Northrop X-4 Bantam
Le Northrop X-4 Bantam est un appareil expérimental biréacteur produit en 1948 par Northrop Corporation. L'avion étant dépourvu d'empennage horizontal, le contrôle en roulis et en tangage est assuré par des surfaces mobiles appelées élevons placées sur les bords de fuite des ailes. Certains aérodynamiciens pensaient à l'époque que la suppression de l'empennage horizontal résoudrait les problèmes de stabilité rencontrés à haute vitesse, cette instabilité étant causée par l'interaction entre les ondes de choc générées par la voilure et celles de l'empennage horizontal. Cette intuition était bonne mais les technologies de l'époque ne permirent pas de développer des commandes de vol suffisamment perfectionnées pour rendre l'appareil complètement stable.
|
X-4 Bantam
| ||
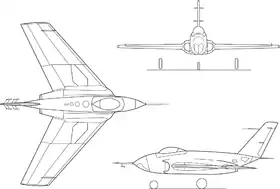
 Vue de face de l'avion | ||
| Constructeur | ||
|---|---|---|
| Rôle | Avion expérimental | |
| Premier vol | ||
| Nombre construits | 2 | |
| Équipage | ||
| 1 pilote | ||
| Motorisation | ||
| Moteur | Westinghouse J30 | |
| Nombre | 2 | |
| Type | turboréacteurs | |
| Poussée unitaire | 7,1 kN | |
| Dimensions | ||
 | ||
| Envergure | 8,2 m | |
| Longueur | 7,1 m | |
| Hauteur | 4,5 m | |
| Masses | ||
| À vide | 2 450 kg | |
| Maximale | 3 550 kg | |
| Performances | ||
| Vitesse maximale | 1 035 km/h | |
| Plafond | 13 400 m | |
Développement
Dans les années 1940, les aérodynamiciens pensaient que la suppression de l'empennage horizontal d'un appareil éviterait l'interaction entre les ondes de choc de la voilure et de l'empennage, améliorant ainsi sa stabilité à l'approche du Mach. Deux appareils utilisant ce concept novateur avaient déjà pris l'air : le Me 163 Komet, un avion fusée allemand utilisé durant la Seconde Guerre mondiale et le de Havilland DH.108 Swallow, développé après guerre par les Britanniques.
Le , l'USAAF passa un contrat avec Northrop en vue de la conception et de la production de deux appareils dépourvus d'empennage horizontal. La société Northrop fut choisie car cet avionneur avait déjà étudié de nombreux concept d'appareils de configuration non conventionnelle et développé plusieurs ailes volantes comme le N-9M, le XB-35, ou encore le YB-49.
Northrop construisit donc deux X-4 mais le premier connut de nombreuses défaillances mécaniques lors de ses dix premiers vols et fut donc retiré du service et utilisé comme réserve de pièce pour le second appareil. Lors des essais en vol, qui se déroulèrent au centre de Recherche sur le vol à haute vitesse du NACA sur la base Edwards, le X-4 se montra fortement instable en tangage lorsque sa vitesse se rapprochait du Mach. Il fut donc conclu qu'un appareil dépourvu d'empennage horizontal n'était pas adapté au vol transsonique, du moins dans l'attente du développement de commandes de vol plus perfectionnées.
Ces appareils étaient très compacts et juste suffisamment spacieux pour embarquer deux réacteurs Westinghouse J30, un pilote, des instruments de bord et 45 minutes de carburant. L'avion était doté de volets d'intrados faisant aussi office d'aérofreins. Du fait de la petitesse de l'appareil, quasiment toutes les opérations de maintenance pouvaient être effectuées sans avoir recours à un escabeau, ni même à un marchepied.
Historique

Le premier X-4 (serial 46-676) fut livré à la base aérienne de Muroc en . Il commença immédiatement ses tests au sol et ses essais de roulage avant son premier vol le avec aux commandes Charles Tucker, pilote d'essai chez Northrop. Quelques jours plus tard le site de Rogers Dry Lake, d'où décollaient les X-4, fut inondé, ce qui bloqua les essais en vol jusqu'à . Le premier X-4 connut de nombreux ennuis mécaniques et fut retiré du service au bout de 10 vols ; il fallut donc attendre la livraison du deuxième appareil pour poursuivre les essais. Ce dernier (serial 46-677) se montra plus fiable que son prédécesseur et effectua 20 vols pour le compte de Northrop. Les deux appareils furent livrés à l'USAAF en , le premier appareil ne reprit jamais l'air et fut utilisé comme réserve de pièces pour le deuxième X-4.
Le NACA équipa le second X-4 d'équipements permettant de recueillir des informations sur le comportement de l'appareil et effectua une série de vols d'essais avec aux commandes des pilotes de l'Air Force dont : Chuck Yeager, Frank Kendall Everest Jr., Al Boyd, Richard Johnson, Fred Ascani, Arthur Murray et Jack Ridley. Le premier pilote du NACA à faire voler l'appareil fut John H. Griffith le .
La suite des essais en vol du X-4, de fin 1950 à , fut consacrée à l'étude des phénomènes d'instabilité en tangage que rencontrait l'appareil à l'approche du Mach. Les pilotes d'essais du NACA notèrent que lorsque l'avion atteignait une vitesse de Ma 0,88, il était soumis à un fort tangage, augmenter la vitesse conduisait au décrochage de l'appareil. Les Allemands avaient eu à faire face au même phénomène lors des essais du prototype du Me 163. De plus, au fur et à mesure que la vitesse augmentait, l'appareil était soumis à des oscillations de plus en plus fortes sur ses trois axes (roulis, lacet et tangage), rendant son pilotage difficile. Ce phénomène est connu sous le nom de couple inertiel et constitua un obstacle sérieux au franchissement du mur du son.
Pour diminuer l'instabilité de l'appareil, les ingénieurs du programme d'essai décidèrent d'augmenter l'épaisseur du bord de fuite des volets. Des cales en balsa furent ajoutées maintenant les volets d'intrados ouverts d'un angle de 5°. Le premier vol du X-4 ainsi modifié eut lieu le , un second se déroula en octobre. Les résultats de cette modification furent bons et les pilotes d'essais notèrent que l'appareil pouvait atteindre la vitesse de Ma 0,92 sans problèmes de tangage.
Les cales en balsa furent retirées et une nouvelle série de vols fut menée afin d'étudier le comportement de l'appareil lors des phases d'atterrissage. Lors de ces essais, une finesse de 3 fut obtenue grâce au basculement des volets d'intrados. Le but de cette série d'essais était de recueillir des données en vue de la conception d'avions fusées. Les tests furent poursuivis mais en une fuite de carburant due à un défaut d'étanchéité d'un réservoir de voilure cloue l'avion au sol jusqu'à .
Les essais menés avec les volets d'intrados modifiés avaient été encourageants, les cales de balsa furent donc remontées et l'épaisseur des élevons fut aussi augmentée. Le premier vol de l'avion ainsi équipé eut lieu le mais un des réacteurs fut endommagé et il fallut attendre le mois d'août avant qu'un moteur neuf ne soit trouvé. Quand les vols reprirent, il fut constaté que les modifications apportées aux volets d'intrados et aux élevons amélioraient sensiblement la stabilité en tangage et en lacet et que la vitesse de décrochage était repoussée de Ma 0,74 à Ma 0,91. Au-delà de Ma 0,91, le X-4 demeurait soumis à des phénomènes oscillatoires rendant malaisé son pilotage.
En , les cales en balsa furent de nouveau démontées afin d'étudier de nouveau les caractéristiques aérodynamiques du X-4 dans sa configuration d'origine. Le X-4 effectua son 81e et dernier vol le . Les deux appareils survécurent au programme d'essai en vol, l'un (serial 46-676) fut d'abord transféré à l'United States Air Force Academy de Colorado Springs avant d'être rendu à la Base Edwards, l'autre (serial 46-677) fut cédé au National Museum of the United States Air Force sur la Base Aérienne de Wright-Patterson où il est toujours exposé.
Les essais en vol du X-4 Bantam démontrèrent que la formule d'avion à aile en flèche dépourvu d'empennage horizontal ne convenait pas aux vols supersoniques. Il fallut attendre le développement des commandes de vol électriques pour que le concept devienne viable et que des appareils comme le F-117 Nighthawk puissent prendre l'air. À l'époque les chercheurs de l'USAF s'intéressaient aussi à un autre concept d'appareil sans empennage horizontal qui présentaient une stabilité supérieure à celle du X-4 : l'aile delta qui équipa avec succès le Douglas F4D, le Convair F-102 et l'Avro Vulcan.