Mouvement à la Poinsot
En mécanique du solide, on appelle mouvement à la Poinsot, le mouvement d'un solide autour de son centre de gravité G, le moment des forces extérieures par rapport à G étant nul. Ce mouvement est caractérisé par la conservation du moment cinétique et de l'énergie cinétique de rotation , demi-produit scalaire du moment cinétique et du vecteur de rotation instantanée. Il existe 3 cas :


- le solide est à symétrie sphérique. Ses moments principaux d'inertie sont égaux : A = B = C. Alors le mouvement se réduit à une simple rotation uniforme d'axe le moment cinétique.
- le solide est à symétrie de révolution : A = B et C est différent. On parle de mouvement d'Euler-Poinsot de la toupie. Ce mouvement est équivalent à celui d'un cône roulant sans glissement sur un autre cône fixe. Le mouvement de la Terre en est un exemple.
- le solide est quelconque : C > B > A. Le mouvement est intégrable grâce aux fonctions elliptiques de Jacobi. Il se répète régulièrement après une certaine variation de la précession.
Solide à symétrie sphérique
Pour un tel solide, tous les moments principaux d'inertie sont égaux. Notons I leur valeur commune. Si est le vecteur de rotation instantanée et le moment cinétique du solide, on a . étant constant, il en est de même de . Le mouvement est un simple mouvement de rotation uniforme d'axe le moment cinétique, à la vitesse angulaire . Son énergie cinétique de rotation est .




Solide à symétrie de révolution
Soit un solide de révolution, d'axes principaux d'inertie , , , de moments d'inertie respectifs (A, A, C). Le référentiel (G, , , ) sera dit référentiel lié au solide. Le référentiel d'origine G et dont les axes sont parallèles à un référentiel galiléen sera dit référentiel fixe. On rappelle que le moment cinétique est constant. On peut le supposer colinéaire au vecteur du référentiel fixe. On dispose des résultats suivants :




Théorème d'Euler[1] - [2] - [3] :
- Les vecteurs , et sont coplanaires.
- l'angle de nutation entre et est constant.
- Le vecteur de rotation instantanée a un module constant.
- Le vecteur décrit un cône d'axe dans le référentiel lié au solide, dit cône du solide.
- Le vecteur décrit un cône d'axe dans le référentiel fixe, dit cône de base.
- Le cône du solide roule sans glissement le long du cône de base. À chaque instant, la génératrice commune aux deux cônes est dirigée par .
- La vitesse angulaire de précession est constante : .
- La vitesse angulaire de rotation propre est constante : .
























En général, le mouvement n'est pas périodique dans le référentiel fixe car les vitesses angulaires de la précession et de la rotation propre ne sont pas commensurables.
Exemple de la Terre
En première approximation, la Terre a un moment cinétique constant et sa forme est essentiellement celle d'un solide à symétrie de révolution de forme ellipsoïdale, avec . S'il s'agissait d'un ellipsoïde homogène, on aurait , où a est le rayon équatorial et c le rayon d'un méridien. Mais la Terre est plus dense au centre. Le mouvement de précession libre calculé précédemment est de période 305 jours sidéraux. Le mouvement de rotation propre est d'un jour sidéral, soit 86 164,1 s. L'angle de nutation est très faible. Au pôle Nord, la polhodie est un cercle d'environ 10 m : le vecteur rotation et le moment cinétique sont presque alignés. Ce mouvement est actuellement suivi par l'IERS, qui observe des écarts entre la réalité expérimentale et le théorème d'Euler. Les raisons en sont multiples :


- En premier lieu, la Terre n'est pas un solide, mais c'est un corps doté d'une certaine élasticité, et dont la rigidité est voisine de celle de l'acier. Newcomb et Chandler reprirent la théorie d'Euler en tenant compte de ce fait, et trouva que le mouvement de précession d'Euler devait être changé en un mouvement de précession de 432 jours[2].
- Par ailleurs, la Terre se comporte comme un matériau doué de viscosité ; le rebond glaciaire relève le bouclier canadien, entraînant une dérive de la polhodie.
- De plus, le mouvement des océans (courants et marées) et le mouvement de l'atmosphère perturbe la polhodie (voir rotation de la Terre).
- Il existe des tremblements de Terre (voir effet Sumatra), des mouvements de convection profonde correspondant à la tectonique des plaques, un noyau dont une partie est liquide et agité de mouvements de convection importants (voir géomagnétisme terrestre). À moment cinétique quasi constant, cela correspond à une rotation légèrement irrégulière, parfaitement perceptible compte tenu de la précision actuelle (10-10).
La modélisation précédente ne tient pas compte de la précession des équinoxes, décrite par Hipparque en 200 av. J.-C. : à long terme, le moment cinétique de la Terre n'est pas constant en raison de l'action de la Lune et du Soleil sur le bourrelet équatorial. Il subit donc par effet gyroscopique une précession, bien plus lente que la précession libre du mouvement à la Poinsot.
Solide quelconque
Ce cas, dit de la toupie asymétrique, concerne le mouvement d'un objet quelconque, sans symétrie particulière, et est bien plus compliqué. En effet, dans ce mouvement, les trois angles d'Euler (nutation, précession et rotation propre) varient tous les trois.
Mise en équation
On se place dans le référentiel lié au solide (G, , , ), les axes étant des axes principaux d'inertie, les moments d'inertie étant respectivement A, B et C. On supposera par exemple que C > B > A. Notons les composantes du vecteur de rotation instantanée . Les composantes du moment cinétique sont . Selon les règles de dérivation dans une composition des mouvements, la conservation du moment cinétique dans le référentiel fixe s'exprime à partir de ses composantes dans le référentiel lié au solide sous la forme :



ce qui donne les équations d'Euler suivantes[4] :

Résolution dans le référentiel lié au solide
En utilisant la constance du module du moment cinétique et de l'énergie cinétique de rotation, on a également :


On détermine alors l'expression de en fonction du temps t de la façon suivante. Les deux équations ci-dessus permettent d'exprimer et en fonction de et des constantes et . On reporte ces expressions de et dans la deuxième équation d'Euler, permettant d'obtenir une équation différentielle non linéaire en , à variables séparables. Celle-ci s'exprime simplement si on utilise les variables auxiliaires suivantes[4] :






On obtient alors . En choisissant l'origine des temps lorsque prend une valeur nulle, cette équation différentielle s'intègre sous la forme :


qui est l'intégrale elliptique de première espèce . On exprime s en fonction de τ, et donc en fonction du temps t en prenant la réciproque de cette fonction, ce qui conduit à , où sn est l'une des fonctions elliptiques de Jacobi (les autres étant cn et dn). On en déduit ensuite et . Les expressions finales sont[5] :





Ces fonctions sont périodiques de période avec . Ainsi, dans le référentiel lié au solide, le vecteur de rotation instantanée a une variation périodique.


Résolution dans le référentiel fixe
On remonte ensuite à l'expression des angles d'Euler en fonction du temps, en prenant la direction du référentiel fixe dans la direction du vecteur , puis en exprimant dans le référentiel lié au solide en fonction des angles de nutation θ et de rotation propre φ. On obtient ainsi :


On en déduit[6] :


Quant à la précession , on l'obtient par l'expression des composantes du vecteur de rotation instantanée selon les vecteurs et en fonction des angles d'Euler, et qui valent respectivement et . On en déduit :




est une primitive de la fonction ainsi trouvée. Au bout d'une période T donnée au paragraphe précédent, la précession a tourné d'un certain angle et le mouvement se répète relativement à cet angle, mais il n'y a pas de raison que cet angle soit commensurable à un tour complet, de sorte que le mouvement dans le référentiel fixe n'est pas en général périodique.
Polhodie et herpolodie
Poinsot a décrit le mouvement géométriquement comme suit :
Dans le référentiel lié au solide, soit (E1) l'ellipsoïde d'inertie, d'équation , et soit (E2) l'ellipsoïde d'équation .


En raison des deux équations (conservation de l 'énergie cinétique de rotation) et (conservation du module du moment cinétique), le vecteur décrit la courbe intersection de ces deux ellipsoïdes. Cette courbe s'appelle polhodie du mouvement.

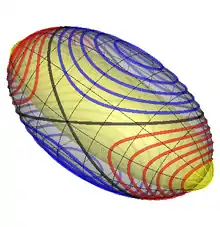
Si l'on trace sur l'ellipsoïde d'inertie les diverses polhodies pour des valeurs différentes de LG, on constate qu'elles se répartissent en quatre zones. Toujours avec la convention C > B > A, deux zones sont constituées des polhodies (en bleu sur la figure ci-contre) qui entoure l'axe GZ correspondant au moment cinétique C le plus élevé. Deux autres zones sont constituées des polhodies (en rouge sur la figure ci-contre) qui entoure l'axe GX correspondant au moment cinétique A le plus faible. Ces polhodies sont fermées et l'on retrouve ainsi le fait que le vecteur de rotation instantanée se déplace périodiquement dans le référentiel lié au solide. Les quatre zones précédentes sont limitées par deux courbes séparatrices se coupant selon l'axe intermédiaire Y. Cette configuration s'interprète mécaniquement par le fait qu'un mouvement de rotation proche des axes GZ et GX sera stable (et plus stable selon GZ que selon GX), alors qu'il sera instable autour de l'axe intermédiaire GY. À titre d'exemple, il est possible de faire tourner une boîte d'allumettes autour l'axe perpendiculaire aux deux grandes faces de la boîte, qui est le plus stable (ce que chacun sait également, quand il effectue des ricochets sur l'eau avec des pierres plates) ; il l'est également (mais avec plus de difficulté) autour de son grand axe. Mais il n'y a aucun espoir de lancer la boîte d'allumettes selon l'axe perpendiculaire aux grattoirs : c'est bien une position du mouvement stationnaire, mais elle est instable (effet Djanibekov).
Considérons maintenant le plan (P) tangent à l'ellipsoïde d'inertie au point . La normale à (P) est dirigée par le gradient de la fonction en ce point, à savoir , qui, à un facteur près, n'est autre que le moment cinétique . L'équation du plan tangent est donc :



Comme , cette équation se simplifie en :


et étant constant, il s'agit d'un plan qui reste fixe pendant le mouvement. Le point de contact entre ce plan et l'ellipsoïde d'inertie appartenant à l'axe de rotation instantanée, sa vitesse instantanée est nulle, ce qui signifie que l'ellipsoïde d'inertie roule et pivote sans glissement sur le plan fixe (P)[7]. La trace du point de contact dans le plan (P) s'appelle herpolhodie (on peut démontrer par ailleurs que cette courbe est sans point d'inflexion).
Notes et références
- Landau 1994, p. 164-165
- J.-P. Pérez, Mécanique, fondements et applications, Paris/Milan/Barcelone, Masson, , 678 p. (ISBN 2-225-82916-0), p. 380-382
- Bruhat 1967, p. 209
- Landau 1994, p. 176.
- Landau 1994, p. 180
- Landau 1994, p. 181
- Bruhat 1967, p. 207-208
Voir aussi
Bibliographie
- G. Bruhat, Cours de physique générale, mécanique, Masson & Cie,
- L. Landau et E. Lifchitz, Physique théorique, mécanique, Ellipses,
- Louis Poinsot, Théorie nouvelle de la rotation des corps, Bachelier, Paris,
Articles connexes
Liens externes
- Michèle Audin, « Intégrable ou pas », dont une autre version est : Michèle Audin, « Les caprices du satellite », Pour la Science, no 317, (lire en ligne)