Anémométrie des hélicoptères
En aéronautique, l'anémométrie est la science de la mesure de la vitesse d'un aéronef par rapport à l'air, et de l'utilisation de cette mesure.
Selon son étymologie, le mot anémométrie désigne l'art de la mesure du vent.
L'emploi du terme anémométrie en aéronautique pourrait donc paraitre inapproprié. Pour le comprendre, il faut se référer à la notion de vent relatif des aérodynamiciens. Ces professionnels utilisent beaucoup les essais en soufflerie. Ils ont donc tendance à se représenter l'aéronef comme un objet immobile dans une veine d'air en mouvement, d'où cette notion de vent relatif. Le pilote parlera plutôt de "vitesse de l'avion par rapport à l'air" (ou plus brièvement de "vitesse air"). La notion de vitesse étant par essence relative, il s'agit finalement de la même chose. L'anémométrie aéronautique concerne donc, elle aussi, la mesure du vent, mais du vent relatif.
Pour piloter un aéronef, la connaissance du vent (au sens commun du terme, i.e. de la vitesse de la masse d'air par rapport au sol, qu'on pourrait qualifier de vent absolu) est également importante. Les systèmes anémométriques à bord des aéronefs n'en réalisent toutefois pas la mesure directement.
Les techniques anémométriques utilisées à bord des avions et des hélicoptères sont jusqu'à ce jour identiques (système dit "Pitot-Statique"), ce qui est inadapté eu égard aux capacités de vol spécifiques d'un hélicoptère. De ce fait, un pilote d'hélicoptère ne dispose d'aucune indication de sa vitesse par rapport à l'air quand il manœuvre autour du stationnaire, en vol latéral ou en vol arrière.
L'objet de cet article est d'expliquer en quoi la mesure de la vitesse air d'un hélicoptère pose des problèmes différents de celle des avions, et d'exposer les efforts réalisés par l'industrie aéronautique pour tenter de combler la lacune des basses vitesses dans l'anémométrie des hélicoptères.
Aérodynamique
Les forces aérodynamiques qui agissent sur un aéronef dépendent essentiellement de la vitesse relative de l'air par rapport à ses surfaces aérodynamiques. L'expression générale d'une force aérodynamique , valable quel que soit l'aéronef est :


avec :
- : coefficient de portance , ou de traînée
- : surface de l'élément aérodynamique étudié
- : vitesse air
- : masse volumique de l'air






D'après la loi des gaz parfaits, la masse volumique de l'air s'écrit, en kg/m3 :

avec :
- pression de l'air (Pa),
- la capacité thermique massique (ou chaleur spécifique) de l'air (J kg−1 K−1), et
- température (K).



La masse volumique de l'air est donc proportionnelle à sa pression et inversement proportionnelle à sa température. On peut aussi écrire cette relation sous la forme suivante :

avec :
- = 1,225 kg/m3 : masse volumique de l'air à
- = 1 013,25 hPa, et
- = 288,15 K



L'expression de la portance peut être scindée en deux facteurs :
- l'un, constant, ne dépendant que de la géométrie de l'avion :
- l'autre, variable, dépendant de sa vitesse actuelle et de l’atmosphère dans laquelle il évolue :


Le rôle principal d'un anémomètre à bord d'un aéronef est donc de fournir à l'équipage une mesure de ce second facteur.
Sur un avion à ailes fixes, cette mesure est cruciale pour le pilotage. Elle est notamment le seul moyen pour éviter de voler en deçà de la vitesse de décrochage.
Sur un hélicoptère, c'est une vitesse minimum de rotation du rotor qui garantit la sustentation. La mesure de la vitesse du fuselage par rapport à l'air est de ce fait moins critique.
Sur n'importe quel aéronef, il est aussi souhaitable de disposer de mesures des angles de dérapage et d'incidence. Mais ce n'est pas une obligation : les petits avions par exemple ne sont pas équipés de tels moyens de mesure.
Sur les avions volant à grande vitesse (haut subsonique ou supersonique), un machmètre s'avère indispensable.
Une mesure de l'altitude barométrique est aussi obligatoire sur tout type d'aéronef. Il ne s'agit pas directement d'anémométrie : l'indication de l'altitude barométrique est basée sur la mesure de la pression statique, indépendante par définition de la vitesse. On verra cependant que cette mesure intervient dans les systèmes conventionnels de mesure de la vitesse air.
Enfin, le système de données air est généralement complété par un moyen de mesure de la température extérieure (OAT : Outside Ambiant Temperature).
Vitesses
Vitesse-air
La vitesse-air est la vitesse relative des molécules de l'air à l'infini amont par rapport à un trièdre convenu lié au fuselage.
Chacun des éléments de cette définition mérite d'être commenté :
- la vitesse des molécules d'air : les molécules d'un gaz sont individuellement animées d'un mouvement brownien, dont la vitesse quadratique moyenne à température ambiante est de plusieurs centaines de mètres par seconde (voir distribution des vitesses). Pour être précis, il faudrait donc parler de vitesse moyenne des molécules de l'air.
- l'air à l'infini amont : le déplacement de l'aéronef dans la masse d'air perturbe cette dernière. Pour donner sens à la notion de vitesse relative des molécules d'air, il faut donc préciser qu'on parle d'une région de la masse d'air non perturbée par l'aéronef. L'acceptation stricte de la non perturbation impose de considérer une région infiniment loin. Mais ce faisant, on est contraint aussi de ne considérer que des masses d'air à champ de vitesse uniforme, i.e. exemptes de tourbillons ou de cisaillements. Dans la pratique, une région située en avant de l'aéronef à une distance de l'ordre de la dimension de l'aéronef convient.
- la notion de vitesse relative à un trièdre doit être comprise au sens général d'un mouvement dans un espace à trois dimensions, c'est-à-dire en tant que vecteur 3D. Une seule mesure ne suffit donc pas à définir cette vitesse. Il faut soit un module et deux angles (le dérapage et l'incidence), soit les trois composantes : longitudinale, latérale et normale, dans le trièdre fuselage.
Ces considérations permettent d’appréhender la difficulté de la mesure d'un paramètre dont la simple définition soulève de nombreuses questions. C'est particulièrement vrai dans le cas de l'hélicoptère. En effet, le flux d'air (vulgairement désigné par "le souffle du rotor ") , dont la section, la direction et la vitesse sont très différentes de la direction et de la vitesse de l'hélicoptère par rapport à l'air à l'infini amont prend une importance aérodynamique relative de plus en plus grande au fur et à mesure que la vitesse diminue, au point de rester le seul élément actif en vol stationnaire.
Incidence et dérapage
L'angle d'incidence est l'angle formé par le vecteur vitesse-air et le plan du trièdre fuselage. Il est usuellement défini positif quand l'air impacte l'intrados de l'aile comme dans l'illustration ci-dessous.

![[x,y]](https://img.franco.wiki/i/1b7bd6292c6023626c6358bfd3943a031b27d663.svg)
L'angle de dérapage est l'angle formé par le vecteur vitesse-air et le plan du trièdre fuselage. Il est usuellement défini positif quand l'air impacte le flanc droit du fuselage (le dérapage est négatif dans l'exemple de l'illustration ci-dessous).

![[x,z]](https://img.franco.wiki/i/5b6fa16c75359acb44c7ef65feec4ff4d8209afb.svg)
Vitesse-sol
La vitesse-sol est la vitesse d'un point de l'aéronef (par exemple son centre de gravité moyen) par rapport à un trièdre "sol" (i.e. lié au globe terrestre). Un trièdre sol couramment utilisé est le trièdre géographique local, définissant les composantes nord, est et verticale de la vitesse sol. S'agissant de la vitesse relative entre deux solides, la définition est plus simple que celle de la vitesse-air.
Instruments de bord
Pilotage
L'anémomètre à bord d'un aéronef est avant tout un instrument de pilotage.
L'indicateur de vitesse-air est muni de repères définissant un domaine à respecter pour ne pas compromettre la sécurité du vol.
Sur avion, le décrochage est le phénomène dangereux le plus connu. Il se produit, dans des conditions de masse et d'altitude données, en deçà d'une vitesse-air connue, déterminée lors des essais en vol. Le paramètre de base conduisant au décrochage n'est pas la vitesse-air mais l'incidence de la voilure principale. Certains avions sont munis de capteurs d'incidence, également exploités pour alerter quand l'avion s'approche des conditions de décrochage.
Tout aéronef doit également respecter une vitesse maximum (VNE : Velocity to Never Exceed) au-delà de laquelle il risque d'être endommagé, de devenir incontrôlable, ou plus généralement de voir sa sécurité de vol compromise.
Navigation
Les procédures de navigation exploitent essentiellement la position géographique et la vitesse-sol.
Elles requièrent également la connaissance du vent. Le vent peut être estimé à bord à partir des deux mesures de vitesse sol et de vitesse-air (par soustraction des vecteurs, selon la méthode dite du "triangle des vitesses").
Certaines procédures de navigation utilisent aussi l'anémomètre directement.
Système Pitot-Statique
Avions et hélicoptères sont tous équipés du système anémométrique dit Pitot-statique. Cet équipement fournit le module d'une grandeur anémométrique vectorielle appelée vitesse conventionnelle, notée ou CAS (Calibrated Air Speed).

Principe du tube de Pitot
Le système est composé :
- d'un tube de Pitot, couramment appelé « Pitot », du nom de son inventeur, qui fournit la pression dite totale des filets d'air provenant de l'infini-amont ;
- d'une prise de pression de référence, mesurant la pression statique de l'air (pression ambiante).

L'incidence et le dérapage ont une influence parasite sur la précision de la mesure, assez minime tant que les angles en question ne dépassent pas la dizaine de degrés. Le Pitot est souvent placé, sur les avions, en avant du bord d'attaque de l'aile sur un support adéquat ou bien sur une perche dépassant du nez du fuselage. La pression recueillie est générée par l'arrêt total des filets d'air qui auraient dû passer par le trou.
La pression totale théorique, ou pression d'impact, est égale, pour les faibles vitesses subsoniques à :

On voit qu'il suffit de soustraire à pour obtenir une valeur dite pression différentielle, fonction de et de , donc de et de


C'est le rôle de la seconde prise de pression, dite statique, de fournir . Cette prise de pression peut être intégrée au corps du tube de Pitot, sous forme d'un trou ou de fentes latérales. Mais elle peut être ailleurs sur le fuselage en particulier sur les hélicoptères. C'est donc un casse-tête pour les constructeurs d'hélicoptères car aucun emplacement de prise statique ne peut échapper à des filets d'air non tangentiels provenant soit de l'air-amont soit du flux intense du ou des rotors. L'air-amont théorique peut provenir de toutes les directions sur un hélicoptère, contrairement au cas de l'avion.
La pression différentielle dépend non seulement de mais aussi de (la masse volumique de l'air), donc de et de .
La formule suivante est valide dans les basses vitesses subsoniques (jusqu'à de l'ordre du tiers de la vitesse du son) :

avec :

Un calculateur de données air (ADC, Air Data Computer) acquiert , et et calcule la valeur de , en appliquant l'équation réciproque :
- .

Vitesse conventionnelle
Tous les aéronefs ne sont pas équipés d'ADC. Les avions les plus simples sont dotés d'un anémomètre mécanique. Il s'agit d'un simple indicateur de pression différentielle, dont l'échelle est graduée avec des indications de vitesse.
Pour disposer les graduations, on a fait l'hypothèse de l'atmosphère standard (atmosphère type OACI), soit et
On appelle vitesse conventionnelle () la vitesse fictive indiquée par un tel instrument. Dans le domaine des basses vitesses subsoniques, la relation entre et la véritable vitesse est :

n'est donc égale à que si on vole en atmosphère dans laquelle vaut réellement 1,225 kg/m3. Dès qu'on vole en altitude, s'écarte significativement de la vitesse-air réelle. Par exemple, à l'altitude de 10 000 pieds, la densité de l'air est de =0,738. Si la vitesse-air réelle est de 200Kt, la vitesse conventionnelle affichée ne sera que de = 172Kt, soit une erreur de 14 %. Quand bien même l'avion est équipé d'un ADC capable de calculer la vitesse vraie (dite TAS, ou True Air Speed), on préfère afficher la vitesse conventionnelle plutôt que la vitesse vraie. Ceci est dû au fait que reflète les efforts aérodynamiques, et qu'à ce titre elle est plus utile pour le pilotage que la vitesse-air vraie.

La vitesse-air réelle est tout de même utile, pour la navigation « à l'estime ». Sur les avions non équipés d'ADC, le pilote doit faire lui-même le calcul à partir de , de (l'altitude-pression) et de .

Anémométrie à bord des hélicoptères
L'hélicoptère est un aéronef à voilure tournante. Son concepteur souhaiterait une vitesse angulaire du rotor principal la plus élevée possible, qui permettrait :
- de concevoir des pales légères, qui seraient maintenues quasiment perpendiculaires à l'axe de rotation par la force centrifuge, malgré leur faible masse ;
- de réduire leur corde, puisque la portance est proportionnelle à la surface et au carré de la vitesse.
Mais, par ailleurs, aucun élément de la pale ne doit atteindre ou dépasser la vitesse du son, sous peine de subir une augmentation brutale de sa trainée (phénomène connu sous l'appellation de "divergence de Mach"), accompagnée d'un fort moment piqueur. La vitesse maximale est atteinte par l'extrémité de la pale qui avance, avec une valeur égale à la somme de la vitesse du bout de pale au stationnaire et de la vitesse de l'hélicoptère. Pour ménager une vitesse de l'hélicoptère suffisante quelle que soit la température, dont dépend la vitesse du son dans l'air, le concepteur adopte une vitesse en bout de pale au stationnaire égale à environ deux tiers de la vitesse du son en atmosphère ISA, soit de l'ordre de 210m/s. Ceci correspond à une vitesse de rotation comprise entre 200 et 500 tours par minute selon le rayon du rotor.
La voilure de l'hélicoptère, le rotor, assure la sustentation et la propulsion. Dans ce but, la surface active du rotor, matérialisée par le plan qui contient les pales, est rendue orientable. La solution classique comporte une cinématique spéciale de commandes de vol utilisant de manière quasi universelle un ensemble de plateaux dits " cycliques" actionnés par une liaison mécanique (plus rarement électrique : fly-by-wire) entre mains du pilote et pales du rotor.
Un système de deux plateaux cycliques superposés, l'un fixe (en fait, orientable), l'autre mobile (en rotation avec le rotor) permet de passer de mouvements mécaniques dans les références spatiales du pilote (le fuselage dans lequel il est assis pour piloter) en variations de pas cyclique et de pas collectif des pales du rotor. Pas cyclique signifie que chacune des pales, articulée sur un bras du moyeu du rotor voit la valeur de pas modifiée (ou modifiable) en permanence et pour chaque valeur de sa position en azimut sur les 360° de son mouvement permanent. L'hélicoptère (à la différence de l'avion) possède trois degrés de liberté de translation dans l'espace. L'hélicoptère n'a donc pas les mêmes contraintes anémométriques que l'avion. Les technologies utilisées ne sont donc pas les mêmes.
L'hélicoptère a toujours été équipé avec un système anémométrique en tous points semblable à celui de l'avion. La vitesse maximale atteinte en 2008 par les hélicoptères les plus rapides ne dépasse pas 250 kt, vitesse subsonique (quand on ne considère que le fuselage).
Basses vitesses
Le domaine de vol de l'hélicoptère complète celui de l'avion tout en y empiétant assez largement. La voilure tournante, avec ses commandes spécifiques de pas cyclique et de pas collectif des pales, permet à cet aéronef de voler dans toutes les directions relatives à son axe XF longitudinal et à toutes les vitesses, en particulier en dessous d'une cinquantaine de nœuds, en vol vers l'arrière et en vol transversal. Le pilotage dans le domaine des basses vitesses ne peut se pratiquer qu'en vol à vue, aucune instrumentation anémométrique certifiée n'étant à ce jour disponible.
Hautes vitesses
La vitesse maximale atteinte par un hélicoptère conventionnel ne dépasse pas les 200 kt. Au-delà, des phénomènes liés à la nature même du fonctionnement aérodynamique du rotor apparaissent : dissymétries, zones de portance défavorisées, phénomènes de compressibilité avancés. Les bi-rotors contrarotatifs coaxiaux et l'aile auxiliaire sont des solutions prometteuses pour dépasser cette limite (Sikorsky X2, Eurocopter X3).
Une autre solution d'aéronef capable de voler en stationnaire et à haute vitesse est celle du convertible, tels que le Bell XV-15 (en) et le V22 Osprey. Ces engins peuvent difficilement être considérés comme des hélicoptères tant la mécanique en diffère. Néanmoins, l'aérodynamique de leurs deux rotors dans le domaine des basse vitesse est identique à celle des hélicoptères et elle est soumise aux mêmes contraintes et limitations. Ceci entraine les mêmes problèmes d’anémomètre que ceux des hélicoptères.
Le système Pitot-statique se retrouve dans des conditions de fonctionnement à peu près équivalentes à celles d'un avion et fournit de la même manière la vitesse conventionnelle VC sur son anémomètre de bord. Le tube de Pitot est fixé sur le fuselage et orienté selon le plan longitudinal de symétrie du fuselage, il n'y a pas d'ailes à privilégier comme sur un avion.
Les possibilités de modifier les vitesses verticales au moyen de la commande de pas collectif, inexistante sur un avion, sont la cause de modifications importantes de l'angle d'incidence du fuselage, donc de la direction d'arrivée des filets d'air sur le tube de Pitot. Bien que dépendant, en gros, du cosinus de l'angle d'incidence, peu variable dans la zone +/- 15°, des angles plus élevés sont courants, tant en montée qu'en descente. Les normes de certification JAR 27, JAR 29, FAR 27 et FAR 29 n'imposent d'étalonnage que pour le vol en palier horizontal, pour lequel le constructeur aura évidemment calé préférentiellement le tube de Pitot, au detriment eventuel des autres conditions de vol possibles.
La commande de pas collectif a pour effet de créer, à partir d'une situation stabilisée, une vitesse verticale proportionnelle à la modification de pas des pales. Cette variation de vitesse verticale ne dépend pratiquement pas de la vitesse VA. Donc, la variation d'incidence de l'air sur le fuselage et le Pitot est d'autant plus forte que la vitesse-air VA est faible.
Pitot inexploitable aux basses vitesses
L'incidence du fuselage de l'hélicoptère peut varier de 0 à 359° sans dommages dans les basses vitesses. La seule constante, dans un vol non acrobatique, est que l'assiette longitudinale du fuselage reste à peu près horizontale. Le rotor et le fuselage qui lui est lié restent donc à peu près horizontaux, indépendamment de la direction du vecteur vitesse-air. En effet, le rotor, pour produire les forces de propulsion, n'a besoin de s'incliner que très peu dans le sens de la force à produire. On atteint ainsi, aux basses et moyennes vitesses vers l'avant, des angles d'incidence du fuselage pour lesquels le Pitot ne fonctionne plus selon le mode normal prévu. En conséquence, un tube de Pitot n'est pas apte à détecter de manière utilisable les composantes de flux d'air arrière, transversales et verticales.



Le rotor de l'hélicoptère est assimilable en première approximation, à un disque plan PR. Ce disque PR contient les pales, tendues lorsque le régime de rotation d'entrainement des pales est nominal. La somme de toutes les forces aérodynamiques créées par les pales se réduit à une force unique FR dont la composante FN perpendiculaire au plan du disque en constitue l'essentiel. Le plan du disque peut s'incliner dans tous les sens par rapport au moyeu mécanique d'entraînement en rotation. On parle de « basculement » du rotor. On mesure le basculement par les deux angles ar basculement longitudinal et br basculement latéral par rapport au plan normal au moyeu. Ce basculement est créé :
- – volontairement par la commande cyclique des pales à disposition du pilote (manche cyclique) ;
- – involontairement par une variation, par rapport à un état initial stabilisé, du vecteur vitesse-air V d'alimentation (ou amont du rotor). Cette rétroaction après une commande de variation du vecteur vitesse V (module - incidence - dérapage) est un élément clé des qualités de la stabilité statique de l'hélicoptère.
L'expression de la pression différentielle Pitot, valable aux faibles vitesses, montre que la forme parabolique de la courbe possède une tangente horizontale au point V = 0. Ce qui veut dire que la pression ne varie pas avec la vitesse. Il faut attendre plusieurs dizaines de mètres par seconde pour enregistrer une pression utilisable avec des capteurs de sensibilité classique. Il faut atteindre déjà 25 nœuds soit 12 m/s ou 46 km/h pour noter 1,0 hPa de pression. Alors qu'à 150 nœuds, on note 37 hPa. Le Pitot est donc pratiquement inexploitable aux basses vitesses par manque de sensibilité et resserrement excessif des graduations.


Technologies anémométriques spécifiques aux hélicoptères
Ces technologies peuvent se classer en deux catégories :
- celles mettant en œuvre des capteurs externes, directement en relation avec le phénomène à mesurer, à savoir l'écoulement de l'air ;
- celles basées sur la mécanique du vol de l'hélicoptère, exploitant des mesures "internes" telles que les positions des commandes de vol, le moment de flexion du mât rotor, les facteurs de charge... Les anémomètres qui entrent dans cette deuxième catégorie sont désignés ci-après "anémomètres analytiques"
LORAS

Le système LORAS[1] (low-range airspeed system) est le seul moyen actuellement connu, opérationnel, développé en milieu industriel et équipant réellement quelques hélicoptères depuis les années 1970. Il équipe notamment :
- Les premières versions d'AH-64 Apache
- une partie de la flotte des hélicoptères Dauphin HH-65 « Coast Guard » commandés à Eurocopter en 1979 Eurocopter HH-65 Dolphin.
Le principe de ce système consiste à exploiter les mesures de deux tubes de Pitot montés tête-bêche et animés ensemble d'un mouvement de rotation propre (i.e. indépendant du rotor, bien que le LORAS soit souvent installé au-dessus du rotor). Du fait de la rotation, les pressions d'impact mises en jeu sont significatives. La différence entre les mesures des deux tubes est un signal sinusoïdal dont l'amplitude est proportionnelle à la vitesse à mesurer (et non à son carré), et dont la phase représente la direction de la vitesse à mesurer. Il s'agit donc bien d'une mesure vectorielle. Les capteurs sont disposés dans le champ aérodynamique du rotor, contrairement aux pratiques habituelles qui placent le système « Pitot-statique » le plus loin possible de ce champ. Les mesures sont pourtant d'une précision satisfaisante moyennant une calibration du système en fonction de l'installation. Sur les Apache Longbow, où le mât rotor est occupé par un viseur de conduite de tir, le capteur LORAS a disparu au profit d'autres dispositifs placés sur les capots des moteurs.
Le LORAS n'est pas très répandu à cause de la complexité de son installation à bord, au sommet du mât rotor principal. Il est constitué d'un moteur électrique entraînant en rotation (600 tours par minute environ) un bras comportant deux prises Pitot de pression dynamique diamétralement opposées. L'extraction (démodulation synchrone) de l'amplitude et de la phase de la différence de pression entre les deux prises de pression par rapport à un axe (O,XF) lié au fuselage permet d'accéder à la vitesse air V1 et à ses deux composantes sur le plan rotor, V1HX et V1HY.
LASSIE
Commercialisé par la firme GEC Avionics (formerly Elliott Brothers (London) Ltd) of Rochester, Kent, United Kingdom (en), LASSIE II (Low AirSpeed Sensing Indication Equipment) est une copie du système dit « girouettes de vol stationnaire » mis au point à l'EPNER.
Le principe consiste en deux girouettes (Dual-Axis Low Airspeed System) placées directement sous le rotor principal et dont les axes mobiles sont respectivement parallèles aux axes OXF et OYF du fuselage. Ces girouettes s'alignent selon la direction locale du flux d'air venant juste de traverser le rotor. Les déviations des drapeaux des girouettes sont transmises électriquement à l'instrument de pilotage associé. Les girouettes doivent être situées le plus près possible des pales sous le rotor à environ la moitié du rayon de ce rotor. Il est généralement obligatoire de prévoir des supports externes, ou perches, importants et disgracieux, soumis aux intempéries et au givrage.

Pour le besoin d'essais en vol, toujours limités dans le temps et sur quelques prototypes, cette solution fonctionne très bien mais dans un domaine de faibles vitesses assez réduit. On l'a surtout utilisé pour la réalisation des essais de performances en vol stationnaire-air en altitude.
Anémomètres à ultra-sons
Cette technologie est utilisée dans les stations météo au sol.
Quelques tentatives d'installation sur des hélicoptères sont documentées, mais aucune réalisation industrielle sur des hélicoptères habités n'est connue. Ceci est probablement dû à la difficulté de s'affranchir des perturbations du flux d'air généré par le rotor principal.
Indicateur de planche de bord pour hélicoptère de T.W. Kenyon
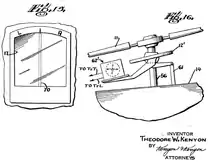
En 1959, T.W. Kenyon dépose un brevet sur un indicateur de planche de bord pour hélicoptère(). Cet indicateur comprend notamment un dispositif de mesure du module et de la direction de la vitesse de l'hélicoptère par rapport à l'air, dont l'inventeur revendique le fonctionnement y compris aux basses vitesses autour du stationnaire par rapport à l'air.
Ce dispositif est basé sur un gyroscope de verticale, solidaire du plateau cyclique, mesurant les deux angles d'inclinaison de ce dernier par rapport au plan horizontal. En vol stationnaire stabilisé par rapport à l'air, le plateau cyclique d'un hélicoptère est effectivement horizontal quels que soient la masse et le centrage de l'hélicoptère. Kenyon en déduisait manifestement que les deux angles d'inclinaison du plateau étaient proportionnels aux deux composantes de vitesse longitudinale et latérale ce qui lui permettait, avec les moyens de traitement rudimentaires disponibles à l'époque, de proposer un indicateur vectoriel de vitesse air.
L'histoire ne dit pas si Kenyon a constaté par lui-même les limitations de son invention, mais des travaux postérieurs, dont certains sont exposés dans les paragraphes qui suivent (Durand, Faulkner), ont montré que le dispositif de Kenyon ne fonctionnait qu'en conditions stabilisées. Dès que l'hélicoptère connait une accélération vectorielle non nulle, ce dispositif est fortement erroné.
On notera toutefois que même si le dispositif demandait des améliorations pour diminuer ses erreurs sous accélération, il s'agissait bien d'un travail de pionnier. Cet indicateur était tout à la fois le premier VIMI (Vitesse Indiquée par Moyens Internes) et le premier AVC (Anémomètre Vectoriel Calculé).
AVC et VIMI de B. Durand
Inventé en 1974 par Bernard DURAND ingénieur navigant d'essais en vol français ( Brevets d'invention Publications INPI FR-2688314 et FR-2567270 ).
Dispositif de A. Faulkner & S. Attlefellner
En 1979, A.J. Faulkner et S. Attlefellner (MBB GmbH, Allemagne) publient (, page 18, A81-12094), dans le cadre du 5e ERF (European Rotorcraft Forum) un article intitulé A Method of Helicopter Low Airspeed Estimation based on Measurement of Control Parameters. Ils décrivent un système de mesure du vecteur vitesse air basé sur la mesure du moment mât d'une part, et sur les pas cycliques et collectif du rotor principal d'autre part. Les algorithmes décrits sont basés sur les équations de la mécanique du vol de l'hélicoptère.
L'année suivante, les mêmes auteurs publient un nouvel article à l'ERF, intitulé Flight Investigations of a Helicopter Low Air Speed Estimation System Based on Measurement of Control Parameters.
VIMI estimait les angles d'inclinaison du disque rotor par rapport au fuselage à l'aide d'accéléromètres, reposant ainsi sur l'hypothèse que les forces aérodynamiques qui s’exercent sur le fuselage ainsi que la poussée du rotor arrière sont négligeables. S'agissant de la poussée du rotor arrière, on peut admettre qu'elle est sensiblement constante et donc que son seul effet est un décalage du zéro de la mesure de la vitesse air latérale. Pour ce qui concerne la trainée du fuselage, qui croît comme le carré de la vitesse, cette hypothèse n'est valide qu'à basse vitesse.
L'estimation de l'inclinaison du disque rotor par rapport au fuselage dans le système de Faulkner repose sur une mesure du moment dans le mât du rotor principal, au droit du moyeu. Elle semble donc plus apte à couvrir la totalité du domaine de vitesses. Ces travaux de Faulkner & Attlefellner n'ont pourtant donné lieu à aucune réalisation industrielle connue.
CLASS de Thales
La société CROUZET (faisant aujourd'hui partie du groupe Thales Avionics) a acquis les droits sur le VIMI de B. Durand (licence exclusive selon la communication Thales : ) pour l'incorporer à son système CLASS (Crouzet Low Air Speed System, marque déposée : ).
Selon Thales, ce système :
"... répond au problème de la mesure des basses vitesses air sur les hélicoptères, pour la gestion du vol, la navigation et les systèmes de conduite de tir. Exploitant les caractéristiques de vol de l'hélicoptère, en particulier des mesures des positions des commandes des pas cycliques et les angles d'attitude, CLASS réalise la combinaison des basses vitesses calculées et des mesures de vitesse air conventionnelles pour délivrer une information complète. Cette information est valide sur tout le domaine de vol et ne requiert l'installation d'aucune sonde additionnelle."
En 1989, Thales dépose un brevet relatif à un système de mesure des composantes horizontales de la vitesse de l'hélicoptère (procédé et dispositif de détermination de la vitesse par rapport à l'air d'un hélicoptère : ).
Selon ce document, les perfectionnements par rapport au VIMI de B. Durand consistent en :
- l'utilisation des positions des quatre commandes de vol de l'hélicoptère (les deux pas cycliques du rotor principal et les pas collectifs des deux rotors : principal et anti-couple) ;
- la mise en œuvre de formules polynomiales plutôt que linéaires ;
- un algorithme d'auto-étalonnage remplaçant les réglages manuels du VIMI de Durand
Thales n'a pas communiqué quant à l'utilisation éventuelle de ce système sur des hélicoptères actuellement en exploitation.
LAASH de Litef
Litef Analytical Airspeed System for Helicopters.
Estimateurs du vecteur vitesse air basés sur des réseaux de neurones artificiels
Pendant la décennie des années 2000, de nombreux travaux universitaires ont repris l'idée originale de Kenyon pour tenter à nouveau d'estimer le vecteur vitesse air par moyens internes (à partir des positions des commandes de vol essentiellement), mais en utilisant la technique des réseaux de neurones artificiels.
Si on considère que tous les brevets précités étaient tombés dans le domaine public (la durée de protection apportée par un brevet étant de 20 ans), ces travaux ont manifestement été motivés par une précision insuffisante des systèmes VIMI cités précédemment.
À titre d'exemple d'un tel système à réseau de neurones, on peut citer celui décrit par la thèse de Ozcan Samlioglu () : "A Neural Network Approach for Helicopter Airspeed Prediction" (Naval Postgraduate School, Monterey, California). Les erreurs annoncées dans ce rapport de recherche sont inférieures au nœud, ce qui est comparable à la précision d'un système Pitot/statique bien étalonné, dans son domaine de fonctionnement. Ces résultats tendent à faire penser que les VIMI ont atteint le niveau de maturité nécessaire à leur déploiement sur tous les hélicoptères.
Ces systèmes à réseaux de neurones requièrent toutefois un grand nombre de paramètres complémentaires en entrée (pour compenser l'effet de sol, pour tenir compte de la masse...). Dans sa thèse, Samlioglu propose un total de 15 mesures ou estimations annexes, ce qui fragilise l'information obtenue, puisque la panne de n'importe laquelle des entrées se propage sur l'estimation de vitesse.
Un autre facteur limitatif est que la technique des réseaux de neurones est mal adaptée aux systèmes critiques. Ceci est dû à la difficulté d'en démontrer la stabilité.
En l'état des recherches, on peut donc difficilement prédire une généralisation prochaine de ces systèmes sur les hélicoptères civils.
Notes et références
Annexes
Articles connexes
Liens externes
- (en) Low Airspeed Measuring Devices for Helicopter Usage Monitoring Systems - C. G. Knight, DSTO Platforms Sciences Laboratory, [PDF]
- (en) European Helicopter Safety Team (EHEST)
- (en) Patent 5214596 Issued on May 25, 1993 : System for determining the airspeed of helicopters