Port (système)
En dynamique des systèmes, un port est le lieu par lequel deux sous-systèmes interconnectés échangent de l'énergie[1]. Ce lieu peut être un dispositif technique spécifiquement conçu pour échanger de l'énergie comme par exemple les quatre bornes d'un circuit électrique triphasé (correspondant aux trois phases plus le neutre), ou bien être plus abstrait ou plus diffus comme l'ensemble des surfaces extérieures d'un bâtiment qui échangent de la chaleur avec l'environnement sous les trois formes possibles (conduction, convection, rayonnement).
Lien avec la modélisation des systèmes dynamiques
La notion de port est étroitement liée à la modélisation des systèmes dynamiques et en particulier aux méthodes de modélisation basée sur la conservation de l'énergie comme les graphes de liaisons ou les graphes linéaires. L'utilisation d'analogies, comme celles de Maxwell ou de Firestone, permet de définir des ports pour tous les domaines de la physique (mécanique, électricité, magnétisme, thermique, etc).
En toute rigueur, pour un système donné, tous les échanges d'énergie avec l'environnement devrait être matérialisés par des ports distincts par domaine d'énergie. Toutefois dans la pratique des méthodes de modélisation, les ingénieurs construisent des modèles en faisant des hypothèses simplificatrices qui peuvent amener à négliger certains échanges d'énergie, et donc à ne pas matérialiser les ports correspondant.
Les méthodes de modélisation associent généralement deux quantités variables à un port : l'une représente un effort généralisé et l'autre un flux généralisé, telles que le produit des deux est la puissance instantanée échangée par le port. La signification de ces quantités est détaillée pour quelques domaines physiques dans le tableau suivant :
| Domaine d'énergie | Effort généralisé | Flux généralisé |
|---|---|---|
| mécanique, translation | force | vitesse linéaire |
| mécanique, rotation | couple | vitesse angulaire |
| électrique | tension | courant |
| hydraulique | pression | débit volumique |
| magnétique | force magnétomotrice | variation du flux magnétique |
| thermique | température | chaleur ou débit entropique |
| chimique | potentiel chimique | débit molaire |
Un composant ou partie d'un système comprenant plusieurs ports est appelée un multiport.
Histoire
Le concept de port a été introduit en 1949 par Harold Wheeler et Dettinger[2] dans le cadre de la théorie des circuits électriques. Il a ensuite été étendu aux autres domaines de la physique (mécanique, hydraulique, thermique, etc) par Henry Paynter en 1959 dans le cadre des graphes de liaisons.
Cas des circuits électriques
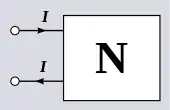
Dans le cas d'un circuit électrique, un port est défini comme un ensemble de bornes pour lesquelles la loi des nœuds est vérifiée. Ainsi un dipôle électrique est un composant comportant un seul port, tandis qu'un transformateur électrique en comporte au moins deux. De même, un quadripôle électrique au sens strict comporte exactement deux ports.
Plus généralement dans un graphe linéaire, toute coupe au sens de la théorie des graphes, vérifie la propriété dite de nodicité. Ceci signifie que les bornes laissées libres par la coupe dans chaque composante connexe du graphe forment un port, les flux généralisés portés par les arêtes de la coupe vérifiant la loi des nœuds[3].
Cas des graphes de liaison
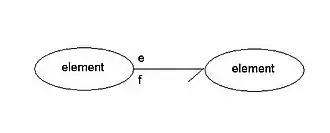
La notion de port est fondamentale dans la théorie des graphes de liaisons. En effet tout élément de cette théorie est un multiport, c'est-à-dire une partie de système comportant un ou plusieurs ports. Deux éléments sont couplés lorsque leurs ports sont connectés par une liaison[4] (bond). Bien que d'une manière générale, les éléments constitutifs de la théorie peuvent être des multiports ayant un nombre arbitraire de ports, les éléments les plus courants possèdent un nombre fixe et limité de ports. Le tableau suivant précise ce nombre pour les principales familles d'éléments :
| Famille d'éléments | Symbole | Nombre de ports |
|---|---|---|
| Jonctions | 0, 1 | ≥ 2 |
| Sources | Se, Sf | 1 |
| Stockages d'énergie | I, C | 1 |
| Éléments résistifs | R | 1 |
| Transformateurs et gyrateurs | TF, GY | 2 |
| Capteurs | De, Df | 1 |
Il est à noter que certains éléments comme les sources ou les transformateurs peuvent être modulés : dans ce cas un port supplémentaire est introduit pour recevoir le signal de modulation. Ce type de port (appelé port signal) est connecté à un autre élément au moyen d'une liaison particulière (appelée liaison activée) et a la particularité de ne pas échanger d'énergie. On considère dans ce cas que la puissance associée au signal est négligeable par rapport aux puissances échangées sur les autres ports[1].
Exemple : le moteur à courant continu
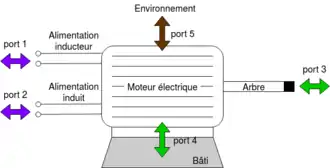
Un moteur électrique à courant continu à excitation séparée, est un dispositif qui convertit l'énergie électrique en énergie mécanique. C'est donc un multiport pouvant avoir, suivant le niveau de modélisation adopté, de trois à cinq ports :
- un premier port électrique pour l'alimentation de l'inducteur (port 1 sur la figure)
- un second port électrique pour l'alimentation de l'induit (port 2 sur la figure)
- un port mécanique pour l'arbre de sortie (port 3 sur la figure)
éventuellement completés de :
- un port mécanique représentant la liaison avec le bâti du moteur (port 4 sur la figure)
- un port thermique représentant les pertes thermiques dans l'environnement (port 5 sur la figure).
Suivant les hypothèses de modélisation, le moteur ne pourra comporter que les trois premiers ports. D'autres hypothèses peuvent amener à introduire des ports supplémentaires. Par exemple si on fait l'hypothèse que le moteur est lié élastiquement au bâti, la force de liaison peut travailler, et par suite de l'énergie peut être échangée au travers du port 4. De même si l'on considère les pertes mécaniques (frottements), magnétiques (hystérésis magnétique) ou électriques (par effet Joule) du moteur, la chaleur produite est rejetée dans l'environnement au travers du port 5.
Notes et références
- (en) Karnopp D.C., Rosenberg R.C. et Margolis D.L., System Dynamics : Modeling, Simulation, and Control of Mechatronics Systems, Wiley, , 635 p. (ISBN 978-0-470-88908-4), p. 19.
- (en) Duindam V., Macchelli A., Stramigioli S. et Bruyninckx H., Modeling and Control of Complex Physical Systems : The Port-Hamiltonian Approach, Berlin Heidelberg, Sprinter, , 423 p. (ISBN 978-3-642-03195-3), p. 4.
- (en) Ioinovici A., Computer-Aided Analysis of Active Circuits, Marcel Dekker, , 591 p. (ISBN 0-8247-8126-0), p. 68-76
- (en) Job van Amerongen et Peter Breedveld, Modelling of Physical Systems for the Design and Control of Mechatronics Systems, International Federation of Automatic Control, coll. « IFAC Professional Brief », 56 p. (lire en ligne), p. 37