Mouvement de Lagrange de la toupie
Le mouvement de Lagrange de la toupie est le mouvement d'une toupie pesante autour d'un point de son axe, la réaction du support en ce point ayant un moment nul (rotule parfaite).
C'est à peu près le mouvement d'une toupie ordinaire, à ceci près que dans une toupie, sa pointe est ronde et glisse en frottant sur le plan où elle « repose » : il s'ensuit par application du théorème du couple gyroscopique qu'elle se redresse et vient en position de toupie dormante (i.e. en rotation stable autour d'un axe vertical).
Si la rotation propre de la toupie est très rapide, on observe un mouvement de précession avec une vitesse angulaire constante directement proportionnelle au poids, ce qu'on vérifie expérimentalement avec une balance gyroscopique, l'angle de nutation étant constant. Il convient d'étudier d'abord ce cas plus facile, avant d'aborder le cas général, pour lequel la nutation oscille entre deux valeurs, la précession ayant une vitesse variable.
Approximation gyroscopique
Notations
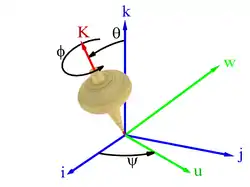
On note :
- O le point fixe de l'axe de la toupie lui servant de support,
- G le centre d'inertie de la toupie,
- un référentiel galiléen considéré comme fixe, étant dirigé selon la verticale,
- un référentiel mobile lié à la toupie, étant dirigé selon l'axe de la toupie,
- l'angle entre et (angle de nutation),
- le vecteur unitaire directement orthogonal au couple (, ). L'angle entre et est l'angle de précession. Soit le vecteur unitaire directement orthogonal au couple (, ),
- l'angle entre et . est l'angle de rotation propre,
- g l'accélération de la pesanteur, m la masse de la toupie, a la distance entre O et le centre d'inertie de la toupie.











Les angles , , sont les angles d'Euler.
Mise en équation
Le vecteur de rotation instantanée de la toupie par rapport au référentiel fixe est :

Compte tenu des propriétés de symétrie axiale de la toupie, notons A, A, C les moments d'inertie de la toupie, calculés en O, par rapport aux axes ou aux axes . Le moment cinétique de la toupie par rapport au point O est :


Le poids de la toupie et la réaction du sol en O exercent un couple .

Le théorème du moment cinétique en O s'écrit :

Supposons que l'axe de la toupie ne soit pas vertical. On se place dans le référentiel intermédiaire . Le vecteur de rotation instantanée du référentiel intermédiaire par rapport au référentiel fixe est : , Le théorème du moment cinétique exprimé dans le référentiel intermédiaire est :



ce qui donne le système[1] :

La troisième équation exprime que est une constante , ce qui signifie que la composante du moment cinétique selon est constante. Dès lors, la deuxième équation devient :



et, si on la multiplie par , le membre de droite devient la dérivée de , quantité qui est donc également constante, égale à la composante du moment cinétique selon .



Résolution approchée
On se place dans le cadre de l'approximation gyroscopique quand la vitesse angulaire est grande devant les autres vitesses angulaires. Dans ce cas, l'égalité s'approxime en , et l'égalité s'approxime en . Cette dernière égalité signifie en particulier que est constant. La première équation devient alors qu'on approxime en .







Il en résulte que :
- La vitesse angulaire de rotation propre est constante, égale à .
- L'angle de nutation est constant
- La vitesse angulaire de précession est constante, égale à .


On peut remarquer que et sont parallèles, puisque et . L'équation du mouvement s'écrit donc aussi :






Plus généralement, tout système physique vérifiant une équation du type , avec constant non nul, sera tel que le vecteur subira un mouvement de précession autour de l'axe dirigé par , ce dernier étant précisément égal au vecteur vitesse angulaire de précession. En effet, est orthogonal à , donc le module L de ce vecteur est constant. Et est orthogonal au vecteur constant , donc la composante de le long de ce vecteur est également constante. Les deux conditions précédentes entraînent que décrit un cône d'axe . Il n'est pas difficile alors de vérifier que la vitesse de précession est celle annoncée.



Un exemple de tel phénomène est donné par la précession de Larmor, affectant le moment cinétique d'un dipôle magnétique ayant la propriété que son moment magnétique est proportionnel au champ magnétique dans lequel il est plongé (c'est le cas de nombreuses particules)[2]. Notons ce coefficient de proportionnalité. Le moment cinétique vérifie alors une équation du type . Si ce champ magnétique est constant, alors exécute un mouvement de précession d'axe , avec une vitesse angulaire de précession égale à .




Précession des équinoxes

L'étude précédente s'applique également au phénomène de précession des équinoxes, en remplaçant le moment du poids exercé par la toupie par le couple exercé par le Soleil et la Lune sur le bourrelet équatorial de la Terre. En première approximation, l'expression théorique de la vitesse angulaire de précession est[4] :

où l'on utilise les distances moyennes et de la Terre au Soleil et à la Lune. et sont les masses du Soleil et de la Lune, G la constante de la gravitation universelle, C et A les moments d'inerties de la Terre par rapport à l'axe polaire et à un axe équatorial, l'inclinaison de l'axe terrestre sur l'écliptique, et la vitesse de rotation de la Terre sur elle-même. La contribution de la Lune est de l'ordre du double de celle du Soleil (soit environ 16"/an pour le Soleil et 34"/an pour la Lune).




Pour un ellipsoïde homogène de demi-axe polaire a et de demi-axe équatorial b, le quotient vaut , mais cette modélisation de la Terre trop simpliste ne permet pas d'en déduire la valeur précise de la période de précession. À l'inverse, la détermination de cette période par des observations astronomiques permet d'en déduire la valeur de , soit environ 1/306.


Hipparque donna une bonne estimation de la vitesse angulaire de précession. Il ne savait pas mesurer la position du point vernal avec la précision de 1" d'arc, mais il disposait des mesures antérieures vieilles de 2 siècles, soit 10 000" d'arc, ce qui suffisait.
Le pôle céleste n'est pas éternellement voisin de l'étoile polaire. En 26 000 ans, il décrit dans le ciel un cercle autour du point Q, de direction perpendiculaire à l'écliptique, point Q situé environ au milieu de la constellation du Dragon : le cercle de 23°26' de rayon est très large et emmènera dans 13 000 ans le pôle en limite de la constellation d'Hercule et de la Lyre[5] : alors du point de vue climat, l'hémisphère nord recevra cette fois un peu plus de chaleur que l'hémisphère sud (~ 7 %), ce qui est important dans la théorie de Milanković du climat (il faut y rajouter la variation périodique d'excentricité et la variation périodique d'inclinaison (stabilisée par l'existence de la Lune). On obtient ainsi une remarquable concordance avec les cycles glaciaires de l'holocène.
Cas général
Résolution
Nous avons vu que les équations du mouvement étaient :

où et sont des constantes. La deuxième équation permet d'exprimer en fonction de . Si on reporte cette expression dans la première équation, on obtient une équation différentielle non linéaire du second ordre en , en général insoluble formellement, mais dont on peut vérifier qu'une intégrale première n'est autre que l'expression de l'énergie mécanique totale, qui est constante au cours du mouvement s'il n'y a pas de frottement :

Compte tenu des expressions de et données par les deux dernières équations du mouvement, on obtient[6] :

On note généralement cette équation sous la forme :
- avec , quantité appelée énergie potentielle effective.


Cette équation permet de mener une étude qualitative du comportement de la nutation , mais également une résolution approchée dans quelques cas particuliers, obtenus par exemple par linéarisation si les variations de sont petites.
On peut montrer qu'il s'agit d'un mouvement à la Poinsot dans un référentiel bougeant à la Poinsot.
Étude qualitative
Supposons qu'à un instant donné, soit différent de 0 et π, que soit non nul (par exemple strictement positif), et que soit différent de . Dans ce cas, est une fonction croissante du temps. Il est impossible que prenne la valeur π ou même tende vers π car l'énergie potentielle effective tendrait vers , en contradiction avec la constance de l'énergie mécanique. Par conséquent, il y a une valeur maximale que ne peut dépasser. En cette valeur, s'annule. On montre de même qu'il y a une valeur minimale en dessous de laquelle ne peut descendre. Le mouvement de nutation est confiné entre ces deux valeurs. Les valeurs de inférieures à 90° sont dues à l'effet gyroscopique.





Stabilité de la toupie dormante
On appelle toupie dormante le cas d'une toupie en rotation stable autour d'un axe vertical ascendant. On peut déterminer la condition de cette stabilité[7]. Il suffit que l'énergie potentielle effective soit minimale en .

Si la rotation est verticale, on a et l'expression de l'énergie potentielle effective devient :


Un développement limité de l'énergie potentielle effective au voisinage de donne alors :

Il y a minimum en si , ou encore . La stabilité sera d'autant plus grande que la vitesse de rotation sera élevée, le centre d'inertie proche du point O, et le moment d'inertie C élevé devant le moment d'inertie A (toupie en forme de disque plutôt que de sphère).


Précession uniforme
Il y a précession uniforme quand est constante. La deuxième équation du mouvement montre que cela se produit si et seulement si est constant. Dans ce cas, la première équation du mouvement devient :


équation du second degré en . Ainsi, pour une nutation donnée, il y a deux vitesses de précession possibles. Dans la pratique, c'est la plus lente qui est la plus facile à obtenir[8]. Quand augmente, cette précession lente se rapproche de la valeur de la vitesse de précession trouvée plus haut dans le cadre de l'approximation gyroscopique.
Mouvement linéarisé
La linéarisation du mouvement du gyroscope consiste à supposer que des petites variations des angles d'Euler ont lieu à partir d'angles de référence. On effectue alors un développement limité des équations du mouvement en ne gardant que les termes du premier ordre. On obtient ainsi un système différentiel linéaire résoluble.
Comme exemple, on reprend le cas de la précession uniforme avec les approximations suivantes :
- , où est un angle constant de nutation servant de référence,
- , avec Pr l'une des vitesses de précession constante correspondant à la nutation et satisfaisant l'équation du paragraphe précédent. Le dénominateur de X(t) a pour but de simplifier le futur système différentiel, ainsi que l'expression de l'énergie cinétique du gyroscope en fonction de X et Y.




On linéarise les deux premières équations du mouvement :

et on obtient :

Notons , en rad/s, pratiquement égal à pour les vitesses de rotation propre élevée, et qui caractérise un couplage gyroscopique qui conserve l'énergie : celle-ci se transfère de X vers Y et réciproquement.


La première équation devient :

qui s'intègre sous forme d'une oscillation sinusoïdale de pulsation . L'extrémité du gyroscope décrit alors sur une sphère une trochoïde plus ou moins allongée.

Autre exemple : si on linéarise les équations du mouvement avec, comme conditions initiales, une nutation différente de 0 et π, et des vitesses de variation de la nutation et de la précession nulles, alors on obtient un mouvement cycloïdal sur la sphère, les pointes de la cycloïde étant vers le haut.
Voir aussi
Articles connexes
Liens externes
- Michèle Audin, « Intégrable ou pas », dont une autre version est : Michèle Audin, « Les caprices du satellite », Pour la Science, no 317, (lire en ligne)
Bibliographie
- Michèle Audin, Les systèmes hamiltoniens et leur intégrabilité, EDP Sciences, 2001, (ISBN 978-2868835222)
- J.-P. Pérez, Mécanique, fondements et applications, Masson, (ISBN 2-225-82916-0)
Notes et références
- Perez 1997, p. 383
- Perez 1997, p. 393
- (en) J. Vondrák, N. Capitaine et P. Wallace, « New precession expressions, valid for long time intervals », Astronomy & Astrophysics, vol. 534, , A22 (ISSN 0004-6361, DOI 10.1051/0004-6361/201117274, lire en ligne)
- Perez 1997, p. 389
- Pierre Kohler, Le ciel, atlas guide de l'univers, Hachette, , p. 279
- Perez 1997, p. 384
- L. Landau et E. Lifchitz, Physique théorique, Mécanique, Ellipses, , p. 173
- Perez 1997, p. 385