Le problème de l'approximation s'est posé très tôt en géométrie, pour les fonctions trigonométriques : ce sont des fonctions dont on connaît les propriétés (parité, dérivabilité, valeurs en des points particuliers) mais qui ne s'expriment pas à partir d'opérations réalisables à la main (les quatre opérations). Cela a conduit à la notion de développement en série. On a pu ainsi constituer des tables trigonométriques, puis, avec une démarche similaire, des tables logarithmiques, et de manière générale des tables pour les fonctions couramment utilisées en sciences comme la racine carrée.
Un problème particulièrement intéressant est celui de l'approximation de fonctions par d'autres définies uniquement à partir d'opérations de base d'un ordinateur, comme l'addition et la multiplication, afin de créer des bibliothèques de fonctions mathématiques qui à l'exécution produisent des valeurs les plus proches possibles des valeurs théoriques. C'est ce qui s'appelle l'approximation polynomiale ou rationnelle (c'est-à-dire par des fonctions rationnelles).
L'objectif est de donner une approximation aussi précise que possible d'une fonction réelle donnée, de façon à fournir des valeurs les plus exactes possibles, à la précision près de l'arithmétique en virgule flottante d'un ordinateur. Ce but est atteint en employant un polynôme de degré élevé, et/ou en rapetissant le domaine sur lequel le polynôme doit approcher la fonction. Le rapetissement du domaine peut souvent être effectué, bien que cela nécessite la composition par d'autres fonctions affines, de la fonction à approcher. Les bibliothèques mathématiques modernes réduisent souvent le domaine en le divisant en de multiples minuscules segments et emploient un polynôme de bas degré sur chaque segment.
Une fois le domaine et le degré du polynôme choisis, le polynôme lui-même est choisi de façon à minimiser l'erreur dans le pire des cas. Autrement dit, si f est la fonction réelle et P le polynôme devant approcher f, il faut minimiser la borne supérieure de la fonction sur le domaine. Pour une fonction « convenable », un polynôme optimum de degré N est caractérisé par une courbe d'erreur dont la valeur oscille entre +ε et -ε et qui change de signe N + 1 fois, donnant une erreur dans les pires cas de ε.
Il est possible de construire des fonctions f pour lesquelles cette propriété ne tient pas, mais dans la pratique elle est généralement vraie.
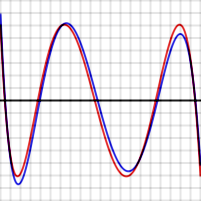
Erreur entre le polynôme optimal de degré 4 et le logarithme népérienln (en rouge), et entre l'approximation de Tchebychev de ln (en bleu) sur l'intervalle [2, 4]. Le pas vertical est de 10−5. L'erreur maximale pour le polynôme optimal est de 6,07 × 10−5.
Erreur entre le polynôme optimal de degré 4 et l'exponentiellee (en rouge), et entre l'approximation de Tchebychev et exp (en bleu) sur l'intervalle [−1, 1]. Le pas vertical est de 10−4. L'erreur maximale pour le polynôme optimal est de 5,47 × 10−4.
Dans chaque cas, le nombre d'extrema est de N + 2 c'est-à-dire 6. Deux des extrema sont les extrémités du segment. Les courbes en rouge, pour le polynôme optimal, sont de « niveau » c'est-à-dire qu'elles oscillent entre +ε et -ε exactement. Si un polynôme de degré N mène à une fonction d'erreur qui oscille entre les extrema N + 2 fois, alors ce polynôme est optimal.
Approximation par des polynômes
Énoncé
Soit f une fonction continue sur un intervalle réel fermé [a , b]. Soit P un polynôme de degré n.
On note l'erreur d'approximation entre P et f.
S'il existe et tels que
,
alors P est un polynôme d'approximation optimal de f parmi les polynômes de degré inférieur ou égal à n au sens de la norme sup sur [a , b] :
Démonstration
Commençons par le montrer sur un graphique. Posons . Supposons que soit un polynôme de degré possédant les propriétés ci-dessus, dans le sens que oscille entre extrema de signes alternés, de à .
La fonction erreur pourrait ressembler au graphique rouge :
L'erreur pour le polynôme de niveau est représentée en rouge, et l'erreur pour le prétendu meilleur polynôme est représentée en bleu.
atteint extrema (dont deux se trouvent aux extrémités), qui ont la même grandeur en valeur absolue situés dans 6 intervalles sur le graphique ci-dessus.
Soit à présent , un polynôme d'approximation de degré optimal. Cela signifie que les extrema de sa fonction erreur doivent tous avoir en valeur absolue une valeur strictement plus petite que , de sorte qu'ils sont localisés strictement à l'intérieur du graphique d'erreur pour .
La fonction erreur pour pourrait avoir une représentation graphique ressemblant au graphique bleu ci-dessus. Cela signifie que doit osciller entre des nombres non nuls strictement positifs et strictement négatifs, un nombre total de fois. Mais est égale à qui est un polynôme de degré . Il doit avoir au moins les racines situées entre différents points en lesquels la fonction polynomiale prend des valeurs non nulles. Or, dans un anneau intègre, un polynôme non nul de degré ne peut avoir plus de racines. Donc est identiquement nul, c'est-à-dire que .
Approximation de Tchebychev
Il est possible d'obtenir des polynômes très proches d'un polynôme optimal en développant une fonction donnée avec des polynômes de Tchebychev puis en coupant le développement à un certain degré. Ce procédé est semblable au développement en séries de Fourier d'une fonction, en analyse de Fourier, mais en utilisant les polynômes de Tchebychev au lieu des fonctions trigonométriques habituelles.
On calcule les coefficients dans le développement de Tchebychev d'une fonction f :
dont on ne garde que les N premiers termes de la série, ce qui donne un polynôme de degré N approchant la fonction f.
La raison pour laquelle ce polynôme est presque optimal est que, pour des fonctions admettant un développement en série entière, dont la série a une convergence rapide, l'erreur commise sur le développement au bout de N termes est approximativement égale au terme suivant immédiatement la coupure. C'est-à-dire que, le premier terme juste après la coupure domine la somme de toutes les termes suivants appelée reste de la série. Ce résultat subsiste si le développement se fait avec des polynômes de Tchebychev. Si un développement de Tchebychev est interrompu après TN, alors l'erreur sera proche du terme en TN + 1. Les polynômes de Tchebychev possèdent la propriété d'avoir une courbe représentative « au niveau », oscillant entre +1 et −1 dans l'intervalle [−1, 1]. Tn + 1 a n + 2extrema. Cela signifie que l'erreur entre f et son approximation de Tchebychev jusqu'à un terme en Tn est une fonction ayant n + 2 extrema, dont les maxima (respectivement les minima) sont égaux, et est ainsi proche du polynôme optimal de degré n.
Dans les exemples graphiques ci-dessus, on peut voir que la fonction d'erreur représentée en bleu est parfois meilleure (lorsqu'elle reste en dessous) que la fonction représentée en rouge, mais plus mauvaise sur certains intervalles, ce qui signifie que ce n'est pas tout à fait le polynôme optimal. Cette différence est relativement moins importante pour la fonction exponentielle, dont la série entière est très rapidement convergente, que pour la fonction logarithme.
Systèmes de Tchebychev
Cette partie et les suivantes reposent principalement sur les ouvrages de Cheney[1] et de Powell[2].
Il est possible de généraliser la caractérisation de «meilleure approximation» avec des espaces de fonctions d'approximations qui ne sont pas des polynômes mais des fonctions standard. Cependant, de telles familles de fonctions se doivent d'avoir certaines bonnes propriétés qu'ont les polynômes. On parle alors de « polynômes généralisés ». Ces « polynômes » auront pour monômes des fonctions de base (que l'on considère agréables) qui satisfont les conditions de Haar.
Conditions de Haar
Une famille de fonctions d'un intervalle dans satisfait les conditions de Haar si et seulement si
Toutes les fonctions sont continues.
Les fonctions satisfont les conditions équivalentes suivantes :
Pour tous distincts
Pour tous distincts, pour tous , il existe un unique tuple tel que la fonction satisfasse
Les fonctions sont linéairement indépendantes et est l'unique fonction de la forme ayant strictement plus racines
Une famille finie de fonctions satisfaisant les conditions de Haar est appelée un système de Tchebychev. Bien évidemment les monômes de degré échelonnés forment un système de Tchebychev : les polynômes sont continus, la condition 2.1 est le déterminant de Vandermonde, la condition 2.2 est la caractérisation du polynôme d'interpolation et la condition 2.3 est le fait qu'un polynôme de degré fixé ne peut avoir plus de racine qui son degré.
On peut aussi dire d'un sous-espace vectoriel de de dimension satisfait les conditions de Haar si et seulement si ses bases sont des systèmes de Tchebychev.
Équivalence des caractérisations
La démonstration de l'équivalence des points 2.1, 2.2 et 2.3 se fera par implications circulaires.
2.1 ⇒ 2.2 Considérons distincts et . Par l'hypothèse 2.1, on remarque en particulier que la matrice
7
est inversible. Il existe donc une unique solution à l'équation Or, cette dernière équation est équivalente à . Il vient ainsi l'existence et l'unicité d'un tuple tel que la interpole les yi en les xi.
2.2 ⇒ 2.3 La fonction nulle a clairement strictement plus de n - 1 racines entre a et b, car elle en a une infinité. Soit maintenant ayant n racines distinctes, notées . La fonction nulle et f coïncident en ces points. Par la propriété 2.2, on a donc f = 0. Cela entraîne de plus que les gi sont linéairement indépendantes sinon on aurait duplicité de l'écriture de la fonction nulle, ce qui est interdit par l'hypothèse 2.2.
2.3 ⇒ 2.1 Soient distincts. Supposons que la matrice ne soit pas inversible. Alors ses colonnes sont linéairement dépendantes et donc il existe tels que . Alors sont racines de qui est donc nulle par la propriété 2.3. Toujours par cette propriété, il suit par indépendance des gi que ce qui est absurde. La matrice est donc inversible et son déterminant est donc non nul.
Exemples
On peut citer deux exemples de systèmes de Tchebychev :
Si sont deux-à-deux distincts alors forme un système de Tchebychev sur pour tout intervalle compact de .
Si sont deux-à-deux distincts et positifs alors forme un système de Tchebychev sur pour intervalle compact de .
Théorème d'alternance
Les systèmes de Tchebychev permettent de caractériser les meilleures approximations de fonctions continues étant des polynômes généralisés construites à partir des fonctions du-dit système.
Énoncé
Soit un système de Tchebychev. Soit une fonction continue. Soient un polynôme généralisé sur le système de Tchebychev et l'erreur d'approximation. Alors est une meilleure approximation uniforme de , c'est-à-dire , ssi il existe tels que et
Remarque
Il est intéressant de noter que si le système de Tchebychev considéré est la base canonique de alors cet énoncé est exactement celui du théorème dans le cas des polynômes.
Démonstration du théorème d'alternance
Théorème de caractérisation
La première chose à faire est de caractériser les meilleures approximations par des polynômes généralisés. On peut commencer par montrer qu'il suffit que l'origine de l'espace soit dans une certaine enveloppe convexe. Pour un système de Tchebychev, On note .
Soit un système de Tchebychev. Soit une fonction continue. Soient un polynôme généralisé sur le système de Tchebychev et l'erreur d'approximation. Alors r est de norme minimale si et seulement si 0 est dans l'enveloppe convexe de .
Démonstration
Condition suffisante
Procédons par contraposée et supposons que ne soit pas minimale. Alors il est possible de trouver un polynôme généralisé satisfaisant une meilleure erreur d'approximation. Autrement dit, il existe tels que .
Posons . Alors pour tout nous avons
En passant les membres de l'inégalité au carré,
Puis, par développement
et
Il s'agit donc maintenant de montrer que 0 n'est pas dans l'enveloppe convexe de , qui est un sous-ensemble de , et nous aurons alors démontré la contraposée. Supposons donc le contraire. Il existe et tels que et . Alors
Ceci est bien entendu absurde, CQFD.
Condition nécessaire
On procède également par contraposition. Supposons donc que 0 n'est pas dans l'enveloppe convexe C de l'ensemble . C est fermé car c'est une enveloppe convexe. Il est borné car 'est. En effet r et les gi sont continues et X est contenu dans un intervalle borné. C est donc fermé borné en dimension fini (contenu dans ), il est donc compact. Ainsi atteint un minimum sur C, disons en . En particulier . Soit quelconque et soit . Par convexité, . Puis
Pour suffisamment petit, cette inégalité est violée si . Donc . Donc pour tout , . X est un fermé contenu dans C, il est donc aussi compact. Par continuité de r et des gi, admet un minimum, . Par ce que nous venons de faire, . Notons . On va alors chercher tel que , ce qui conclura. Posons maintenant . Par définition, . Comme pour les autres, Y est encore compact. Soit donc R le maximum de |r| sur Y. On a alors sinon si satisfait le maximum alors , ce qui est absurde. Alors, si ,
Si maintenant alors
Alors pour , on a
Ainsi, , et n'est donc pas minimale.
Lemme d'alternance
Il vient un lien entre le fait que 0 soit dans une enveloppe convexe et qu'il y ait l'alternance de signe.
Soit un système de Tchebychev. Soient et des constantes non . Alors 0 est dans l'enveloppe convexe de si et seulement si pour nous avons .
Démonstration du lemme
Posons pour commencer pour le déterminant
.
Nous allons montrer que ces déterminants sont tous strictement positifs ou tous strictement négatifs. Pour commencer, ils sont non nuls car le système satisfait les conditions de Haar. Supposons sont que pour et nous ayons
. Alors par le théorème des valeurs intermédiaires appliqué à , on a l'existence de tel que , ce qui est impossible par les conditions de Haar. Ainsi, tous ces déterminants ont le même signe.
Dès lors, 0 est dans l'enveloppe convexe des si et seulement si il existe tels que et . Si alors . Or par les conditions de Haar, les forment une base de l'espace et donc tous les sont nuls, ce qui n'est pas car leur somme vaut 1. Donc . De même, pour tout i, . En particulier, . En résolvant ce système linéaire par les règles de Cramer, on a
Puis,
Les déterminants sont tous du même signe, les sont strictement positifs. Donc , c'est-à-dire que les alternent en signe, ou encore que pour tout , (car ils sont non nuls).
Démonstration du théorème d'alternance
Nous allons maintenant utiliser le théorème et le lemme précédemment démontrés pour prouver le théorème d'alternance. Nous prenons les notations de l'énoncé.
Nous avons que p* est la meilleure approximation de f pour la norme uniforme si et seulement si r* est de norme uniforme minimale. Par le théorème de caractérisation, cela est vrai si et seulement si 0 est dans l'enveloppe convexe des . Il existe donc et avec tels que , ceci viole les conditions de Haar si k < n. Donc nous avons . Quitte à ré-indicer, on prend les dans l'ordre croissant . Par les conditions de Haar, comme dans le lemme, les sont tous non nuls. On applique donc le lemme et l'alternance de signe. Comme les sont positifs, ce sont les qui alternent de signe. Ceci conclut donc la preuve.
Unicité de la meilleure approximation
Jusqu'ici, nous avons caractérisé ce qu'est une meilleure approximation. Nous allons maintenant montrer que la meilleure approximation existe et est unique.
Énoncé
Soit un système de Tchebychev. Soit une fonction continue. Alors il existe une unique meilleure approximation de dans .
Démonstration
Commençons par l'unicité. Supposons donc que et sont des meilleures approximations pour . Nous avons donc que et cette norme est minimale. Or nous avons alors . Donc est encore une meilleure approximation. Soient donnés par le théorème d'alternance pour . Supposons que . Alors au moins l'un des deux ne vaut pas , disons quitte à renommer , et donc . On a
. Ceci est absurde. Donc . Donc à zéros distincts. Donc par les conditions de Haar, nous obtenons qu'elle est identiquement nulle et donc que . Nous avons donc l'unicité.
Procédons maintenant à la démonstration de l'existence. Considérons . Cet ensemble est clairement fermé et borné. Il est non vide puisque la fonction nulle est dans et est de dimension finie. Donc est compact. Ainsi étant continue sur , elle y atteint un minimum, disons en . Or, si est la meilleure approximation de alors par inégalité triangulaire. Donc . Donc est bien une meilleure approximation pour .








![{\displaystyle P=\operatorname {arg} \min _{Q\in \mathbb {R} _{n}[X]}\|f-S\|_{\infty ,[a,b]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fc42108601969b42cc9327f4a365fbe96c1dd20a)

















![[a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)



![{\displaystyle x_{1},\dots ,x_{n}\in [a,b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/47879bae04cbba0cfb552632efc8a65098f343c6)








![{\displaystyle g_{1},\dots ,g_{n}\in {\mathcal {C}}([a,b])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f5cb7cb7b312af9f10c698b2cd5bc91ea5e1bfd)


![{\displaystyle {\mathcal {C}}([a,b])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/afec6a1e08664565a40e2a5a43f32ba251507ba9)












![{\displaystyle \{g_{1},\dots ,g_{n}\}\subseteq {\mathcal {C}}([a,b])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b2d996e27142679dbe6c67931a48dfe82d05a758)
![{\displaystyle f\in {\mathcal {C}}([a,b])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b334e1898c4854b89ad0f18ddfbc0456301e66d0)








![{\displaystyle \mathbb {R} _{n-1}[X]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f34bef053af381b12aa110b822c6f7b187d6894c)







![{\displaystyle X=\{x\in [a,b]\ |\ |r(x)|=\|r\|_{\infty }\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d3018fb5a89f27f9d1dd37a4614da55f0ed41dec)








![{\displaystyle a_{1},\dots a_{n}\in [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/317743cc1b63b9b79dc8e6905d567d630265261e)








![\lambda \in [0,1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/010c0ee88963a09590dd07393d288edd83786b91)












![{\displaystyle Y=\left\{x\in [a,b]]\ |\ \langle {d,r(x){\hat {x}}}\rangle \leq {\frac {\epsilon }{2}}\right\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90c839c54ac6ccc76572351d243225002548b78d)






















![{\displaystyle \alpha _{0},\dots ,\alpha _{n}\in [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4aaa0a3a9f55e0f8231b28e1e98b9d187109bbeb)













![{\displaystyle \alpha _{0},\dots \alpha _{k}\in [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ba7aaa9d7ceb0a2410e07eaf3fdd0368efaf7053)
























