Critère de Nyquist
Le critère de stabilité de Nyquist est une règle graphique utilisée en automatique et en théorie de la stabilité, qui permet de déterminer si un système dynamique est stable. Il a été formulé indépendamment par deux électrotechniciens : l'Allemand Felix Strecker de Siemens en 1930[1] - [2] - [3] - [4] et l'Américain Harry Nyquist des Laboratoires Bell[5] en 1932. Cette construction, qui exploite le diagramme de Nyquist des circuits à boucle ouverte, permet de se dispenser du calcul des pôles et des zéros des fonctions de transfert (bien qu'il faille connaître le nombre et le type des singularités du demi-plan réel). Elle s'applique à des circuits dont la fonction de transfert n'est pas nécessairement une fonction rationnelle, comme les boucles à retard. Contrairement au diagramme de Bode, il permet de travailler sur des fonctions de transferts à singularités réelles. En outre, il se généralise de façon naturelle aux systèmes multiplexés type « entrées multiples, sorties multiples », courants en avionique.

Le critère de Nyquist est très largement employé en électronique et en régulation, sans préjudice d'autres domaines, pour la conception et l'étude des circuits à contre-réaction. Quoique le critère de Nyquist soit l'un des critères de stabilité les plus généraux, il ne s'applique qu'aux circuits linéaires stationnaires (LTI). Pour les circuits non linéaires, il faut recourir à des critères plus complexes comme ceux de Liapounov ou du disque de stabilité. Malgré son caractère graphique, le critère de Nyquist ne suggère rien de concret sur le caractère stable ou instable d'un circuit : il n'indique pas comment modifier un circuit pour le rendre stable. De ce point de vue, des techniques moins générales comme le diagramme de Bode sont parfois plus utiles pour les concepteurs.
Le diagramme de Nyquist
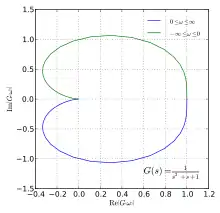
Un diagramme de Nyquist est la courbe paramétrique de la réponse fréquentielle d'un circuit automatique. La principale utilisation des diagrammes de Nyquist est l'étude de la stabilité d'un système à contre-réaction. En coordonnées cartésiennes, la partie réelle de la fonction de transfert détermine l'abscisse d'un point de fonctionnement ; sa partie imaginaire, l'ordonnée. La courbe est paramétrée par la fréquence ce qui donne un diagramme fréquentiel. On peut tracer la même courbe en coordonnées polaires[6] : le gain de la fonction de transfert est alors la coordonnée radiale, et l'angle donne sa phase.
On étudie la stabilité d'une boucle à contre-réaction négative en appliquant le critère de stabilité de Nyquist au diagramme de Nyquist du circuit en boucle ouverte (c’est-à-dire privé de la boucle de contre-réaction). Cette méthode est d'emploi élémentaire, même pour les lignes de délai ou d’autres fonctions de transfert non rationnelles, qu'il serait délicat d'analyser par d’autres méthodes. Ici, on juge de la stabilité en comptant simplement le nombre de cycles de la courbe autour du point (−1,0) ; et on détermine l'intervalle de gain au-delà duquel le circuit sera stable en comptant les intersections de la courbe avec l'axe réel.
Le diagramme de Nyquist donne parfois quelques informations sur la forme de la fonction de transfert : par exemple, la différence entre le nombre de zéros et de pôles de la fonction de transfert se déduit de la tangente de la courbe à l'origine[7].
Pour les épures manuelles, on a longtemps utilisé des papiers millimétrés spéciaux permettant de juger de la linéarité de la courbe, avec une anamorphose des coordonnées pour exagérer les zones critiques du diagramme. Lorsque l'on fait le tracé par ordinateur, il faut bien veiller à incorporer au tracé toutes les fréquences auxquelles travaillera le circuit. Cela exige souvent de travailler en coordonnées logarithmiques, étant donné les écarts entre fréquences.
Principe de la démarche
"Considérons un système dynamique, ou circuit, de fonction de transfert en boucle ouverte ; inséré dans un circuit à contre-réaction négative , la fonction de transfert de l'ensemble sera . On peut se prononcer sur la stabilité en examinant les racines du polynôme du dénominateur , par exemple à l'aide du tableau de Routh, bien que cette méthode soit fastidieuse. On peut également conclure en traçant le diagramme de Bode de la fonction de transfert en boucle ouverte , ou, comme nous allons le faire à présent, en traçant la courbe en coordonnées polaires du produit de fonctions et en utilisant le critère de Nyquist.





La transformée de Laplace de la fonction de transfert peut s'écrire comme un rapport de deux polynômes:


Les racines de sont appelés les zéros de , et celles de sont appelées pôles de . L’équation est appelée l’« équation caractéristique. »



On détermine la stabilité d'un circuit de fonction de transfert par la valeur de ses pôles : pour qu'elle soit stable, il faut que la partie réelle de chaque pôle soit négative. Si le circuit est obtenu en bouclant un composant de fonction de transfert par une contre-réaction négative unitaire, les racines de l’« équation caractéristique » sont aussi les zéros de , ou celles de .



Application d'une idée de Cauchy
On sait par la théorie des fonctions holomorphes, qu'on peut transformer un contour du plan complexe , entourant un nombre quelconque de singularités (zéros et pôles) de la fonction , sur un plan image (dit plan ) par une fonction holomorphe . En particulier, chaque affixe du contour a pour image le point d'affixe et l'ensemble définit un contour-image.




D'après le principe de l'argument de Cauchy[6] - [8], le diagramme de Nyquist de , représenté par le contour décrit cycles autour du point du plan transformé , avec . Ici, et sont, respectivement, le numbre de zéros de et le nombre de pôles de contenus à l'intérieur du contour . Notez que l'on compte ici les cycles dans le plan-image selon le même sens que celui du contour et que les cycles décrits dans l'autre sens doivent être déduits (comptés en négatif) ; autrement dit, on considère les cycles décrits dans le sens des aiguilles d'une montre comme positifs, les autres comme négatifs.







À vrai dire, l'article original[5] d’Harry Nyquist (1932) utilisait une approche moins sophistiquée que le principe de l'argument de Cauchy. L'approche suivie ici est voisine de celle de Leroy MacColl (Fundamental theory of servomechanisms, 1945) ou d’Hendrik Bode (Network analysis and feedback amplifier design 1945), deux chercheurs des Laboratoires Bell ; c'est celle de la plupart des manuels d'automatique.
Énoncé du critère de Nyquist
Il faut d'abord définir le contour de Nyquist, contour qui contient le demi-plan complexe positif (de droite) ; il est composé (en notant j l'un des deux complexes tels que ) :

- d'un segment recouvrant l'axe , de à .
- d'un demi-cercle de rayon , partant de et orienté dans le sens des aiguilles d'une montre vers le point d'affixe .




Le contour de Nyquist, transformé par la fonction , décrit la courbe de dans le plan complexe. D'après le principe de l'argument, le nombre de cycles décrits dans le sens des aiguilles d'une montre autour de l'origine n'est autre que le nombre de zéros de du demi-plan positif, moins le nombre de pôles de de ce même demi-plan. Si, au contraire, on transforme le contour par la fonction de transfert en boucle ouverte , on obtient le diagramme de Nyquist de . En comptant les cycles de ce contour autour de -1, on obtient la différence entre le nombre de pôles et le nombre de zéros compris dans le demi-plan positif de .

Compte tenu que les zéros de sont les pôles du système en boucle fermée, et que les pôles de sont les pôles de , nous énonçons le critère de Nyquist :
« Étant donné un contour de Nyquist , soit le nombre de pôles de intérieurs à , et le nombre de zéros de intérieurs à . Si est le nombre de pôles du système en boucle fermée dans le demi-plan positif, et le nombre de pôles de la fonction de transfert en boucle ouverte situés dans le demi-plan positif, le contour image dans le plan , décrira cycles (dans le sens des aiguilles d'une montre) autour du point . »


Si le système est déjà instable en boucle ouverte, il faut le stabiliser par une boucle de contre-réaction. L'instabilité se traduit par l'existence de pôles dans le demi-plan positif (RHP). Pour qu'un système en boucle fermée soit stable, il faut qu'il n'y ait pas de racines dans le demi-plan positif des s. Donc, le nombre de cycles décrits dans le sens inverse des aiguilles d'une montre autour du point doit être égal au nombre de pôles en boucle ouverte dans ce même demi-plan. Tout cycle décrit par la réponse fréquentielle en boucle ouverte (en allant des basses fréquences vers les hautes fréquences) autour du point critique signale que le système serait instable avec la boucle de contre-réaction[9].

Cas de circuits à pôles imaginaires
Le raisonnement ci-dessus partait de l'hypothèse que la fonction de transfert en boucle ouverte ne possède aucun pôle sur l'axe des imaginaires (c'est-à-dire aucun pôle de la forme ). En effet, l'application du principe de l'argument suppose que le contour ne passe par aucun pôle de l'application conforme. Or certains systèmes dérogent à cette condition : les plus courants sont les circuits intégrateurs (pôles en zéro[10]).

Pour étudier les systèmes à pôles sur l'axe des imaginaires, on peut modifier le contour de Nyquist pour éviter le point : il suffit pour cela de considérer un arc semi-circulaire de rayon entourant , issu de et aboutissant (dans le sens des aiguilles d'une montre) au point . Ce la revient à modifier le circuit de telle façon que sa fonction de transfert décrive un arc de rayon infini, où est la multiplicité du pôle sur l'axe des imaginaires.





« Pour qu'un système linéaire en boucle fermée soit stable, il faut et il suffit que le rayon vecteur tendu entre le point d'affixe -1 et le point courant du graphe de la fonction de transfert du système linéaire en boucle ouverte subisse un déphasage exactement égal à où est la multiplicité du pôle sur l'axe des imaginaires. »


Justification mathématique

Il s'agit ici de déterminer la stabilité de la fonction de transfert d'un système à contre-réaction de gain k, donnée par

Autrement dit, nous cherchons à établir si l'équation caractéristique de la fonction de transfert ci-dessus, donnée par

possède des zéros hors du demi-plan de gauche (couramment abrégé OLHP).
Supposons le contour, dûment échancré pour éviter les zéros et pôles de , orienté dans le sens des aiguilles d'une montre (ou anti-trigonométrique) enfermant le demi-plan de droite. Le principe de l'argument de Cauchy énonce que

où représente le nombre de zéros de intérieurs au contour et , le numbre de pôles de sur le même contour. En réarrangeant le termes, nous avons , c'est-à-dire


Or possède exactement les mêmes pôles que . Nous pouvons donc trouver en comptant les pôles de intérieurs au contour, ou au demi-plan réel (de droite, ORHP).

Nous transformons à présent l’intégrale ci-dessus par un changement de variable. Posant , nous avons


Effectuons un second changement de variable : . Cela donne


Mais on voit que est l'image du contour par , et ce n'est donc rien d'autre que le diagramme de Nyquist. L'intégrale donnant N peut se simplifier en appliquant la formule intégrale de Cauchy :


En fait, cette intégrale correspond exactement au nombre de cycles décrits dans le sens des aiguilles d'une montre par le diagramme de Nyquist autour du point . On peut donc écrire :

![{\displaystyle {\begin{aligned}Z={}&N+P\\[6pt]={}&{\text{(nombre de cycles décrits dans le sens des aiguilles d'une montre par le diagramme de Nyquist autour du point }}{-1/k}\\&{}+{\text{(nombre de pôles de }}G(s){\text{ dans le demi-plan positif)}}\end{aligned}}}](https://img.franco.wiki/i/6fb0bdbd7eb856b0ceedcb8f9b1cf803b90ec60f.svg)
On trouve ainsi que la fonction de transfert définie ci-dessus correspond à une boucle de contre-réaction (unitaire) stable si , tel qu'on l'a calculé ci-dessus, est égal à 0.

Pour résumer...
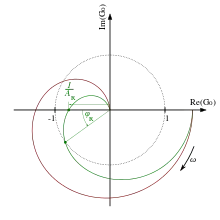
ligne rouge: instable
ligne verte: stable sous réserve d'amplitude et de phase.
Le critère de Nyquist permet de juger d'après les propriétés d'un système en boucle ouverte de la stabilité du système en boucle fermée.
- Si la fonction de transfert en boucle ouverte possède un pôle nul de multiplicité , alors le diagramme de Nyquist est discontinu en . Il faut supposer que le circuit de déphasage décrit fois un demi-cercle de rayon infini dans le sens des aiguilles d'une montre. En appliquant cette règle, on peut négliger les pôles nuls ; autrement dit, s'il n'y a pas d'autres pôles instable, la fonction de transfert en boucle ouverte doit être regardée comme stable.
- Si la fonction de transfert en boucle ouverte est stable, alors le système en boucle fermée est instable pour tout cycle autour du point −1.
- Si la fonction de transfert en boucle ouverte est instable, alors il doit y avoir un cycle de sens inverse des aiguilles d'une montre autour de −1 pour chaque pôle de dans le demi-plan positif.
- Le nombre des cycles excédentaires (N + P positif) est le nombre de pôles instables du système en boucle fermée.
- Toutefois, si la courbe intercepte le point d'affixe -1, il est difficile d'affirmer quoi que ce soit sur la stabilité du système, et la seule conclusion que l'on puisse tirer du diagramme est qu'il y a des zéros sur l'axe .

Notes
- Florent Chavand, Des données à l’information: De l’invention de l’écriture à l’explosion numérique, Londres, ISTE Editions, (ISBN 9781784052683), p. 242
- (de) Kurt Reinschke, Lineare Regelungs- und Steuerungstheorie, Springer-Verlag, (réimpr. 2) (ISBN 978-3-64240960-8), « 4.3. Das Stabilitätskriterium von Strecker-Nyquist », p. 184
- Christopher Bissell, « Inventing the ‘black box’: mathematics as a neglected enabling technology in the history of communications engineering »,
- (de) Felix Strecker, Die elektrische Selbsterregung mit einer Theorie der aktiven Netzwerke, Stuttgart, S. Hirzel Verlag, .
- Harry Nyquist, « Regeneration Theory », Bell System Technical Journal, vol. 11, no 1, , p. 126–147 (DOI 10.1002/j.1538-7305.1932.tb02344.x, lire en ligne)
- Cf. J.-Ph. Pérez, Chr. Lagoute, J.-Y. Fourniols et St. Bouhours, Électronique. Fondements et applications, Paris, Dunod, (réimpr. 2012, 2e) (ISBN 9782100581153), « 13. Rétroaction. Application aux asservissements », p. 441-443
- Cf. par exemple Nageotte, « Analyse et correction des systèmes linéaires », sur Université de Strasbourg - Automatique, vision et robotique (consulté le ), p. 106
- Cf. Y. Granjon, Automatique : Systèmes linéaires, non linéaires,à temps continu,à temps discret,représentation d'état, Dunod, (réimpr. 2e, 2010) (ISBN 978-2-10-055087-6), « 6.3 Critère de Nyquist », p. 108
- Non seulement masquer les pôles du demi-plan positif par les zéros du numérateur ne supprime pas l'instabilité, mais même rendra le système instable avec contre-réaction, puisque les racines en boucle fermée transitent entre les pôles et les zéros avec contre-réaction. En fait, les zéros du numérateur rendent indétectables les pôles instables, donc non stabilisables par contreréaction.
- M. Meerov, Y. Mikhaïlov et V Friedman (trad. V. Polonski), Principes de la commande optimale, Moscou, Éditions Mir, , p. 88
Voir également
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Nyquist stability criterion » (voir la liste des auteurs).
- Stabilité EBSB
- Diagramme de Bode
- critère de Routh–Hurwitz
- Diagramme de Black
- cercles de Hall
- critère de stabilité de Barkhausen
- Applets paramétrables
- EIS Spectrum Analyser - freeware d'analyse et de simulation de spectres d'impédance
- Tracé d'un diagramme de Nyquist avec Geobebra
- PID Nyquist plot shaping - outil interactif gratuit, simulateur de circuit