Espace contractile
En mathématiques, un espace topologique est dit contractile s'il est homotopiquement équivalent à un point. Tous ses groupes d'homotopie sont donc triviaux, ainsi que ses groupes d'homologie de degré > 0.
Exemples et contre-exemples
Tout espace vectoriel normé (ou même : tout espace vectoriel topologique sur ℝ) est contractile, à commencer par la droite réelle et le plan complexe.
Plus généralement, toute partie étoilée d'un tel espace (en particulier : tout convexe non vide, comme un intervalle réel ou un disque) est clairement contractile[1].
Le cône de tout espace topologique est contractile[1].
La n-sphère Sn n'est pas contractile bien que, pour n ≥ 2, elle soit simplement connexe.
En fait, une variété compacte de dimension n>0 n'est jamais contractile. Voir l'appendice de [2], où ce résultat est appelé "théorème fondamental de la topologie différentielle."
La sphère unité d'un espace de Hilbert H de dimension infinie est contractile (et même[3] difféomorphe à H). Plus généralement, dans tout espace vectoriel normé de dimension infinie, la sphère unité est contractile[4].
Un CW-complexe dont tous les groupes d'homotopie sont triviaux est contractile. Il en va donc de même pour une variété M de classe C∞. De plus, dans ce cas, l'application identité de M est homotope à une application constante par une homotopie non seulement continue mais de classe C∞. En effet, dès que deux applications lisses entre variétés lisses sont continûment homotopes, elles sont C∞-homotopes[5].
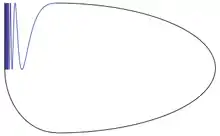
Le « cercle polonais », obtenu en ajoutant à la courbe sinus fermée du topologue un arc joignant (0, –1) à (1, sin 1), n'est pas contractile, bien que tous ses groupes d'homotopie soient triviaux.
Il existe des espaces qui, bien que contractiles c'est-à-dire se rétractant par déformation sur (un sous-espace réduit à) un point, ne se rétractent pas fortement par déformation sur un point[6].
Définitions équivalentes
Soit X un espace topologique non vide. Les énoncés suivants sont équivalents[7] :
- X est contractile ;
- l'application identité de X est « homotopiquement nulle », c'est-à-dire homotope à une application constante ;
- X se rétracte par déformation sur un point ;
- le cône de X se rétracte par déformation sur X ;
- toute fonction continue à valeurs dans X est homotope à une application constante ;
- deux fonctions continues quelconques à valeurs dans X (définies sur un même espace) sont toujours homotopes.
Notes et références
- H. Cartan, Cours de C3, Algèbre et géométrie : Groupe fondamental, revêtements, Orsay, 1968-1969 (lire en ligne), p. 8 : Exemples d'espaces contractiles.
- Jacques Lafontaine, Introduction aux variétés différentielles, EDP Sciences,
- (en) Andrzej Granas et James Dugundji, Fixed Point Theory, Springer, , 690 p. (ISBN 978-0-387-00173-9, lire en ligne), p. 82.
- (en) J. Dugundji, « An extension of Tietze's theorem », Pacific J. Math., vol. 1, , p. 353-367 (lire en ligne), Corollary 6.4.
- (en) Gerd Rudolph et Matthias Schmidt, Differential Geometry and Mathematical Physics : Part I. Manifolds, Lie Groups and Hamiltonian Systems, Springer, (lire en ligne), p. 188.
- (en) Allen Hatcher, Algebraic Topology (lire en ligne), chap. 0, exercice 6(c), commenté dans (en) « Why doesn't the “zig-zag” comb deformation retract onto a point, even though it's contractible? », sur math.stackexchange.com.
- Ces équivalences sont indiquées, sous une forme à peine différente, dans Cartan 1968-1969, p. 7.