Navigation aérienne
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route aérienne.
Historique
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique. Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Les outils nécessaires
- La montre: la pratique de la navigation requiert l'usage d'une montre pour le calcul des heures estimées de passage aux points de report et de l'heure d'arrivée à destination.
Elle permet aussi de déterminer la vitesse sol de l'avion en mesurant le temps nécessaire pour parcourir une distance et en comparant ce résultat avec le temps qu'il aurait fallu sans vent. La montre fut utilisée à partir de 1956 dans la navigation aérienne.
- Le rapporteur : il est indispensable de pouvoir mesurer les angles sur la carte pour naviguer. La trajectoire latérale est en effet caractérisée par une route, que l'on exprime par un angle par rapport au nord géographique et au nord magnétique.
- La règle : il en existe plusieurs types, les plus adaptées au cockpit des avions étant les règles de petite taille. Elles permettent, outre le tracé des routes, de mesurer les distances à parcourir.
- Le journal de bord ou log de navigation : c'est le document répertoriant les points tournants, les segments de la route à suivre, les temps et les distances.
- Le crayon et la gomme : le crayon et la gomme permettent de tracer la route sur la carte aéronautique pour un vol donné. Il sera préférable d'utiliser une mine grasse pour permettre d'effacer sans traces.
Navigation à vue
VFR : Visual Flight Rules.
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, ou même en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a deux méthodes de navigation :
Le cheminement
Cheminer consiste à suivre les lignes naturelles caractéristiques bien visibles depuis un avion. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
On appelle aussi cheminement le fait de se diriger, à vue, d'un point connu à un repère identifié, puis de celui-ci à un autre repère identifié.
On peut cheminer de VOR en VOR, en utilisant les moyens de radionavigation. Enfin, le GPS permet de passer sur des points "FIX" prédéfinis et utilisés dans les procédures standard de départ (SID), en route ou d'approche (STAR).
Navigation à l’estime
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct : la ligne droite.
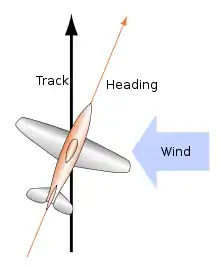
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. En vol, le premier tronçon permet de tester cette dérive et d'en faire éventuellement une nouvelle estimation pour le tronçon suivant.
D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères. En vol, l'écart entre l'heure estimée et l'heure réelle de passage du premier repère, dû au vent éventuellement rencontré, permet d'estimer plus finement l'heure de passage au repère suivant : si vous avez mis plus de temps que prévu pour rejoindre ce premier repère, vous augmentez proportionnellement le temps estimé pour rejoindre le repère suivant.
Au passage sur ce dernier repère, l'écart entre l'heure réelle de passage et l'heure estimée vous permet de recalculer l'heure de passage au repère suivant. Cette technique est répétée au passage de chaque repère.
Les formules de calcul de la prise en compte du vent sur la route
Exemple avec :
- Vitesse propre - Vp : 120 kn
- Distance D : 90 NM
- Route magnétique Rm : 065°
- Vent provenance 190°
- Velocity Wind Vw : 25 kn
| Formule | Résultats | |
|---|---|---|
| 1 / Facteur de base | Fb = 60 / Vp | Fb : 60 / 120 = 0,5 |
| 2 / Dérive max | Xm = Fb × Vw | Xm : 0,5 × 25 = 12,5 |
| 3 / Valeur de l’angle | α : tjs < 90 route [+ 180°] – Vent° | 065° + 180° - 190° = 55° |
| 4 / Angle vent α | si degré > 20 : sinus α = (dizaines degrés + 2) / 10
si degré ≤ 20 : sinus α = (dizaines degrés + 1) / 10 sin(10)=0,2 sin(20)=0,3 sin(30)=0,5 sin(40)=0,6 sin(50)=0,7 | sin (55°) = (5,5 + 2) / 10 = 0,75 |
| 5 / Dérive | X = Xm × sin α | X = 12,5 × 0,75 = 9,4 |
| 6 / Cap Compas | m –(X) = Cm –(d) = CC | 065° + 9,4 = 75° |
| 7 / Vent effectif | Ve = Vw × cos α
Pour mémoire cos α = sin (90 - α) | Ve = 25 kn × sin(90 - 55)
Ve = 25 × sin 35 = 25 × 0,5 = 12,5 kn |
| 8 / Vitesse sol | Vs = Vp ± Ve | Vs = 120 kn + 12,5 kn = 132,5 kn |
| 9 / Nouveau Facteur Base | NFb = 60/Vs | NFb = 60 / 132,5 = 0,45 |
| 10 / Temps estimé | Te = distance × NFb | Te = 90 × 0,45 = 40 min |
Navigation par erreur systématique
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime en direction d'un repère facilement "cheminable" (côte maritime par exemple, fleuve etc.) mais très en amont (erreur systématique) du repère que l'on souhaite réellement atteindre, la destination par exemple. Il suffit alors de cheminer le long du premier repère, la côte dans notre exemple. L'erreur systématique permet de connaître à coup sûr la direction à prendre à partir de ce premier repère remarquable.
Navigation aux instruments
Elle est basée sur le suivi d'axes radioélectriques, ou situés entre deux waypoints PBN. Dans ce cas, un équipement PBN est nécessaire (GNSS, IRU,DME/DME, DME/DME/IRU, VOR/DME)[1].
C'est la navigation utilisée pour un vol IFR.
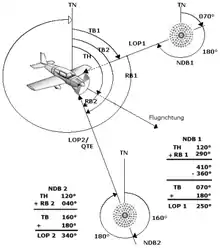
Radionavigation
C'est une navigation basée sur l'utilisation de balise au sol, elle permet de voler en moyenne et haute altitude en déterminant les trajectoires que l'avion doit suivre. Les balises de radionavigation permettent aussi contrôler une navigation à l'estime VFR, effectuer du VFR on top (vol au-dessus des nuages), effectuer de l'IFR.
Navigation astronomique
Pour les très longues distances, ce type de navigation, utilisée dans la marine, a également été utilisée en avion. Pour la navigation astronomique les avions étaient équipés d'une bulle sur le dos du fuselage pour permettre l'utilisation d'un sextant.
Navigation inertielle
La navigation inertielle utilise un instrument, la centrale inertielle, qui dispose d’un ensemble d'accéléromètres et de gyroscopes capables de mesurer les accélérations et les vitesses de rotation selon les trois axes de l'espace. L’intégration de ces mesures au cours du temps permet de calculer la vitesse et l'altitude de l’avion et donc sa trajectoire. Cette technique est totalement indépendante des moyens extérieurs, discrète puisqu’elle n’utilise pas la radio et reste la plus précise pour les besoins militaires (erreur circulaire de l’ordre du kilomètre par heure de vol).
La navigation inertielle sans autre moyen utilise un instrument très coûteux et n’est plus utilisée que pour les besoins militaires. Elle a été utilisée par l’aviation commerciale dans les régions dépourvues d’infrastructure radioélectriques avant l’apparition des moyens satellitaires. La dérive des centrales nécessite d’effectuer un recalage de temps en temps lorsqu’on doit effectuer une navigation précise.
La navigation inertielle reste actuellement utilisée dans l'aviation commerciale mais avec une hybridation faite avec l'aide soit des GPS (IRS/GPS) soit de la radio navigation (IRS/RadioNav). Ce type de navigation permet d'assurer la continuité de la navigation avec une meilleure précision que celle apportée uniquement avec une centrale inertielle. La radionavigation seule ne peut évidemment pas être faite par exemple au-dessus des océans, mais la navigation satellitaire ne peut elle-même pas être garantie en permanence pour entre autres des raisons de masquage de satellite ou dans le cas de dysfonctionnement des satellites.
Corrélation d’altitude ou d’image
L’avion est équipé d’un calculateur qui emporte en mémoire une carte numérique des altitudes, des échos radars ou des images du terrain. Il utilise un radioaltimètre, un radar ou une caméra pour « lire » les altitudes ou la topographie du terrain survolé. Le calculateur effectue une corrélation entre l’information en mémoire et l’information lue pour en déduire la position.
Les systèmes de navigation par corrélation sont autonomes mais ne sont pas discrets. Leur précision est très bonne, voire excellente, mais leur coût est très élevé. Ils ne sont utilisés que pour les applications militaires et permettent le recalage des systèmes à inertie, en particulier à proximité de l’objectif.
Navigation satellitaire
À partir de 1990, les États-Unis ont mis en place un système de navigation, le GPS, utilisant des balises sur satellites. Le principe de base est identique à celui de la radionavigation. En recevant l’émission en provenance d’une balise le récepteur calcule sa distance ; il est donc sur une sphère centrée sur le satellite. L’intersection de deux sphères donne un cercle ; l’intersection avec une troisième sphère donne deux points et enfin un point unique avec la réception d’une quatrième émission.
L’avantage des systèmes satellitaires sur les systèmes classiques de radionavigation est son accessibilité et sa précision constante sur l’ensemble du globe terrestre.
Le défaut principal du GPS est qu’il appartient au ministère de la défense des États-Unis et qu’il est susceptible d’être rendu indisponible sur simple décision politique. L’Union soviétique avait commencé le déploiement d’un système équivalent, le GLONASS, mais l’avenir de ce système est incertain. L’Union européenne développe un autre système, Galileo.
Sur le plan technique, les systèmes satellitaires de navigation sont actuellement les plus précis. Le très faible coût des récepteurs permet d’envisager l’équipement de tous les types d’aéronefs.
Le problème le plus épineux du GPS concerne l'intégrité du système, notamment pour l'utilisation future lors d'approches de précision. L'intégrité d'un système est sa capacité à détecter une dégradation au-delà d'un seuil fixé et à avertir l'utilisateur sans excéder un temps d'alarme. On doit être sûr que le signal utilisé pour une approche de précision est absolument fiable. Dans le cas de l'ILS par exemple, on ne doit pas rayonner de faux-signaux plus de 1 seconde par exemple pour la cat 3 et 6 secondes pour la catégorie 1. Un système de contrôle automatisé provoque l'arrêt de la station en cas de mauvais rayonnement.
Évolution probable
Sur un plan technique les systèmes satellitaires de navigation combinent les avantages des systèmes de radionavigation pour un coût bien plus faible. La réduction du coût des calculateurs permet de développer des ensembles de navigation qui superposent les données sur une carte, simplifiant ainsi, sinon éliminant, la fonction de navigation. Ces systèmes existent pour l’aviation de loisir et sont largement utilisés par les autres activités aériennes.
Le pilote devra toutefois disposer en permanence de l’accès à une autre technologie en cas de panne ou d’arrêt du système satellitaire.
La radionavigation ne permet de suivre que des trajectoires composées de segments de droite (aux approximations près des systèmes de projection utilisées en cartographie). Les systèmes satellitaires permettent de suivre des trajectoires quelconques ; à terme, cette capacité devrait révolutionner le contrôle aérien en multipliant le nombre de « routes » disponibles, y compris pour l’approche et l’atterrissage. De plus, la précision de ces systèmes devrait permettre de diminuer les espacements entre avions tout en maintenant un niveau adéquat de sécurité. Des expérimentations ou des projets sont en cours sur les routes et les zones les plus chargées : nord-est des États-Unis, Atlantique-Nord et Europe de l’Ouest.
Notes et références
- « Applicable Sensors », sur pbnportal.eu (consulté le )