Modèle rhéologique
Un modèle rhéologique est un modèle utilisé pour modéliser le comportement d’un matériau, c’est-à-dire pour simuler sa réponse à une sollicitation mécanique. Concernant la viscoélasticité linéaire, des modèles analogiques empiriques ont été proposés ; ils sont composés d’une combinaison de connexions en série et/ou parallèle de ressorts (de coefficients d’élasticité Ei) et d’amortisseurs (de coefficients de viscosité ) élémentaires, représentant les composantes élastique et visqueuse, respectivement. Il existe des modèles performants pour décrire la viscoélasticité, approchant de façon satisfaisante les courbes de caractérisation mécanique, mais de complexité mathématique élevée. Certaines lois de comportement sont intégrées dans des logiciels de calcul par éléments finis traitant la viscoélasticité.


Les fluides viscoélastiques peuvent aussi être représentés par des modèles analogiques électriques.
Modèles élémentaires
- Ressort : ce modèle (analogique) représente le solide hookéen : comportement mécanique purement élastique ; loi de Hooke (modèle mathématique) .

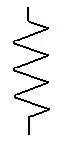
- Amortisseur : ce modèle représente le fluide newtonien : comportement visqueux (ou liquide) newtonien ; loi de Newton .


- Patin (ou élément de Saint-Venant) : modèle représentant le solide rigide parfaitement plastique ; il introduit une non linéarité dans les modèles ; il décrit un comportement plastique (déformation irréversible) ; utilisé pour les fluides à seuil ; la contrainte appliquée doit dépasser un seuil de plasticité (appelé aussi seuil de déformabilité, de friction, contrainte d'écoulement) pour obtenir un déplacement.

Modèles viscoélastiques
On distingue :
- modèle de Kelvin-Voigt (ou modèle de Voigt) : représente le solide de Kelvin-Voigt ; ne décrit pas la relaxation de contrainte d’un matériau ;
- modèle de Kelvin-Voigt généralisé : constitué d’un assemblage en série de n modèles de Kelvin-Voigt ; inadapté pour décrire la relaxation ;
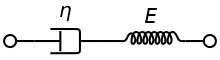
- modèle de Maxwell : représente le modèle le plus simple du liquide viscoélastique ; ne décrit pas le fluage ; voir aussi Relaxation de contrainte ;
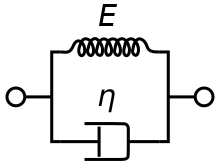
- modèle de Zener ou modèle du solide linéaire standard (en) (SLS) : composé d’un modèle de Maxwell et d’un ressort (apportant l’élasticité instantanée) assemblés en parallèle ; le modèle le plus simple prédisant à la fois le fluage et la relaxation de contrainte ; simule de façon satisfaisante un polymère densément réticulé ;
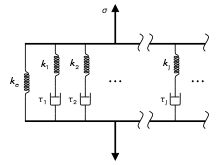
- modèle de Maxwell généralisé (ou modèle de Maxwell–Wiechert) : composé de n modèles de Maxwell mis en parallèle, une branche parallèle supplémentaire est composée d’un ressort pour assurer une recouvrance totale, pour représenter un comportement solide ; constitue une généralisation du modèle de Zener en introduisant plusieurs temps de relaxation[1] ; inextricable en fluage ; modèle couramment utilisé en viscoélasticité linéaire ; voir aussi Relaxation de contrainte ;
- modèle de Maxwell convecté supérieur : généralisation du modèle de Maxwell ;
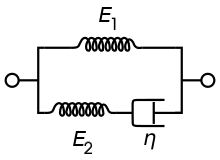
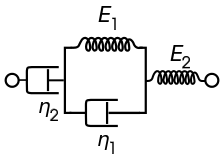
- modèle de Burgers (en) : association en série d’un modèle de Maxwell avec un modèle de Kelvin-Voigt ; décrit de façon satisfaisante le comportement en fluage ;
- modèle de Wagner (en) : développé pour la prédiction des propriétés viscoélastiques des polymères ;
- modèle de Bernstein-Kearsley-Zapas : le modèle de Wagner peut être considéré comme une forme pratique simplifiée de ce modèle ;
- modèle de Arruda–Boyce (en) : utilisé pour décrire le comportement mécanique des élastomères et polymères ;
- solide néo-hookéen (en) : modèle pour matériau hyperélastique, similaire à la loi de Hooke ;
- solide de Mooney–Rivlin (en) : modèle pour matériau hyperélastique ;
- modèle de Gent (en) : modèle pour matériau hyperélastique ;
- modèle Oldroyd-B (en) : utilisé pour décrire l’écoulement de fluides viscoélastiques ;
- modèle hyperélastique polynomial (en) : modèle phénoménologique de l’élasticité caoutchoutique.
Modèles plastiques
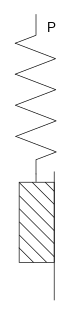
- Modèle de Saint-Venant (ou modèle de Prandtl) : ressort et patin assemblés en série ; décrit un comportement solide élastique linéaire parfaitement plastique (élasto-plastique) sans écrouissage ; les déformations sont élastiques sous faible contrainte (sous le seuil de plasticité).
- Modèle de Saint-Venant généralisé : des ressorts et des patins sont associés en série ou en parallèle ; décrit le solide élasto-plastique écrouissable.
- Modèle de Képés (ou modèle de Prager) : ressort et patin combinés en parallèle ; décrit un comportement élasto-plastique ; l’écrouissage est linéaire et cinématique.
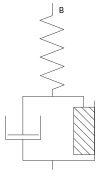
- Modèle de Bingham : ressort en série avec un patin en parallèle avec un amortisseur ; modèle d’un corps élasto-viscoplastique.
- Modèle de Bingham généralisé.
- Modèle de Schwedoff.
- Modèle de Schofield-Scott Blair.
Modèles avec rhéofluidification
- Modèle cross et dérivés : cross-exp, cross-WLF.
Notes et références
- Ne pas confondre le temps caractéristique d’un phénomène de retard (fluage) et le temps caractéristique d’un phénomène de relaxation.
Voir aussi
Articles connexes
- Rhéologie des solides (chapitre « Les modèles rhéologiques de base »)
- Module d'élasticité
- Viscosité
- Analyse mécanique dynamique
- Nombre de Deborah, représente la vitesse à laquelle l’énergie élastique est stockée ou restituée.
- Viscoplasticité
Liens externes
- Sidoroff François, « Mécanique des milieux continus » [PDF], p. 53-55, École centrale de Lyon.
- (en) « RheoChart », logiciel graphique pour analyser le comportement de modèles viscoélastiques différentiels (version d’essai téléchargeable).