Dérivée directionnelle
En analyse mathématique, la notion de dérivée directionnelle permet de quantifier la variation locale d'une fonction dépendant de plusieurs variables, en un point donné et le long d'une direction donnée dans l'espace de ces variables. Dans la version la plus simple, la dérivée directionnelle généralise la notion de dérivées partielles, dans le sens où l'on retrouve ces dernières en prenant comme directions de dérivation les axes de coordonnées.
Le concept de dérivée directionnelle est fondamental en analyse. Il est parfois le point de départ pour définir la dérivée d'une fonction, qui décrit comment sa valeur est modifiée lorsque ses arguments varient de manière infinitésimale mais arbitrairement (et non plus le long d'une direction préfixée) : la dérivée au sens de Gateaux est définie de cette manière, mais aussi le sous-différentiel d'une fonction convexe et le sous-différentiel de Clarke d'une fonction lipschitzienne. C'est aussi un concept précieux pour obtenir des conditions nécessaires d'optimalité en optimisation.
On comprend alors pourquoi l'on a introduit de multiples notions de dérivée directionnelle, qui sont plus ou moins bien adaptées à la régularité (i.e. au caractère lisse) de la fonction étudiée et dont l'utilité et le domaine d'application dépendent de leurs propriétés. Les développements sont très raffinés et se poursuivent ; l'étude des liens entre eux mériterait une monographie. Nous nous contenterons ici de donner les principales définitions en commençant par les plus familières et les plus simples.
Fonction définie sur un espace vectoriel
Définition
Soient E un espace vectoriel normé, U un ouvert de E, f une fonction définie sur U à valeurs dans un espace vectoriel normé F (ou plus généralement, un espace vectoriel topologique séparé). On donnera la qualification de points aux éléments de U et de vecteurs aux éléments de E, les raisons en seront détaillées au-dessous. Soient également u un point de U et h un vecteur de E.
La dérivée de f au point u suivant le vecteur h est, si elle existe, la dérivée en 0 de la fonction de la variable réelle :


Si h est le vecteur nul, cette limite existe toujours et a une valeur nulle. On pourra supposer que h n'est pas le vecteur nul dans ce qui suit.
Lorsque l'espace E est de dimension finie n et muni d'une base, la fonction f peut être vue comme une fonction de n variables réelles, et le calcul des dérivées directionnelles suivant les vecteurs de base correspond au calcul des dérivées partielles de f :

Si on remplace h par un vecteur colinéaire αh, le calcul de dérivée est identique à la multiplication par le facteur α près :

Ainsi, lorsqu'il existe en un point une dérivée suivant un vecteur, il en existe une suivant tout vecteur de même direction, mais la valeur de cette dérivée directionnelle dépend du choix du vecteur. On parlera de dérivée directionnelle de f au point u dans la direction de h lorsque le vecteur h est unitaire[1].
En revanche il n'y a pas de raison a priori d'observer un résultat particulier lorsqu'on somme deux vecteurs h et h'.
Définition alternative
La définition ci-dessus définit la dérivée dans la direction de h lorsque le vecteur h est unitaire.
Certains auteurs définissent la dérivée dans la direction d'un vecteur quelconque par :


Le lien avec la définition précédente est donc : pour .


Intuitivement, la dérivée directionnelle de au point u représente le taux de changement de , mesuré selon la direction , par rapport au temps, lorsqu'on passe par le point u.


Cas d'une fonction différentiable
Si la fonction f est différentiable au point u, alors elle admet des dérivées en ce point dans la direction de tout vecteur. Cette dérivée se calcule à partir de l'application différentielle en u (notée df(u)) par application de la formule

si bien que cette fois, le résultat est linéaire en h. Notamment,

Enfin, si E est un espace vectoriel de dimension finie n muni d'une base, il est possible de calculer toutes les dérivées directionnelles en termes de dérivées partielles

En général, la réciproque est fausse : le fait qu'une application présente des dérivées en u dans toutes les directions n'assure pas sa différentiabilité, ni même sa continuité. Cependant, la réciproque est vraie si la fonction est définie sur un espace vectoriel de dimension finie n, est à valeurs réelles et est convexe : il suffit qu'elle ait des dérivées partielles suivant n vecteurs linéairement indépendants pour qu'elle soit différentiable (au sens de Fréchet).
Si E est un espace vectoriel euclidien et f une application différentiable à valeurs réelles, il est possible d'utiliser le gradient de f pour exprimer la dérivée directionnelle

Lorsque f présente un extremum local en un point d'un ouvert, le gradient est nul en ce point (pour une étude plus détaillée voir point critique), ainsi que toutes les dérivées directionnelles.
Interprétation géométrique
La dérivée de la fonction f au point u dans la direction du vecteur h se calcule comme la dérivée en 0 de la fonction d'une seule variable réelle g(t) = f(u + th). Cette dernière s'interprète comme la restriction de f à la droite affine passant par u et dirigée par h.
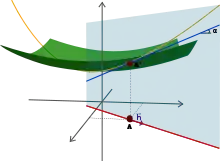
Si l'on associe à la fonction la surface (S) d'équation cartésienne z = f(x, y), la notion de dérivée dans la direction d'un vecteur unitaire en un point de U peut être interprétée ainsi : le plan vertical contenant la droite passant par A et dirigée par h coupe la surface (S) selon la courbe paramétrée (C) :




La fonction M est dérivable en 0 si et seulement si f admet en A une dérivée dans la direction de h ; dans ce cas, il existe une tangente au point — qui est le point de (S) à la verticale de A — et est la composante verticale du vecteur directeur de cette tangente.


Si f est différentiable en A, l'inégalité de Cauchy-Schwarz permet d'écrire (avec toujours h unitaire)

avec égalité si (et seulement si) h est colinéaire au gradient de f en A.
La pente de la tangente est donc maximale en choisissant la direction du gradient, ce qui est à la base des méthodes de descente dans les problèmes de minimisation[2].
Définition
Soient E un espace vectoriel, F un espace vectoriel normé et une fonction. On dit que f est directionnellement dérivable au sens de Dini en dans la direction si la limite dans la définition de ci-dessous existe dans F :





Gateaux-différentiabilité
Soient E et F deux espaces vectoriels normés. Une fonction est dite Gateaux-différentiable[3] en si
- la dérivée directionnelle existe quel que soit ,
- l'application est linéaire continue.


On dit que f est continûment Gateaux-différentiable en si f est Gateaux-différentiable dans un voisinage V de x et est continue en x ; on a noté l'ensemble des opérateurs linéaires continus de E dans F, muni de sa norme canonique.


Fonction ayant des valeurs infinies
En analyse convexe ou non lisse, on utilise une notion de dérivée directionnelle, qui est essentiellement celle de Dini, mais qui accepte que les fonctions prennent leurs valeurs dans la droite réelle achevée . Les dérivées directionnelles peuvent elles-mêmes prendre leurs valeurs dans . Voici cette définition.


Soient E un espace vectoriel et une fonction. On dit que est directionnellement dérivable en dans la direction si la limite dans la définition de ci-dessous existe dans :



Cette définition est motivée par le résultat suivant qui assure la dérivabilité directionnelle des fonctions convexes, dans toutes les directions. On y a noté
- le domaine effectif de ;
- l'enveloppe affine d'une partie ;
- l'intérieur relatif d'un convexe .




Dérivée directionnelle d'une fonction convexe — Soient E un espace vectoriel, une fonction convexe, un point tel que est fini et . Alors

- la fonction
est croissante ; - existe dans (elle vaut éventuellement ou ) ;
- vaut si et seulement si pour tout ;
- ; en particulier, si l'une des deux dérivées directionnelles ou vaut l'autre vaut ;
- la fonction est sous-linéaire (en particulier convexe) ;
- si , alors
- le domaine de est le sous-espace vectoriel de E parallèle à ,
- si, de plus, E est un espace vectoriel normé, la fonction est lipschitzienne sur .












Ce résultat est utilisé pour définir le sous-différentiel d'une fonction convexe.
Dérivée directionnelle au sens de Hadamard
Soient E un espace vectoriel, F un espace vectoriel normé et une fonction. On dit que f est directionnellement dérivable au sens de Hadamard en dans la direction si la limite dans la définition de ci-dessous existe dans F :


Dérivée directionnelle au sens de Clarke
La présentation ci-dessous se fonde sur l'ouvrage de Clarke (1983)[4].
Définition
Soient E un espace de Banach et une fonction. La dérivée directionnelle de Clarke de f en x dans la direction est notée et définie par



Cette dérivée ne présuppose pas l'existence d'une limite ; elle existe toujours, mais elle peut cependant prendre une valeur infinie. L'utilité de cette dérivée directionnelle repose sur les propriétés suivantes.
Propriétés élémentaires — Si est lipschitzienne de module dans un voisinage de , alors


- la fonction prend des valeurs finies, est positivement homogène, sous-additive, lipschitzienne de module et on a
- la fonction est semi-continue supérieurement ;
- pour tout , on a .




La dérivée directionnelle de Clarke est utilisée pour définir le sous-différentiel de Clarke d'une fonction localement lipschitzienne.
Différentiabilité stricte
Le concept de différentiabilité naturellement relié à la dérivée directionnelle de Clarke est celui de différentiabilité stricte, que l'on trouve chez Bourbaki. La fonction considérée peut ici être à valeurs dans un espace vectoriel, pas seulement dans ; nous avons marqué ce fait en la désignant par F, plutôt que f.

Soient et deux espaces de Banach. Une fonction est dite strictement différentiable en si l'application





est linéaire continue et la limite est uniforme pour d dans un compact arbitraire.
Le résultat suivant apporte deux informations : d'une part, une fonction strictement différentiable en un point est nécessairement lipschitzienne dans un voisinage de ce point et, d'autre part, pour une fonction lipschitzienne, la différentiabilité stricte en un point est assurée sans que l'on ait besoin de vérifier la condition d'uniforme convergence pour des directions dans un compact.
Différentiabilité stricte et lipschitzianité — Soit une fonction définie dans le voisinage d'un point et un opérateur linéaire continu de dans . Alors les deux propriétés suivantes sont équivalentes :

- est strictement différentiable en et ;
- est lipschitzienne dans un voisinage de et



Une fonction continûment Gateaux-différentiable est strictement différentiable.
Gateaux et stricte différentiabilité — Une fonction F continûment Gateaux-différentiable en x est strictement différentiable en x (donc lipschitzienne dans un voisinage de x) et .

Fonction définie sur une variété
Définition
Soit f une fonction numérique sur une variété différentielle M. Avec une définition analogue à la précédente, il est loisible d'introduire la dérivée de f en un point m de M et dans la direction d'un vecteur tangent h en m à la variété. Comme la notion de droite dirigée par h n'a plus de sens, il faut la remplacer par une courbe passant par m et de vecteur tangent h en ce point.
Soit γ une courbe tracée sur M, continûment dérivable, vérifiant γ(0) = m et γ'(0) = h. Si la dérivée en 0 de f∘γ existe, elle est appelée dérivée de f au point m dans la direction de h. On montre en effet que cette définition ne dépend pas de la courbe γ convenable choisie.
Extension : dérivée de Lie
Si X est un champ de vecteurs sur la variété M et si f est une fonction numérique sur M, il est possible de calculer les dérivées partielles de f en chaque point p selon le vecteur X(p). La fonction obtenue en considérant toutes ces dérivées est notée et est appelée dérivée de Lie de f par X.


Pour calculer la dérivée de Lie de f, il est notamment possible de prendre pour courbes tangentes aux vecteurs X(p) les courbes intégrales du champ de vecteurs. La généralisation de ce point de vue à la dérivation des champs de vecteurs, formes différentielles et tenseurs est décrite à l'article « Dérivée de Lie ».
Notes et références
- F. Reinhardt et H. Soeder (trad. de l'allemand), Atlas des mathématiques, Paris, Librairie générale française, coll. « La Pochothèque », , 502 p. (ISBN 2-253-13013-3), « Calcul différentiel », p. 321.
- Michel Berliaire, « Introduction à l'optimisation différentiable », PPUR, , p. 35 et suiv.
- René Gateaux utilise ce concept sans vraiment l'approfondir dans Sur les fonctionnelles continues et les fonctionnelles analytiques, CRAS, vol. 157, 1913, p. 325-327 et Sur diverses questions de calcul fonctionnel, Bull. S.M.F, 50, 1-37, 1922.
- (en) F. H. Clarke, Optimization and Nonsmooth Analysis, New York, John Wiley & Sons, .
Voir aussi
Michel Delfour, Introduction à l'optimisation et au calcul semi-différentiel, Dunod, (lire en ligne), p. 88-92 : Exemples et contre-exemples