Chang'e 3
Chang'e 3 (en chinois : 嫦娥三号 ; pinyin : ) est la troisième mission du programme Chang'e développé dans les années 2000 par l’administration spatiale nationale chinoise (CNSA) et qui vise l'exploration de la Lune par des engins automatiques.
Sonde spatiale

| Organisation | CNSA (Chine) |
|---|---|
| Programme | Chang'e |
| Domaine | Étude du sol lunaire, astronomie ultraviolet |
| Type de mission | atterrisseur + astromobile |
| Statut | Sur le sol lunaire |
| Lancement | (UTC) |
| Lanceur | Longue Marche 3B |
| Durée de vie |
atterrisseur : prévue 1 an ; actuellement 2047 jours (~5 ans et demi) rover : prévue 3 mois ; finale 959 jours (immobile depuis le 25 janvier 2014, 42 jours après l'atterrissage) |
| Identifiant COSPAR | 2013-070A |
| Protection planétaire | Catégorie II (présumé)[1] |
| Masse au lancement | 3 700 kg (rover 140 kg) |
|---|
| Atterrissage | (UTC) |
|---|
Le , Chang'e 3 a déposé un astromobile (rover) baptisé Yutu (lapin de jade) au nord-ouest de la Mer des Pluies. L'événement réunissait plusieurs premières dans le programme spatial chinois : atterrissage en douceur sur un autre corps céleste, premier robot mobile et mise en œuvre d'un générateur thermoélectrique à radioisotope. L'atterrisseur comme le rover emportaient plusieurs instruments scientifiques pour analyser le sol lunaire, notamment un télescope fonctionnant dans l'ultraviolet. La mission était prévue durer trois mois pour le rover, un an pour l'atterrisseur. Mais, un peu plus d'un mois après l'atterrissage, Yutu a cessé d'émettre pour des raisons inexpliquées ou non révélées par l'agence spatiale chinoise, après avoir parcouru une distance de 114 mètres.
Contexte
Chang'e 3 est la troisième sonde spatiale lancée par la Chine dans le cadre de son programme d'exploration lunaire. Contrairement aux deux précédentes sondes, Chang'e 1 (2007) et Chang'e 2 (2010), qui avaient été placées en orbite lunaire, Chang'e 3 emporte un rover (astromobile) en vue d'y atterrir. Les spécifications de l'engin ont été fixées en . Deux ans plus tard, une simulation de la phase d'atterrissage, la partie la plus délicate de la mission, a été exécutée avec succès par un prototype. Et en , la construction de l'engin a débuté[2]. Chang'e 3 a été le premier engin à se poser sur la Lune depuis l'atterrissage de la sonde soviétique Luna 24, qui avait rapporté un échantillon de sol en 1976[3].
Caractéristiques techniques
La sonde spatiale Chang'e 3 a une masse totale comprise entre 3,7 et 3,8 tonnes, ce qui correspond à la capacité de lancement de la fusée chinoise Longue Marche 3B. Elle comprend un atterrisseur chargé d'amener l'ensemble jusqu'au sol lunaire et un astromobile (rover).
L’atterrisseur
L'atterrisseur dispose de plusieurs types de moteurs qui reposent sans doute sur des moteurs-fusées à ergols liquides, brûlant un mélange d'UDMH et de peroxyde d'azote. Le moteur-fusée principal est sans doute le moteur à poussée modulable disposant d'un système de régulation à aiguille, déjà expérimenté dans l'espace dans le cadre d'autres missions chinoises. Sa poussée peut être établie à une valeur comprise entre 1 500 et 7 500 newtons (N), ce qui constitue une amplitude suffisante pour permettre un atterrissage en douceur, sur un satellite dont la gravité est égale à un sixième de celle de la Terre. La poussée peut être fixée avec une précision de 7,5 newtons et le moteur dispose d'un système de refroidissement actif. Les ergols sont mis sous pression par un gaz inerte. Vingt-huit petits propulseurs sont par ailleurs utilisés pour les petites corrections de trajectoire et pour les modifications d'orientation. Huit modules de propulsion, composés chacun de deux propulseurs de 150 N et d'un propulseur de 10 N, sont installés sur des panneaux de petite taille recouvrant l'atterrisseur, et permettent de stabiliser celui-ci sur trois axes. Quatre autres propulseurs de 10 N sont fixés de manière isolée.
Pour l'atterrissage, la sonde spatiale utilise plusieurs instruments : un système inertiel sert, au début de cette phase, à déterminer la trajectoire ; puis, à l'approche du sol, un altimètre laser et un capteur à micro-ondes interviennent pour déterminer la vitesse et la distance restante. Quand la sonde arrive à cent mètres de la surface lunaire, l'ordinateur de bord utilise les images fournies par une caméra de descente et par un système de reconnaissance de forme, pour trouver un terrain d'atterrissage dépourvu d'obstacles. Le train d'atterrissage comprend quatre pieds faisant un angle de 30° avec la partie centrale de l'atterrisseur, renforcés par deux poutrelles attachées à cette partie centrale, et sont munis d'absorbeurs de choc pour résister à l'impact. Les pieds sont munis de larges semelles pour éviter de s'enfoncer de manière trop importante dans le sol. La masse de l'atterrisseur, une fois parvenu sur le sol lunaire, est de 1 200 kg. L'énergie électrique lui est fournie par des panneaux solaires et par un générateur thermoélectrique à radioisotope. Celui-ci est utilisé durant la nuit lunaire (d'une durée de quinze jours terrestres), pour alimenter les résistances chauffantes qui permettent de maintenir une température minimale. Le rover est solidement fixé sur l'atterrisseur. Une fois celui-ci posé, deux rampes sont déployées pour permettre au rover de descendre sur le sol lunaire[2] - [4].
Instruments scientifiques
L'atterrisseur emporte plusieurs instruments qui seront mis en œuvre après l'arrivée sur le sol lunaire :
- un télescope ultraviolet LUT (Lunar-Based Ultraviolet Telescope) qui doit permettre d'étudier les galaxies, les étoiles binaires, les noyaux galactiques actifs et les étoiles les plus brillantes. L'observation depuis la Lune présente plusieurs avantages par rapport à l'observation depuis la Terre, bien que le télescope emporté par l'équipage d'Apollo 16 (37 ans auparavant) n'ait fourni que des images médiocres selon les standards actuels. L'instrument LUT est un télescope de type Ritchey-Chrétien, avec une ouverture de 150 mm qui permet d'observer les longueurs d'onde 245–340 nm et de détecter les étoiles jusqu'à une magnitude apparente de 13[4] ;
- une caméra observant, dans l'extrême ultraviolet, la plasmasphère de la Terre (une région de la magnétosphère terrestre située au-dessus de l'ionosphère), qui présente des irrégularités non expliquées. La caméra a un angle de vue de 16° et une résolution angulaire de 0,1° avec une résolution temporelle de dix minutes. Elle mesure le rayonnement à 30,4 nanomètres, caractéristique de l'ion He+ qui abonde dans la plasmasphère[4] ;
- plusieurs caméras fonctionnant en lumière visible. Trois caméras panoramiques, dirigées dans différentes axes, doivent prendre des images du site d'atterrissage, avant le début de l'excursion lunaire du rover. Par ailleurs, une caméra de descente avec une définition de 1 280 × 1 280 pixels est pointée vers le sol et permet, durant la descente, d'obtenir des images du terrain sur lequel l'atterrisseur se dirige, afin d'aider les responsables de mission à tracer la trajectoire future du rover[4] ;
- plusieurs caméras destinées à filmer le déploiement des parties mobiles et la mise à feu des moteurs. Il se pourrait que l'atterrisseur emporte également une sonde destinée à étudier le sol lunaire.
Le rover
Le rover lunaire Yutu (chinois : 玉兔 ; pinyin : ; litt. « Le lapin de jade », en référence au lapin lunaire), est un engin autonome à six roues, d'une masse de 140 kg dont 20 kg de charge utile. Haut de 1,5 mètre, il comporte un mât servant de support aux caméras de navigation et panoramique ainsi qu'à l'antenne parabolique utilisée pour les communications avec la Terre. Un bras articulé est utilisé comme support pour un des instruments scientifiques. Il a une durée de vie prévue de 90 jours (trois jours et trois nuits lunaires). Son énergie est fournie par des panneaux solaires. Le rover se met en mode veille durant la nuit lunaire (longue de quinze jours terrestres) lorsque la température tombe à 180 °C au-dessous de zéro et survit grâce à l'énergie stockée dans ses batteries, sans doute complétées, comme ses homologues américains et russes, par des unités de chauffage à base d'isotopes radioactifs de plutonium 238. Le système de locomotion utilise un châssis similaire à celui des rovers américains, pour faciliter le franchissement des obstacles. Chaque roue est motorisée avec un moteur électrique sans balais alimenté en courant continu. Le rover est conçu pour parcourir une distance maximale de 10 km et peut explorer une surface de 3 km2. Il peut monter une pente de 20° et franchir un obstacle de 20 cm de haut. Il utilise un algorithme de Delaunay pour analyser les images fournies par ses caméras de navigation et celles destinées à éviter les obstacles, afin d'en déduire la route à suivre. Compte tenu du temps d'aller-retour d'un signal radio (2,5 secondes), il est prévu qu'il puisse être également télécommandé par un opérateur humain[4].
Instruments scientifiques
Le rover emporte plusieurs instruments :
- un radar GPR (Ground Penetrating Radar), installé sous le rover, permet de sonder les couches superficielles jusqu'à une profondeur de trente mètres et de déterminer la structure de la croute lunaire jusqu'à une profondeur de cent mètres. Pour remplir ses deux objectifs, il utilise deux fréquences, 450 MHz et 60 MHz, avec une résolution respectivement de 2-2,5 mètres et de 20-25 cm. Les mesures effectuées doivent permettre de valider les modèles relatifs à l'épaisseur de la couche de régolite et aux structures profondes établis précédemment à l'aide des radars embarqués à bord d'orbiteurs lunaires[4] ;
- un spectromètre rayons X à particules alphas est installé au bout d'un bras articulé. Il utilise une source radioactive de 30 millicuries pour déterminer l'abondance des principaux éléments chimiques présents dans le sol. L'objectif est de déterminer la géologie des terrains traversés et d'en déduire les processus de création de ceux-ci[4] ;
- un spectromètre imageur en lumière visible et proche infrarouge, qui mesure la distribution des minéraux lunaires. Le spectre lumineux couvert va de 450 à 2400 nanomètres ce qui lui permet de déterminer la composition avec une précision de 10 %. Il utilise un filtre à modulateur acousto-optique qui ne comporte aucune pièce mobile. L'instrument a un champ optique de 6° × 6° en lumière visible, et de 3° × 3° en proche infrarouge. Sa résolution spectrale est de 8 nanomètres dans la bande des 450–950 nm et de 12 nm dans la bande des 900–2 400 nm[4] ;
- deux caméras panoramiques sont installées en haut du mât du rover. La distance entre elles a été déterminée de manière à fournir des images en relief à haute résolution. Ces images doivent permettre de déterminer la morphologie et la topographie de la surface de la Lune autour du rover. Ces caméras sont également utilisées pour modéliser le terrain environnant, afin d'identifier les trajectoires sans obstacles et des cibles scientifiques potentielles[4] ;
- des caméras sont également dédiées aux fonctions de navigation. Deux d'entre elles sont installées en haut du mât et deux autres, destinées à éviter les obstacles, sont fixées sur l'avant de l'astromobile[4].
Déroulement de la mission

Du lancement à l'atterrissage
Chang'e 3 a été lancé le à 17 h 30 UTC par une fusée Longue Marche 3B depuis la base de Xichang[5]. La sonde s'est insérée le sur une orbite lunaire de 100 × 100 km puis son orbite a été abaissée le à 100 × 15 km en préparation de l'atterrissage[6]. Lorsqu'elle a atteint son altitude la plus basse, le moteur de l'atterrisseur a annulé sa vitesse et l'a placé à 100 mètres au-dessus du sol. Il s'est maintenu à cette altitude le temps d'identifier une zone dépourvue d'obstacles, puis est descendu à 4 mètres. Son moteur a alors été coupé et il est tombé en chute libre, se posant à une vitesse inférieure à 15 km/h le à 13h11 (UTC). Ce moment correspondait au début d'une journée lunaire, qui dure quatorze jours, ce qui garantit la fourniture d'énergie solaire et une température relativement clémente.
Peu après, l'atterrisseur a déployé ses panneaux solaires et son antenne parabolique directionnelle puis a été soumis à différentes vérifications. Fixé à son sommet, le rover a libéré ses propres panneaux et dressé le mât supportant ses caméras panoramiques et son antenne parabolique. Des systèmes pyrotechniques ont rompu les fixations qui le reliaient à l'atterrisseur. Après que l'on a vérifié que l'inclinaison de celui-ci était inférieure aux 15° acceptables et que le terrain ne présentait pas d'obstacle, la rampe a été déployée, le rover s'y est engagé à 18 h 48 UTC puis elle l'a descendu jusqu'au sol. Après une ultime vérification, le rover a effectué ses premiers tours de roue à 20 h 40[6].
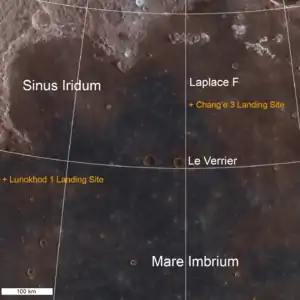 Localisation du point d'atterrissage de Chang'e 3 par rapport à celui de Lunokhod 1.
Localisation du point d'atterrissage de Chang'e 3 par rapport à celui de Lunokhod 1.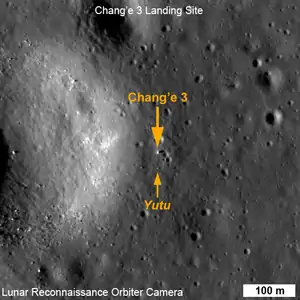 Photographie prise par la sonde Lunar Reconnaissance Orbiter montrant l'atterrisseur Chang'e 3 (grosse flèche) et son rover (petite flèche).
Photographie prise par la sonde Lunar Reconnaissance Orbiter montrant l'atterrisseur Chang'e 3 (grosse flèche) et son rover (petite flèche).
Les déplacements au sol
Les données topographiques enregistrées par les orbiteurs Chang'e 1 et 2 ont été utilisées pour choisir le site d'atterrissage de Chang'e 3. Le site retenu est Sinus Iridum, une plaine de lave basaltique qui forme une extension au nord-ouest de Mare Imbrium (la mer des pluies), par 44° Nord. Le rover a été conçu pour explorer une zone de 3 × 3 km pendant trois mois. Il est prévu que les instruments de l'atterrisseur, le télescope ultraviolet et la caméra fonctionnant dans l'ultraviolet, recueillent des données durant au moins un an[2] - [7] - [6].
Premier "jour lunaire" Le à 21h40, sept heures après l'atterrissage, le rover Yutu entame ses déplacements, photographiant l'atterrisseur puis se dirigeant vers le nord, en direction du cratère d'impact que celui-ci a repéré dès son arrivée. Le lendemain, parvenu à dix mètres du cratère, il oblique vers l'ouest et, le , il parcourt une vingtaine de mètres vers le sud. Le lendemain, photographié par l'atterrisseur, il est dirigé vers le sud[8]. Trois jours plus tard, les contacts avec la terre sont interrompus en raison de la première nuit lunaire.
{kind=link}
{kind=link}
Deuxième "jour lunaire" Réveillé le , le rover poursuit sa route vers l'ouest. Le 13, il photographie un ensemble de rochers, baptisé Loong (dragon), à proximité du cratère Zi Wei de 450 m de diamètre[9]. Puis il est dirigé vers le nord-est. Le 15, alors qu'il a parcouru 114 mètres et qu'il n'est plus qu'à 18 mètres de l'atterrisseur[10], il s'immobilise. Le 16, il entreprend sa première analyse du sol mais le 25, une anomalie est détectée et ses déplacements cessent définitivement.
La fin de la mission
Des tentatives pour réactiver le rover sont entreprises durant le troisième "jour lunaire" (13-) puis dès le début du quatrième () mais toutes restent infructueuses. L'atterrisseur continue d'émettre[11]. Deux ans plus tard, en , l'agence spatiale chinoise diffuse des images jusqu'alors inédites[12]. L'astromobile Yutu cesse d'émettre des données en mars 2015[13]. Fin , quatre ans et demi après l'arrivée sur le sol lunaire, le télescope ultraviolet LUT de l'atterrisseur, continuent de fournir des données[14] La source de type radioisotope (RHU) de l'atterrisseur et les panneaux solaires pourraient doivent permettre à l'atterrisseur d'être opérationnel durant 30 ans[15].
Suites de la mission
Lors de la mission Chang'e 4, lancée fin 2018 et se déroulant à partir de , la Chine envoie un nouveau rover sur la Lune, cette fois sur sa face cachée[16]. Cette performance signe une première dans l'histoire de l'astronautique.
Avec Chang'e 5, la Chine prévoit une récolte d'échantillons lunaires et leur transfert sur Terre[17]. Initialement programmée pour 2017, cette mission a été reportée à 2019 en raison d'un échec du lanceur.
Notes et références
- (en) « Planetary Protection », sur planetaryprotection.arc.nasa.gov (consulté le ).
- (en) « Lunar Exploration - Chang'e 3 », sur http://www.sinodefence.com (consulté le )
- (en) Stephen Clark, « China's 'jade rabbit' rover lands on the moon Saturday », sur spaceflightnow.com,
- (en) « Chang'e 3 - Mission Overview - mission updates », sur http://www.spaceflight101.com (consulté le )
- (en) Rui C. Barbosa, « Chang’e-3: Chinese lunar rover heading to the Moon », sur www.Nasaspaceflight.com,
- (en) Patrick Blau, « Chang'e 3 Mission Updates », sur spaceflight101.com (consulté le )
- (en) « China to launch second lunar probe in 2010 », sur www.spacedaily.com, (consulté le )
- Premières explorations pour le cratère Yutu. Philippe Henarejos, Ciel et Espace, 24 décembre 2013. http://www.cieletespace.fr/node/11306
- Researchers Discover a New Type of Basalt on thé Moon, 25 décembre 2015
- Sky & Telescope - http://www.skyandtelescope.com/astronomy-news/change-3-lunar-layers-031320154
- (en) Emily Lakdawalla, « Yutu is NOT dead (probably) », The Planetary Society,
- Des photos couleur de la Lune étonnantes diffusées par la Chine, Direct matin, 3 février 2016
- (en) Mike Wall, « The Moon's History Is Surprisingly Complex, Chinese Rover Finds », Space.com, (lire en ligne, consulté le )
- (en) « The Chang'e-3 lunar lander is still waking up after nearly five years on the Moon », GB Times,
- (en) Andrew Jones, « China’s telescope on the Moon is still working, and could do for 30 years », GBTimes
- La Chine veut explorer la face cachée et encore vierge de la Lune, Le Monde, 15 janvier 2016
- En bref : les Chinois préparent une mission de retour d'échantillons lunaires, Rémy Decourt, Futura-Sciences, 17 août 2014
Voir aussi
Liens internes
- Astromobile
- Chang'e 1 (2007, orbiteur)
- Chang'e 2 (2010, orbiteur)
- Chang'e 5 T1 (2014, engin expérimental)
- Chang'e 4 (2019, exploration de la face cachée)
- Chang'e 5 (projet 2019, retour d'échantillons)
- Exploration de la Lune
- Programme chinois d'exploration lunaire
- Programme Lunokhod (rovers automatiques soviétiques)
- Programme spatial de la Chine
Liens externes
- Chang'e 3 – La mission lunaire : mini-site et vidéos des différentes phases de la mission sur CCTV en français.
- Chang'e 3 landing traverse : ce lien permet de découvrir l'atterrissage de la sonde
- (en) Lots of Lunar Layers Under Chang’e 3 : ce lien permet de découvrir le trajet réalisé par le rover Yutu.