Moment d'une force
Le moment d'une force par rapport à un point donné est une grandeur physique vectorielle traduisant l'aptitude de cette force à faire tourner un système mécanique autour de ce point, souvent appelé pivot. Il s'exprime habituellement en N m (newtons mètres) par radian, et peut l'être de manière équivalente en joules par radian. Le moment d'un ensemble de forces, et notamment d'un couple, est la somme (géométrique) des moments de ces forces.



La projection du moment (d'une force par rapport à un point) sur un axe Δ (orienté) contenant le point s'appelle moment de la force par rapport à l'axe Δ : c'est une grandeur scalaire algébrique exprimée dans la même unité, et traduisant de même la faculté de la force appliquée à faire tourner le système mécanique autour de l'axe Δ, le signe du moment par rapport à l'axe traduisant le sens de la rotation par rapport à l'orientation choisie de l'axe.
Approche élémentaire : le levier
Le concept de moment d'une force par rapport à un point, se distinguant de la force appliquée en un point, remonte dans sa formulation à l'étude d'Archimède sur les leviers. En mécanique statique, c'est l'étude de l'équilibre des moments qui permet de prévoir l'équilibre des bras d'une balance ou l'effet de levier d'une articulation. En dynamique du solide, c'est le déséquilibre de ces mêmes moments qui va mettre en rotation le corps qui y est soumis.
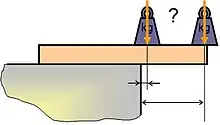
Pour déséquilibrer une planche en équilibre au bord d'un muret, on peut poser une charge sur la partie en porte-à-faux, au-dessus du vide. La capacité de cette charge à faire basculer la planche n'est pas la même suivant qu'elle est posée près du muret ou au bout de la planche. De même on peut, au même endroit, placer une charge plus lourde et constater une différence de basculement.
Le « pouvoir de basculement » dépend donc de l'intensité de la force, mais également de la position relative du point d'application de la force, et du point de rotation réel ou virtuel considéré. On intègre ces trois composantes du problème par le modèle de moment d'une force, qui représente l'aptitude d'une force à faire tourner un système mécanique autour d'un point donné, qu'on nommera pivot.
.jpg.webp)
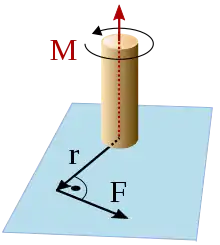
La capacité à mettre en mouvement un solide par rapport à un axe de rotation correspond également à la mobilisation d'une certaine énergie, qui est ici fournie par la force dont on étudie l'effet de levier. Sous l'effet d'une rotation élémentaire dθ, le point P d'application de la force se déplace d'une distance r · dθ, si r est le « bras de levier », c'est-à-dire la distance du point P à l'axe de rotation. L'énergie fournie au solide dépendra du produit de cette distance r · dθ par la composante de la force parallèle à ce déplacement. Le « pouvoir de basculement » de la force sera donc plus exactement le produit du bras de levier par la composante tangentielle de la force.
Une balance romaine illustre parfaitement ce qu'est l'égalité des moments. Lors d'une pesée, les deux poids suspendus sont sensiblement perpendiculaires au fléau, et donc le « pouvoir de basculement » des deux poids sera équilibré si le produit du poids par la distance est égal dans les deux cas. D'un côté, la distance est fixe mais le poids est inconnu, de l'autre le poids est fixe mais la distance est variable, et la balance permet donc de lire le poids inconnu sur la gradation de longueur portée par le fléau.
Grandeur physique
Moment scalaire d'une force
Le moment d'une force s'apprécie par rapport à l'axe autour duquel le solide va tourner. Il s'agit soit d'un axe imposé physiquement par une liaison mécanique, comme dans le mouvement d'une roue, soit du mouvement d'orientation de ce solide par rapport à son centre de gravité, indépendamment du mouvement de ce centre. Dans le cas d'un axe physique, le moment peut être étudié par projection sur un plan perpendiculaire à l'axe, puisque la composante parallèle n'entraînera pas de rotation autour de l'axe. Dans le cas du mouvement autour du centre de gravité, le moment peut de même être étudié dans le plan défini par le centre de gravité, le point d'application de la force, et la direction de cette force, parce que la rotation aura lieu nécessairement par rapport à ce plan faute d'un effort en rotation dans la direction perpendiculaire. Dans un cas comme dans l'autre, le phénomène physique peut s'analyser dans un plan, et l'on cherche à déterminer l'effort en rotation autour d'un point O d'une force appliquée en un point P.

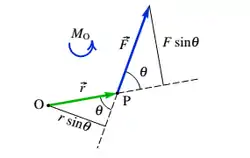
Dans le plan d'étude, si l'on note le vecteur et θ l'angle de à , on voit qu'il est possible de décomposer la force et son effet en deux composants, l'un parallèle à et d'intensité F · cos θ, l'autre perpendiculaire et d'intensité F · sin θ. Clairement, la composante parallèle ne peut pas jouer de rôle dans une rotation par rapport à O, puisqu'elle ne fait que pousser contre l'axe de rotation ; et donc l'effort en rotation ne peut être proportionnel qu'à la composante F · sin θ.


Par définition, la norme MO du moment par rapport à un point O d'une force appliquée en un point P est proportionnelle à cette composante F · sin θ et à la distance OP. De manière équivalente, le moment est égal à l'intensité de la force, multipliée par le bras de levier de son point d'application, c'est-à-dire la distance entre le point O et la droite passant par P et de direction , laquelle vaut r · sin θ :

Représentation vectorielle du moment

Par construction, le moment va faire tourner le système physique autour du point O, dans une rotation contenue dans le plan de la figure. Dans l'étude du mouvement d'un solide en trois dimensions, la rotation induite fait glisser sur lui-même le plan passant par le point P d'application de la force, le centre O, et contenant la direction de la force , c'est-à-dire le plan d'étude précédent. Cette même rotation laisse invariant l'axe de rotation, qui est la perpendiculaire à ce plan passant par le centre O.
Physiquement, donc, le moment d'une force par rapport à un point ne peut pas se limiter à un scalaire M = r · F · sin θ, l'effet du moment est intrinsèquement lié à une directionnalité, qui va ici déterminer l'axe de rotation. L'association d'une norme et d'une direction correspond à la notion de vecteur, la définition complète du moment aura ainsi un caractère vectoriel.
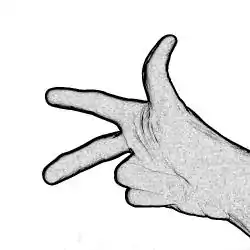
Par convention, la représentation du moment sera un vecteur porté par l'axe de rotation, de norme M = r · F · sin θ, et dont le sens est donné par la règle de la main droite. Cette construction est, par définition, le produit vectoriel des deux vecteurs et :

Mnémoniques

La règle de la main droite est une règle générale d'orientation de l'espace, permettant de déterminer dans quel sens est conventionnellement représenté un produit vectoriel. Les trois doigts étant pris dans l'ordre, pouce, index et majeur, la règle est que le produit vectoriel du pouce par l'index est conventionnellement dans la direction du majeur.
La règle de la main droite est la règle générale d'orientation des trièdres directs. Pour l'appliquer, il faut bien noter que dans le produit vectoriel, le déplacement est pris avant la force , l'inversion des deux vecteurs donnerait le résultat inverse (le produit vectoriel est antisymétrique). Pour s'en souvenir, on peut se rappeler que pour faire tourner un système, c'est le point d'application qui est choisi en premier par rapport au point de rotation, l'intensité de la force appliquée étant variable et déterminée ensuite, et le moment résultant, conséquence des deux précédents, vient évidemment en troisième position. On a donc, dans l'ordre :

Si l'on veut s'appuyer non pas sur la règle générale d'orientation du produit vectoriel, mais sur un mnémonique plus parlant, on peut inverser l'ordre de prise en compte et utiliser la règle de la main gauche pour dire que la « force qui pousse » étant dans la direction du pouce, et l'index indiquant la direction du point d'application, l'orientation du couple est donnée par le majeur de la main gauche. Pour se rappeler la différence, on peut par exemple se dire que l'alliance se portant sur la main gauche, c'est à cette main que l'on repère le couple.
Caractère pseudovectoriel du moment

Comme précisé ci-dessus, un moment est une grandeur physique qui présente un caractère d'orientation marqué, puisqu'il est nécessairement associé à la direction d'un axe de rotation. Étant défini par une norme et une direction, le moment peut être représenté par un vecteur. Mais ce n'est pas un vecteur vrai, au sens physique du terme, comme le sont un déplacement, une vitesse, ou un champ électrique, lesquels sont entièrement déterminés par la physique du système.
Ici, l'axe de rotation donne bien une direction, mais laisse indéterminé le sens suivant lequel doit être compté le vecteur. Ce sens n'est pas donné par la physique du système, mais par une convention : celle de la règle de la main droite, qui gouverne le sens dans lequel doit être compté un produit vectoriel. C'est pour cette raison que l'on nomme le moment un pseudovecteur, non un vecteur vrai, et que comme tous les produits vectoriels, il est parfois noté avec une flèche courbe , pour rappeler ce caractère en partie artificiel (et lié à un mouvement de rotation).

En pratique, les notations (pseudovecteur) et (vecteur) sont confondues et indifféremment utilisées pour représenter un moment.


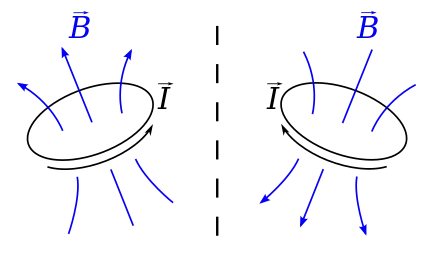
Le caractère « non déterminé physiquement » d'un pseudovecteur apparaît si le système physique est remplacé par son image dans un miroir ou par une symétrie centrale. Les règles de la physique sont normalement indépendantes du choix d'un repère pour les exprimer. Donc, pour tout ce qui est physiquement déterminé, on doit avoir la même expression, que le repère soit direct ou indirect. Ce n'est pas le cas du moment : si l'on prend l'image du déplacement et de la force par une symétrie centrale, ce qui revient à les changer de signe, le produit vectoriel ne « voit » qu'une rotation d'un demi-tour dans le plan. Il n'est pas transformé en son symétrique mais reste inchangé, parce que par définition, il est toujours gouverné par la règle de la main droite. Ou, de manière équivalente, son image subit la symétrie centrale du système physique, mais de plus change de signe, à cause de la convention d'orientation. Dans le cas d'une symétrie miroir, de même, un pseudovecteur subit la symétrie physique, et de plus change de signe à cause de la convention d'orientation.

Unités
Dans le Système international d'unités, on exprime le moment en newtons mètres (N m), et le moment a donc théoriquement pour dimension kg⋅m2⋅s−2. La mesure d'un moment (bras de levier × force) est effectivement de dimension homogène à un travail ou une énergie (en joules, déplacement × force), mais il est préférable, pour éviter les confusions, d'exprimer cette grandeur dans l'unité qui rappelle comment elle est définie[alpha 1] - [1]. Ces deux grandeurs physiques sont en effet de nature différente, l'énergie étant un scalaire et le moment un pseudovecteur.
Un moment de 1 N m appliqué à un axe représente un apport d'énergie de 1 joule (J) par radian, soit 2 π J par tour. L'unité SI du moment peut donc s'écrire J rad−1, le terme en radian venant rappeler qu'il s'agit d'une grandeur appartenant au domaine du mouvement de rotation. Dans cette optique, la dimension du moment en unités du Système international est en réalité kg⋅m2⋅s−2⋅rad−1, où le terme en « rad » est d'écriture facultative.
Dans des documents historiques, on peut rencontrer le dyne cm valant e–7 N m, le kg m valant 9,806 65 N m, et dans des documents utilisant des unités de mesure anglo-saxonnes, des ounce inch valant 7,06 e–3 N m, des pound foot valant 1,35 N m, pounds inch valant 0,13 N m[2].
On voit également l'unité décanewton mètre (daN m), qui est à peu près équivalente à un kilogramme-force appliqué à une distance d'un mètre.
Moment et cinématique
Le champ vectoriel définissant le moment d'une force en chaque point est un cas particulier de torseur.
Principe fondamental de la dynamique
L'accélération angulaire est l'une des variables de la deuxième loi de Newton appliquée en dynamique de rotation. Ainsi, on peut déterminer l'accélération angulaire d'un corps rigide à partir du total des moments de forces qui lui sont appliqués et de son tenseur d'inertie [J], ou de son moment d'inertie JΔ par rapport à un axe Δ.


D'une façon générale, la somme de tous les moments de force est égale au produit du tenseur d'inertie [J] par le vecteur accélération angulaire :
- lorsque la rotation ne peut s'effectuer qu'autour d'un axe de rotation fixe Δ, la somme de tous les moments de force par rapport à Δ est égale au produit du moment d'inertie du corps (par rapport à Δ) par son accélération angulaire α[alpha 2] - [3] :
- .
![{\displaystyle \sum _{i}{\vec {\tau }}_{i}=[J]\,{\vec {\alpha }}}](https://img.franco.wiki/i/b66a326fcba1392f0caa9661f5c968cbd86a6c74.svg)

Théorème du moment cinétique
En dynamique, on montre que la somme des moments des forces par rapport à un point est égale à la dérivée temporelle du moment cinétique par rapport au même point :

Ce résultat, appelé théorème du moment cinétique, est l'équivalent pour la dynamique de rotation du principe fondamental de la dynamique (deuxième loi de Newton).
Il est également possible de montrer que si est le vecteur vitesse angulaire, c'est-à-dire le vecteur

- colinéaire à l'axe de rotation fixe dans (R),
- dont la norme est la vitesse angulaire
- et orienté de façon que l'orientation positive d'un plan normal correspond au sens de rotation

alors :

où est le moment d'inertie du solide par rapport à l'axe de rotation .

Moment d'une force par rapport à un point






Définition
Le moment d'une force s'exerçant au point P par rapport au point O, est le pseudovecteur :

où désigne le produit vectoriel.
Ce pseudovecteur, à la fois orthogonal à et au bipoint , est normal au plan dans lequel a lieu la rotation que peut provoquer la force et il est colinéaire à l'axe de cette rotation. Le sens du moment est donné par le sens de la rotation provoquée par la force.
Si d est la distance orthogonale du pivot P à la droite d'action (droite définie par le vecteur force), alors la norme du moment vaut :
- .

La distance d est appelée bras de levier. Dans le cas bidimensionnel, il est d'usage d'assimiler la norme du moment au moment lui-même, celui-ci ne comportant qu'une composante non nulle.
Les composantes et la norme d'un moment de force sont exprimées en newton-mètre (N m), dans le Système international d'unités et leurs dimensions sont M L2 T−2 ; formellement, cette unité a la dimension d'une énergie, et pourrait donc s'exprimer comme valant 1 joule (voir l'article Couple (physique)).
Cas de nullité du moment
Puisqu'il s'agit ensuite d'établir la somme nulle des moments, on peut naturellement s'intéresser aux cas de nullité individuelle des moments de force ; de par les propriétés du produit vectoriel :
- la force est nulle ;
- le bipoint est . La force est donc appliquée en O.
- et sont colinéaires ; alors la droite d'action passe par O, ce qui inclut aussi le cas précédent.

Translation du pivot : formule de Varignon
Lorsque le moment d'une force (appliquée en P) est connu en un point O, il est possible de le recalculer en n'importe quel point Q de l'espace. Cette opération est inévitable lors de la manipulation des torseurs d'actions mécaniques. Cela revient à poser une rallonge au levier OP. Il vient alors : .

De là découle la formule dite de Varignon, aussi appelée formule de transport des moments :
- .

Il existe un moyen mnémotechnique pour retenir cette formule, à l'aide de l'acronyme « BABAR ». Le moment en B est égal au moment en A plus vectoriel (la résultante des forces) : .



Ce résultat montre qu'on peut déterminer le moment par rapport à tout point de l'espace à partir d'un seul point. La relation montre également que le champ des vecteurs des moments défini par rapport à tout point de l'espace est un champ équiprojectif (associé à l'endomorphisme antisymétrique défini par ).


Il se déduit de la formule de Varignon la relation d'équiprojectivité des moments de force :
- .

En réalité une force est modélisée par un vecteur (représentant la force) et son point d'application. Il est possible de représenter cette action mécanique par le couple de vecteurs force et moment en un point, qui sont les éléments de réduction du torseur d'action mécanique. La relation d'équilibre liée au principe fondamental de la statique devient une somme de torseurs. En pratique, on effectuera parallèlement la somme des forces et la somme des moments, tous exprimés au même point, d'où l'intérêt de la formule de transport des moments.
Moment par rapport à un axe
Lorsqu'un solide est animé d'un mouvement de rotation autour d'un axe, il est intéressant de ne considérer que la partie utile du moment d'une force.
On définit le moment de la force par rapport à un axe Δ par :
![{\displaystyle M_{\Delta }{\big (}{\vec {F}}{\big )}={\vec {M}}_{P}{\big (}{\vec {F}}{\big )}\cdot {\vec {u}}=\left({\overrightarrow {PA}}\wedge {\vec {F}}\right)\cdot {\vec {u}}=\left[{\overrightarrow {PA}},{\vec {F}},{\vec {u}}\right]}](https://img.franco.wiki/i/cff9f60dc65f48e38acb093c34c8a1bc20cf6315.svg)
où est un vecteur unitaire de l'axe Δ, P est un point quelconque de Δ, et est le produit mixte.

![{\textstyle \left[{\overrightarrow {PA}},{\vec {F}},{\vec {u}}\right]}](https://img.franco.wiki/i/2aedde1bf1071b814325e45c365d60904cb803aa.svg)
En résumé il s'agit de la composante suivant du moment de exercé en A. De ce fait, le moment d'une force par rapport à un axe est un scalaire : le produit scalaire dénote l'opération de projection sur l'axe Δ (dont est un vecteur unitaire). D'un point de vue mécanique, le moment par rapport à l'axe est la seule composante « utile » (susceptible de fournir une puissance) du moment.
Le moment par rapport à l'axe est nul si :
- le moment par rapport au point est nul ;
- la force est dans la direction de l'axe considéré.
Moment d'un couple de forces
De façon générale, un ensemble de forces (de points d'application ) engendre un couple de forces, noté , si la résultante des forces est nulle , mais avec la somme des moments qui ne l'est pas .





L'exemple le plus simple est celui de deux forces opposées ( et ) appliquées en deux points distincts d'un même système : leur somme est évidemment nulle, cependant leur action engendre une rotation du système. Cet exemple est à l'origine de l’appellation « couple de forces ».

Le moment du couple de forces est indépendant du point de pivot P considéré. Il n'est donc pas nécessaire de préciser le point de rotation, contrairement à un moment.
Notes et références
Notes
- Un moment de force ne sera jamais égal, sauf coïncidence purement numérique, au travail d'une force, ce sont des grandeurs ayant en réalité des dimensions différentes. À la vérité le newton mètre devrait avoir pour symbole m∧N, qui serait différent de m N (= J).
- Quand l'axe de rotation n'est pas l'un des axes principaux d'inertie du corps considérés l'axe fixe exerce lui-même un moment de force qui se rajoute aux autres.
Références
- Le Système international d'unités (SI), Sèvres, Bureau international des poids et mesures, , 9e éd., 216 p. (ISBN 978-92-822-2272-0, lire en ligne [PDF]), p. 29.
- (en) « Guide for the Use of the International System of Units (SI) », sur physics.nist.gov.
- Benson 2009, p. 337-340 (Expression valable lorsque l'axe de rotation est l'un des axes principaux d'inertie du corps considéré.)
Voir aussi
Articles connexes
Liens externes
- (histoire des sciences) L'étude de la notion de couple et de moment par Poinsot (1803), en ligne et commenté sur BibNum.