Résonateur (horlogerie)
Le résonateur horloger permet de fixer, de façon la plus stable possible, une fréquence d'oscillation. Associé au système de comptage et d'entretien, il forme l'oscillateur, appelé parfois « régulateur »[note 1], et fournit ainsi un moyen de mesure du temps.

On trouve en horlogerie, principalement deux types de résonateurs : les résonateurs mécaniques (par ex. balancier-spiral, pendule...) et les résonateurs électromécaniques (par ex. quartz).
Types de résonateurs
Dans les montres mécaniques
Dans les montres mécaniques, l'oscillateur actuellement le plus utilisé est constitué d'un résonateur mécanique de type balancier-spiral, couplé à un échappement à ancre suisse[1].
Le résonateur est caractérisé par la raideur angulaire du spiral et le moment d'inertie du balancier qui fixent, à eux deux, la fréquence de résonance[2] :




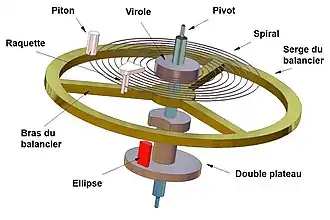
Le spiral est attaché à l'axe du balancier par la virole et à la cage (châssis du mouvement) par le piton. Le balancier comporte une serge, qui contribue en grande partie à son inertie et qui est soutenue par des bras. Il est monté sur un axe dont les pivots sont fabriqués de manière à minimiser les frottements. Le bout des pivots fait typiquement le diamètre d'un cheveu (environ 80 μm), il est donc extrêmement fragile ; on le protège par des systèmes antichocs. L'axe porte également le double plateau avec sa cheville (ou ellipse), qui interagit avec l'ancre de l'échappement.
Dans les horloges mécaniques ou les pendules
Dans les horloges mécaniques, le résonateur le plus utilisé est le pendule. Il est couplé à un échappement Graham, un échappement à chevilles ou un échappement Brocot[1].
Le résonateur est caractérisé par la gravité et la longueur du pendule (cas du pendule simple). Sa fréquence de résonance est[2] :



Cette fréquence n'est valide que pour les petites amplitudes du résonateur. Si le pendule effectue de grandes oscillations (> 3°), la fréquence sera légèrement plus basse.
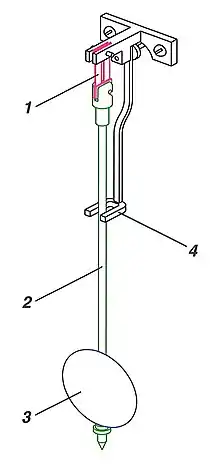
Différents types de suspensions existent, comme la suspension à couteau, utilisée pour les pendules de grande taille ou la suspension à lame de ressort, comme c'est le cas sur la figure ci-contre.
Mentionnons encore les pendules Atmos, qui ont la particularité de fonctionner grâce aux variations atmosphériques et qui utilisent comme résonateur un pendule de torsion.
Résonateurs électriques
Le résonateur purement électrique de type circuit LC n'est pas utilisé en horlogerie. La stabilité de sa fréquence, en particulier en fonction de la température, n'est pas suffisante et son facteur de qualité est trop faible ; l'énergie nécessaire pour maintenir ses oscillations est trop élevée.
Résonateurs électromécaniques
Le résonateur à quartz est souvent utilisé dans les systèmes électroniques, lorsqu'une fréquence précise est nécessaire. Le quartz monocristallin est un matériau piézoélectrique couplant oscillations mécaniques et électriques. Il peut être de formes diverses selon la fréquence de l'oscillateur.
Dans les montres électroniques, le résonateur est un quartz en forme de diapason oscillant à une fréquence de 32 768 Hz (=215). Il a une bonne stabilité en fréquence et le maintien de ses oscillations ne nécessite que peu d'énergie.
Notons également que de nouveaux types de résonateurs électromécaniques, à base de silicium, ont fait leur apparition vers 2005[3]. Les oscillations de la structure en silicium sont excitées de manière capacitive. La structure est réalisée par des technologies de microfabrication, connues sous le terme MEMS.
Résonateurs atomiques
On peut encore mentionner les résonateurs atomiques[4], qui utilisent les niveaux d'énergie qu'ont les électrons dans les atomes. Les horloges atomiques peuvent être d'une très grande précision. En 2015, l'une d'elles a atteint une précision symbolique de une seconde sur l'âge de l'univers (environ 13,8 milliards d'années)[5].
Propriétés du résonateur
La propriété la plus importante du résonateur horloger est la précision et la stabilité de sa fréquence de résonance . La précision de cette fréquence déterminera la précision de la montre ou de l'horloge.
Les autres propriétés qui caractérisent le résonateur sont: l'amplitude des oscillations ; les frottements, représentés par le facteur de qualité ; sa dépendance thermique ; sa réaction à l'environnement, comme par exemple au champ magnétique, à l'humidité ou encore aux chocs.
La marche
La marche de la montre donne l'erreur de fréquence de son oscillateur[2] :

- ,

où est la fréquence de résonance de l'oscillateur (résonateur + entretien) et est la fréquence que devrait avoir l'oscillateur pour indiquer l'heure de manière exacte.

Exprimée avec la période :

- ,

où est la période réelle de l'oscillateur et est sa période théorique.


La marche s'exprime généralement en s/d (seconde par jour). Elle peut également être exprimée en % ou en ppm (partie par million). 1 s/d correspond à 11,6 ppm.
Le réglage de la marche d'une montre mécanique peut se faire de deux manières différentes:
- en modifiant la rigidité du ressort spiral, par exemple en jouant sur sa longueur active à l'aide d'une raquette mobile ;
- en modifiant l'inertie du balancier, par exemple à l'aide de vis sur sa serge.
Dans les pendules, on ajuste la longueur du pendule. Dans les montres à quartz, on règle la marche en ajustant une capacité ou en modifiant l'inhibition.
Anisochronisme
L'anisochronisme, parfois appelé « défaut d'isochronisme », représente toute variation de la marche due à l'environnement. On distingue par exemple les anisochronismes thermique, magnétique, barométrique, etc.
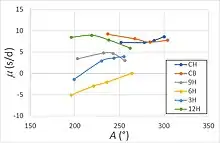
En horlogerie, on utilise en général ce mot pour parler de l'anisochronisme d'amplitude (en fonction de l'amplitude des oscillations) et l'anisochronisme d'orientation (en fonction de l'orientation de la montre dans le champ gravitationnel). L'orientation de la montre dans le champ gravitationnel est aussi appelée position de la montre. On peut alors parler d'anisochronisme de position.
Dans une montre mécanique conventionnelle, l'amplitude des oscillations est susceptible de varier, en particulier parce que :
- le couple fourni par le ressort de barillet n'est pas constant ; en se déchargeant le ressort fourni un couple moindre ;
- l'orientation (position) de la montre varie lors du porté. Les frottements liés au pivotement du résonateur sont plus importants en position verticale qu'en position horizontale, l'amplitude est donc plus faible.
Ces variations d'amplitude et d'orientation sont susceptibles de modifier la fréquence d'oscillation et donc la marche de la montre, ce qui crée l'anisochronisme de son résonateur. La forme du spiral ainsi que la présence d'une courbe terminale, comme dans le cas des spiraux Breguet, permet de minimiser l'anisochronisme, c'est-à-dire de limiter les variations de marche. A titre de référence, le certificat de chronomètre, fourni par le COSC, atteste que la marche est comprise entre -4 et +6 s/d (pour une montre mécanique homme) selon des critères bien précis incluant l'orientation et la température, conformément à la norme ISO 3159.
Les montres électroniques sont moins sensibles à l'anisochronisme d'amplitude et d'orientation. L'amplitude est généralement constante et l'effet de l'orientation est modéré. La fréquence propre du diapason à quartz dépend de sa position dans le champ gravitationnel. Par exemple, pour un diapason de 2,45 mm de long, la variation de marche est d'environ ±8 ms/d (p. 1116)[6].
Dépendance thermique
Bien que la température soit un des paramètres liés à l'environnement, la dépendance thermique est généralement traitée à part. Seuls quelques matériaux sont susceptibles d'être utilisés pour garantir la stabilité en température d'un résonateur. Il est même parfois nécessaire d'utiliser des systèmes de compensation pour atteindre une précision voulue.
Dans les montres mécaniques
La découverte par Charles Édouard Guillaume des alliages Invar et Élinvar lui a valu le prix Nobel de physique en 1920. Les spiraux des montres actuelles sont encore, pour la plupart, fabriqués dans des alliages proches de l'Élinvar.
La variation de la raideur angulaire du spiral doit compenser la variation d'inertie du balancier:

où
- : variation relative de fréquence
- : Coefficient Thermo-Élastique du spiral (variation relative du module de Young avec la température)
- : coefficient de dilatation du spiral
- : coefficient de dilatation du balancier
- : variation de température





C'est donc en particulier les matériaux avec un faible (d'où le choix du nom "Élinvar" pour "élastique invariable") qui sont susceptibles d'être utilisés pour fabriquer le résonateur. La plupart des matériaux ont un fortement négatif. Avant l'apparition de l'Élinvar, les horlogers utilisaient des balanciers bimétalliques, dont l'inertie diminuait avec la température et qui étaient difficiles à produire et à régler.
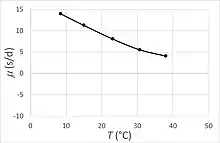
Les montres sont généralement testées entre 8 °C et 38 °C. La norme ISO 3159 tolère un Coefficient Thermique () de ±0.6 (s/d)/°C. Le . Sur la figure ci-dessus, la marche de la montre varie d'environ -10 s/d sur une plage de 30 °C, elle présente un inférieur à 0.6 (s/d)/ °C et remplit donc ce critère du COSC.


Dans les années 2000[7] - [8], le silicium a fait son apparition dans certaines montres mécaniques. Le silicium, lorsqu’il est oxydé en surface, possède un faible . De plus, il a l'avantage d’être insensible aux champs magnétiques.
Dans les pendules
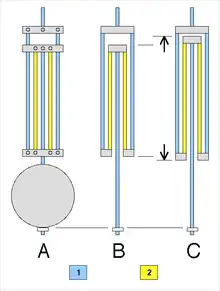
B : longueurs à température normale
C : longueurs à plus haute température.
Dans les pendules, divers systèmes de compensation thermique sont utilisés. Par exemple, en employant des matériaux de faible dilatation de type Invar ou des constructions telles que, malgré la dilatation, la longueur du pendule reste constante.
À la fin des années 1720, Harrisson a utilisé le laiton et l'acier pour fabriquer des pendules qui étaient vraisemblablement les plus précis de l'époque. La longueur de ces pendules ne varie plus avec la température car la dilatation de l'acier (en bleu ci-contre) est inférieure à celle du laiton (en jaune) ; en prenant des barres de longueurs adéquates, la longueur du pendule et donc la fréquence du résonateur restent constantes.
Les pendules Atmos possèdent un résonateur dont le fil de torsion est en Isoval, un alliage de type Élinvar.
Dans les montres électroniques
Les montres à quartz sont moins sensibles aux variations de températures que les montres mécaniques. Leur dépendance thermique est liée aux propriétés du quartz et dépend de la coupe cristalline utilisée pour fabriquer le résonateur.
Bien que faible, la variation de marche en fonction de la température peut être compensée électroniquement. En plaçant un capteur de température suffisamment proche du résonateur, et en connaissant la variation de sa fréquence propre en fonction de la température, il est possible de corriger la marche de la montre, par exemple par inhibition. Dans ces montres, dites thermocompensées, l'anisochronisme thermique devient négligeable. Leur marche annuelle peut atteindre une valeur de l'ordre de ±1 s/an[9] - [10].
Résistance à l'environnement
Les résonateurs horlogers peuvent être sensibles à nombre de paramètres environnementaux et ceci de manière différentiée.
Chocs

Les montres sont soumises à de nombreux chocs lors du porter. Des chocs répétés, même de relativement faibles amplitudes (typiquement 100 g), sont susceptibles de provoquer un retard aux montres mécaniques[11]. Ce décalage est vraisemblablement lié à la magnétostriction des alliages de types Élinvar[12].
La résistance des montres est testée pour différents types de chocs, et en particulier pour des chocs dits "grands", qui correspondent à une chute depuis un mètre sur un sol relativement mou, comme du parquet. Ceci se fait sur un mouton pendule. Le résonateur, que ce soit le balancier-spiral ou le diapason en quartz, doit ressortir indemne de tels chocs.
Plusieurs normes[13] - [14] - [15] définissent les conditions de tests pour déclarer une montre résistante aux chocs.
Magnétisme
Le champ magnétique, qui est de plus en plus important dans notre environnement, peut influencer le résonateur des montres. On distingue deux effets :
- l'effet sous champ (dans le champ, le balancier-spiral ou le moteur Lavet peuvent s'arrêter). La montre va fatalement retarder ;
- l'effet rémanent qui correspond à une modification de marche persistante après la disparition du champ.
C'est ce deuxième aspect qui est le plus critique pour le montres mécaniques et qui nécessite certaines fois de "désaimanter" la montre.
Une norme[16] définit les conditions de tests pour déclarer une montre antimagnétique.
Humidité
L'humidité, qui rentre dans des montres, même dans celles dites étanches (à comprendre par étanches à l'eau), peut modifier la marche d'une montre mécanique, par exemple en rajoutant un film d'eau sur le balancier, ce qui augmente son inertie et diminue sa fréquence.
Le résonateur d'une montre à quartz est encapsulé sous vide, il est donc insensible à l'humidité.
Facteur de qualité
La puissance fournie à un résonateur pour maintenir ses oscillations équivaut à celle qu'il dissipe. Lorsque l'amplitude des oscillations est stable, la dissipation se fait par les diverses sources de frottements, qu'ils soient internes ou externes. Le balancier-spiral frotte dans l'air et il possède des pivots qui frottent contre les pierres des antichocs. Son facteur de qualité est typiquement de 150 à 300 (p. 657)[6]. Le facteur de qualité d'un diapason en quartz est, quant à lui, bien plus élevé (environ 50 000), car le résonateur est encapsulé sous-vide. Il est limité par les frottements internes dans le matériau.
La puissance nécessaire pour faire fonctionner une montre, quelle soit mécanique ou électronique, est de l’ordre de 1 μW, ce qui est remarquable. Le facteur de qualité d'un résonateur à quartz étant bien plus élevé que celui d'un résonateur balancier-spiral, l'entretien du résonateur à quartz nécessite beaucoup moins d'énergie. Dans la montre à quartz, le consommateur principal d'énergie est le système d'affichage (LCD ou moteur Lavet), contrairement à la montre mécanique dont le consommateur principal est l'oscillateur (résonateur et échappement).
Mesure du résonateur
Dans la montre mécanique

Pour déterminer la marche de la montre, il est nécessaire de mesurer la période de l'oscillateur.
Cette mesure peut se faire à l'aide d'un microphone, en écoutant les bruits tic - tac de l'échappement. Si la répétition des tic - tac est trop rapide, la montre avance ; si elle est trop lente, la montre retarde. Le cycle séparant deux bruits consécutifs de l'échappement est appelé alternance acoustique.
La mesure de marche peut aussi se faire à l'aide d'un laser ou d'une caméra. Dans ce cas, on va plutôt déterminer les positions extrêmes (points de rebroussement) du résonateur[19]. Le cycle séparant deux positions extrêmes consécutives du résonateur est appelé alternance (ou alternance optique).
La durée de deux alternances consécutives, qu'elles soient optiques ou acoustiques, correspond toujours à une période d'oscillation.
Si le spiral est complètement détendu (point d'équilibre) lorsque la cheville de plateau est sur la ligne des centres (ligne reliant les axes du balancier et de l'ancre), les bruits de l'échappement apparaîtront de manière très symétrique de chaque côté du point d'équilibre statique et deux alternances acoustiques consécutives auront la même durée : . La montre fait alors :

- - - tic - - - tac - - - tic - - - tac - - - tic - - - tac - - ...
Par contre, si le point d'équilibre apparaît en dehors de la ligne des centres, il y a une alternance acoustique courte suivie d'une alternance acoustique longue. Le temps séparant un tic d'un tac n'est pas le même que celui séparant un tac d'un tic. La montre fait donc :
- - - - tic - tac - - - - - tic - tac - - - - - tic - tac - - - ...
La somme des temps de deux alternances acoustiques consécutives donnera toujours la période de l'oscillateur :
- .

Le défaut de repère est la différence de temps entre deux alternances acoustiques consécutives :
- .

Le défaut de repère n'a pas beaucoup d'influence sur la chronométrie de la montre. Par contre, il peut diminuer la capacité d’auto-démarrage de l'oscillateur (démarrage de l'oscillateur sans aide extérieure lors du remontage du barillet).
Dans la montre électronique
La mesure de la marche d'une montre électronique peut se faire magnétiquement, capacitivement, électriquement ou encore acoustiquement. On pose la montre ou le mouvement sur l'appareil de mesure et le signal émis par le quartz ou le système d'affichage (analogique ou LCD) est analysé pour donner la marche.
Ces appareils de mesure permettent également d'autres mesures comme la consommation de la montre et les caractéristiques de la pile.
Dans le cas où la montre est réglée par inhibition, le quartz a une fréquence délibérément plus élevée que les 32'768 Hz visés. Une mesure capacitive sur le quartz ne fournira pas la marche réelle de la montre. Pour une mesure correcte, il faut capter le signal, soit magnétique provenant du moteur de la montre analogique, soit capacitif de l'affichage LCD, et le temps de mesure doit être un multiple entier de la période d'inhibition (p. 988)[6].
Notes
- Le mot « régulateur » est utilisé en horlogerie pour désigner un système régulant une sonnerie. Il est donc préférable de ne pas l'utiliser pour parler de l'oscillateur horloger.
- Sur cette illustration, le double plateau est inversé par rapport à une configuration classique, typique d'un mouvement montrant le balancier côté cadran.
Références
- Sylvian Aubry, Théorie des échappements, Neuchâtel, Fédération des écoles techniques (FET), , 368 p. (ISBN 978-2-940025-51-0 et 2-940025-51-7)
- Charles-André Reymondin, Georges Monnier, Didier Jeanneret et Umberto Pelaratti, Théorie d'horlogerie, Neuchâtel, Fédération des écoles techniques (FET), (ISBN 978-2-940025-47-3 et 2-940025-47-9)
- « Timing Breakthrough, Si-Time » (consulté le )
- Gaetano Mileti et al., « Recherches sur les horloges atomiques miniatures et optiques », Congrès SSC,
- « About Time » (consulté le ).
- M. Vermot, P. Bovay, D. Prongué, S. Dordor et V. Beux, Traité de construction horlogère, Lausanne, PPUR, , 116 p. (ISBN 978-2-88074-883-8, lire en ligne)
- Jean-Pierre Musy et Frédéric Maier, « Echappement et spiral réalisés en Silinvar », Journée d'Etude SSC,
- « Spiral Silicium, Omega » (consulté le )
- Pascal Lagorgette, « Les calibres NTC: la révolution électronique du mouvement à quartz », Journée d'Etude SSC,
- Morita Shoichiro et Nagase Satoshi, « Development of the solar-powered movement with annual rate of ±1 s », Congrès SSC,
- François Aubert et Patrick Dubois, « Procédures de chocs et effets sur la montre », Journée d’Étude SSC,
- Claude Attinger, « Influence des chocs sur l'aimantation », Congrès SSC,
- NIHS 91-10 : Horlogerie - Montres-bracelet résistant aux chocs, Fédération de l'industrie horlogère suisse
- NIHS 91-20 : Définition de chocs linéaires pour les composants de montres-bracelet, Fédération de l'industrie horlogère suisse
- NIHS 91-30 : Définition des accélérations linéaires rencontrées par une montre-bracelet lors de gestes brusques et de chocs au porter, Fédération de l'industrie horlogère suisse
- NIHS 90-10 : Horlogerie - Montres antimagnétiques, Fédération de l'industrie horlogère suisse
- NIHS 92-20 (ou ISO 22810) : Horlogerie - Montres étanches, Fédération de l'industrie horlogère suisse
- NIHS 92-11 (ou ISO 6425) : Horlogerie - Montres de plongée, Fédération de l'industrie horlogère suisse
- Georges Albert Berner, Dictionnaire professionnel illustré de l'horlogerie, Fédération de l'industrie horlogère suisse, , 1300 p. (lire en ligne)
Articles connexes
Lectures complémentaires
- Charles-André Reymondin, Georges Monnier, Didier Jeanneret et Umberto Pelaratti, Théorie d'horlogerie, Neuchâtel, Fédération des écoles techniques (FET), (ISBN 978-2-940025-47-3 et 2-940025-47-9)
- M. Vermot, P. Bovay, D. Prongué, S. Dordor et V. Beux, Traité de construction horlogère, Lausanne, PPUR, , 1116 p. (ISBN 978-2-88074-883-8, lire en ligne)