Algorithme de tracé d'arc de cercle de Bresenham
L’algorithme de tracé d'arc de cercle de Bresenham, ou algorithme de tracé d'arc de cercle par point milieu (midpoint en anglais) permet, pour une complexité algorithmique très réduite, de tracer des cercles en image matricielle.
Historique
Cet algorithme, publié par Bresenham[1] en , est inspiré de son travail précédent sur le tracé de segments, et de l'algorithme plus général de Pitteway sur le tracé des coniques[2], dont les cercles sont un cas particulier.
Explication de l'algorithme de base dans le premier octant
Un huitième suffit
Tout d'abord, on peut remarquer que sur une grille de pixels, il existe quatre axes de symétrie au cercle, deux suivant les axes de la matrice, et deux représentant les bissectrices du repère centré sur le cercle. Ainsi, ayant calculé un arc d'un secteur du repère délimité par les axes de symétrie, il suffit d'exploiter la symétrie pour positionner les pixels dans les sept autres octants.
L'algorithme de base
Pour les raisons de symétrie expliquées précédemment, l'algorithme expliqué sera limité au deuxième octant (d'angle compris entre et ) puis généralisé ensuite. L'algorithme partira donc du point le plus haut du cercle, et descendra jusqu'à la première bissectrice.


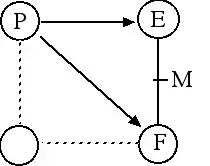
Ce tracé procède par itération, chaque itération activant un pixel. Imaginons que nous sommes en un pixel P, et qu'il faut placer le pixel suivant. Puisque nous sommes dans le deuxième octant, ce pixel sera le point E ou le point F. La méthode de Bresenham consiste à évaluer si le cercle « idéal » d'équation passe au-dessus ou en dessous du point M, milieu du segment EF pour activer respectivement le pixel E ou le pixel F.

Il faut donc calculer à chaque itération une variable m telle que . Alors :

- m > 0 ⇒M au-dessus du cercle idéal ⇒ choix de F ⇒ incrémenter x, décrémenter y
- m < 0 ⇒ M au-dessous du cercle idéal ⇒ choix de E ⇒ incrémenter x
Optimisation de l'algorithme
Pour optimiser l'algorithme, on calcule la variable m récursivement. On montre que (1)

Plaçons-nous au point de coordonnées sur la grille de pixel et calculons la variable m.


On sait alors que M a pour coordonnées .

Donc .
Puisqu'on souhaite ne travailler qu'avec des nombres entiers, et puisque seul le signe de m nous intéresse, on multiplie l'équation par 4 et on obtient .
On va modifier la variable m en fonction du choix du pixel E ou du pixel F. On nommera l'ancienne valeur de m, et la nouvelle valeur de m.


- On montre que si on choisit E, .

Il faut donc incrémenter de .


Si on choisit E, alors .

Or d'après l'équation (1),
,

donc

d'où .

En utilisant le fait que ,
on obtient .
- On montre que si on choisit F, .

Il faut donc incrémenter de .

On en déduit donc le calcul itératif de m : avec d qui vaut 0 si on choisit E, et si on choisit F.


Pour amorcer le calcul itératif, on remarque que donc .


Algorithme optimisé
Algorithme de tracé d'un octant
procédure tracerOctant (entier rayon, entier x_centre, entier y_centre) déclarer entier x, y, m ; x ← 0 ; y ← rayon ; // on se place en haut du cercle m ← 5 - 4*rayon ; // initialisation Tant que x <= y // tant qu'on est dans le second octant tracerPixel( x+x_centre, y+y_centre ) ; si m > 0 alors // choix du point F y ← y - 1 ; m ← m-8*y ; // correspond au "d" des explications fin si ; x ← x+1 ; m ← m + 8*x+4 ; fin tant que ; fin de procédure ;
La variable m représente le « 4m » du paragraphe précédent, puisque seul le signe de 4m nous intéresse et qu'il est le même que celui de m.
Algorithme de tracé du cercle entier
procédure tracerCercle (entier rayon, entier x_centre, entier y_centre) déclarer entier x, y, m ; x ← 0 ; y ← rayon ; // on se place en haut du cercle m ← 5 - 4*rayon ; // initialisation Tant que x <= y // tant qu'on est dans le second octant tracerPixel( x+x_centre, y+y_centre ) ; tracerPixel( y+x_centre, x+y_centre ) ; tracerPixel( -x+x_centre, y+y_centre ) ; tracerPixel( -y+x_centre, x+y_centre ) ; tracerPixel( x+x_centre, -y+y_centre ) ; tracerPixel( y+x_centre, -x+y_centre ) ; tracerPixel( -x+x_centre, -y+y_centre ) ; tracerPixel( -y+x_centre, -x+y_centre ) ; si m > 0 alors //choix du point F y ← y - 1 ; m ← m - 8*y ; fin si ; x ← x + 1 ; m ← m + 8*x + 4 ; fin tant que ; fin de procédure ;
On procède simplement par symétrie dans les différents octants.
Remarques sur la méthode de Bresenham
La faible complexité
On a vu précédemment que pour chaque pixel placé la complexité de calcul se réduisait à X additions, Y multiplications et Z comparaisons. L'utilisation de fonctions trigonométriques usuelles ou d'une racine carrée auraient nécessité un coût algorithmique considérable en comparaison.
Extensions
On peut également se servir du principe de cet algorithme pour tracer des couronnes et des ellipses.
Limites de la méthode
Si l'on trace des cercles concentriques de rayon de plus en plus grand, on remarque que l'on ne parvient pas à remplir tout le plan : il y a des « trous » . Ce défaut amène à utiliser d'autres méthodes, comme l'algorithme de tracé de cercle d'Andres.
Exemple d'implémentation
En C#
public static List<Point> BresenhamCircle(int xc,int yc,int r)
{
List<Point> ret = new List<Point>();
int x,y,p;
x=0;
y=r;
ret.Add(new Point(xc+x,yc-y));
p=3-(2*r);
for(x=0;x<=y;x++)
{
if (p<0)
{
p=(p+(4*x)+6);
}
else
{
y-=1;
p+=((4*(x-y)+10));
}
ret.Add(new Point(xc+x,yc-y));
ret.Add(new Point(xc-x,yc-y));
ret.Add(new Point(xc+x,yc+y));
ret.Add(new Point(xc-x,yc+y));
ret.Add(new Point(xc+y,yc-x));
ret.Add(new Point(xc-y,yc-x));
ret.Add(new Point(xc+y,yc+x));
ret.Add(new Point(xc-y,yc+x));
}
return ret;
}
Notes
- (en) Jack Bresenham, « A linear algorithm for incremental digital display of circular arcs », Communications of the ACM, vol. 20, no 2, , p. 100-106 (DOI 10.1145/359423.359432)
- (en) Michael L.V. Pitteway, « Algorithm for Drawing Ellipses or Hyperbolae with a Digital Plotter », The Computer Journal, vol. 10, no 3, , p. 282-289 (ISSN 0010-4620, OCLC 4653069003, DOI 10.1093/comjnl/10.3.282) [PDF]