Mars Geyser Hopper
Mars Geyser Hopper est un projet de véhicule d'exploration martienne dont la mission est l'étude des geysers martiens de dioxyde de carbone. Ces phénomènes géologiques n'ont pas d'équivalent sur Terre ; leurs rejets de gaz relativement explosifs apparaissent au printemps de l'hémisphère sud martien, après la période d'obscurité et d'intense froid local, lors des hausses de la température. Ces geysers sont principalement répartis dans la région du quadrangle Planum Australe, autour du pôle sud de Mars. Faute de pouvoir atterrir à si haute latitude, la destination du Mars Geyser Hopper devra être atteinte en deux fois grâce à sa capacité de bondir, par des sauts de plusieurs kilomètres d'allonge.
Conçue et développée dans la continuité notamment de la mission Phoenix, dans la décennie 2000 et le début des années 2010, cette mission n'a en 2023 toujours pas été réalisée, notamment en raison de son coût.
Contexte
Sur le plan technologique, la mission Mars Geyser Hopper est choisie pour tester le principe du générateur Stirling à radioisotope avancé (ASRG) comme source d'énergie. La version qui doit être embarquée a été adaptée aux conditions locales par une équipe de « modélisation collaborative pour l'évaluation paramétrique du système spatial » (Collaborative Modeling for the Parametric Assessment of Space System ou COMPASS[1]).
Ce vaisseau spatial s'inscrit dans le programme Discovery de la NASA, regroupant des missions à budgets plus modestes, inférieurs à 425 millions de dollars, telles que les missions Genesis ou Deep Impact, dont le but est l'exploration du système solaire. Le montant de cette mission devrait être compris entre 350 et 425 millions de dollars[2] - [3], soit entre 300 et 360 millions d'euros environ, hors coût de lancement[2].
Le vaisseau réutilise des technologies de la sonde spatiale Phoenix[2] - [3], notamment pour le vol démonté, l'atterrissage et les fusées réutilisables, afin de réduire les coûts et les risques de l'opération.
La mission est programmée pour une durée de 30 mois depuis le lancement. Cela comprend huit mois de croisière interplanétaire et une année martienne, correspondant à 22 mois terrestres, à la surface de la planète. En cas de besoin, la mission pourrait être rallongée de quelques mois sur place.
Des dates de lancements en 2016, 2018 et 2020 permettaient d'atteindre le pôle sud de la planète tout en évitant les périodes de glaciation[2]. Cependant, le lancement devait initialement respecter la date butoir du et a donc été annoncé pour le [2].
Le début de l'EDL (« entrée-descente-atterissage ») était prévu pour le 8 octobre 2016[2]. Elle aurait été suivie de la préparation du premier saut de l'engin le , qui aurait eu lieu par la suite le [2]. Le second saut de l'appareil était programmé pour le . Enfin, le , les observations auraient pu débuter[2].
À ce jour, la mission n'a toujours pas pu être lancée en raison du coût et de la difficulté d'accessibilité du plutonium 238, élément nécessaire pour l'utilisation de l'ARSG. Ce système de production d'énergie est revu à l'étude à partir de 2018[4], en plus du développement d'un générateur thermoélectrique à radioisotope multi-mission (MMRTG)[5].
Caractéristiques détaillées et capacités
Système de saut et déplacement
Le système doit effectuer deux sauts, l’un pour atteindre la zone à étudier sur Planum Australe, l’autre pour se poser sur le site final d’étude des geysers. Il peut se déplacer au moyen de moteurs monopropulseurs pulsés à hydrazine, laquelle est maintenue sous forme liquide à −75 °C grâce au système thermique[2], conçus pour permettre un redémarrage. Les ingénieurs ont pu estimer les quantités de propergol nécessaires pour ces sauts grâce au programme Mission Analysis and Simulation Tool in Fortran (MASTIF), permettant des modélisations de sauts.
À partir du programme MASTIF, ils ont imposé les conditions de sauts suivantes :
- effectuer une montée verticale de deux secondes ;
- s'orienter à un angle de 35 degrés par rapport à la verticale ;
- suivre une trajectoire balistique ;
- permettre l'orientation du vecteur de poussée pour, au besoin, annuler la vitesse horizontale ;
- permettre une descente verticale pour un atterrissage en douceur et ne pas abîmer la structure de l’engin.
Les données du saut ont été calculées pour une densité atmosphérique constante de 0,017 314 kg/m3[2].
Le tableau ci-dessous présente un résultat de modélisation par le programme MASTIF ; les distances sont des estimations minimales. Il est permis d'espérer que les réserves en propergol seront plus grandes que celles estimées, qu’il en restera davantage lors de l'atterrissage. Ainsi, les opérateurs de la mission auront une plus grande marge. Après l'atterrissage, l’équipe chargée de la mission réévaluera les quantités de propergol restant afin de déterminer la distance que l’engin pourra parcourir.
| premier saut | deuxième saut | |
|---|---|---|
| Distance | 2,0 km | 0,1 km |
| Vitesse | 248 m/s | 60 m/s |
| Masse initiale | 500 kg | 452 kg |
| Masse finale | 452 kg | 440 kg |
| Propergol consumé | 48 kg | 12 kg |
(tableau traduit depuis le texte initial de la NASA[2])
Équipements

Les geysers martiens sont dus à l'emprisonnement de particules de dioxyde de carbone (CO2) lors de l'hiver au sud de Mars, où les températures tombent à −150 °C, soit lorsqu’il n’y a aucune exposition solaire[6].
Le choix premier était de reprendre le modèle utilisé pour Mars Phoenix Lander, qui utilisait le soleil comme source d'énergie. Or la faible exposition solaire de la zone d’étude rend son utilisation seule impossible.
Le système de générateur Stirling à radioisotope avancé (ASRG), tirant son énergie de la désintégration radioactive de plutonium 238, était envisagé comme alternative, fournissant une puissance de 133 W. L'énergie cumulée serait utilisée pour les opérations de surface et les sauts. À son action serait ajoutée une batterie pour les étapes d'entrée-descente-atterrissage et de sauts, fournissant 150 W supplémentaires[2]. La chaleur résiduelle dégagée par l’ASRG (environ 350 W) permettrait à l’engin de résister au froid hivernal et de ne pas être piégé dans la glace[7]. Les deux systèmes pèseraient respectivement 6 kg pour l’équipement du moteur et 126 kg pour la structure du sauteur. Finalement, le système ASRG a été écarté en 2013 à cause de son coût trop important[8].

L’utilisation d’hydrazine dans quinze propulseurs Aerojet MR-107N B, développant 230 secondes d'impulsion spécifique pour l'atterrissage et le saut, permet la propulsion de l’engin et un atterrissage en douceur. Son système de contrôle de réactions possède quatre paires de propulseurs de type Aerojet MR-103D à 215 s d'impulsion spécifique, et un propulseur Aerojet MR-102 à 220 s d'impulsion spécifique. Ce système permet de fournir de petites quantités de poussée dans toutes les directions, ainsi que le contrôle de rotation, ce qui permet une grande maniabilité de l’appareil pour les déplacements sur le terrain. La trémie doit être composée de 62 kg supplémentaires d’hydrazine pour permettre des sauts jusqu’au site de geysers d’environ 2 km ainsi que 191 kg de propergol[2].
Plusieurs types d'instruments scientifiques ont été inclus sur le Hopper[2], tels qu’une caméra stéréo permettant l’observation des phénomènes de geyser[9], ou un bras robotique pour creuser la surface du sol martien afin d’effectuer des prélèvements d’échantillons et leurs analyses par le Hopper.

L'engin possède un système de détection de lumière et un instrument de télémétrie (lidar) qui a pour but d’évaluer les distances à l’aide d’un laser, d’un scanner et d’un récepteur GPS, notamment utilisé en cartographie car il permet d’obtenir une précision très élevée des environnements naturels[2] - [10]. Une caméra d'atterrissage et un spectromètre thermique servent aux études géologiques à distance et à l'étude des conditions météorologiques. Tout le matériel d’étude de terrain a été estimé à 34 kg[2].
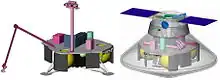
L'atterrisseur a été calqué sur le modèle de Mars Phoenix. Il sera composé de panneaux solaires en couple, de trois axes d’entrée balistique, de capteurs solaires, d’une centrale à inertie (IMU), d’un radar d'atterrissage et d’un système de viseur d'étoiles. Pour l'atterrisseur, le poids atteint les 25 kg, ce qui est contrasté par la masse des structures et mécanismes s’élevant à 402 kg[2].
Le Hopper possède 100 Go de capacité de stockage de données, deux unités d'acquisition de données, deux ordinateurs de vol à l'intérieur qui sont estimés à une trentaine de kilogrammes[2].
Détails de la mission
La conception de Mars Geyser Hopper s'appuie sur le système hérité de l'atterrisseur Mars Phoenix, mais utilise un seul ASRG comme source d'énergie, plutôt que deux panneaux solaires[11]. L'ASRG a subi des tests de qualifications spatiale et de durée de vie à la NASA[12]. Cependant, le projet a été abandonné. L'appareil possède différents instruments de mesures et de détection, afin de creuser sous la surface du sol et de recueillir des échantillons de sol pour les faire analyser[11]. Il possède également un instrument de télémétrie (lidar) (permettant de mesurer la distance d'un objet visé) ainsi qu'une caméra d'atterrissage et un spectromètre thermique (pour l'analyse géologique à distance et la détection météorologique)[11].
Le site d'atterrissage est choisi au niveau du pôle sud car c'est une région où des geysers apparaissent sur plusieurs centaines de kilomètres, selon des densités de plus en plus importantes[13].
La durée entière de la mission à partir du lancement est de 30 mois, dont huit mois de voyage jusqu'à la planète Mars. Les 22 mois restant sont consacrés à la mission principale, qui est l'observation de geysers sur un site précisément, qui aura été choisi par les scientifiques à l'aide des données transmises. Si la mission principale est un succès et qu'il reste suffisamment de réserve de propergol à bord, une deuxième manœuvre doit être envisagée pour l'étude d'un deuxième site du pôle sud polaire[13] - [11].
Chronologie du déroulement de la mission

- Mars Geyser Hopper entre dans l'atmosphère au niveau du pôle sud de Mars, pendant l'été là où la glace est la moins présente en surface. L'appareil réalise un atterrissage en douceur à l'aide d'une fusée propulsée. L'atterrissage est ciblé au niveau d'une région à proximité d'un geyser et non sur le geyser lui-même, son rayon d'atterrissage mesurant 20 km sur 50 km[11].
- L'été polaire favorise les recherches géologiques de surface. De plus, les images prises pendant la descente ainsi que les images de surface vont permettre au satellite d'identifier précisément le lieu de l'atterrissage avec un emplacement à proximité d'un geyser[11] - [13].
- Le vaisseau sera en mesure d'effectuer un premier saut d'une distance allant jusqu'à 2 km, dans le but de rapprocher suffisamment l'appareil du site de prélèvement et de l'endroit où il restera pendant la période hivernale.
- À la suite de son saut, il commence à effectuer ses recherches géologiques afin de caractériser un site de geyser[13].
- Le deuxième saut est quant à lui d'une plus courte distance (environ 100 m). Ce saut lui permettra d'accéder au site d'hivernage, un endroit choisi en altitude où il pourra avoir une vue des environs et être suffisamment en dehors de la zone de retombée du panache de débris attendu[13].
- Pendant l'été, il caractérisera la zone avant de passer en "mode hiver". Durant cette période, il continuera à transmettre des données géologiques et météorologiques[13].
- À l'arrivée du printemps, l'appareil observe les phénomènes de geyser depuis la position choisie pour une observation optimale. La mission principale est terminée une fois les geysers observés. La décision d'un prolongement de la mission pour une année entière martienne pourrait être prise, jusqu'au prochain été polaire[11].
Calendrier initial de la mission scientifique
- Début de la mission , croisière d'une durée d'environ sept mois. Une fois proche de l'orbite de Mars, correction de la trajectoire.
- Fin octobre 2016, opération de manœuvre d'entrée, qui permet l'orientation pour la décente aérodynamique. Initiation de l'état d'entrée avec une séparation de la partie du vaisseau qui a servi à la croisière[13].
- Début de la descente, chauffage des pointes et déploiement des parachutes environ 3 minutes après la descente. Largage du bouclier thermique et déploiement des jambes en plus de l'activation du radar[13].
- Il y a séparation de l'atterrissage et du début du virage par gravité. Une fois l'atterrissage effectué, l'étape de dépoussiérage commence 15 min après le débarquement, suivie d'une reconfiguration selon les besoins ; déploiement de l'antenne, établissement des communications et transmission de l'état de santé de l'appareil[13].
- Une fois le vaisseau en place, commence alors la caractérisation initiale du site qui aura une durée d'environ 107 jours. Le but étant la sélection du site pour les opérations scientifiques d'été[13].
- Le premier saut vers le site scientifique d'été est programmé pour le 23 janvier 2017 et d'une durée de 60 jours. Une reconfiguration est à réalisée si nécessaire. Observation de la région locale et transmission des informations en plus du traitement des données, afin de déterminer le prochain site scientifique "ajusté" (si nécessaire et si le carburant le permet)[13].
- Le deuxième saut est un saut d'ajustement. Une fois effectué avec une reconfiguration, début des observations scientifiques et d'archives des données récoltées. Les observations hivernales au pôle sud ont une durée de 376 jours, pendant lesquels le robot effectue des observations météorologiques et climatiques[13].
- Après le dégel printanier, début de la conservation, des acquisitions et du relai des données, afin de détecter les geysers. Fin de la mission principale autour du , probabilité de prolongement de la mission[13].
Notes et références
- (en) Melissa L. McGuire, Steven R. Oleson, Timothy R. Sarver-Verhey, « Concurrent Mission and Systems Design at NASA Glenn Research Center : The Origins of the COMPASS Team » [PDF], sur ntrs.nasa.gov, NASA, (consulté le ).
- (en) Geoffrey A. Landis, Steven J. Oleson and Melissa McGuire, « Design Study for a Mars Geyser Hopper », sur ntrs.nasa.gov, (consulté le ).
- (en) Bruce Dorminey, « NASA May Go Mars Geyser Hopping », sur Forbes, (consulté le ).
- (en) Edward J. Lewandowski, Michael W. Dobbs et Salvatore M. Oriti, « Advanced Stirling Radioisotope Generator Engineering Unit 2 Anomaly Investigation », sur ntrs.nasa.gov, (consulté le ).
- (en) Dan Leone, « Lockheed Shrinking ASRG Team as Closeout Work Begins », sur Spacenews.com, (consulté le ).
- (en) Hugh H. Kieffer, Philip R. Christensen et Timothy N. Titus, « CO2 jets formed by sublimation beneath translucent slab ice in Mars' seasonal south polar ice cap », Nature, vol. 442, no 7104, , p. 793–796 (ISSN 1476-4687, DOI 10.1038/nature04945, lire en ligne, consulté le ).
- « https://www.termogamma.net/fr/solutions-2/recuperation-de-la-chaleur/ »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?).
- (en) « Future Planetary Exploration: The ASRG Cancellation in Context », sur Future Planetary Exploration, (consulté le ).
- MastCam.
- (en-US) « What is LIDAR », sur National Oceanic and Atmospheric Administration, US Department of Commerce (consulté le ).
- D. Munjal, P. L. Chawla, J. J. Lokich et N. Zamcheck, « Carcinoembryonic antigen and phosphohexose isomerase, gammaglutamyl transpeptidase and lactate dehydorgenase levels in patients with and without liver metastases », Cancer, vol. 37, no 4, 1976-04-xx, p. 1800–1807 (ISSN 0008-543X, PMID 4219, DOI 10.1002/1097-0142(197604)37:43.0.co;2-k, lire en ligne, consulté le ).
- Louise M. Richards, « NASA Technical Reports Server (NTRS)2008364NASA Technical Reports Server (NTRS) », Reference Reviews, vol. 22, no 8, , p. 40–41 (ISSN 0950-4125, DOI 10.1108/09504120810914619).
- Geoffrey Landis, Steven Oleson et Melissa McGuire, « Design Study for a Mars Geyser Hopper », 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, American Institute of Aeronautics and Astronautics, (ISBN 978-1-60086-936-5, DOI 10.2514/6.2012-631).