Contrôle des écoulements
Le contrôle des écoulements est un domaine de la mécanique des fluides qui étudie les possibilités d'action sur les écoulements dans le but de les améliorer relativement à divers objectifs, qu'il s'agisse d'écoulements libres ou d'écoulements au voisinage d'une paroi. Les gains portent généralement sur l'augmentation des performances, avec une réduction du bruit éventuellement, et la réduction de la consommation qui en découlent.
Le contrôle peut porter sur l'ensemble de l'écoulement ou opérer en un point donné avec un effet dans le voisinage et sur l'évolution de l'écoulement. Les contrôles peuvent être constants, se produisant sans intervention et en toutes circonstances ou adaptatif, en fonction de paramètres observés au moyen de diverses techniques.
Historique
Exemples naturels
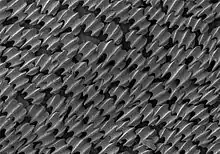
Un exemple de contrôle d'écoulement dans la nature est la peau de requin. En effet, cette peau possède des micro-rainures permettant de modifier l'écoulement de l'eau autour du requin. En diminuant la vitesse contre la peau du requin, cela diminue les frottements de l'eau, permettant à cet animal de se déplacer à des vitesses de l'ordre de la centaine de km/h[1]. Cet effet est connu sous le nom d'"effet riblet".
.jpg.webp)
Un autre exemple est celui qui a inspiré les winglets sur les aéronefs. Certains volatiles comme les rapaces ou les cigognes ont la capacité de modifier la géométrie de leurs ailes, particulièrement en bout d'aile. Cela permet de diminuer le cisaillement à cet endroit, et ainsi diminuer les turbulences et les vortex de leurs sillages, néfastes à leurs performances.
Premiers procédés

Le plus ancien cas de contrôle d'écoulement est le perfectionnement de la balle de golf, inventée dans les années 1880, bien avant que Prandlt n'introduise la notion de couche limite. Il avait été observé que les aspérités permettait à la balle de parcourir une plus grande distance. La physique de l'interaction balle-fluide n'a été formulée que plusieurs années plus tard : les aspérités forcent la transition laminaire/turbulent, réduisant la traînée de pression[2] (voir la crise de traînée de la sphère). La transition à la turbulence a pour effet de renforcer la couche limite et de retarder son décollement, diminuant ainsi la taille de la bulle de recirculation et la zone de dépression en aval. La zone de dépression étant plus petite qu'en écoulement laminaire, la force d'aspiration, à l'origine de la traînée de pression, est moins importante.
La notion de la couche limite est apportée en 1904 par Prandlt[3]. Cela lui permet d'expliquer le phénomène de décollement (aussi appelé décrochage) et de proposer, avec Tietjens, l'utilisation de l'aspiration continue pour modifier l'écoulement autour d'un cylindre et recoller le décollement dans un diffuseur[4]. Ils constatent ainsi qu'une perturbation localisée peut agir sur l'ensemble de l'écoulement.
Les applications du contrôle des écoulements commencent dès le début du XXe siècle : d'abord en 1903, avec les Frères Wrigth qui développent un avion couplant un gauchissement des ailes (précurseur des ailerons) et une gouverne de direction pour améliorer l'aérodynamique[5], puis dans les années 1910, avec l'apparition des ailerons qui permettent de contrôler le vol des avions[5].
En 1947, Mc Faden et al. utilisent des générateurs de vortex sur un XB-47 afin de corriger le cabrage dû au décollement sur l'extrados des ailes[6]. En 1955, il utilise ces mêmes dispositifs pour contrôler le décollement sur les ailes d'un F86.
En 1974, l'aérodynamicien américain Richard Whitcomb met au point les premières winglets de l'histoire de l'aviation grâce à ses recherches dans le centre de recherche de la NASA à Langley (États-Unis) publiées en 1976. Cette nouvelle technologie permet alors de réduire la trainée induite par la portance sans pour autant augmenter l'envergure de la voilure.
En parallèle commencent alors à se développer des systèmes d'écoulements actifs, comme le Northrop X-21, avion expérimental développé dans les années 1960 pour le compte de la NASA, dont les ailes sont équipées d'un dispositif permettant d'aspirer une partie de la couche limite et de rendre ainsi laminaire l'écoulement de l'air.
Dans les années 1980, la question de la stabilité des écoulements suscite de nombreux travaux, et Ho et Huerre publient en 1984 la démonstration du contrôle possible des structures cohérentes dans une couche de mélange[7]. À partir de 1990, les capacités de calculs numériques permettent la simulation d'écoulements complexes, et la dynamique de recherche s'oriente vers les procédés de contrôle actif.
Généralités
Avantages
Les performances des véhicules terrestres ou aériens sont effectivement modifiées par l'écoulement de l'air autour d'eux. La traînée, induite par la résistance de l'air au passage du véhicule, est responsable du coût énergétique et polluant des véhicules, et d'autres phénomènes, comme le décrochage pour les avions, peuvent être même dangereux et provoquer des accidents mortels[8] - [9]. En pratique, ces changements favorables se traduisent donc par l'augmentation des performances des appareils (augmentation de la portance pour les aérodynes), la réduction de la consommation (par la réduction de la traînée par exemple) ou encore la réduction du bruit[10].
Formellement, le contrôle des écoulements peut être vu selon trois définitions complémentaires :
- il s'agit de modifier l'état naturel d'un écoulement vers un état désiré[11].
- c'est également une perturbation à petite échelle, dans l'objectif de modifier le comportement de l’écoulement à grande échelle[12].
- et enfin, il peut également être vu comme la production et le maintien d'états particuliers d'un écoulement, en vue d'obtenir un niveau de performance pour un système donné[10].
Ce domaine consiste ainsi en la manipulation des écoulements libres (par exemple des jets ou des sillages) ou à proximité d'une paroi (par exemple une couche limite), en utilisant des dispositifs passifs ou actifs, dans le but d'obtenir des changements favorables au sein de l'écoulement.
Types de contrôles
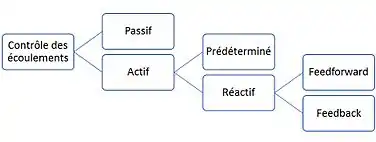
Les stratégies de contrôle sont classés suivant la technique employée. L'ensemble de la communauté scientifique du contrôle des écoulements s'accorde sur la classification exprimée dans le schéma "Classification des stratégies de contrôle des écoulements", inspiré de Gad-El-Hak[10].
Une première distinction dans les stratégies de contrôle se fait entre les systèmes dits « passifs », qui ne requièrent pas d'apport d'énergie extérieure, et les systèmes "actifs" nécessitant une alimentation (fluidique ou électrique). Ensuite, au sein même des stratégies de contrôle actif, une distinction est faite selon que le forçage varie ou non dans le temps. Si le forçage est invariant dans le temps, le système ne requiert pas de capteurs pour connaître l'état de l'écoulement : le contrôle est alors qualifié de prédéterminé ou « en boucle ouverte ». À l'inverse, un algorithme mathématique peut gérer la commande du forçage, et ainsi des capteurs sont nécessaires pour connaître l'état de l'écoulement : il s'agit alors du contrôle "réactif" ou « en boucle fermée ». Par la suite, la boucle de contrôle peut être qualifiée de "feedforward" si elle utilise une mesure du l'état sans contrôle pour adapter la commande ou de "feedback", si elle mesure directement les effets du contrôle sur l'écoulement pour l'adapter.
Contrôles passifs
Les contrôles passifs se font au moyen de dispositifs qui ne nécessitent pas d'apport énergétique. Ils peuvent agir à différentes échelles sur les écoulements.

À grande échelle, il est possible de défléchir l’écoulement grâce à des dispositifs mécaniques macroscopiques, comme les dispositifs hypersustentateurs pour les avions. Ces dispositifs, dont l'origine découlent des travaux de Page (Royaume-Uni) et Lachman (Allemagne), dans les années 1920-1930, augmentent la surface de l'aile, changent sa courbure et parfois aussi l'angle d'attaque, dans le but d'augmenter la portance, dans les phases de vol à basses vitesse[13] - [14]. D'autres dispositifs, comme les winglets situés en bout d'aile, agissent sur les tourbillons marginaux afin de réduire la traînée.
À petite échelle, on trouve les dispositifs qui vont agir sur la couche limite pour modifier la répartition de l’énergie dans l'écoulement, toujours dans l'objectif de modifier l'écoulement de manière bénéfique. On peut alors agir sur le décollement grâce, par exemple, aux vortex generators qui génèrent des tourbillons favorisant le mélange turbulent entre l'écoulement principal et la couche limite. Ce phénomène a pour but d'apporter de l'énergie à la circulation de l'air et ainsi éviter le décrochage.[15].
.jpg.webp)
Enfin à l'échelle microscopique, il est possible de réduire localement le frottement pariétal généré par une couche limite turbulente en modifiant localement la surface, grâce par exemple aux riblets ou parois rainurées. Les riblets sont des surfaces rainurées ou striées dans le sens de l'écoulement. Les rainures modifient la structure de la turbulence en proche paroi[16] et réduisent le frottement local.
Contrôles actifs
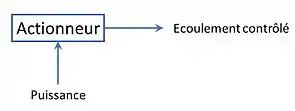
Contrairement au contrôle passif où les systèmes visaient simplement à modifier la dynamique d'un écoulement, dans le contrôle actif d'écoulement il y a un apport d’énergie au système. La méthode consiste à injecter très localement de l’énergie à l'écoulement afin d'avoir l'effet escompté sur la dynamique du système global. La mise en place du contrôle actif nécessite l'utilisation d'actionneurs, mobilisables via une consigne. On distingue le contrôle en "boucle ouverte" quand les actionneurs fonctionnent seuls, et contrôle en "boucle fermée" quand des capteurs sont nécessaires pour connaître l'état de l'écoulement.
On peut prendre l'exemple du système ALA (Aerodinamica Lamborghini Attiva) qui est un système de contrôle d'écoulement actif en boucle ouverte sur le spoiler arrière de la Lamborghini Huracán, permettant de modifier la répartition des forces (portance - trainée) selon les besoins (accélérations, virages, freinages), et pouvant même avoir des actions asymétriques lors de la mise en virage (aero-vectoring)[17]. Ce système a permis à la Lamborghini Huracán de battre le record de vitesse sur le circuit de référence de Nürburgring avec un chrono de 6 min 52 s 0, soit 5 s de mieux que sa rivale allemande la Porsche 918 Spyder[18].
Boucles ouvertes
Le contrôle d'écoulement en boucle ouverte utilise les actionneurs seuls pour modifier l'écoulement. Ces actionneurs fonctionnent alors avec une consigne constante. Dans le contrôle actif, on peut distinguer deux stratégies principales: le soufflage et l'aspiration. Le soufflage consiste à souffler de l'air en amont de la zone de décollement afin de donner assez d’énergie au flux pour rester collé. L'aspiration consiste plutôt à aspirer au travers de la paroi le flux à l'endroit où celui-ci est décollé. Ces techniques nécessitent une bonne connaissance de l'écoulement, car la localisation des systèmes de contrôle est primordiale à son bon fonctionnement.
Actionneurs fluidiques
Il s'agit ici principalement de donner de l’énergie à l'écoulement grâce à des jets d'air. On peut différencier plusieurs actionneurs fluidiques en fonction du type de jet voulu. Il est à noter que la forme du jet en lui-même est également une donnée très importante lors de la mise en place d'une solution de contrôle actif d'écoulement.
Les jets les plus utilisés sont les suivants:
- Jet continu : consiste à injecter simplement un jet soufflant en continu dans le fluide, à vitesse et pression constante.
- Jet pulsé : il s'agit ici d'envoyer de l'air périodiquement, non plus en continu, dans l'écoulement principal. Les actionneurs se comportent alors comme des vannes "on/off", dont la commande se fait via un signal carré dont on peut contrôler la fréquence et le rapport de cycle. Ils nécessitent donc un apport en fluide, tout comme les jets continus. Les jets fabriquent alors des tourbillons qui ont pour action de ramener l'écoulement près de la paroi. La couche limite est en quelque sorte stratifiée en couches de vitesses de plus en plus grandes à mesure que l'on s'éloigne de la paroi, les jets vont ramener l'air le plus rapide dans les domaines où l’écoulement est plus lent[19]. La fréquence ici est un paramètre qui peut être très intéressant à pouvoir gérer, car certains phénomènes aérodynamique ont des fréquences prédéterminées et constantes (Allée de tourbillons de Karman, Instabilité de Kelvin-Helmholtz).
- Jet synthétique : le jet synthétique est un jet permettant une succession d'aspirations/soufflages à des fréquences plus ou moins élevées. Ce jet se présente comme un orifice relié à une membrane vibrante, avec un fonctionnement comparable à celui d'un piston, ou d'un haut-parleur. Cette membrane souffle et aspire l'air à des fréquences allant de 100 à 1 000 Hz, de sorte que le débit moyen soit nul[19]. L'avantage des jets synthétiques est qu'ils ne nécessitent pas d'apport en fluide, contrairement aux deux exemples précédents, seulement un apport électrique. L'air, sortant et entrant de façon alternée dans l'orifice, perturbe l'écoulement très près de la paroi et permet ainsi de rendre la couche limite plus résistante au décollement. L'effet de ce type de jets sur l'écoulement est comparable à celui des jets pulsés.
Actionneurs plasma
Un actionneur plasma est un type d'actionneur formé de deux électrodes asymétriques et séparées par un film isolant. L'application d'une radiofréquence de haute tension aux électrodes génère un plasma faiblement ionisé et de faible température entre les électrodes. Dans le cas des actionneurs plasma pour les applications en dynamiques des fluides, l'air joue le rôle de l'isolant, et les deux électrodes sont implémentées dans une cavité, en contact avec le milieu extérieur par un petit orifice[20]. En appliquant une différence de tension supérieure à la tension de claquage de l'air situé dans la cavité, un arc électrique se crée entre les électrodes. L'air étant confiné dans la cavité, la température et la pression augmentent fortement. La relaxation du fluide par l'orifice forme alors le jet d'air. À la fin de cette phase, la pression à l'intérieur de la cavité est inférieure à la pression extérieure : pour rétablir l'équilibre, l'air extérieur est aspiré.
L'avantage de ce système est qu'il est très peu intrusif, et qu'il ne nécessite pas d'apport en fluide (c'est un autre genre de jet synthétique, par rapport à celui présenté dans les actionneurs fluidiques), mais son principal inconvénient est qu'il nécessite une tension très élevée[21].
Cet actionneur permet donc de modifier localement un écoulement pariétal en introduisant des jet allant jusqu'à 7 ou 8 m/s (en utilisation dans l'atmosphère).
Actionneurs à combustion
Les actionneurs à combustion permettent de créer à l'aide d'une combustion ou une déflagration des grandes perturbations, et ce même dans des écoulements à grands nombres de Mach. Leur principal inconvénient qui fait qu'ils sont très rarement utilisés, est qu'ils nécessitent un apport en comburant et carburant. De plus, ces actionneurs sont limités à des fréquences peu élevées comparées à celles des autres actionneurs évoqués dans cet article[2].
Actionneurs sparkjet
Les actionneurs sparkjets[2] sont des actionneurs placés en paroi et se composant d'une tuyère convergente reliée à une cavité dans laquelle deux électrodes sont brassées et elles-mêmes connectées à un condensateur alimenté par une source haute tension pulsée (par un interrupteur).
Un cycle aérodynamique de l'actionneur sparkjet se compose de trois phases:
- démarrage du cycle: fermeture de l'interrupteur haute tension. Le circuit de charge se transforme en circuit RC (Resistance-Condensateur), permettant une augmentation progressive de la tension aux bornes des électrodes
- dépôt d’énergie: lorsque la tension aux bornes des électrodes atteint la tension de claquage de l'air, la décharge se produit créant un plasma entre les deux électrodes, entretenu tant que la charge du condensateur est suffisante.
- éjection: la phase de dépôt d’énergie engendre une augmentation de la pression (et température) dans la cavité, et donc un jet à la sortie de tuyère. Le retour à l'équilibre se fait par une aspiration d'air dans la cavité, rendant possible le début d'un nouveau cycle. Le débit moyen de ces actionneurs est donc nul.
Boucles fermées
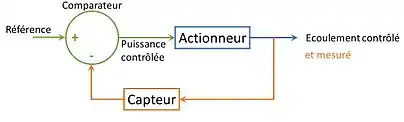
Le contrôle d'écoulement en boucle fermée nécessite donc une chaine de retour ("feedback") imposant la présence de capteurs. Le principe reste le même que le contrôle en boucle ouverte: on place un actionneur dans l'écoulement en présence, et celui-ci va modifier l'écoulement aval. Cependant chacun des actionneurs cité précédemment a au moins un paramètre que l'on peut régler (vitesse, fréquence, pression, etc.). Il s'agit donc ici d'adapter cette ou ces variables, et d'en mesurer les conséquences sur l'écoulement aval afin de pouvoir optimiser ces réglages. Les mesures les plus fréquemment utilisées pour la boucle de feedback sont :
- Mesure de la pression pariétale instationnaire
- Mesure de la vitesse de frottement à la paroi, à proximité de l'écoulement, dit frottement pariétal
Mesure de la pression pariétale
La pression pariétale peut se mesurer à l'aide de capteurs. Le choix du capteur est primordial pour le bon fonctionnement d'un système en boucle fermée. Les principales caractéristiques permettant de choisir un capteur de pression adaptée sont les types de mesures (moyennes, stationnaires, instationnaires), les types de pressions mesurées (différentielles, relatives, absolues), et les ordres de grandeurs à mesurer[22].
De nombreux capteurs de pression ont été développés, utilisant divers principes. On retrouve notamment :
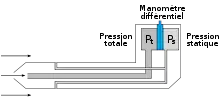
- les tubes de Pitot[23] pour la mesure de la pression statique et de la pression dynamique par mesure différentielle
- les capteurs de pression passifs qui détectent et mesurent la déformation d'une membrane sous l'effort de la pression, comme :
- les capteurs à jauges extensométriques
- les capteurs capacitifs
- les capteurs à fibres optiques
- les capteurs à réluctance variable
- les capteurs à courants de Foucault
- les capteurs de pression dits à éléments sensibles ou actifs pour lesquels l'action directe de la pression impliquera un changement de signal électrique
- les capteurs piézorésistifs
- les capteurs piézoélectriques
- les capteurs magnétostrictifs
- les capteurs photoélastiques
Le choix de l'un ou l'autre des capteurs se fait par les besoins en termes de mesure (selon que l'on cherche à mesure une pression statique ou dynamique), en termes de plage de fonctionnement , de résolution et de bande passante.
La mesure de la pression pariétale permet d'avoir des informations sur l'état de la couche limite et de la turbulence à la localité du capteur. Une telle information peut ensuite être traitée afin d'adapter la stratégie de contrôle d'écoulement dans le cas d'une boucle fermée.
Mesure du frottement pariétal ou de la vitesse pariétale

Un autre paramètre utilisable pour la mise en place d'un contrôle réactif est le frottement pariétal, ou la vitesse pariétale. Le frottement pariétal rend compte de l'état de l'écoulement en proche paroi, et permet notamment de détecter le phénomène de décollement.
Les capteurs les plus utilisés en mécanique des fluides pour mesurer cette grandeur, sont des capteurs thermiques : un fil métallique chauffé par un courant électrique, est refroidi par l'écoulement. Basée sur la variation de la résistance électrique avec la température, la mesure est indirecte et ne permet pas une mesure absolue du frottement pariétal, seulement une mesure relative. Il existe deux sortes de capteurs thermiques : les "fils chauds" placés en travers de l'écoulement, et les "films chauds" quand le fil est déposé sur un support isolant[24].
Notes et références
- « biomimétique »
- Pierre-Yves Pamart. Contrôle des d´ecollements en boucle fermée. Mécanique des fluides [physics.class-ph]. Université Pierre et Marie Curie - Paris VI, 2011. Français.
- Prandtl, L. (1904). Über Flüssigkeitsbewegung bei sehr kleiner Reibung. Int. Math. Kongr Heidelberg. Leipzig.
- L. Prandtl et O. Tietjens. Hydro-und Aeromechanik. Julius Springer, 1931.
- « Historique de l'aviation »
- N. McFadden, G. Rathert et R. Bray. « The effectiveness of wing vortex generators in improving the maneuvering characteristics of a swept wing airplane at transonic speeds ». Dans : NACA Technical Note 3523 (1955), p. 48.
- (en) and CM Ho et P. Huerre, « Perturbed Free Shear Layers », sur https://dx.doi.org/10.1146/annurev.fl.16.010184.002053, (DOI 10.1146/annurev.fl.16.010184.002053, consulté le )
- « Vol Rio-Paris: quand l'équipage perd le contrôle », sur https://www.sciencesetavenir.fr
- « Crash d'AirAsia: l'avion est monté à une vitesse anormale puis a "décroché" », sur http://www.lexpress.fr
- Mohamed Gad-el-Hak, « Flow Control: The Future », Journal of Aircraft, vol. 38, no 3, , p. 402–418 (ISSN 0021-8669, DOI 10.2514/2.2796, lire en ligne, consulté le )
- Joslin, R. D. (Ronald Douglas), 1963-, Miller, Daniel N. et American Institute of Aeronautics and Astronautics., Fundamentals and applications of modern flow control, American Institute of Aeronautics and Astronautics, (ISBN 978-1-56347-983-0, OCLC 755949044, lire en ligne)
- Wesley Lord, Douglas MacMartin et Gregory Tillman, Fluids 2000 Conference and Exhibit, American Institute of Aeronautics and Astronautics, coll. « Fluid Dynamics and Co-located Conferences », (DOI 10.2514/6.2000-2234, lire en ligne)
- Carpenter, P. W. (Peter William), 1942- et Elsevier Science Publishers., Aerodynamics for engineering students, Butterworth-Heinemann, , 608 p. (ISBN 978-0-08-049385-5, OCLC 57192094, lire en ligne)
- « Airfoils, Part 3 », sur www.zenithair.com (consulté le )
- « Portance d'une aile », sur www.lavionnaire.fr (consulté le )
- Eric Coustols, « Effet des parois rainurées ( «riblets ») sur la structure d'une couche limite turbulente », Mecanique & Industries,
- Deki Sajko, « Lamborghini record at the Nürburgring with ALA SYSTEM », (consulté le )
- « Lamborghini: record du 'Ring prouvé par télémétrie », Sportauto.fr, (lire en ligne, consulté le )
- « ONERA - Zoom in the lab - Des jets d’air pour mieux voler », sur www.onera.fr (consulté le )
- (en) D. Caruana, F. Rogier, G. Dufour, C. Gleyzes, « The Plasma Synthetic jet actuator, Physics, Modeling and Flow control application on Separation », The Aerospace Lab Journal, (lire en ligne)
- François Laurendeau, Thèse : Analyse expérimentale et mod´elisation numérique d’un actionneur plasma de type jet synthétique, Thèse INSTITUT SUPERIEUR DE L’AERONAUTIQUE ET DE L’ESPACE (ISAE-SUPAERO), (lire en ligne)
- « Mesure de pressions instationnaires par capteurs », sur techniques-ingenieurs.fr
- Henri Pitot, « Description d'une machine pour mesurer la vitesse des eaux courantes et le sillage des vaisseaux », Histoire de l'Académie royale des sciences avec les mémoires de mathématique et de physique tirés des registres de cette Académie, , p. 363-376
- Jean-Paul SCHON, Geneviève COMTE-BELLOT, Georges CHARNAY, « Anémomètres à fil ou à film chaud », Techniques de l'Ingénieur,