l'objet va glisser vers l'extérieur - respectivement l'intérieur -, se déplaçant sur un cercle plus grand, - resp. plus petit.


Si un objet se déplace sur un cercle à une vitesse variable, son accélération peut être divisée en deux composantes : l'accélération radiale (l'accélération centripète) qui change la direction de la vitesse, et une composante tangentielle qui change l'amplitude de la vitesse.
Exemples
Pour un satellite en orbite autour d'une planète, la force centripète est fournie par l'attraction gravitationnelle entre le satellite et la planète et elle agit en direction du barycentre des deux objets.
Pour un objet accroché au bout d'une corde et tournant autour d'un axe de rotation vertical, la force centripète est la composante horizontale de la tension de la corde qui agit en direction du barycentre entre l'axe de rotation et l'objet.
Pour un objet en mouvement circulaire uniforme, cette force vaut ,

étant la masse, la vitesse et , le rayon du cercle.



Exemple numérique
Exemple : une balle de 1 kg va à 2 m/s à une distance de 0,5 m du poteau central, donc une force de 8 newtons (0,8 kgf)

où la conversion en kilogramme-force s'exprime comme suit : .

Confusions usuelles
La force centripète ne doit pas être confondue avec la force centrifuge. Cette dernière est une force fictive dite d'inertie qui intervient si on se place dans un référentiel en rotation, pour interpréter l'éloignement d'un corps qui échappe à cette rotation. Pour pouvoir utiliser les lois de Newton il convient de se placer dans un référentiel non-accéléré, dit référentiel galiléen. Dans un tel référentiel les forces d'inerties disparaissent tout simplement au profit des seules forces réelles (non fictives).
En référentiel galiléen nous sommes dans l'inertiel, en non galiléen en centrifuge, il y a donc encore confusion.
La force centripète ne doit pas non plus être confondue avec la force centrale. Les forces centrales sont une classe de forces physiques entre deux objets qui suivent deux conditions :
- la magnitude ne dépend que de la distance entre les deux objets
- la direction pointe le long de la ligne reliant les centres de ces deux objets.
Par exemple, la force gravitationnelle entre deux masses ou la force électrostatique entre deux charges électriques sont des forces centrales. La force centripète maintenant un objet en mouvement circulaire est souvent une force centrale, mais ce n'est pas la seule.
La force centrifuge n'est pas la réaction de la force centripète. La réaction de la force centripète existe bien mais partira par exemple de la terre vers la lune dans le cas du couple Terre-Lune.
Dérivation géométrique
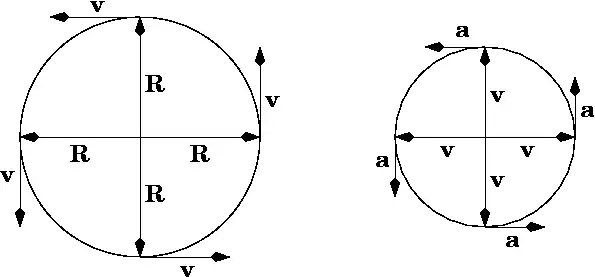
Le cercle de gauche montre un objet se déplaçant sur un cercle à vitesse constante à quatre instants différents sur l'orbite. Son vecteur position est et son vecteur vitesse .


Le vecteur vitesse est toujours perpendiculaire au vecteur position (car est toujours tangent au cercle) ; ainsi, comme se déplace en cercle, fait de même. Le mouvement circulaire de la vitesse est indiqué sur le dessin de droite, avec le mouvement de l'accélération . La vitesse est le taux de variation de la position, l'accélération est le taux de variation de la vitesse.

Comme les vecteurs position et vitesse se déplacent conjointement, ils tournent autour de leurs cercles respectifs au même instant T. Ce temps est la distance parcourue divisée par la vitesse :

et par analogie,

En égalant ces deux équations et en résolvant pour , on obtient:


la comparaison des deux cercles indique que l'accélération pointe vers le centre du cercle R. Par exemple, à un instant donné, le vecteur position pointe vers 12 heures, le vecteur vitesse pointe vers 9 heures qui (en regardant sur le cercle de droite) a un vecteur d'accélération pointant vers 6 heures. Ainsi le vecteur accélération est opposé au vecteur position et pointe en direction du centre du cercle.
Dérivation par l'analyse
Une autre stratégie de dérivation est d'utiliser un système de coordonnées polaires, en supposant que le rayon reste constant, et de dériver deux fois.
Soit le vecteur décrivant la position d'une masse à un instant t. Comme on suppose que le mouvement est circulaire uniforme, on a où r est constant (rayon du cercle) et est le vecteur unitaire pointant depuis l'origine vers la masse. La direction est décrite par θ, angle entre l'axe des abscisses (x) et le vecteur unitaire, mesuré dans le sens trigonométrique (sens contraire des aiguilles d'une montre). Exprimé dans le système des coordonnées cartésiennes en utilisant les vecteurs unitaires (axe des abscisses, x) et (axe des ordonnées, y), on a






Note: Contrairement aux vecteurs unités cartésiens, qui sont constants, la direction du vecteur unité en coordonnées polaires dépend de l'angle θ, et donc ses dérivées dépendent du temps.
En dérivant pour obtenir le vecteur vitesse :



où ω est la vitesse angulaire dθ/dt, et est le vecteur unitaire qui est perpendiculaire à et qui pointe dans la direction des θ augmentant. En coordonnées cartésiennes, on a .


Ce résultat indique que le vecteur vitesse est dirigé autour du cercle et en re-dérivant on obtient l'accélération

Et ainsi, la composante radiale de l'accélération est :
- aR = −ω2r
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Centripetal force » (voir la liste des auteurs).