Surveyor 4
Surveyor 4 est la quatrième sonde lunaire du programme Surveyor de la NASA pour explorer la Lune. Cette sonde lunaire s'écrase après la mission impeccable effectuée par Surveyor 3, quelques mois plus tôt ; le signal de télémétrie disparaît 02 min 30 s avant l'atterrissage, prévu sur Sinus Medii à 0,4° Nord et 1,33° Ouest.
Sonde spatiale ( Lune )
| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Surveyor |
| Domaine | Exploration de la Lune |
| Type de mission | Atterrisseur |
| Statut | Mission terminée (échec) |
| Autres noms | Surveyor-D |
| Base de lancement | Cape Kennedy, LC-36A |
| Lancement |
14 juillet 1967 à 11 h 53 min 29 s TU |
| Lanceur |
Atlas-Centaur (AC-11) (Atlas-D # 291 - Centaur D) |
| Fin de mission | 17 juillet 1967 |
| Durée | 65 heures |
| Durée de vie | 45 jours (mission primaire) |
| Identifiant COSPAR | 1967-068A |
| Protection planétaire | Catégorie II[1] |
| Masse au lancement |
1 037,4 kg au lancement 283 kg à l'atterrissage |
|---|---|
| Propulsion | Chimique |
| Ergols | Hydrate d'hydrazine |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 85 watts |
| Orbite | Descente directe |
|---|---|
| Atterrissage |
17 juillet 1967 à 02 h 05 min TU |
| Localisation | 0,45° N et 1,39° O (impact) |
| Topography and Texture of Lunar Soil from Television-Camera Survey | Transmission de gros plans du sol lunaire |
|---|---|
| Lunar Surface Sampler | Échantillons du sol lunaire |
Objectifs de la mission
Les principaux objectifs du programme Surveyor, une série de sept vols robotique d'atterrissage lunaire en douceur, sont de soutenir les atterrissages habités à venir du programme Apollo en : 1° développant et validant la technologie d'atterrissage en douceur sur la Lune ; 2° fournir des données sur la compatibilité de la conception du programme Apollo avec les conditions rencontrées sur le sol lunaire ; et 3° enrichir les connaissances scientifiques de la Lune.
Cette sonde spatiale est la quatrième d'une série conçue pour réaliser un atterrissage en douceur sur la Lune et pour rendre des photographies de la surface lunaire afin de déterminer les caractéristiques du sol lunaire pour les missions d'atterrissage lunaire d'Apollo.
L'équipement à bord comprend une caméra de télévision et des miroirs auxiliaires, un échantillonneur de surface de mécanique des sols, des jauges de contrainte sur les jambes d'atterrissage du vaisseau spatial et de nombreux capteurs techniques. Surveyor 4 est équipée d'une griffe de surface, avec un aimant dans la griffe, pour détecter et mesurer des éléments ferreux dans le sol lunaire.
Description du véhicule spatial
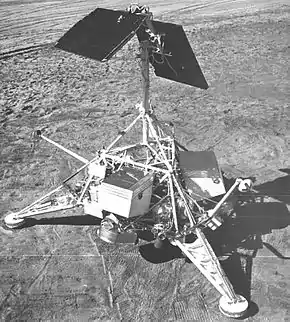
Contrairement aux atterrisseurs soviétiques Luna, Surveyor est un véritable atterrisseur, comprenant un véhicule de trois mètres de haut basé sur une structure triangulaire en aluminium à paroi mince de 27 kg avec une des trois jambes à chaque coin et un gros moteur à rétrofusée à propergol solide au centre (qui représente plus de 60% de la masse globale de la sonde lunaire). La sonde spatiale est équipé d'un système de détection de vitesse Doppler qui alimente en informations l'ordinateur du véhicule spatial pour mettre en œuvre une descente contrôlée vers la surface lunaire. Chacun des trois pieds de la sonde comporte également des amortisseurs de type avion et des jauges de contrainte pour fournir des données sur les caractéristiques d'atterrissage, importantes pour les futures missions Apollo.
La structure de base de la sonde spatiale Surveyor se compose d'un trépied de tubes en aluminium à paroi mince et d'entretoises fournissant des surfaces de montage pour les systèmes d'alimentation, de communications, de propulsion, de commande de vol et de charge utile. Un mât central s'étend à environ un mètre au-dessus du sommet du trépied. Trois jambes d'atterrissage articulées sont fixées aux bas de la structure. Les jambes en aluminium ont des amortisseurs et le mécanisme de verrouillage se termine par trois pieds avec amortisseurs. Les trois pieds s'étendent à 4,3 mètres du centre de la sonde Surveyor. Le véhicule spatial mesure 3 mètres de haut. Les jambes sont repliées pour s'insérer dans la coiffe au lancement.
Une surface de 0,855 m2 de 792 cellules photovoltaïques est montée au-dessus du mât et génère jusqu'à 85 watts de puissance emmagasinée dans un accumulateur argent-zinc. Les communications sont réalisées via une antenne mobile à gain élevé montée près du haut du mât central pour transmettre des images de télévision, deux antennes omnidirectionnelles montées aux extrémités du mât pour les liaisons montante et descendante, ainsi que deux récepteurs et deux émetteurs.
Le contrôle thermique est obtenu par une combinaison de peinture blanche, de finition thermique à haute émittance infrarouge et de dessous en aluminium poli. Deux compartiments à contrôle thermique, équipés de couvertures super-isolantes, d'interrupteurs thermiques et de petits radiateurs électriques, sont montés sur la structure de la sonde spatiale. Un compartiment, maintenu entre 5 et 50 °C, abrite les communications et l'électronique pour l'alimentation. L'autre, entre −20 et 50 °C, abrite les composants de commande et de traitement du signal.
La caméra de télévision est montée près du sommet du trépied et des jauges de contrainte, des capteurs de température et d'autres instruments d'ingénierie sont intégrés dans toute la sonde spatiale. Une cible photométrique est montée près de l'extrémité d'une des jambes d'atterrissage et une sur une courte perche s'étendant au bas de la structure. D'autres ensembles de charges utiles, qui diffèrent d'une mission à l'autre, sont montés sur différentes parties de la structure dépendant de leur fonction.
Un capteur solaire, un viseur de l'étoile Canopus et des gyroscopes sur trois axes fournissent une connaissance de l'attitude. La propulsion et le contrôle d'attitude sont assurés par des jets d'azote gazeux froid durant les phases de la trajectoire, trois moteurs-fusées à vernier durant les phases propulsées, y compris l'atterrissage, et le moteur à propergol solide durant la descente finale. La rétrofusée est un boîtier sphérique en acier monté au centre inférieur de la sonde spatiale.
Les moteurs verniers utilisent du carburant hydrate d'hydrazine et un oxydant MON-10 (90% N2O2, 10% NO). Chaque chambre peut produire 130 N à 460 N de poussée sur commande, un moteur peut pivoter pour contrôler le roulis. Le carburant est emmagasiné dans des réservoirs sphériques montés sur la structure du trépied. Pour la séquence d'atterrissage, un radar d'altitude déclenche la mise à feu de la rétrofusée principale pour le freinage primaire. Une fois l'allumage terminé, la rétrofusée et le radar sont largués et les radars doppler et altimètre sont activés. Ceux-ci fournissent des informations au pilote automatique qui contrôle le système de propulsion vernier à l'atterrissage.
Surveyor 4 est de conception similaire aux autres Surveyor mais présente plusieurs changements dans sa charge utile. Il transporte une caméra de télévision, des expériences de mécanique des sols et des appareils pour mesurer la température et la réflectivité radar comme lors des missions précédentes, mais la caméra de télévision a un capot anti-éblouissement. Un échantillonneur de surface, composé d'une pelle de 12 cm de long par 5 cm de large montée sur un bras pantographe de 1,5 mètre. Deux miroirs auxiliaires plats sont fixés à la structure pour fournir à la caméra une vue du sol lunaire sous les moteurs et de l'un des 3 pieds. La sonde Surveyor 4 a une masse de 1 037,4 kg au lancement et 283 kg à l'atterrissage.
Description des instruments
Topographie et texture du sol lunaire à partir d'une étude par caméra de télévision
La caméra de télévision consiste en un tube Vidicon, de deux objectifs de 25 mm et 100 mm de focale, d'obturateurs, de filtres et de diaphragmes montés sur un axe incliné d'environ 16° par rapport à l'axe central de la sonde spatiale. La caméra est montée sous un miroir qui peut être déplacé en azimut et en élévation. Le fonctionnement de la caméra dépend totalement de la réception des commandes de la Terre. La couverture image par image du sol lunaire est obtenue sur 360° en azimut et de 40° au-dessus du plan perpendiculaire à l'axe de la caméra et jusqu'à 65° en dessous de ce plan.
Les deux modes de fonctionnement sont de 200 lignes et de 600 lignes. Le mode 200 lignes est transmis par une antenne omnidirectionnelle et numérise une image toutes les 61,8 secondes. La transmission vidéo complète de chaque image de 200 lignes nécessite 20 secondes et une bande passante de 1,2 kHz.
Les images de 600 lignes sont transmises par une antenne directionnelle, ces images sont analysées toutes les 3,6 secondes. Chaque image de 600 lignes nécessite nominalement 1 seconde pour être lue à partir du Vidicon et nécessite une bande passante de 220 kHz pour la transmission. Les transmissions de données sont converties en un signal de télévision standard. Les images de télévision sont affichées sur Terre sur un écran à balayage lent avec un phosphore à longue rémanence. La rémanence est choisie pour correspondre à la valeur nominale maximale de la vitesse de balayage. Une image de télévision d'identification est reçue pour chaque nouvelle image et est affichée en temps réel à un rythme compatible avec la vitesse d'arrivée de la nouvelle image. Ces données sont enregistrées sur un magnétoscope vidéo et sur un film de 70 mm.
En raison de l'échec de la mission, aucune donnée n'est retournée de cette expérience.
Échantillonneur de surface pour la mécanique du sol lunaire
L'échantillonneur de surface de mécanique des sols est conçu pour creuser, gratter et creuser des tranchées à la surface lunaire et pour transporter des matériaux de surface tout en étant photographié afin que les propriétés de la surface puissent être déterminées. L'échantillonneur est monté sous la caméra de télévision et consiste principalement en une pelle d'environ 12 cm de long et 5 cm de large. La pelle se compose d'un récipient, d'une lame affûtée et d'un moteur électrique pour ouvrir et fermer le récipient. Une petite semelle est attachée à la porte de la pelle pour présenter une surface plane à la surface lunaire. La pelle est capable de contenir une quantité maximale d'environ 3,2 cm de diamètre de matériau lunaire solide et un maximum de 100 cm3 de matériau granulaire. La pelle est monté sur un bras de pantographe qui peut être étendu à environ 1,5 m ou rétracté à proximité du moteur de la sonde spatiale. Le bras peut être déplacé d'un azimut de +40° à -72° ou être élevé de 13 cm par un moteur. Il peut être projeté sur la surface lunaire par la force fournie par la gravité et un ressort. L'échantillonneur de surface effectue sept essais de portance, quatre essais de creusement de tranchée et treize essais d'impact.
En raison de l'échec de la mission, l'échantillonneur de surface n'a jamais été déployé.
Déroulement de la mission
Surveyor 4 est lancé le à 11 h 53 min 29 s TU depuis l'aire de lancement LC-36A à la base de lancement de Cap Kennedy sur le lanceur Atlas-Centaur (AC-11). L'étage Centaur place la sonde spatiale sur une orbite d'attente terrestre, puis redémarre plus tard et injecte la sonde spatiale Surveyor 4 sur une trajectoire lunaire.
Après un vol sans faille vers la Lune, les signaux radio de la sonde spatiale cessent lors de la phase de descente finale le , environ 2,5 min avant l'atterrissage. Le contact avec le véhicule spatial ne s'est jamais rétabli et la mission est un échec. La cible d'atterrissage d'origine est Sinus Medii (Baie du centre) à 0,4° N et 1,33° O.
La mission est réussie jusqu'à ce que toutes les communications soient brusquement perdues deux secondes avant l'arrêt de la rétrofusée à 02 h 03 TU le , deux minutes et demie seulement avant d'atterrir sur la Lune. La NASA pense que la rétrofusée à propergol solide pourrait avoir explosé, détruisant la sonde lunaire Surveyor 4.
Notes et références
Bibliographie
- (en) David M. Harland, Paving the way for Apollo 11, Springer, , 472 p. (ISBN 978-0-387-68131-3)Histoire détaillée des programmes de sondes lunaires américaines (Surveyor, Ranger, Lunar Orbiter) liés au programme Apollo.