Cercle de Mohr
Le cercle de Mohr est une représentation graphique des états de contrainte à deux dimensions, proposée par Christian Otto Mohr en 1882.
Dans un graphique où l'axe horizontal représente l'amplitude de la contrainte normale et l'axe vertical représente l'amplitude de la contrainte de cisaillement, le cercle de Mohr est le lieu des états de contrainte en un point P lorsque le plan de coupe tourne autour du point P. Il s'agit d'un cercle centré sur l'axe horizontal dont les intersections avec l'axe horizontal correspondent aux deux contraintes principales au point P.
Ce cercle se construit à partir de la connaissance des efforts extérieurs auxquels est soumise la pièce. Il permet de déterminer :
- les directions principales , ainsi que les contraintes principales σI, σII et σIII ;
- la direction pour laquelle on a la cission τ maximale, qui est donc la direction de rupture probable (l'orientation du faciès de rupture), ainsi que la valeur de cette contrainte.

Problématique
Représentation graphique de l'état de contrainte
Le cercle de Mohr est une représentation graphique de l'état de contrainte. Il permet une résolution graphique de la validation à l'état limite ultime, selon le critère de Tresca (cission maximale). C'est donc une méthode rapide et demandant peu de moyens de calcul par rapport au traitement du tenseur des contraintes, mais ayant une précision limitée par le tracé.
Notons que le cercle de Mohr représente l'état de contrainte en un point donné.
Recherche de la cission maximale
La rupture d'un matériau ductile — c'est le cas de la plupart des métaux à température ambiante pour des vitesses de déformation modérées — se fait toujours en cisaillement : l'effort nécessaire pour « arracher » les atomes est beaucoup plus important que celui nécessaire pour faire glisser les atomes les uns sur les autres (voir Déformation plastique). Pour une sollicitation donnée d'une pièce, il faut donc savoir dans quelle section la cission τ (tau) est maximale.

Prenons le cas de la traction simple, ou traction uniaxiale, sur une éprouvette de forme cylindrique. On sait que lors de cet essai, le faciès de rupture va s'amorcer lorsqu'il est orienté à 45° par rapport à l'axe de l'éprouvette. Si l'on considère une section droite de l'éprouvette, celle-ci a une aire S0 ; la force F que l'on applique est normale à cette section, on a donc une contrainte normale σ0 qui vaut:

et un cisaillement nul.
Considérons une section inclinée d'un angle par rapport à la section initiale ; elle a une aire . Si l'on projette la force sur la normale à cette section, on obtient une force normale de module . La contrainte normale σ1 vaut alors:






- .

Si l'on projette sur la section, on obtient une force de module . La cission τ1 vaut alors:


- .

Plus la section est inclinée, plus T est grand, mais plus S est grand. Le rapport τ = T/S présente un maximum pour une section située à 45°, ce qui explique le faciès de rupture.
Si maintenant on trace la courbe paramétrée (σ, τ) lorsque varie, on voit que l'on obtient un cercle de diamètre passant par l'origine, le cercle de Mohr.

Les faciès de rupture sur les essais uniaxiaux (traction ou compression) mettent en évidence cette direction de cission maximale à 45°.
 Rupture en traction d'une éprouvette en aluminium de 8 mm de diamètre, avec plan de rupture à 45°
Rupture en traction d'une éprouvette en aluminium de 8 mm de diamètre, avec plan de rupture à 45° Rupture en traction d'une éprouvette en acier de section rectangulaire 10 mm×3 mm, avec plan de rupture à 45°
Rupture en traction d'une éprouvette en acier de section rectangulaire 10 mm×3 mm, avec plan de rupture à 45° Rupture en compression d'une éprouvette en béton ; le plan de rupture n'est pas à 45°, en raison du frottement intergranulaire
Rupture en compression d'une éprouvette en béton ; le plan de rupture n'est pas à 45°, en raison du frottement intergranulaire
Tracé du cercle pour des contraintes planes
Cas général
Considérons un point P d'un solide ayant un état de contrainte plane. Il s'agit typiquement d'un point de la surface d'une pièce où aucune force extérieure ne s'applique : pas de pression hydrostatique, pas de contact avec une autre pièce (surface libre).
Nous supposons ici que l'on est dans un état de contraintes planes dans le plan (x,y). Le tenseur des contraintes est donc symétrique et de la forme

avec :
- σx : contrainte normale sur la face normale à l'axe x ;
- σy : contrainte normale sur la face normale à l'axe y ;
- τxy = τyx : contrainte de cisaillement sur la face normale à l'axe z.
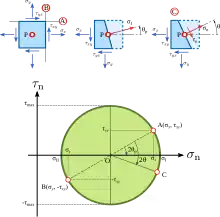
Considérons un vecteur unitaire dans le plan (x,y). La contrainte appliquée en P sur une face perpendiculaire à ce vecteur est . Elle admet une composante colinéaire à et une composante orthogonale à . L'ensemble des couples lorsque tourne dans le plan (x,y) décrit un cercle qui est le cercle de Mohr cherché. Ce cercle admet pour diamètre le segment [AB] où :




- le point A décrit les contraintes sur la face normale à x. Il a pour coordonnées (σx, τxy) ;
- le point B décrit les contraintes sur la face normale à y. Il a pour coordonnées (σy, -τxy).
ce qui permet de le construire facilement. Les propriétés de ce cercle sont les suivantes :
- Le cercle a donc pour centre le milieu de [AB], d'abscisse Cz = (σx + σy )/2. Si A et B ne sont pas sur l'axe horizontal, le centre est à l'intersection de [AB] et de l'axe σn.
- Le rayon du cercle vaut : et ce rayon est égal à la cission maximale τmax.
- Les abscisses des intersections du cercle avec l'axe valent et sont égales aux contraintes principales et .
- Si l'on veut connaître les contraintes relatives à un vecteur faisant un angle θ avec l'axe des x dans le plan (x, y ), il faut prendre les coordonnées du point C situé à un angle -2θ du point A sur le cercle (i.e. l'angle vaut -2θ).
- Si l'on appelle -2θp l'angle que fait l'horizontale avec le point A (i.e. ), la direction première principale est donné par le vecteur qui fait un angle θp avec l'axe des x, la seconde direction principale lui est perpendiculaire. L'axe σn correspond à ces directions principales et l'axe τn représente les directions de cission maximale ; les axes géométriques x et y sont représentés par le diamètre [AB].



























Sollicitation biaxiale
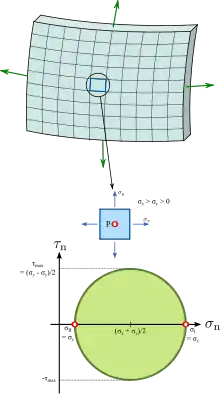
Le cas général se simplifie si les axes x et y du repère sont choisis de façon à être les directions principales du tenseur de contrainte au point P. Dans ce cas, est nul et l'état de contrainte est dit biaxial. Il peut s'agir typiquement d'un point à l'air libre d'un réservoir sous pression, ou bien d'un point d'une tôle soumise à deux couples de forces perpendiculaires dans le plan de la tôle.

Les résultats du paragraphe précédent se simplifient comme suit :
- Le cercle admet pour diamètre les points de coordonnées (σx, 0) et (σy, 0).
- le centre du cercle a pour abscisse (σx + σy)/2 ;
- le rayon du cercle de Mohr, égal à la cission maximale, vaut (σx - σy)/2 (en supposant σx supérieur à σy). Notons que σx ou σy peuvent être négatives.
On remarque que le cercle dans le cas σx = - σy est centré à l'origine, et est identique au cercle obtenu dans le cas d'un cisaillement pur avec une cission nominale égale à σx. L'état mécanique est donc identique, et donc si la matière est isotrope, l'état de la matière est identique, seule change l'orientation.
Sollicitation uniaxiale
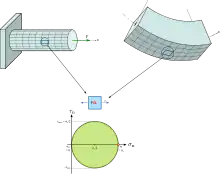

Si et , on obtient un état de contrainte uniaxiale. Il s'agit typiquement :


- de tout point d'une pièce rectiligne (poutre) subissant une traction ou une compression dans l'axe (couple de forces colinéaires égales et opposées) : tirant, bielle, poutre d'un treillis, d'une éprouvette de traction ou de compression ; on appelle x l'axe des forces ;
- de tout point d'une pièce rectiligne en flexion pure (partie centrale d'une flexion 4 points) ; on appelle x l'axe de la pièce ;
- de tout point de la surface supérieure ou inférieure d'une poutre en flexion simple (flexion 3 points).
C'est le cas de l'exemple traité dans le paragraphe Recherche de la cission maximale. On retrouve les résultats donnés au paragraphe précédent, avec :
- Le cercle de Mohr admet pour diamètre les points de coordonnées (0,0) et (σx,0).
- Il est donc tangent à l'axe τn. Il se trouve du côté des σn positif dans le cas de la traction, et du côté des σn négatifs en compression.
- Son centre est au point d'abscisse Cz = σx/2.
- Son rayon, égal au cisaillement maximal, vaut τmax = Rz = σx /2 (ou sa valeur absolue si σx est négatif).
Cisaillement pur
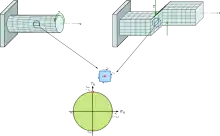
Le cisaillement pur se rencontre lorsque le tenseur de contrainte est tel que σx = σy = 0, et τxy non nul. C'est le cas d'un tube en torsion, ou d'une pièce cisaillée, mais uniquement sur le plan à la fibre neutre (le cisaillement simple s'accompagne d'une légère flexion).
Le cercle de Mohr vérifie alors :
- Son centre est l'origine, Cz = 0.
- La contrainte de cisaillement maximale, égale à son rayon, est également la cission nominale τxy : τmax = Rz = τxy.
- Les directions principales sont les bissectrices du repère (x,y) (droite à 45° dans l'espace réel), avec σI = -σII = τxy.
Tracé du cercle pour des sollicitations triaxiales
Cas simplifié
L'état de contrainte au point P est dit triaxial lorsque le tenseur de contraintes est diagonal, avec des termes diagonaux non nuls. C'est typiquement un point d'un solide soumis à une pression hydrostatique ou lithosatique, et à une traction ou compression. L'essai triaxial est un essai pratiqué sur des sols (géotechnique).
Le tenseur des contraintes est de la forme
- .

et l'on suppose que σx ≥ σy ≥ σz. Si l'on considère une surface de normale , alors le vecteur contraintes vaut


ayant pour composantes :
- la contrainte normale est la composante de selon le vecteur : ;
- la composante tangentielle est obtenue par le théorème de Pythagore : , soit .






Si l'on ajoute le fait que le vecteur est un vecteur unitaire, on a un système de trois équations dont on considèrera que les trois inconnues sont nx2, ny2 et nz2 :

dont le déterminant vaut (Matrice de Vandermonde):

La résolution de ce système (règle de Cramer) donne :

Posons :
- Cx = (σy + σz )/2, Rx = (σy - σz )/2 ;
- Cy = (σx + σz )/2, Ry = (σx - σz )/2 ;
- Cz = (σx + σy )/2, Rz = (σx - σy )/2.
Le système est alors équivalent à :

Compte tenu des signes des dénominateurs (celui de la deuxième équation est négatif alors que les deux autres sont positifs), et du fait que les membres des équations sont des carrés positifs ou nuls, on en déduit les trois inéquations :

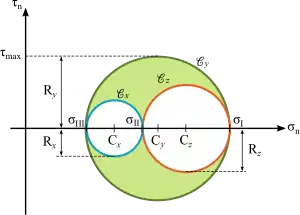
Dans le plan (σ, τ), la représentation des solutions des équations τ2 + (σ - Ci )2 = Ri2 sont des cercles de centre Ci et de rayon Ri . Donc, l'ensemble des valeurs (σ, τ) pour toutes les orientations possibles de est une surface délimitée par trois cercles.
Cette figure est appelée « tricercle de Mohr », à la fois parce qu'il s'agit de trois cercles de Mohr, mais aussi car elle est semblable à l'arbelos, forme étudiée entre autres par l'homonyme Georg Mohr.
Chacun des cercles est le cercle que l'on aurait si l'on se plaçait dans un contexte de contraintes biaxiales, (σy, σz ), (σx, σz ) et (σx, σy ). Pour tracer le tricercle connaissant σx, σy et σz, on se rapporte donc aux cas précédents.
On remarque que tous les cercles sont tangents deux à deux, et que le plus grand cercle est le cercle de rayon Ry, donc correspondant au plan (x, z ). La cission maximale vaut donc
- τmax = Ry = (σx - σz )/2.
Généralisation
L'état de contrainte triaxial est en fait l'état général : si l'on a un tenseur des contraintes dont aucune composante n'est nulle

on sait qu'il existe un repère orthonormé, le repère principal, dans lequel le tenseur est de la forme

ce qui nous ramène au cas précédent.
L'état de contrainte triaxial peut venir d'un chargement complexe, mais aussi tout simplement de la forme de la pièce. Par exemple, une éprouvette entaillée utilisée pour un essai Charpy présente un état de contrainte triaxial en fond d'entaille alors qu'elle n'est soumise qu'à de la flexion.
Cas dégénéré
Considérons le cas où σII = σIII. On a :
- CI = σII, RI = 0 ;
- CII = CIII = (σI + σII)/2 ;
- RII = RIII = (σI - σII)/2.
On voit que le cercle I se réduit à un point, et que les cercles II et III sont confondus. On a donc un seul cercle, identique au cas biaxial.
Si les trois contraintes principales sont égales, ce cercle se réduit à un point.
Autres cercles de Mohr
De manière analogue, on peut tracer :
- un cercle de Mohr des déformations ;
- dans le cadre de la théorie des plaques, un cercle de Mohr des moments.
Cercle de Mohr des déformations
On obtient le cercle de Mohr des déformations en traçant le diagramme (εii , εij)i ≠ j , ou si l'on préfère utiliser l'écart à l'angle droit γij , le diagramme (εii , ½γij)i ≠ j .
L'axe horizontal du cercle, ε, représente les directions principales. L'axe vertical, ½γ, représente les directions d'angle de glissement maximal.
Ce cercle de Mohr est très utile en extensométrie, pour dépouiller les résultats donnés par une rosette de jauges de déformation.
Cercle de Mohr des moments
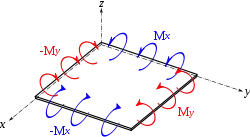
Considérons une plaque mince rectangulaire, subissant deux moments linéiques répartis uniformément: Mx le long de son côté parallèle à l'axe x et My le long de son côté parallèle à l'axe y. Ces moments linéiques ont pour unité le newton (N m/m). Ce sont des moments fléchissants (ils créent une flexion).
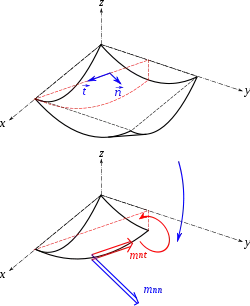
Si l'on fait une coupe selon un plan faisant un angle α autour de l'axe z, on voit que cette face subit un moment fléchissant, qui courbe la face, et un moment de torsion qui l'incline. En écrivant l'équilibre de cette portion de plaque, on voit que le moment s'exerçant sur la face de coupe peut se décomposer en un vecteur moment normal mnn , qui crée la torsion (la section tourne dans le plan), et un vecteur moment tangentiel mnt qui crée la flexion (la plaque se courbe). On se retrouve dans une situation similaire à celle des contraintes normales et tangentielles.
On peut ainsi tracer un diagramme (mnn , mnt ) et l'on obtient un cercle. Les intersections de ce cercle avec l'axe mn donne les sections principales, c'est-à-dire les sections sur lesquelles le moment de torsion est nul.