Cône convexe
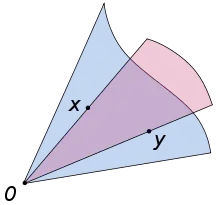
En algèbre linéaire, un cône convexe est une partie d'un espace vectoriel sur un corps ordonné qui est stable par combinaisons linéaires à coefficients strictement positifs.




Définition
Soit un corps ordonné, comme le corps des rationnels , celui des réels algébriques ou (plus couramment) celui des réels .



Un sous-ensemble d'un -espace vectoriel est un cône convexe si appartient à , pour tous scalaires strictement positifs , et tous , dans , ce qui s'écrit de façon plus succincte : pour tous .





Cette définition équivaut à : C est à la fois un cône (c'est-à-dire que λC ⊂ C pour tout λ > 0 — pour démontrer ⇒, on écrit λx = (λ/2)x + (λ/2)x) et un convexe (c'est-à-dire qu'il est stable par combinaisons convexes).
Plus simplement, un cône C est convexe si et seulement si C + C ⊂ C.
Exemples
L'ensemble vide et les sous-espaces vectoriels de V sont des cônes convexes.
Parmi d'autres exemples, on trouve :
- l'orthant positif (resp. strictement positif ) dans et plus généralement, dans ℝX, l'ensemble des fonctions qui sont positives (resp. strictement positives) sur une partie donnée de X ;
- l'ensemble ;
- le cornet ou cône du second ordre ou cône de Lorentz[1] ;
- les ensembles de matrices symétriques définies positives, semi-définies positives, copositives…





Pour tout convexe C de V, l'ensemble de tous les vecteurs λx tels que λ > 0 et x ∈ C est le plus petit cône convexe de V contenant C.
L'intersection de deux cônes convexes de V est un cône convexe, mais leur union peut être un cône non convexe.
La somme de deux cônes convexes de V est un cône convexe.
L'image d'un cône convexe par une application linéaire est un cône convexe. En particulier, si C est un cône convexe, il en est de même pour −C ; et C ∩ −C est le plus grand sous-espace vectoriel inclus dans C.
Les cônes tangents à un convexe sont convexes. Les cônes tangents et normaux sont des concepts importants dans les domaines de l'optimisation convexe, les inégalités variationnelles et les systèmes dynamiques projetés (en).
Le cône dual d'une partie quelconque est convexe.
Demi-espaces
Un hyperplan (vectoriel) de V est un sous-espace vectoriel maximum de V. Un demi-espace ouvert (resp. fermé) de V est un sous-ensemble H de V défini par L(x) > 0 (resp. L(x) ≥ 0), où L est une forme linéaire sur V. L'hyperplan défini par L(v) = 0 est l'hyperplan « bord » de H.
Les demi-espaces (ouverts ou fermés) sont des cônes convexes. De plus, dans un espace localement convexe, tout cône convexe fermé non vide et différent de V est une intersection de demi-espaces fermés.
Ordre partiel défini par un cône convexe
Un cône C convexe pointé et saillant est le cône positif de l'ordre partiel ≤ sur V défini par x ≤ y si et seulement si y – x ∈ C. (Si le cône n'est pas saillant, la même définition induit simplement préordre.) Si x ≤ y et x' ≤ y', alors on a x + x' ≤ y + y' et ax ≤ ay pour tout scalaire positif a. Un espace vectoriel muni d'un tel ordre est appelé un espace vectoriel ordonné. On peut citer comme exemples l'ordre produit sur Rn et l'ordre de Loewner (en) sur les matrices hermitiennes.
Références
- Appellation donnée par (en) Jacques Faraut et Adam Korányi, Analysis on Symmetric Cones, Oxford University Press, , p. 7.
, dont les références étaient :
- N. Bourbaki, Éléments de mathématique, Livre V : Espaces vectoriels topologiques, Springer,
- (en) R. Tyrrell Rockafellar, Convex Analysis, Princeton, NJ, Princeton University Press, (lire en ligne)
- (en) C. Zălinescu, Convex Analysis in General Vector Spaces, River Edge, NJ, World Scientific, , 367 p. (ISBN 981-238-067-1, MR 1921556, lire en ligne)