Mécanique du vol de l'hélicoptère
La mécanique du vol de l'hélicoptère est la science qui vise à établir la théorie du vol des aéronefs à voilure tournante. Elle traite plus particulièrement du fonctionnement du ou des rotor(s), puisque ce sont eux qui caractérisent ce type d'aéronef.

La théorie aérodynamique du rotor de l'hélicoptère est fondée sur deux théories :
- la théorie de Rankine-Froude ;
- la théorie des éléments de pale.
Ces deux théories permettent l'analyse d'un hélicoptère existant. Pour une géométrie et une vitesse de rotation données du rotor, et pour une masse connue à sustenter, elles permettent de prédire la puissance sur l'arbre rotor et les pas de pales nécessaires aux différents régimes de vol. Elles servent aussi en phase de conception préliminaire d'un nouvel hélicoptère. Des objectifs de masse à sustenter et de vitesse maximale étant donnés, elles permettent de dimensionner la puissance des moteurs, la taille et la vitesse de rotation des rotors, ainsi que la géométrie de leurs pales (notamment leur corde et leur vrillage), et le débattement des commandes de vol.
Dynamique de battement de la pale
Cet article traite essentiellement de l'aérodynamique du rotor de l'hélicoptère. La compréhension de certains effets aérodynamiques requiert toutefois de connaître quelques éléments de la dynamique de la pale.
Les pales des hélicoptères sont attachées au moyeu par l'intermédiaire d'articulations, ou au moins d'éléments flexibles. Cette disposition évite l'apparition de contraintes excessives à leur emplanture. La nécessité de ces articulations a été découverte par Juan de la Cierva lors de la mise au point de l'autogire qu'il avait inventé en 1923.
Du fait de ces articulations, seule la force centrifuge empêche la pale de se replier vers le haut. En vol, elle est donc en équilibre entre les efforts centrifuges et les efforts de portance. Contrairement à la plupart des autres organes des aéronefs, la pale d'un hélicoptère n'est pas conçue avec un objectif de masse minimale. Elle doit avoir une masse suffisante d'une part pour que l'énergie cinétique du rotor permette une gestion sûre de la panne moteur, mais aussi pour qu'elle adopte une position quasi horizontale sous l'effet de la force centrifuge. Ces exigences conduisent la plupart du temps à rajouter du lest dans les pales.
Dans les mouvements de battement, la force centrifuge tend à ramener la pale vers une position d'équilibre (même effet que celui d'un ressort), tandis que les forces aérodynamiques ont un effet d'amortissement.
On ne décrit dans le présent paragraphe que le calcul de la fréquence du mode propre de battement d'une pale, calcul qui ne requiert que la prise en compte des forces inertielles (l'effet ressort).

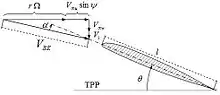
Le modèle adopté ici pour la dynamique de la pale est une simple masse ponctuelle, entraînée en rotation autour d'un arbre par l'intermédiaire d'un bras articulé en un point légèrement excentré de l'arbre. L'articulation représentée ci-contre est une rotule, jouant simultanément les rôles des articulations de battement (mouvements hors plan du disque rotor) et de traînée (mouvements dans le plan). L'excentricité de battement ne joue qu'un rôle secondaire dans la dynamique de battement de la pale. On l'a toutefois représentée dans le schéma ci-contre, car une valeur non nulle de l'excentricité de traînée est obligatoire pour que le moyeu puisse entraîner la pale en rotation.

où :
- est la masse ;
- est la distance de la masse à l'axe du rotor ;
- est la vitesse angulaire du rotor.



Moment de battement de la force centrifuge (en négligeant l'excentricité de battement devant ) :

où :
- est l'angle de battement de la pale ;

Relation fondamentale de la dynamique appliquée aux corps en rotation :

où :
- est le moment d'inertie de la pale autour de son articulation de battement () ;
- est l'accélération angulaire de battement ;



En identifiant les deux expressions du moment de battement de la force centrifuge , on déduit l'équation différentielle gouvernant les mouvements de battement de la pale :


On reconnait une équation différentielle linéaire d'ordre deux à coefficients constants.
En identifiant cette équation à la forme canonique… :

… on conclut que :
- la fréquence propre de battement de la pale est égale à la fréquence de rotation du rotor (ce résultat se généralise à n'importe quelle distribution de masse le long de la pale) ;
- le modèle simplifié utilisé a un amortissement nul (en réalité les forces aérodynamiques, ignorées dans ce calcul, amortissent efficacement les mouvements de battement).

La solution de l'équation différentielle obtenue est une fonction sinusoïdale du temps, dont la fréquence est égale à la fréquence propre, donc à la fréquence du rotor. Observé depuis le fuselage, ce mouvement sinusoïdal de la pale à la fréquence du rotor prend la forme d'une trajectoire circulaire inclinée.
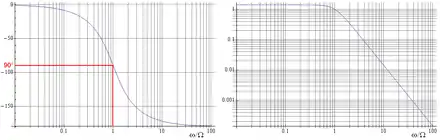
Vis-à-vis de sa réponse aux efforts aérodynamiques, on peut donc envisager la pale comme un filtre passe bas du second ordre dont la fréquence de coupure est égale à la fréquence du rotor, avec la fonction de transfert suivante :

avec :
- la variable de Laplace

Dans les paragraphes qui suivent, on verra que les efforts aérodynamiques qui s’exercent sur la pale sont des fonctions périodiques du temps, de fréquence égale à celle du rotor. La réponse de ce filtre passe bas du second ordre à un stimulus à sa fréquence de coupure présente un déphasage de 90° exactement entre son entrée et sa sortie (voir diagramme de Bode ci-dessous). Ce résultat est important en mécanique du vol de l'hélicoptère : le battement de la pale répond avec un retard d'un quart de tour après la commande.
On remarque aussi que la courbe d'amplitude du diagramme de Bode passe par 0 dB exactement à la fréquence de rotation du rotor. C'est une seconde caractéristique remarquable du rotor de l'hélicoptère. Une variation d'un degré du pas cyclique des pales se traduit, après stabilisation du nouveau plan balayé par l'extrémité de la pale, par une variation d'un degré exactement de l'inclinaison du disque du rotor.
La prise en compte de l'excentricité de l'articulation de battement ou de l'effet ressort du matériau flexible remplaçant l'articulation (sur les rotors dits rigides) ne change pas fondamentalement ce résultat. La fréquence propre de la pale s'en trouve légèrement augmentée, ce qui diminue légèrement le déphasage. La réponse reste toujours retardée de l'ordre d'un quart de tour.
Théorie de Rankine-Froude
La théorie de Rankine-Froude date de la fin du XIXe siècle[1]. Ses concepteurs visaient à modéliser le fonctionnement macroscopique des hélices marines pour prédire leur poussée et la puissance nécessaire à leur rotation (voir aussi : William Rankine et Robert Edmund Froude).
Elle est fondée sur le principe physique de la conservation de la quantité de mouvement dans la veine de fluide mis en mouvement par le rotor. En anglais, la quantité de mouvement est nommée « moment » (au sens du produit entre deux grandeurs physiques ; en l'espèce : la vitesse et la masse). Dans la littérature anglo-saxonne, cette théorie est donc plus connue sous l’appellation de Momentum theory. Elle met en relation :
- la surface du disque balayé par les pales du rotor ;
- la poussée du rotor ;
- la vitesse de l'air au travers du rotor, dite vitesse induite.



Vol stationnaire
En vol stationnaire par rapport à la masse d'air, la force de sustentation F créée par le rotor s'exprime comme suit :
- où est la masse volumique de l'air, la surface du disque du rotor et la vitesse induite (moyenne) de l'air à travers le disque du rotor.


La vitesse induite nécessaire à la sustentation de l'hélicoptère est donc :

et la puissance correspondante (dite puissance induite) :
- .


Cette « puissance induite » est la puissance requise pour communiquer la quantité de mouvement au flux d'air traversant le disque du rotor. Le flux d'air exerce en retour une force de réaction sur le disque rotor. L'hypothèse forte de la théorie de Rankine-Froude est que l'air a une viscosité nulle. Le transfert d'énergie du rotor à la masse d'air se fait donc avec un rendement égal à 1. Il est bien évident qu'un rotor réel consommera plus de puissance que la seule puissance induite. Cette dernière constitue donc un idéal que le concepteur de rotor tente d'approcher.
À titre d'exemple, un petit hélicoptère d'une masse de 700 kg équipé d'un rotor de 7 mètres de diamètre (caractéristiques proches de celles du Cabri G2 de Hélicoptères Guimbal) développe une puissance induite en vol stationnaire OGE (Out of Ground Effect) de :
- = 60 kW = 80 ch.

La vitesse induite vaut :
- = 8,5 m/s.

La puissance induite au stationnaire constitue l'essentiel de la puissance motrice de l'hélicoptère. Elle sert de référence pour caractériser l'efficacité d'un rotor au travers de sa « figure de mérite » (ou FoM, Figure of Merit), rapport entre cette puissance induite et la puissance totale sur l'arbre rotor. La figure de mérite typique d'un rotor d'hélicoptère est de 70 %. On peut aussi rapporter la puissance induite à la puissance totale sur les arbres des moteurs pour obtenir la figure de mérite de l'hélicoptère complet. Les hélicoptères ont une FoM de l'ordre de 60 %.
On peut donc estimer que le moteur du Cabri G2 développe une puissance de l'ordre de 80/0,6 = 133 ch en vol stationnaire OGE en atmosphère standard.
Vol vertical


Ce mode de fonctionnement axial du rotor est aussi celui de l'hélice d'un bateau ou d'un avion. La même équation décrit aussi le fonctionnement de l'éolienne. En vol vertical pur, la portance se généralise comme suit :

avec :
- la vitesse de l'hélicoptère par rapport à la masse d'air en dehors de la veine en mouvement (vitesse dite infini amont ; on notera que si , on retrouve bien la valeur de portance du vol stationnaire) ;
- la vitesse induite, i.e. la vitesse de l'air au droit du disque par rapport à la masse d'air à l'infini amont.


D'où la vitesse induite :

avec :
- la vitesse induite à vitesse verticale nulle.

Puissance induite en vol vertical :

- est la puissance induite ;
- est le travail du poids de l'hélicoptère.


Le graphique du haut ci-contre montre que la puissance induite diminue quand la vitesse ascensionnelle augmente. En montée modérée, le graphique montre que le surcroît de puissance nécessaire à la montée est égal à la moitié du travail du poids. Ce constat ne contredit pas le principe de conservation de l'énergie. L'autre moitié est empruntée à la puissance induite.
De même, en descente modérée, la diminution de la puissance requise est deux fois plus faible que ce qu'on pourrait attendre du travail du poids. Une moitié de ce travail est consommée par une augmentation de la puissance induite.
Le graphique du bas montre aussi les trois solutions de l'équation en descente rapide (i.e. plus de deux fois la vitesse induite au stationnaire). On verra plus bas qu'une seule des trois solutions est stable.
Vol horizontal

Note : le régime de vol étudié dans ce paragraphe est celui où le vecteur vitesse à l'infini amont est parallèle au plan du disque. Le qualificatif de « horizontal » est donc abusif puisque, à vitesse horizontale élevée, le disque s'incline un peu vers l'avant (de l'ordre de 10°) pour générer une composante tractive qui équilibre la trainée aérodynamique du fuselage.
La portance devient :

où est la vitesse de l'hélicoptère par rapport à la masse d'air en dehors de la veine en mouvement (vitesse infini amont).

Les deux composantes de vitesse au droit du rotor et sont perpendiculaires entre elles. D'où l'expression de la portance :


- .

Cette équation est une équation polynomiale en du 4e degré. Il se trouve que seules des puissances paires de y interviennent. Il s'agit donc d'une équation dite bicarrée qui n'est en réalité qu'une équation du second degré en . Sa résolution est donc aisée. La solution est représentée dans la figure ci-dessus.

Vol oblique

La généralisation au vol oblique est due à Glauert (1926). Elle s'exprime comme suit :

où est la vitesse de l'air au travers du rotor, par rapport à un repère lié au disque rotor. Cette équation en se développe comme suit :

- où :

- est la composante normale au plan du disque rotor de la vitesse à l'infini amont ;
- est la projection dans le plan du disque rotor de la vitesse à l'infini amont.
On remarquera que dans cette formule, si on annule le terme de vitesse horizontale on retrouve l'équation du vol vertical et, inversement, si on annule le terme de vitesse verticale on retrouve celle du vol horizontal. Il s'agit d'une équation polynomiale du 4e degré en . Certaines références suggèrent que sa résolution ne peut être obtenue que par des méthodes numériques. Il existe pourtant une expression analytique de la solution, conformément à la Théorie de Galois. La résolution est basée sur la méthode de Ferrari. Bien que l'expression analytique de la solution soit compliquée (solution de l'équation du 4e degré selon Wolfram Alpha[2]), un logiciel de simulation d'hélicoptère utilisera avantageusement ce mode de résolution, plus rapide et plus précis. La figure ci-contre montre la solution de la forme normalisée de cette équation. Elle a été obtenue avec le logiciel Mathematica. On reconnait dans cette nappe surfacique les deux courbes ci-dessus, du vol axial (i.e. vertical) et du vol horizontal.
Le « tuyau » entourant l'axe mérite une attention particulière. Il s'agit d'une solution instable où le rotor, en déplacement axial, pousse de l'air devant lui. On conçoit intuitivement que l'air va tendre à dévier de sa trajectoire pour passer à l'arrière du rotor et être ré-ingéré. C'est effectivement ce qui se passe en descente verticale quand on augmente progressivement la vitesse de chute. Le pilote perçoit d'abord des secousses dues aux changements aléatoires de la géométrie de l'écoulement de l'air qui tantôt s'écoule de manière axiale conformément à la solution de l'équation, et tantôt s'enroule en anneaux tourbillonnaires où il est ré-ingéré par le dessus. Ces changements de régime d'écoulement s'accompagnent de variations de portance, concernant éventuellement seulement une partie du disque, d'où des secousses en tangage ou en roulis. Comme la théorie de Rankine-Froude est justement basée sur l'hypothèse de l'absence de tout vortex dans l'écoulement, on conçoit que la portance réelle en régime de vortex ring state s'écarte considérablement de la portance prédite par la théorie. L'ordre de grandeur de la portance réelle, mesuré en essais en vol ou en soufflerie, est illustré par l'arc jaune de la deuxième figure du vol vertical.

Quand la vitesse de chute augmente, le régime tourbillonnaire s'installe de manière stable. L'écoulement a alors une forme torique, et l'action sur le pas collectif n'a plus l'effet escompté : la vitesse du tourbillon torique est augmentée, sans gain significatif de portance ni de ralentissement du taux de chute (on parle dans la littérature en anglais de settling with power). La seule échappatoire possible est une action sur le manche cyclique pour engendrer une composante de vitesse parallèle au disque. La manœuvre s'accompagne inévitablement d'une perte d'altitude significative.
- nota : si on considère que la situation de « descente » du rotor par rapport à son flux peut se produire y compris en palier, pour peu que l'hélicoptère soit en vent arrière et décélère, on comprend qu'il puisse parfois s'agir d'une situation non voulue dangereuse.
Si au contraire le pilote poursuit sa descente verticale en augmentant encore sa vitesse de chute jusqu'à ce qu'elle excède la valeur de vitesse induite du stationnaire, le sens de l'écoulement au travers du rotor s'inverse, ainsi que le couple rotor. Le rotor entre dans le mode éolienne, ou « moulinet-frein » (windmill brake state). Un rotor d'hélicoptère ne peut entrer que peu ou brièvement dans ce mode, puisque rien n'est prévu pour absorber une quantité significative de l'énergie restituée. Si le pilote persistait dans ce mode, le rotor verrait son régime accélérer, jusqu'à ce que les efforts centrifuges excèdent la résistance structurale du moyeu ou des pales. On peut néanmoins rester indéfiniment juste sur la limite entre le mode hélicoptère et le mode éolienne, en régulant le taux de descente de manière à maintenir le régime rotor dans une plage acceptable. L'hélicoptère est alors en autorotation verticale. Ce régime de vol est peu pratiqué. En cas de panne moteur, l'autorotation avec de la vitesse horizontale est préférable, qui évite le passage par le vortex ring state et surtout qui garantit un taux de chute bien plus faible, et qui permet la plupart du temps de se poser sans dommages.
Ces différents régimes sont repérés sur le deuxième graphique du paragraphe sur le vol vertical.
Effet de la vitesse horizontale sur la répartition de vitesse induite
La théorie de Rankine-Froude s'exprime sous la forme d'une relation liant la charge du disque à la vitesse induite . Cette relation n'est pas une équation différentielle, donc toute variation de portance devrait se traduire instantanément par une nouvelle vitesse induite. Une telle variation instantanée de la vitesse de l'air est physiquement impossible, car elle supposerait une accélération infinie de la colonne d'air. Comme l'air a une masse non nulle, une inertie s'oppose à sa mise en mouvement ou aux variations de sa vitesse. La théorie de Rankine-Froude propose donc une relation entre la charge du disque et la vitesse induite stabilisée.


Les études sur ce sujet[3] montrent que la réponse de portance à un échelon de pas collectif d'un rotor immobilisé (placé horizontalement en haut d'une tour d'essai) présente un dépassement (overshoot) qui peut s'expliquer comme suit :
- Un échelon positif de pas collectif se traduit quasi instantanément par une augmentation proportionnelle de la portance ;
- Juste après l'échelon de pas, la vitesse induite n'a pas encore évolué du fait de l'inertie du volume d'air impliqué dans la portance ;
- Cette masse d'air commence néanmoins à accélérer, la vitesse induite augmente et tend à atteindre la valeur prédite par la théorie de Froude pour la nouvelle portance ;
- Mais dans le même temps, l'augmentation de vitesse induite diminue l'angle d'attaque des pales, donc la portance, qui se stabilise finalement à une valeur supérieure à ce qu'elle était avant l'échelon de pas.
Ce temps de réponse de quelques dixièmes de seconde a un effet significatif en vol d'avancement à basse vitesse. La partie avant du disque rotor « travaille » avec de l'air immobile et bénéficie donc d'une portance maximale. Si on décompose le disque en éléments le long de l'axe de la vitesse, on comprend que les éléments de rotor qui suivent rencontrent de l'air déjà mis en mouvement, d'où une vitesse induite qui augmente et une portance qui diminue, progressivement jusqu'à la partie arrière.
À haute vitesse, d'une part le temps de traversée du disque devient inférieur au temps de réponse de la vitesse induite, et d'autre part la vitesse induite moyenne diminue. La variation longitudinale de vitesse induite s'amenuise donc.
Cette non-uniformité longitudinale de portance tend à faire basculer le rotor latéralement (à gauche ou à droite, selon le sens de rotation du rotor). Cette perpendicularité entre la cause et l'effet a été expliquée au premier paragraphe. Pour obtenir une translation purement longitudinale (i.e. sans dérapage), le pilote doit donc déplacer le manche latéralement pour créer une autre non uniformité de portance longitudinale, égale en valeur absolue et opposée. Ce phénomène est connu sous l’appellation de « bosse de manche latérale » (à ne pas confondre avec la « bosse d'assiette » due à l'effet du souffle rotor sur l'empennage).
La courbe « pas cyclique latéral » du paragraphe « pas de pales » ci-dessous montre l'aspect de cette bosse, qui part de zéro au stationnaire air pour atteindre un maximum de l'ordre de 3° à la vitesse de translation de 25 Kt (6 % de la vitesse périphérique des pales) pour ensuite tendre vers zéro aux hautes vitesses.

Dès 1926, Glauert propose un modèle linéaire de la variation longitudinale de la vitesse induite :

Où :
- et sont les coordonnées polaires du point considéré dans le plan du disque ;
- est le rayon du disque ;
- est la pente de la distribution, fonction de l'inclinaison de la veine d'air au droit du disque.



Pour cette pente , de nombreuses théories ont été proposées successivement, dont on trouve une analyse détaillée dans A Survey of Nonuniform Inflows Models for Rotorcraft Flight Dynamics and Control Applications[4]
Dans les paragraphes qui suivent, les formules présentées sont basées sur la valeur de pente proposée par Blake & White :

Où :
- est l'angle d'inclinaison de la veine d'air par rapport à la normale au disque.

Théorie des éléments de pale

Cette théorie est calquée sur celle de l’aile d'envergure infinie des avions. On décompose la pale en éléments d’extension radiale infinitésimale (voir illustration ci-contre). Pour chacun de ces éléments de pale, on exprime l’angle d’incidence et le module de la vitesse relative de l’air. Connaissant la polaire du profil à cet endroit et dans les conditions considérées, et connaissant la corde de la pale, on déduit l’expression de la portance de chacun des éléments de pale.

Les polaires des profils sont généralement établies par des mesures en soufflerie, à différentes valeurs du nombre de Reynolds. L'exploitation de telles polaires requiert donc de les exprimer sous forme de tables et ne permet que des calculs numériques.
Une autre approche est de modéliser la portance en se basant sur la théorie des profils minces. C'est cette approche qui est décrite ci-dessous. Bien que moins précise, elle permet une formulation analytique des calculs.
Par intégration de la portance élémentaire, de l’emplanture jusqu’à l’extrémité libre, on obtient la portance de la pale.
En intégrant le produit de cette expression par la distance de l’élément au centre du rotor, on obtient le moment de battement de la pale.
Finalement, en sommant les portances des pales on obtient la portance du rotor.

De manière similaire, on somme les composantes longitudinales et latérales des moments de battement des pales pour obtenir les moments aérodynamiques, en tangage et en roulis, s’exerçant sur le disque. Du fait des articulations de battement des pales, ces moments ne sont pas transmis au fuselage. Ils ne sont équilibrés que par l’inertie en battement de la pale. En cas de variation des moments (par exemple sous l’effet d’une action sur le manche cyclique), le rotor retrouve très rapidement un nouvel équilibre où les moments sont de nouveau nuls. Ce nouvel équilibre se traduit par une nouvelle inclinaison du disque. Le temps de réaction du disque est de l’ordre d’une révolution du rotor (soit, pour un rotor de 7 m de diamètre avec un bout de pale à 210 m/s, de l'ordre de 1/10e de seconde).
On notera que la mise en œuvre de la théorie des éléments de pale requiert la connaissance de la vitesse de l’écoulement du flux rotor au droit du disque. Cette théorie est donc nécessairement couplée à celle de Rankine-Froude. Le couplage peut être :
- lâche : on fait l'hypothèse d'une répartition uniforme de la vitesse induite sur toute la surface du disque. On peut alors calculer dans une première étape cette vitesse induite à partir de la portance du rotor et de la vitesse de l'air à l'infini amont. Puis, dans une seconde étape exploitant le résultat de la première, on calcule les pas de pales nécessaires pour l'obtention de la portance ;
- serré : en vol stationnaire par rapport à l'air on peut, par raison de symétrie axiale, décomposer la surface du disque en anneaux ou la vitesse induite est uniforme. On exprime la portance de l'anneau selon la théorie de Rankine-Froude d'une part, et selon la théorie des éléments de pale d'autre part. L'égalité entre ces deux expressions de la portance constitue une équation dont l'inconnue est la vitesse induite dans l'anneau considéré. En résolvant cette équation, on obtient une expression de la vitesse induite en fonction du rayon de l'anneau. Par intégration de cette expression, on obtient finalement une relation liant la portance totale du rotor au pas collectif nécessaire pour obtenir cette portance.
Cette dernière approche est plus difficile à manipuler mais fournit des résultats plus précis. Elle permet de démontrer analytiquement que la loi de vrillage idéale est hyperbolique (), qui rend la répartition de vitesse induite uniforme. Sans même parler de la singularité à l'emplanture (où ), cette loi ne présente toutefois pas d’intérêt pratique. Sa mise en œuvre requiert une pale torsible sous l'effet des actions de pilotage. Seules des recherches sont effectuées dans cette direction, comme l'Active Twist Rotor Control de la NASA[5]. Dans le cas du vrillage linéaire, le plus couramment utilisé dans la pratique, le couplage « serré » résulte aussi en une solution analytique, mais limitée au cas du vol stationnaire. Dans la littérature en anglais, ce dernier couplage des deux théories est désigné par l’acronyme CBEMT (Combined Blade Element & Momentum Theory).


On ne développe ci-dessous que le couplage lâche.
Portance de l'élément de profil :

Où :
- est la masse volumique de l'air ;
- est le coefficient de portance aérodynamique du profil ;
- est la surface (élémentaire) de l'élement de pale
- est le module de la vitesse de l'air sur l'élément de pale.



On raisonne dans le repère pale, et par rapport au plan du disque (Tip Path Plane : plan de la trajectoire de l'extrémité de la pale). Conformément à la loi de composition des vitesses, la vitesse de l'élément de pale est la somme des vitesses de :
- l'hélicoptère par rapport à l'air au travers du rotor ;
- l'élément de pale dans son mouvement de rotation.
L'angle d'incidence est égal au pas de pale diminué de l'angle que forme le vecteur vitesse par rapport au plan du disque. Si on néglige les effets de décrochage du profil près du centre du rotor et si on assimile le coefficient de portance à une fonction linéaire de l'angle d'incidence : (avec selon la théorie des profils minces), la portance de l'élément de pale s'exprime alors comme suit :




Où :
- est la corde de la pale ;
- est l'extension radiale (infinitésimale) de l'élément de pale ( est sa surface)
- est l'azimut de la pale ;
- est le pas collectif ;
- et sont les pas cycliques ;
- est l'angle de vrillage (vrillage linéaire).






Pas des pales
Portance

L'intégration de l'expression ci-dessus de la portance de l'élément de pale, depuis l'emplanture () jusqu'à l'extrémité libre de la pale (), résulte en l'expression de la portance d'une pale ci-contre. Cette expression contient des termes harmoniques jusqu'à trois fois la fréquence rotor. L'expression a été organisée par ordre croissant des fréquences harmoniques.


Quand on somme les contributions des pales, les termes périodiques (fondamental et harmoniques) s'annulent. Il suffit de sommer les termes constants des pales pour obtenir une expression de la portance. En exprimant l'égalité de cette expression de portance avec celle obtenue par la théorie de Rankine-Froude, on dispose d'une première équation liant les pas des pales aux composantes de vitesse.
Moments de battement

L'intégration du produit de l'élément de portance par la distance au centre rotor, depuis l'emplanture jusqu'à l'extrémité libre de la pale, résulte en l'expression du moment de battement de la pale ci-contre. Cette expression contient elle aussi des termes harmoniques jusqu'à trois fois la fréquence rotor. Comme celle de la portance, l'expression a aussi été structurée par ordre croissant des fréquences harmoniques.
Le terme constant est équilibré par les forces centrifuges. Il permet donc de prédire la conicité du rotor.
On a montré précédemment que, en dehors de brèves phases transitoires consécutives à une variation des positions des commandes de vol, les moments sont nuls. En exprimant que les deux termes périodiques fondamentaux (i.e. ceux à la fréquence du rotor) sont nuls, on obtient une deuxième et une troisième équation liant les pas des pales aux composantes de vitesse.
Pas des pales aux différents régimes de vol
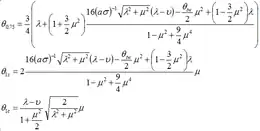
La résolution des trois équations d'équilibre de la portance d'une part et des deux moments de battement d'autre part aboutit aux formules ci-contre des angles de pas des pales en fonction de la vitesse.
À titre d'exemple, pour un vol en palier dans les conditions suivantes… :
- une trainée fuselage correspondant à un CxS de 1,5 % de la surface du disque rotor ;
- une « plénitude » du rotor (rapport entre la surface des pales et la surface du disque, parfois nommée « solidité ») de 10 % ;
- un angle de vrillage des pales de 12°
… les équations précédentes des trois pas de pales (pas collectif, pas cyclique longitudinal et pas cyclique latéral) se représentent graphiquement comme suit :
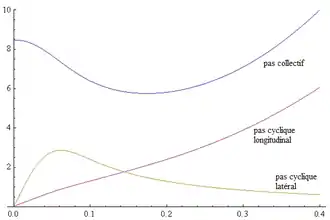
On observe que le pas collectif est élevé au stationnaire, puis diminue quand la vitesse augmente, jusqu'à atteindre un minimum situé dans cet exemple à 18 % de la vitesse en bout de pale (soit 73 Kt avec un bout de pale à 210 m/s). Le pas collectif augmente ensuite de manière monotone jusqu'à la vitesse maximum en palier. Cette vitesse maximum correspond en général à un pas collectif un peu plus élevé que celui du stationnaire, soit de l'ordre de 35 à 40 % de la vitesse en bout de pale dans l'exemple ci-dessus (140 à 160 Kt pour 210 m/s en bout de pale).
Le pas cyclique longitudinal est une fonction quasi linéaire de la vitesse. Cette propriété est mise à profit dans certains systèmes, spécifiques à l'hélicoptère, de mesure de la vitesse air (voir l'article anémométrie des hélicoptères).
Enfin le pas cyclique latéral présente la bosse annoncée dans le paragraphe sur l'effet de la vitesse horizontale sur la répartition de vitesse induite.
Puissance de profil
La puissance de profil est le travail des forces de trainée (drag en anglais, d'où l'indice) des pales. La force de trainée d'un profil aérodynamique s'exprime de la manière suivante :

avec :
- la masse volumique de l'air ;
- le coefficient de trainée aérodynamique du profil de l'élément aérodynamique étudié ;
- la surface de l'élément étudié ;
- le module de la vitesse de l'air par rapport au profil de l'élément étudié.


Comme le coefficient de portance, le coefficient de trainée aérodynamique d'un profil est usuellement identifié en soufflerie et traduit sous la forme d'un réseau de courbes dont l'abscisse est l'angle d'incidence. Le coefficient de trainée dépend aussi du nombre de Reynolds, d'où la nécessité du réseau de courbes. Le graphique ci-contre est un exemple d'un tel réseau de courbes.
Le coefficient de trainée est peu variable dans la région de fonctionnement normal du profil, en deçà des incidences de décrochage. L'analyse de la puissance de trainée d'un rotor est donc souvent établie sur la base d'une valeur constante du coefficient de trainée sur toute la surface du disque (i.e. pour toute position radiale le long de la pale, pour tout azimut de la pale et pour toute vitesse de l'hélicoptère).
Ce choix permet aussi de mieux appréhender ce qu'est la puissance de profil. Si le coefficient de trainée est quasi indépendant de l'incidence, un rotor équipé de pales non vrillées et commandé avec un pas collectif nul (donc ne générant aucune portance) consommera la même puissance de profil que le rotor en fonctionnement normal. La puissance de profil est donc le travail des efforts nécessaires pour vaincre la viscosité de l'air.
Le calcul de la puissance de trainée dissipée par le rotor par décomposition de la pale en sections radiales élémentaires donne de bons résultats. Puissance de trainée d'une section élémentaire :

avec :
- la composante perpendiculaire à la pale de la vitesse de l'air par rapport à l'élément de profil (somme de la vitesse du fuselage par rapport à l'air et de la vitesse de la pale par rapport au fuselage) ;
- la surface de l'élément de profil ( est sa corde et son extension radiale).


En intégrant la puissance de trainée élémentaire de l'emplanture jusqu'à l'extrémité libre de la pale, puis en sommant les contributions des pales, on obtient :

avec :
- la solidité du rotor ( est le nombre de pales et la surface du disque) ;
- est la vitesse en bout de pale ( est la vitesse de rotation du rotor et le rayon du disque) ;
- est le coefficient d'avance (rapport de la vitesse horizontale à la vitesse en bout de pale).



Dans le calcul qui précède, on a fait l'hypothèse que la vitesse de l'air était perpendiculaire à la pale. Cette hypothèse ne vaut qu'en vol stationnaire, ou pour les positions latérales gauche et droite de la pale en vol d'avancement. Dans tous les autres cas, la pale est attaquée par l'air de manière oblique. Contrairement à la portance, la trainée est affectée (en l’occurrence augmentée) par la composante radiale de la vitesse de l'air. Les calculs prenant en compte cet effet aboutissent à un formule identique à celle établie ci-dessus, mais avec une valeur du facteur devant augmentée de 3 à 4,6.

Dans l'exemple du petit hélicoptère présenté précédemment, en prenant en outre les hypothèses suivantes… :
- coefficient de trainée de 0.0065 ;
- 3 pales ;
- corde de 20 cm (soit environ 5 % du rayon) ;
- vitesse en bout de pale de 210 m/s ;
- densité de l'air de 1,225 kg/m3 (valeur au niveau de la mer en atmosphère ISA)
… on obtient une puissance de trainée au stationnaire de :
- = 19 kW = 26 ch.


On notera qu'avec une puissance induite de 80 ch et une puissance de profil de 26 ch, la figure de mérite est de 80/(80+26) = 75 %. Cette valeur optimiste (la valeur usuellement citée est de 70 %) s'explique essentiellement par le fait qu'on a négligé les tourbillons en bout de pale. Ces tourbillons sont dus à ce qu'on pourrait comparer, en faisant une analogie électrique, à un « court-circuit » entre la surpression régnant à l'intrados et la dépression à l'extrados. Une modélisation plus fine de l'aérodynamique de la pale montre que tout se passe comme si les 3 % de longueur extérieure de la pale ne généraient aucune portance tout en consommant de la puissance de trainée.
On a vu que la puissance induite varie comme l'inverse de la racine carrée de la surface du disque, donc comme l'inverse du rayon. En tenant compte de cette réduction forfaitaire de 3 % du rayon du disque, on obtient une estimation de puissance induite plus élevée, et une estimation de la figure de mérite proche des valeurs usuellement citées.
Notes et références
- (en) John S. Carlton, Marine propellers and propulsion, Oxford, Butterworth-Heinemann, , 533 p. (ISBN 978-0-7506-8150-6 et 978-0-080-54923-1, OCLC 731737084, lire en ligne), p. 169-171
- Wolfram Alfa
- (en) Response of a helicopter rotor to an increase in collective pitch for the case of vertical flight - Jean Rebont, Jacques Valensi et Jean Soulez-Larivière, NASA, janvier 1961 [PDF]
- (en) A Survey of Nonuniform Inflows Models for Rotorcraft Flight Dynamics and Control Applications - Robert T. N. Chen, NASA Technical Memorandum 102219, novembre 1989 [PDF]
- (en) Aerodynamic Design Study of an Advanced Active Twist Rotor - Martin K. Sekula, Matthew L. Wilbur, et William T. Yeager, Jr., NASA Langley Research Center, janvier 2004 [PDF]
Bibliographie
Principales sources utilisées pour la rédaction de l'article :
- (en) Hermann Glauert, The elements of aerofoil and airscrew theory, (lire en ligne)
- (en) Army Material Command, Alexandria, Virginia, Engineering Design Handbook : Helicopter Engineering - Part 1 Preliminary Design, (lire en ligne)
- (en) Wayne Johnson, Helicopter Theory, (lire en ligne)
- (en) Raymond W. Prouty, Helicopter Aerodynamics, (lire en ligne)
- J.P. Petit, La passion verticale, (lire en ligne)
- Pierre Rougier, Mécanique du vol de l'hélicoptère, vol. 1, Lavoisier, , 230 p. (lire en ligne)